IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 06 | Jun-2014, Available @ http://www.ijret.org 461
ACTIVE POWER AND CURRENT CONTROL FOR A MODULAR
MULTILEVEL CONVERTER (MMC) BASED SYSTEM
Gayithri C
1
, R S Geetha
2
1
PG Scholar, Dept of Electrical and Electronics, BMS College of Engineering, Karnataka, India
2
Associate Professor, Dept of Electrical and Electronics, BMS College of Engineering, Karnataka, India
Abstract
Modular Multilevel Converter (MMC) has found very wide application in renewable energy sources, DC power transmission,
high voltage applications and micro grid. However the technical challenge of MMC is to maintain constant current, constant
power and constant voltage at the output depending on the requirement. In this paper a control loop is developed for maintaining
constant power at the MMC. The power controller is realized by using PI controller. The PWM technique used for generation of
gating pulses is Phase Disposition PWM (PD-PWM) technique, The simulation of current and the active power controller is
carried out by MATLAB/SIMULINK and the results are presented.
Keywords: Modular Multilevel Converter (MMC), Phase Disposition PWM (PD-PWM) technique, Proportional
Integral (PI) controller, Current controller, Sub Module (SM), and Active power controller.
--------------------------------------------------------------------***----------------------------------------------------------------------
1. INTRODUCTION
The MMC has found very wide application in High Voltage
DC (HVDC) power transmission, renewable energy sources,
and micro grids. The other well known topology is
multilevel topology, But it as few disadvantages such as it
can be used only in medium voltage application, The
number of components required increases as the voltage
level increases and number of the circuit components
increase proportional to the power capacity. Compared to
multilevel converter MMC has few advantages such as:
Harmonic distortion is found to be very less, due to
increased number of voltage levels compared to
that of a multilevel converter.
MMC circuit configuration is very simple
compared to multilevel converter.
Even when few of the sub modules are out of order,
the MMC can remain in operating state.
DC link current and arm current is found to be
continuous in MMC, hence the DC link capacitor
can be omitted [1].
2. MODULAR MULTILEVEL CONVERTER
(MMC)
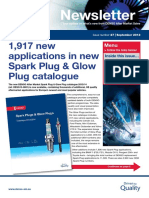
Fig-1, shows the MMC circuit that is considered for
simulation studies in this paper. It consist of six valves each
connecting one AC terminal and one DC terminal. Each
valve consists of a number of sub modules and each sub
module is a two level converter consisting of IGBTs
connected in series across the capacitor, with the midpoint
connection and one of the two capacitor terminals brought
out as external connections. The sub module can be either
half bridge or full bridge configuration. With a suitable
number of sub modules connected in series, the valve can
synthesize a stepped voltage waveform that approximates
very closely to a sine-wave and contains very low level of
harmonic distortion. The MMC differs from other types of
converter in that, current flows continuously in all six valves
of the converter throughout the cycle. The direct current
splits equally into the three phases and the alternating
current splits equally into the upper and lower valve of each
phase. The current in each valve is therefore, related to the
direct currentI
and alternating current I
ac
as follows [2].
Fig-1: Three-phase MMC.
Upper valve
I
v
=I
d
/3+I
ac
/2 (1)
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 06 | Jun-2014, Available @ http://www.ijret.org 462
Lower valve
I
v
=I
d
/3-I
ac
/2 (2)
Where, I
v
=valve current
I
d
=direct current
I
ac
=alternating current
PI based controllers are developed for constant DC voltage
as well as constant DC power for load variation. In this
regard a PI controller based power controller for MMC is
developed in this paper. The overall control scheme also
involves a current controller, which gets the input signal
from the power controller [3].
In this paper, half bridge configuration of sub module is
used to build MMC for controlling the current and active
power.
3. GATE PULSE GENERATION FOR MMC
USING PD-PWM METHOD
Fig-2: PD-PWM method waveform for 6level MMC.
Fig-3: Simulation model of PD-PWM method for 6 level
MMC.
In PD-PWM method all carrier waveforms are in phase. As
shown in Fig-2, here a-phase modulation signal is compared
with N-1 triangle waveforms, where N is the number of
levels Here Fig-3, shows the simulation model implemented
for 6 level MMC [4].
4. ACTIVE POWER AND CURRENT
CONTROLLER
The aim of the active power controller is to maintain a
constant active power at the reference value. The block
diagram of active power controller is shown in Fig-4, where
the current controller is in the inner loop of active power
controller [5].
Fig-4: Block diagram of active power controller.
Fig-5, shows the active power controller where the reference
active power P
ref
is fixed, the measured power P
ac
is
compared with P
ref
, difference is given to a PI controller
which controls the active power.
The Fig-6, shows the d component of current controller here
the current is controlled by using a PI controller, the output
of the PI controller is summed with the voltages as shown in
Fig-5, thus the modulating reference voltage of d component
is obtained [1].
Fig-7, shows the q component of current controller, where
the q component of current is controlled similar to that of
the d component.
The current controller is placed inside the power controller
loop for the control of active power.
Fig-5: Active power controller.
0 0.02 0.04 0.06 0.08 0.1
-1
-0.5
0
0.5
1
Time(s)
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 06 | Jun-2014, Available @ http://www.ijret.org 463
Fig-6: I
d
current controller.
Fig-7: I
q
current controller.
As seen from the Fig-5, Fig-6 and Fig-7, PI controller plays
a vital role for the control of active power and current.
Hence it is necessary to find accurate values of K
p
and K
i
for the active power and the current controller. The rating of
the system is chosen and the set of equations used for
finding the initial values of K
p
and K
i
are given below:
AC supply voltage : 3000kV (L-L rms)
P
dc
=10kw
P=3/2*V
b
I
b
(3)
V
ac
=mV
dc
/2 (4)
V
ac
is the peak phase voltage
P
dc
=3/2*V
b
I
b
=V
dc
I
dc
(5)
Z
base
=V
b
/I
b
(6)
L
base
=Z
b
/W
b
H (7)
w
b
=w
act
=314 radians
R
pu
=R
act
/R
base
(8)
Z
base
=R
base
K
p
=T
i
*R
pu
/2T
a
(9)
K
i
=K
p
/T
i
(10)
K
p
=0.524
K
i
=0.1483
Where, P
dc
=dc power output
V
dc
=dc voltage
P=ac power input
V
b
=base voltage
I
b
=base current
m=modulation index
Z
base
=base impedance
R
base
=base resistance
L
base
=base inductance
R
pu
=resistance in pu
T
i
=integral time constant
T
a
=average time
K
p
=proportional gain
K
i
=integral gain
The initial values of K
p
and K
i
are adjusted to get a good
response.
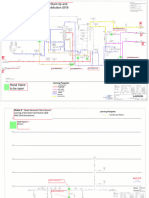
5. SIMULATION AND RESULTS
The Fig-8, shows the simulation model of a MMC with
current and active power controller.
Fig-9, and Fig-10, shows the performance of the current
controller under steady state condition. Fig. 9, is the
controlled I
d
current waveform for a reference current of
1pu. Fig-10, is the controller I
q
current waveform for a
reference current of 0pu. Fig-11, shows the performance of
the current controller under dynamic condition for a step
change in the reference I
d
current, the controller is able to
track the step change in the reference value with a time
delay of 0.2msec. Fig-12 and Fig-13, shows the d and q
component of modulation index of the reference
(modulating) voltage waveform.
Fig-8: Simulation model of active power and current
controller.
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 06 | Jun-2014, Available @ http://www.ijret.org 464
Fig- 9: Controlled I
d
current waveform.
Fig-10: Controlled I
q
current waveform.
Fig-11: Controlled I
d
current waveform under dynamic
condition.
Fig-12: Modulation index of d component waveform
Fig-13: Modulation index of q component waveform.
Fig-14: Modulating reference voltage waveform.
Fig-15: Controlled active power waveform.
Fig-16: Controlled active power waveform under dynamic
condition.
1 1.01 1.02 1.03 1.04 1.05
-4
-2
0
2
4
6
8
Time(s)
I
d
(
p
u
)
I
d
ref
I
d
actual
1 1.01 1.02 1.03 1.04 1.05
-60
-40
-20
0
20
40
60
Time(s)
I
q
(
p
u
)
I
q
ref
I
q
actual
1 1.02 1.04 1.06 1.08 1.1
-6
-4
-2
0
2
4
6
8
Time(s)
I
d
(
p
u
)
I
d
ref
I
d
actual
1 1.01 1.02 1.03 1.04 1.05
-10
-5
0
5
10
Time(s)
m
d
(
p
u
)
1 1.01 1.02 1.03 1.04 1.05
-10
-5
0
5
10
Time(s)
m
q
(
p
u
)
0 0.02 0.04 0.06 0.08 0.1
-2
-1
0
1
2
Time(s)
M
o
d
u
l
a
t
i
n
g
r
e
f
e
r
e
n
c
e
w
a
v
e
1 1.01 1.02 1.03 1.04 1.05
-4
-2
0
2
4
6
8
Time(s)
A
c
t
i
v
e
p
o
w
e
r
(
p
u
)
P ref
p actual
1 1.05 1.1 1.15 1.2
-4
-2
0
2
4
6
Time(s)
A
c
t
i
v
e
p
o
w
e
r
(
p
u
)
p ref
p actual
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 06 | Jun-2014, Available @ http://www.ijret.org 465
Fig-14, shows the modulating reference voltage waveform
generated. Fig-15, shows the performance of the active
power controller waveform for a reference active power of
1pu under steady state condition and the Fig-16, shows the
performance of the active power controller under dynamic
condition, that is for a step change in the reference active
power the controller is able to track the step change in the
reference value with a time delay of 0.2msec.
6. CONCLUSIONS
In this work, the gating pulse generation for a MMC using
PD-PWM technique is developed and the output of the
MMC is observed. Controllers are developed by using PI
controller for control of current and active power, the
performance of the controller is verified under steady state
and under dynamic condition, the controller is found to be
working good and it is able to track the step change in the
reference value with a time delay of 0.2msec. The work can
be further extended to implement reactive power controller.
REFERENCES
[1] ZHAO Yan, HU Xue-hao, TANG Guang-fu, HE Zhi-
yuan, A study of MMC model and its current
control strategies, China Electric Power Research
Institute, Haidian District, Beijing China, 2nd IEEE
International Symposium on Power Electronics for
Distributed Generation Systems 2010
[2] Elisabeth Nokleby Abildgaard,Exploring the
properties of Modular Multilevel Converter based
HVDC link, Master of Energy and Environmental
Engineering, Department of Electric Power
Engineering, Norwegian University of Science and
Technology.
[3] Agrawal.S, Geetha R S, Controllers for voltage
source converters, Emerging trends in
communication, control, signal processing and
computing applications (C2SPCA), 2013
international conference on 10-11 Oct.2013
[4] Georgios S Konstantinou, Vassilios G Agelidis,
performance evaluation of half bridge cascaded
multilevel converters operated with multicarrier
sinusoidal PWM techniques, school of electrical and
information engineering, The university of Sydney
NSW 2006, Australia
[5] Wei LI, Luc-Andre Greigoire, Jean Belanger OPAL-
RT technologies, Control and performance of
Modular Multilevel Converter System, Cigre
Canada, Conference on power systems Halifax,
September 6-8, 2011
BIOGRAPHIES
Gayithri.C received the B.E. degree in
Electrical and Electronics Engineering
from Dr.T.Thimmaiah Institute of
Technology, VTU, Kolar Gold Fields,
Karnataka India, in 2012, and is currently
pursuing the M.Tech degree in Power
Electronics from BMS College of Engineering, VTU,
Bangalore, Karnataka, India. Her research interests includes
in the areas of Power Electronics, and HVDC.
R.S.Geetha received the B.E. degree in
Electrical Engineering in the year 1993
and M.E. degree in Power Electronics
from Bangalore University in 1999. At
present, she is working in the Department
of Electrical and Electronics Engineering,
BMS College of Engineering, Bangalore, Karnataka, India.
She is pursuing her Ph.D. at the same institution. Her
research interests are in the areas of Power Electronics,
HVDC and FACTS.
Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- API Standards ListДокумент9 страницAPI Standards ListSohail Aziz Ahmad MalikОценок пока нет
- 80ZV 2Документ12 страниц80ZV 2mhmd_saad100% (2)
- ItysДокумент32 страницыItysciohaniОценок пока нет
- RCR Products BrochureДокумент10 страницRCR Products BrochureBOОценок пока нет
- State of Industry Report 2020 PDFДокумент205 страницState of Industry Report 2020 PDFimranОценок пока нет
- Phy Sci PartIДокумент318 страницPhy Sci PartIsollu786_889163149Оценок пока нет
- Pcc-Ee 303Документ2 страницыPcc-Ee 303Amlan SarkarОценок пока нет
- Commissioning NotesДокумент13 страницCommissioning NotesÇınar İnalОценок пока нет
- Topic 1 Stoichiometric RelationshipsДокумент56 страницTopic 1 Stoichiometric Relationshipsapi-546066323Оценок пока нет
- 1,917 New Applications in New Spark Plug & Glow Plug CatalogueДокумент6 страниц1,917 New Applications in New Spark Plug & Glow Plug Catalogue08088338Оценок пока нет
- KennedyДокумент4 страницыKennedyMichael SalvahanОценок пока нет
- Washing Machine: Service ManualДокумент41 страницаWashing Machine: Service Manualimagex5Оценок пока нет
- TNB Iar 2020Документ360 страницTNB Iar 2020yerio.dwiyantoОценок пока нет
- Analisis Soalan Fizik Kertas 2 BHG A Trial SPM 2010Документ3 страницыAnalisis Soalan Fizik Kertas 2 BHG A Trial SPM 2010Norhazami HashimОценок пока нет
- Operationalization of Regenerative Design Indicators An Integrated Framework of Design and AnalysisДокумент10 страницOperationalization of Regenerative Design Indicators An Integrated Framework of Design and AnalysisVera MarinОценок пока нет
- GE Multilin 369 SpecificationsДокумент11 страницGE Multilin 369 SpecificationsMichael adu-boahenОценок пока нет
- A GCE Physics B 2865 01 January 2006 Question PaperДокумент24 страницыA GCE Physics B 2865 01 January 2006 Question PaperMitul KaziОценок пока нет
- Advanced Motion Controls FC1010Документ7 страницAdvanced Motion Controls FC1010Servo2GoОценок пока нет
- Windbox M 2000 AДокумент2 страницыWindbox M 2000 ADU A NEОценок пока нет
- From Newton To Mandelbrot-A Primer in Theoretical PhysicsДокумент277 страницFrom Newton To Mandelbrot-A Primer in Theoretical PhysicsΠΑΝΑΓΙΩΤΗΣ ΨΥΧΑΣ100% (1)
- Climate Change: Frequently Asked QuestionsДокумент8 страницClimate Change: Frequently Asked QuestionsAdriano Racho MelendresОценок пока нет
- EN13480-3 Chap12 ModificationsДокумент37 страницEN13480-3 Chap12 ModificationsPrashant ChauhanОценок пока нет
- Penggantian Relay Dist Ke LCD & Progress Koordinasi Penghantar Dan PembangkitДокумент11 страницPenggantian Relay Dist Ke LCD & Progress Koordinasi Penghantar Dan PembangkitCahyo Tri HartoyoОценок пока нет
- Data Sheet P30-2Документ4 страницыData Sheet P30-2Vlade NaumovskiОценок пока нет
- VCA Evaporative Condenser Parts MapДокумент2 страницыVCA Evaporative Condenser Parts MapJunior Montalvo cruzОценок пока нет
- Genset DataДокумент12 страницGenset DatagebreОценок пока нет
- CF750Документ9 страницCF750Shilpi VirmaniОценок пока нет
- 2.pressure and HeadДокумент36 страниц2.pressure and HeadIhsan Samoh เพี่อนดีดีОценок пока нет
- 3tf ContactorДокумент25 страниц3tf Contactorpadminitt100% (1)
- Dh3 Generation Lototo Plan Phase 2 RGC 08sep2023Документ8 страницDh3 Generation Lototo Plan Phase 2 RGC 08sep2023Borislav VulicОценок пока нет