Вам также может понравиться
- A Phasor-Data-Based State Estimator Incorporating Phase Bias CorrectionДокумент9 страницA Phasor-Data-Based State Estimator Incorporating Phase Bias CorrectionirismoraesОценок пока нет
- 3 Jpe-11050Документ8 страниц3 Jpe-11050irismoraesОценок пока нет
- Electrical Model Development and Validation For Distributed ResourcesДокумент58 страницElectrical Model Development and Validation For Distributed ResourcesirismoraesОценок пока нет
- For Next Class, I Want You To Read and Understand The Text BelowДокумент1 страницаFor Next Class, I Want You To Read and Understand The Text BelowirismoraesОценок пока нет
- Derek A. Paice-Power Electronics Converter Harmonics Multipulse Methodsfor Clean Power-Ieee (1995)Документ113 страницDerek A. Paice-Power Electronics Converter Harmonics Multipulse Methodsfor Clean Power-Ieee (1995)HemaSinghОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Data Sheet Eldar Void SpinnerДокумент1 страницаData Sheet Eldar Void SpinnerAlex PolleyОценок пока нет
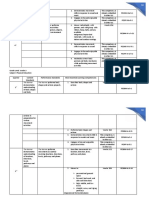
- Internship Report Format For Associate Degree ProgramДокумент5 страницInternship Report Format For Associate Degree ProgramBisma AmjaidОценок пока нет
- Poetry UnitДокумент212 страницPoetry Unittrovatore48100% (2)
- Understanding and Teaching Fractions: Sybilla BeckmannДокумент26 страницUnderstanding and Teaching Fractions: Sybilla Beckmannjhicks_mathОценок пока нет
- Measuring Temperature - Platinum Resistance ThermometersДокумент3 страницыMeasuring Temperature - Platinum Resistance Thermometersdark*nightОценок пока нет
- Adjective & VerbsДокумент3 страницыAdjective & VerbsDennis BerkОценок пока нет
- The Privatization PolicyДокумент14 страницThe Privatization PolicyRIBLEN EDORINAОценок пока нет
- 2 To 20 Years - Girls Stature-For-Age and Weight-For-Age PercentilesДокумент1 страница2 To 20 Years - Girls Stature-For-Age and Weight-For-Age PercentilesRajalakshmi Vengadasamy0% (1)
- ADC of PIC MicrocontrollerДокумент4 страницыADC of PIC Microcontrollerkillbill100% (2)
- Pipe Cleaner Lesson PlanДокумент2 страницыPipe Cleaner Lesson PlanTaylor FranklinОценок пока нет
- Iphone and Ipad Development TU GrazДокумент2 страницыIphone and Ipad Development TU GrazMartinОценок пока нет
- 1995 Biology Paper I Marking SchemeДокумент13 страниц1995 Biology Paper I Marking Schemetramysss100% (2)
- 5066452Документ53 страницы5066452jlcheefei9258Оценок пока нет
- Introduction To DifferentiationДокумент10 страницIntroduction To DifferentiationaurennosОценок пока нет
- Implications of A Distributed Environment Part 2Документ38 страницImplications of A Distributed Environment Part 2Joel wakhunguОценок пока нет
- Moquerio - Defense Mechanism ActivityДокумент3 страницыMoquerio - Defense Mechanism ActivityRoxan MoquerioОценок пока нет
- MSC-MEPC.2-Circ.17 - 2019 Guidelines For The Carriage of Blends OfBiofuels and Marpol Annex I Cargoes (Secretariat)Документ4 страницыMSC-MEPC.2-Circ.17 - 2019 Guidelines For The Carriage of Blends OfBiofuels and Marpol Annex I Cargoes (Secretariat)DeepakОценок пока нет
- PE MELCs Grade 3Документ4 страницыPE MELCs Grade 3MARISSA BERNALDOОценок пока нет
- SecuritizationДокумент46 страницSecuritizationHitesh MoreОценок пока нет
- AssignmentДокумент47 страницAssignmentHarrison sajorОценок пока нет
- All Day Breakfast: .Served With Cappuccino or Espresso or Lime Juice or TeaДокумент7 страницAll Day Breakfast: .Served With Cappuccino or Espresso or Lime Juice or TeaBryan KuoKyОценок пока нет
- Eurocode 3: Design of Steel Structures "ReadyДокумент26 страницEurocode 3: Design of Steel Structures "Readywazydotnet80% (10)
- HepaДокумент1 страницаHepasenthilarasu5100% (1)
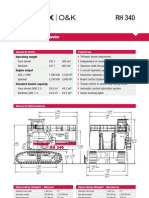
- Hydraulic Mining ExcavatorДокумент8 страницHydraulic Mining Excavatorasditia_07100% (1)
- Math 9 Quiz 4Документ3 страницыMath 9 Quiz 4Lin SisombounОценок пока нет
- Wwii TictactoeДокумент2 страницыWwii Tictactoeapi-557780348Оценок пока нет
- Smart Gas Leakage Detection With Monitoring and Automatic Safety SystemДокумент4 страницыSmart Gas Leakage Detection With Monitoring and Automatic Safety SystemYeasin Arafat FahadОценок пока нет
- Gaming Ports MikrotikДокумент6 страницGaming Ports MikrotikRay OhmsОценок пока нет
- Bandhan Neft Rtgs FormДокумент2 страницыBandhan Neft Rtgs FormMohit Goyal50% (4)
- Soil NailingДокумент6 страницSoil Nailingvinodreddy146Оценок пока нет