Вам также может понравиться
- Input Shaping&PIDДокумент320 страницInput Shaping&PIDTho Ho DucОценок пока нет
- Input Shaping&PIDДокумент320 страницInput Shaping&PIDTho Ho DucОценок пока нет
- NoteДокумент1 страницаNotelyhuehue01Оценок пока нет
- NoteДокумент1 страницаNotelyhuehue01Оценок пока нет
- Paper6253 2632Документ11 страницPaper6253 2632Tho Ho DucОценок пока нет
- Chapter 2: 8255 Programmable Peripheral Interface: Department of MechatronicsДокумент29 страницChapter 2: 8255 Programmable Peripheral Interface: Department of MechatronicsTho Ho DucОценок пока нет
- 21003235Документ3 страницы21003235Tho Ho DucОценок пока нет
- Datasheet Atmega32Документ346 страницDatasheet Atmega32Mas NyamОценок пока нет
- E2-01 - Overview of RobotsДокумент22 страницыE2-01 - Overview of RobotsTho Ho DucОценок пока нет
- 21003235Документ3 страницы21003235Tho Ho DucОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
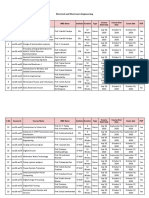
- Electrical and Electronics EngineeringДокумент4 страницыElectrical and Electronics EngineeringPrithaBanerjeeОценок пока нет
- Ieee Guide For Designing A Time Synchronization System For Power PDFДокумент118 страницIeee Guide For Designing A Time Synchronization System For Power PDFTAUSTAT JVSОценок пока нет
- Advances in Analog Circuits PDFДокумент380 страницAdvances in Analog Circuits PDFnskprasad89100% (1)
- 8.1 Mux 2Документ4 страницы8.1 Mux 2Maddy TrichyОценок пока нет
- DEsign and Implementation of PID On FPGAДокумент6 страницDEsign and Implementation of PID On FPGAdhirendraОценок пока нет
- Diagramas Esquematicos TV LED LGДокумент49 страницDiagramas Esquematicos TV LED LGLuis Alonso Rosero Velez100% (1)
- Passenger Bus Alert System For Easy Navigation of BlindДокумент5 страницPassenger Bus Alert System For Easy Navigation of BlindArshad Mohammed0% (1)
- Flyback Transformers: SchematicsДокумент2 страницыFlyback Transformers: Schematicscatsoithahuong84Оценок пока нет
- EK 2009 Complete EДокумент260 страницEK 2009 Complete EABELWALIDОценок пока нет
- Investigatory Project of PhysicsДокумент19 страницInvestigatory Project of Physicsshubham singhОценок пока нет
- Trafomonitor IKI-30: ManualДокумент19 страницTrafomonitor IKI-30: Manualts4530667% (3)
- Multilin EPM 7000P: Grid SolutionsДокумент14 страницMultilin EPM 7000P: Grid SolutionsMohammad ShreatehОценок пока нет
- V382 - 20 (00205363) - DecryptДокумент27 страницV382 - 20 (00205363) - Decryptleodias.souzaОценок пока нет
- Embedded & Real Time Systems Notes by Suman KalyanДокумент20 страницEmbedded & Real Time Systems Notes by Suman KalyanDaniel Paul100% (2)
- Commander SE Product DataДокумент23 страницыCommander SE Product Dataramon navaОценок пока нет
- Electronics Quantum 1st YearДокумент97 страницElectronics Quantum 1st YearHarsh BathamОценок пока нет
- d301673x012 Modulo de Comunicaciones Serial ControlwaveДокумент4 страницыd301673x012 Modulo de Comunicaciones Serial ControlwaveMisael Castillo CamachoОценок пока нет
- Inverse Time Overcurrent Relaying Decision For Protection of Three Phase Transmission LineДокумент5 страницInverse Time Overcurrent Relaying Decision For Protection of Three Phase Transmission LineNandi ?Оценок пока нет
- Quadrature EncoderДокумент5 страницQuadrature EncoderJaime Santiago Sanchez ReinosoОценок пока нет
- High-Diode-SS24 C466500Документ4 страницыHigh-Diode-SS24 C466500Amine SalimeОценок пока нет
- 26MF605W - LCD TV MonitorДокумент108 страниц26MF605W - LCD TV MonitorJesus SilvaОценок пока нет
- Drayvery PMSM Servodvigateley Seriya Kbs MG User Guide EngДокумент315 страницDrayvery PMSM Servodvigateley Seriya Kbs MG User Guide EngAxel MurellerОценок пока нет
- High Ratio Vertical PCB Mount Current Transformer: Cr8300 SeriesДокумент1 страницаHigh Ratio Vertical PCB Mount Current Transformer: Cr8300 SeriesAbdul RahmanОценок пока нет
- Zenitel - ESC-1 - 1023000000Документ4 страницыZenitel - ESC-1 - 1023000000amir11601Оценок пока нет
- Manual de Serviço - KDL-32CX525 - KDL-40CX525 - KDL-46CX525 BR Chassis AZ2-F PDFДокумент64 страницыManual de Serviço - KDL-32CX525 - KDL-40CX525 - KDL-46CX525 BR Chassis AZ2-F PDFMarco KersulОценок пока нет
- NITROX 12152025KW 3Ph 5G Updated SmallДокумент24 страницыNITROX 12152025KW 3Ph 5G Updated SmallAbdulrehman SoomroОценок пока нет
- Pantalla Haier HLT71 PDFДокумент8 страницPantalla Haier HLT71 PDFErnesto PerezОценок пока нет
- Industrial Electronic ReportДокумент5 страницIndustrial Electronic ReportAkmal HazimОценок пока нет
- Basic Electrical Characteristics and Application Designs of Low-I PhotocouplersДокумент31 страницаBasic Electrical Characteristics and Application Designs of Low-I PhotocouplersWagner MirandaОценок пока нет
- Control SystemsДокумент25 страницControl Systemskakaka12Оценок пока нет