Вам также может понравиться
- Advanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994От EverandAdvanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Оценок пока нет
- Algorithms For Planning S-CurveДокумент8 страницAlgorithms For Planning S-Curvebeemer03Оценок пока нет
- Multiresolution Signal Decomposition: Transforms, Subbands, and WaveletsОт EverandMultiresolution Signal Decomposition: Transforms, Subbands, and WaveletsОценок пока нет
- Mathematics of Motion Control ProfilesДокумент5 страницMathematics of Motion Control ProfilesGirish KasturiОценок пока нет
- Linear Motor BasicДокумент7 страницLinear Motor BasicSairam SirasapalliОценок пока нет
- Intro To CNC and Main Parts of CNCДокумент18 страницIntro To CNC and Main Parts of CNCsank_knasОценок пока нет
- 2004-10 Linear MotorДокумент11 страниц2004-10 Linear MotorSupatmono NAIОценок пока нет
- Unit 4 CADДокумент45 страницUnit 4 CADiampiyushsahuОценок пока нет
- Regenerative Braking SystemДокумент34 страницыRegenerative Braking SystemJabiОценок пока нет
- Eddy Current and Flux Density Distribution AnalysisДокумент3 страницыEddy Current and Flux Density Distribution AnalysisMATHANKUMAR.SОценок пока нет
- A Linear Motor or Linear Induction Motor Is An Alternating CurrentДокумент6 страницA Linear Motor or Linear Induction Motor Is An Alternating CurrentAnand KanaujiyaОценок пока нет
- Automotive Active Suspension - Case Study On H-Infinity ControlДокумент6 страницAutomotive Active Suspension - Case Study On H-Infinity Controlmallikarjuna.handiОценок пока нет
- Brochure Jenny Science EДокумент12 страницBrochure Jenny Science EOLIVETOОценок пока нет
- Automatic Drilling Machine Using PLC IJISETДокумент6 страницAutomatic Drilling Machine Using PLC IJISETTimothy FieldsОценок пока нет
- 3D Projective Geometric AlgebraДокумент2 страницы3D Projective Geometric AlgebradeletОценок пока нет
- Research ArticleДокумент8 страницResearch ArticleJoseph IRANZIОценок пока нет
- 2robot Applications Main8Документ55 страниц2robot Applications Main8saikumarОценок пока нет
- MAGLEV TrainsДокумент5 страницMAGLEV TrainsAditya 苏巴马廉 IyerОценок пока нет
- Me III II DMM II LnotesДокумент33 страницыMe III II DMM II LnotesChandu MallamОценок пока нет
- AIREX Linear Motor Vacuum CompatabilityДокумент3 страницыAIREX Linear Motor Vacuum Compatabilitymsahin1955Оценок пока нет
- LinMot Catalogo Geral PDFДокумент408 страницLinMot Catalogo Geral PDFnemzinhoОценок пока нет
- As ISO 14649.1-2004 Industrial Automation Systems and Integration - Physical Device Control - Data Model ForДокумент8 страницAs ISO 14649.1-2004 Industrial Automation Systems and Integration - Physical Device Control - Data Model ForSAI Global - APACОценок пока нет
- Braam Daniels Pulsed Linear Induction MotorДокумент203 страницыBraam Daniels Pulsed Linear Induction MotorKael XelОценок пока нет
- Flat Voice Coil ActuatorsДокумент12 страницFlat Voice Coil ActuatorspoorianaОценок пока нет
- Speed Control of Switched Reluctance Motor-LibreДокумент9 страницSpeed Control of Switched Reluctance Motor-LibreIndrajithSrОценок пока нет
- Linear DC MotorДокумент13 страницLinear DC MotorrahulkudluОценок пока нет
- Stepper Motor KTДокумент18 страницStepper Motor KTSankula Siva SankarОценок пока нет
- IX Iron Core Linear MotorДокумент20 страницIX Iron Core Linear MotorjuliangoalОценок пока нет
- Balancing RobotДокумент5 страницBalancing RobotMilton MuñozОценок пока нет
- Fundamentals of Lyapunov TheoryДокумент9 страницFundamentals of Lyapunov Theorygoitom01Оценок пока нет
- Safety Guidelines For Direct DrivesДокумент9 страницSafety Guidelines For Direct DrivesJOseОценок пока нет
- Robotic Sensors: Robot Actuators - Different TypesДокумент4 страницыRobotic Sensors: Robot Actuators - Different Typesmohan_rapaka100% (1)
- Fibermak G-Force Fiber Laser PDFДокумент13 страницFibermak G-Force Fiber Laser PDFJake MillerОценок пока нет
- Quadruped Walking Running SimulationДокумент49 страницQuadruped Walking Running SimulationbilynbkОценок пока нет
- Motor BasicsДокумент23 страницыMotor BasicsDr. S. KUDIYARASANОценок пока нет
- Sysml Tutorial PDFДокумент20 страницSysml Tutorial PDFDaniel Stiven TamayoОценок пока нет
- I17E-EN-02 LinearMotors DatasheetДокумент26 страницI17E-EN-02 LinearMotors DatasheetMario StoyanovОценок пока нет
- AGV - Automatic Guided Vehicle Sizing ToolДокумент4 страницыAGV - Automatic Guided Vehicle Sizing TooldavidОценок пока нет
- Hydrostatic PM Controller Contributes To Accuracy of Machining Operations and Machine Service LifeДокумент5 страницHydrostatic PM Controller Contributes To Accuracy of Machining Operations and Machine Service LifeRadhakrishnan ChinnavadanОценок пока нет
- ARM ArchitectureДокумент9 страницARM Architectureultimatekp144Оценок пока нет
- EncoderДокумент44 страницыEncoderdaiduongxanh14113Оценок пока нет
- Industrial Robots Manipulator StructuresДокумент18 страницIndustrial Robots Manipulator StructuresTharindu Eranga FernandoОценок пока нет
- ABB - General Purpose Motors Cast Iron - GB 092003Документ49 страницABB - General Purpose Motors Cast Iron - GB 092003ivanjaviergutierrezoОценок пока нет
- Emerging TrendДокумент9 страницEmerging TrendMahendra VarmanОценок пока нет
- Localized Feature ExtractionДокумент6 страницLocalized Feature ExtractionsujithaОценок пока нет
- Experimental Study of Thrusts of A Cylindrical Linear Synchronous Motor With One or More YBCO Bulk Magnets As The Excitation SystemДокумент6 страницExperimental Study of Thrusts of A Cylindrical Linear Synchronous Motor With One or More YBCO Bulk Magnets As The Excitation SystemravinderreddynОценок пока нет
- ESI4523 Simulation NotesДокумент23 страницыESI4523 Simulation NotesSamuel SmithОценок пока нет
- Analysis in AdamsДокумент5 страницAnalysis in AdamsProduct DominixОценок пока нет
- Moog Valves D633 D634 Catalog enДокумент14 страницMoog Valves D633 D634 Catalog enPritam SinghОценок пока нет
- Valvula Proporcional Série d633 e d634Документ16 страницValvula Proporcional Série d633 e d634Lucas Vinícius CostaОценок пока нет
- SERVOMOTORES OMRON g5 - Series - I815-E1 - 29 - 19 - csm2106 PDFДокумент59 страницSERVOMOTORES OMRON g5 - Series - I815-E1 - 29 - 19 - csm2106 PDFHebert Javier RengifoОценок пока нет
- 2 Robotic Systems ConfigurationsДокумент22 страницы2 Robotic Systems ConfigurationsAdam MahmoodОценок пока нет
- Stepper MotorДокумент26 страницStepper MotorSupriya Rakshit100% (1)
- Inverse Kinematics PUMA 762 SimulatorДокумент1 страницаInverse Kinematics PUMA 762 SimulatorMuhammad ZulfiqarОценок пока нет
- Mechanisms Final ReportДокумент44 страницыMechanisms Final ReportOmar SaleemОценок пока нет
- Jung Do Suh (Damping Factor)Документ9 страницJung Do Suh (Damping Factor)fatinОценок пока нет
- Flowcode Introductory Course PDFДокумент12 страницFlowcode Introductory Course PDFmawunyoОценок пока нет
- Blocked Rotor TestДокумент11 страницBlocked Rotor TestIjabi100% (1)
- BLDC Motor Control ANfpgaДокумент8 страницBLDC Motor Control ANfpgasraamu2k55068100% (1)
- Report On Four Bar Mechanism of Sewing MachineДокумент8 страницReport On Four Bar Mechanism of Sewing MachineshazedislamОценок пока нет
- 1 BTN Remote - Eng Spa PDFДокумент2 страницы1 BTN Remote - Eng Spa PDFfmjmxОценок пока нет
- TG PaperДокумент8 страницTG PaperfmjmxОценок пока нет
- Adm2587e 82eДокумент2 страницыAdm2587e 82efmjmxОценок пока нет
- VW MKIV Golf-Jetta 1.8T EVAP System ServicingДокумент88 страницVW MKIV Golf-Jetta 1.8T EVAP System Servicingfmjmx100% (1)
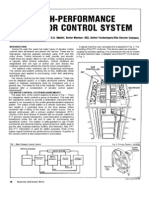
- High-Performance Elevator Control SystemДокумент5 страницHigh-Performance Elevator Control SystemEdna MorenoОценок пока нет
- An Essay On Condensed Matter Physics in The Twentieth CenturyДокумент19 страницAn Essay On Condensed Matter Physics in The Twentieth CenturyEmmanuel ZamoranoОценок пока нет
- Large Open Pit Slope StabilityДокумент53 страницыLarge Open Pit Slope Stabilitysaifuddin_ariefОценок пока нет
- Manual D12RДокумент179 страницManual D12RHennis Alfonzo100% (1)
- Acid Base SillabyДокумент6 страницAcid Base SillabyNurani Attaukhidah 'AzyyatiОценок пока нет
- Thesis SynopsisДокумент4 страницыThesis Synopsisbhavdip_shahОценок пока нет
- Spec Sheet Pegasus BT 4DДокумент2 страницыSpec Sheet Pegasus BT 4DWempic Aulia FauziОценок пока нет
- De Silva Clarence W Sensors and Actuators Control Systems InstrumentationДокумент346 страницDe Silva Clarence W Sensors and Actuators Control Systems Instrumentationjhon jairoОценок пока нет
- (電動機械L4d補充教材) UW E.F. EL-Saadany Magnetic CircuitsДокумент10 страниц(電動機械L4d補充教材) UW E.F. EL-Saadany Magnetic CircuitsLam Sin WingОценок пока нет
- Manual Ventas Teja Gravillada DecraДокумент4 страницыManual Ventas Teja Gravillada Decrabproano3992Оценок пока нет
- Junior High School Department: Caldwell Adventist AcademyДокумент3 страницыJunior High School Department: Caldwell Adventist Academyrosanie remotinОценок пока нет
- Effect of Heat Tretment On Hardness of 6082 t6 Alminium AlloyДокумент5 страницEffect of Heat Tretment On Hardness of 6082 t6 Alminium AlloyRohit SharmaОценок пока нет
- EE364 Maxwell Simulation Assignment 1Документ37 страницEE364 Maxwell Simulation Assignment 1jalilemadiОценок пока нет
- Module 9 - RoboticsДокумент20 страницModule 9 - RoboticsdharshanirymondОценок пока нет
- 11 Chemistry Notes Ch02 Structure of AtomДокумент18 страниц11 Chemistry Notes Ch02 Structure of AtomSayantanBanerjee0% (1)
- Asha - BeraДокумент36 страницAsha - BeraCarito Rivas100% (1)
- WRC368Документ33 страницыWRC368fahid masoodОценок пока нет
- Physical Chemistry Chapter 10 1 AtkinsДокумент32 страницыPhysical Chemistry Chapter 10 1 AtkinswenОценок пока нет
- FM 3e SI Chap09 LectureДокумент111 страницFM 3e SI Chap09 LectureRuben SegarОценок пока нет
- Colloids and Surfaces A: Physicochemical and Engineering AspectsДокумент11 страницColloids and Surfaces A: Physicochemical and Engineering AspectsFernando HenriqueОценок пока нет
- ArpivaДокумент8 страницArpivavahrmОценок пока нет
- Coordinate Reference SystemsДокумент120 страницCoordinate Reference SystemsBenciu Florin ValentinОценок пока нет
- Serv - Chula.ac - TH Tarporn 487 HandOut DynamicCДокумент38 страницServ - Chula.ac - TH Tarporn 487 HandOut DynamicCAaditya RoyОценок пока нет
- Combur 10 M 100 STR - EsДокумент2 страницыCombur 10 M 100 STR - EsVictor Manuel Parra Torres50% (4)
- k3 B No. 2 Set 1Документ4 страницыk3 B No. 2 Set 1koonweiОценок пока нет
- Chemistry Syllabus Mapping IITJAM NET GATE BSC MSCДокумент39 страницChemistry Syllabus Mapping IITJAM NET GATE BSC MSCAshwani KumarОценок пока нет
- Control Theory II - Homework 1-Chapter 1: 1 ProblemsДокумент2 страницыControl Theory II - Homework 1-Chapter 1: 1 ProblemsSantiago Orellana CОценок пока нет
- Composite Failure AnalysisДокумент251 страницаComposite Failure AnalysisFernandoОценок пока нет
- Dimensioning: Bushra Fatima NED University of Engineering & TechnologyДокумент41 страницаDimensioning: Bushra Fatima NED University of Engineering & TechnologyAbdul RashidОценок пока нет
- Introduction To Process Engineering SkillsДокумент9 страницIntroduction To Process Engineering SkillsJia Kai LowОценок пока нет
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldОт EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (55)
- Cyber War: The Next Threat to National Security and What to Do About ItОт EverandCyber War: The Next Threat to National Security and What to Do About ItРейтинг: 3.5 из 5 звезд3.5/5 (66)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityОт EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityРейтинг: 5 из 5 звезд5/5 (1)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОт EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОценок пока нет
- Algorithms to Live By: The Computer Science of Human DecisionsОт EverandAlgorithms to Live By: The Computer Science of Human DecisionsРейтинг: 4.5 из 5 звезд4.5/5 (722)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldОт EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (107)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyОт EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyРейтинг: 3.5 из 5 звезд3.5/5 (111)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceОт EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (5)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesОт EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesОценок пока нет
- Chip War: The Quest to Dominate the World's Most Critical TechnologyОт EverandChip War: The Quest to Dominate the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (228)
- Generative AI: The Insights You Need from Harvard Business ReviewОт EverandGenerative AI: The Insights You Need from Harvard Business ReviewРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekОт EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekРейтинг: 4.5 из 5 звезд4.5/5 (7)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОт Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesОт EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesОценок пока нет
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОт EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОценок пока нет
- Artificial Intelligence: A Guide for Thinking HumansОт EverandArtificial Intelligence: A Guide for Thinking HumansРейтинг: 4.5 из 5 звезд4.5/5 (30)
- The World's Most Dangerous Geek: And More True Hacking StoriesОт EverandThe World's Most Dangerous Geek: And More True Hacking StoriesРейтинг: 4 из 5 звезд4/5 (49)
- Excel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsОт EverandExcel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsОценок пока нет
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideОт EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideРейтинг: 5 из 5 звезд5/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkОт EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkРейтинг: 4 из 5 звезд4/5 (7)
- The Internet Con: How to Seize the Means of ComputationОт EverandThe Internet Con: How to Seize the Means of ComputationРейтинг: 5 из 5 звезд5/5 (6)