Вам также может понравиться
- Lab 2 - Uso de Display 7 Segmentos en Arduino. Entradas AnalogicasДокумент27 страницLab 2 - Uso de Display 7 Segmentos en Arduino. Entradas Analogicasroger david pimienta barrosОценок пока нет
- Elec 562Документ6 страницElec 562MOHAMMEDОценок пока нет
- WWW Sparkfun Com Tutorials 240Документ14 страницWWW Sparkfun Com Tutorials 240ramnag4Оценок пока нет
- MES MODULE 5 Programming Using ArduinoДокумент41 страницаMES MODULE 5 Programming Using Arduinodaniel007workОценок пока нет
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Документ29 страницInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaОценок пока нет
- ArdproДокумент29 страницArdproMd. Ibrahim HossainОценок пока нет
- IOT1Документ23 страницыIOT1thesoulmatecreationОценок пока нет
- Round Two GuideДокумент13 страницRound Two GuideSarmad AhmadОценок пока нет
- STM32 GpioДокумент5 страницSTM32 Gpioमेनसन लाखेमरू100% (1)
- 1 2 3 MergedДокумент38 страниц1 2 3 MergedthesoulmatecreationОценок пока нет
- 19ECE181-Electronics System LabДокумент14 страниц19ECE181-Electronics System LabThanvithaОценок пока нет
- Iot Record111Документ53 страницыIot Record111Mohammed ShahidОценок пока нет
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Документ13 страницDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnОценок пока нет
- 16-B D S P A/D C: FeaturesДокумент60 страниц16-B D S P A/D C: FeatureskrajasekarantutiОценок пока нет
- Comsats University Microprocessor Systems & Interfacing EEE-342Документ8 страницComsats University Microprocessor Systems & Interfacing EEE-342Bilal HabibОценок пока нет
- ADXL335Документ7 страницADXL335ZidNa Munif MuhammadОценок пока нет
- De ManualДокумент56 страницDe ManualBhuvanesh Kakarla AP21110010593Оценок пока нет
- CH341A DatasheetДокумент22 страницыCH341A Datasheetflav100050% (2)
- ADC-DHT11 CДокумент7 страницADC-DHT11 CGiancarloОценок пока нет
- ADXL335 Interfacing With AVRДокумент10 страницADXL335 Interfacing With AVRvikas kumar sahОценок пока нет
- OneWire Ds18b020 Termometre UygulamasımikrocДокумент4 страницыOneWire Ds18b020 Termometre Uygulamasımikrocabdulkadir dönerОценок пока нет
- Kalkulasi DataДокумент1 страницаKalkulasi Datarendi triОценок пока нет
- Document On Interfacing ADC With 8051 MicrocontrollerДокумент5 страницDocument On Interfacing ADC With 8051 MicrocontrollerSrideviKumaresanОценок пока нет
- Esp32 For Iot ApplicationsДокумент35 страницEsp32 For Iot ApplicationsDivyesh DehuryОценок пока нет
- Arduino Adxl335 Accelerometer Interfacing With Arduino UnoДокумент4 страницыArduino Adxl335 Accelerometer Interfacing With Arduino UnoedeОценок пока нет
- Arduino LectureДокумент52 страницыArduino LectureSỹ RonОценок пока нет
- IOT PracticalДокумент10 страницIOT PracticalParmar ManthanОценок пока нет
- Expanding Arduino Pin W - DEMUX IC 4051Документ8 страницExpanding Arduino Pin W - DEMUX IC 4051francoОценок пока нет
- ESP32 DevKit ESP32-WROOM GPIO PinoutДокумент7 страницESP32 DevKit ESP32-WROOM GPIO PinoutOm VermaОценок пока нет
- Fpga Interface For An Analog Input Module: Volume 2, Issue 4, April 2013Документ6 страницFpga Interface For An Analog Input Module: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- C - Tutorial Pages 102 118Документ17 страницC - Tutorial Pages 102 118Christophe DerenneОценок пока нет
- Controler PDFДокумент15 страницControler PDFKhoiril HudaОценок пока нет
- Arduino Programming For ESD: by MD - Dedarul HasanДокумент38 страницArduino Programming For ESD: by MD - Dedarul HasandedarulОценок пока нет
- System Controllers: A Navya Vishnu 1210410304Документ33 страницыSystem Controllers: A Navya Vishnu 1210410304Ananda KrishnaОценок пока нет
- Electronics Writeup FinalДокумент9 страницElectronics Writeup FinalsaibharadwajОценок пока нет
- Unit 5 NotesДокумент25 страницUnit 5 NoteskaustubhОценок пока нет
- Programming With ArduinoДокумент74 страницыProgramming With ArduinoGURSIMRAN SINGHОценок пока нет
- Esd PracticalДокумент37 страницEsd PracticalPurva SukhwalОценок пока нет
- Using Serial Peripheral InterfaceДокумент21 страницаUsing Serial Peripheral InterfaceArton TonoОценок пока нет
- Pic ExampleДокумент5 страницPic ExampleUYeMin HtikeОценок пока нет
- Experiment 20: infrared remote control: 1、Infrared receiving head introductionДокумент8 страницExperiment 20: infrared remote control: 1、Infrared receiving head introductionSahbi Marrouchi100% (1)
- AVR Programming in CДокумент79 страницAVR Programming in Crizwan900100% (1)
- Arduino Lab2Документ89 страницArduino Lab2sarvodayasingh100% (1)
- Atmega328 Features: Atmega48A-48Pa-88A-88Pa-168A-168Pa-328-328P - Datasheet PDFДокумент31 страницаAtmega328 Features: Atmega48A-48Pa-88A-88Pa-168A-168Pa-328-328P - Datasheet PDFIldjohn CarrilloОценок пока нет
- Interfacing With The ISA BusДокумент12 страницInterfacing With The ISA BusseyfiОценок пока нет
- m4 r5 o Level Iot Practical Classes Chapter 4 Diffrent Type of Sensors and ActuatorsДокумент15 страницm4 r5 o Level Iot Practical Classes Chapter 4 Diffrent Type of Sensors and Actuatorspratikshyab685Оценок пока нет
- Arduino LCD Compass ProjectДокумент6 страницArduino LCD Compass ProjectBenjamin Dover100% (1)
- DAC ImplementationДокумент7 страницDAC ImplementationAshok kumarОценок пока нет
- Tech-Tutorials Pic32-Tutorials Pic32mДокумент7 страницTech-Tutorials Pic32-Tutorials Pic32mAlgoОценок пока нет
- Interfacing 7Документ105 страницInterfacing 7anon_720821824Оценок пока нет
- Design Tools Workshop Sensors and Codes For Arduino: P. Syam Sundar Asst. Prof. Dept. of ECE KlefДокумент35 страницDesign Tools Workshop Sensors and Codes For Arduino: P. Syam Sundar Asst. Prof. Dept. of ECE KlefnenaseОценок пока нет
- Programming With Arduino: Course URL: Uggy/homeДокумент74 страницыProgramming With Arduino: Course URL: Uggy/homeAstha AggarwalОценок пока нет
- 5 Sensors Working PrincipleДокумент13 страниц5 Sensors Working Principleankita81123singhОценок пока нет
- Código+ (3) MPU6050Документ3 страницыCódigo+ (3) MPU6050Paulo CezarioОценок пока нет
- Lab 13Документ11 страницLab 13ubaidОценок пока нет
- MANULCCCДокумент5 страницMANULCCCCyber ChatОценок пока нет
- W83787FДокумент123 страницыW83787Fguerrero_rjОценок пока нет
- Exploring Arduino: Tools and Techniques for Engineering WizardryОт EverandExploring Arduino: Tools and Techniques for Engineering WizardryРейтинг: 4.5 из 5 звезд4.5/5 (5)
- 8 PCO Training Invitation Letter December 2018Документ2 страницы8 PCO Training Invitation Letter December 2018sayo goraОценок пока нет
- Geodesic Hub Connectors Domerama PDFДокумент8 страницGeodesic Hub Connectors Domerama PDFmoiseelenaОценок пока нет
- History Desktop PublishingДокумент16 страницHistory Desktop PublishingsanchezromanОценок пока нет
- 58MM Printer Programmer Manual-20161207 PDFДокумент31 страница58MM Printer Programmer Manual-20161207 PDFsatryaОценок пока нет
- ContainerДокумент12 страницContainerlakkekepsuОценок пока нет
- Technical Data: An Innovative & Cutting-Edge Digital Radiography SystemДокумент12 страницTechnical Data: An Innovative & Cutting-Edge Digital Radiography SystemJacques GamelinОценок пока нет
- Auto Chassis NotesДокумент90 страницAuto Chassis Notesanishsukumar000gmailcomОценок пока нет
- Learn PowerShell Core 6.0Документ800 страницLearn PowerShell Core 6.0Felippe Coelho100% (2)
- Pellets Burner 6 00 Manual EnglishДокумент22 страницыPellets Burner 6 00 Manual EnglishTasos KachpanisОценок пока нет
- Spiral Welded Tubes BrochuresДокумент4 страницыSpiral Welded Tubes BrochuresSoumitra GuptaОценок пока нет
- LZQJXC Dab e 3.10Документ2 страницыLZQJXC Dab e 3.10alageshvijayОценок пока нет
- SAP-Document Splitting: GL Account DR CR Profit Center Vendor Pur. 1 Pur. 2 TaxДокумент16 страницSAP-Document Splitting: GL Account DR CR Profit Center Vendor Pur. 1 Pur. 2 Taxharshad jain100% (1)
- Syntel Mock 2Документ18 страницSyntel Mock 2Ashutosh MauryaОценок пока нет
- Commercial Sales Associate FY - 19: Kavyaa KДокумент12 страницCommercial Sales Associate FY - 19: Kavyaa KKavya PradeepОценок пока нет
- Chiller: Asian Paints Khandala PlantДокумент19 страницChiller: Asian Paints Khandala PlantAditiОценок пока нет
- Ijetr022724 PDFДокумент12 страницIjetr022724 PDFerpublicationОценок пока нет
- Ample Sound Basics #1 ArpeggiosДокумент37 страницAmple Sound Basics #1 ArpeggiosWesleyОценок пока нет
- EHB02 Technical Specifications: 1. External DimensionsДокумент5 страницEHB02 Technical Specifications: 1. External DimensionsArmandoCalderonОценок пока нет
- Volvo Ec35D: Parts CatalogДокумент461 страницаVolvo Ec35D: Parts Cataloggiselle100% (1)
- ATB Riva Calzoni Gianluca RaseniДокумент35 страницATB Riva Calzoni Gianluca RaseniDiana QuinteroОценок пока нет
- Century Lookbook CatalogueДокумент162 страницыCentury Lookbook Cataloguefwd2datta50% (2)
- Ansi C37.72-1987 PDFДокумент25 страницAnsi C37.72-1987 PDFIvanОценок пока нет
- The Giza Power PlantДокумент10 страницThe Giza Power Plantinterstar100% (1)
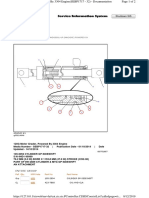
- Shutdown SIS: Motor Grader 120G Motor Grader 4Hd 120G Motor Grader 4HD00001-UP (MACHINE) POWERED BY 3304 EngineДокумент2 страницыShutdown SIS: Motor Grader 120G Motor Grader 4Hd 120G Motor Grader 4HD00001-UP (MACHINE) POWERED BY 3304 EngineStevenОценок пока нет
- Airtag Wallet Keyword Search-2Документ15 страницAirtag Wallet Keyword Search-2Azhar ShakeelОценок пока нет
- Specialty Lubricants Molykote®: 44MA GreaseДокумент2 страницыSpecialty Lubricants Molykote®: 44MA GreasefadhlidzilОценок пока нет
- Blue Lotus Software Development CompanyДокумент3 страницыBlue Lotus Software Development CompanydP gaming0% (1)
- Abc of UccДокумент28 страницAbc of UccCount-Daniel John Fogarty100% (4)
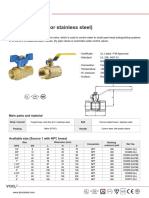
- VC02 Brass Ball Valve Full Port Full BoreДокумент2 страницыVC02 Brass Ball Valve Full Port Full Boremahadeva1Оценок пока нет
- ACI Concrete International Vol 45 No 8 2023Документ76 страницACI Concrete International Vol 45 No 8 2023Cristopher TenorioОценок пока нет