Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Network Protection Automation Guide Areva 1 PDFДокумент500 страницNetwork Protection Automation Guide Areva 1 PDFEmeka N Obikwelu75% (4)
- Project of Consumer BehaviourДокумент28 страницProject of Consumer BehaviourNaveed JuttОценок пока нет
- 4 3 3LeaseLinesignedДокумент42 страницы4 3 3LeaseLinesignedJagat Brahma PatraОценок пока нет
- Nfjpia Mockboard 2011 BLTДокумент12 страницNfjpia Mockboard 2011 BLTVon Wilson AjocОценок пока нет
- Filcar vs. EspinasДокумент2 страницыFilcar vs. EspinasBrian ThunderОценок пока нет
- Centurion Bank of PunjabДокумент7 страницCenturion Bank of Punjabbaggamraasi1234Оценок пока нет
- Good Practice On The Project "Improve The Food Security of Farming Families Affected by Volatile Food Prices" (Nutrition Component) in CambodiaДокумент2 страницыGood Practice On The Project "Improve The Food Security of Farming Families Affected by Volatile Food Prices" (Nutrition Component) in CambodiaADBGADОценок пока нет
- Consolidated Companies ListДокумент31 страницаConsolidated Companies ListSamir OberoiОценок пока нет
- Juegos PPCДокумент8 страницJuegos PPCikro995Оценок пока нет
- Sec 11Документ3 страницыSec 11Vivek JhaОценок пока нет
- Lenovo Security ThinkShield-Solutions-Guide Ebook IDG NA HV DownloadДокумент10 страницLenovo Security ThinkShield-Solutions-Guide Ebook IDG NA HV DownloadManeshОценок пока нет
- MB0048 Operation Research Assignments Feb 11Документ4 страницыMB0048 Operation Research Assignments Feb 11Arvind KОценок пока нет
- Lucero Flores Resume 2Документ2 страницыLucero Flores Resume 2api-260292914Оценок пока нет
- Compose Testing CheatsheetДокумент1 страницаCompose Testing CheatsheetEstampados SIn ApellidoОценок пока нет
- Peace Corps Guatemala Welcome Book - June 2009Документ42 страницыPeace Corps Guatemala Welcome Book - June 2009Accessible Journal Media: Peace Corps DocumentsОценок пока нет
- Lab ManualДокумент15 страницLab ManualsamyukthabaswaОценок пока нет
- Work Order TemplateДокумент2 страницыWork Order TemplateRed DragonОценок пока нет
- Splunk Certification: Certification Exam Study GuideДокумент18 страницSplunk Certification: Certification Exam Study GuidesalemselvaОценок пока нет
- Guest AccountingДокумент8 страницGuest Accountingjhen01gongonОценок пока нет
- VOID BEQUESTS - AssignmentДокумент49 страницVOID BEQUESTS - AssignmentAkshay GaykarОценок пока нет
- Lesson For SpreadsheetsДокумент69 страницLesson For SpreadsheetsCrisna Rivera PundanoОценок пока нет
- People/Occupancy Rules of Thumb: Bell - Ch10.indd 93 8/17/07 10:39:31 AMДокумент8 страницPeople/Occupancy Rules of Thumb: Bell - Ch10.indd 93 8/17/07 10:39:31 AMPola OsamaОценок пока нет
- Accomplishment Report Dictrict Preventive MaintenanceДокумент2 страницыAccomplishment Report Dictrict Preventive MaintenanceZenia CapalacОценок пока нет
- Goat Farm ProjectДокумент44 страницыGoat Farm ProjectVipin Kushwaha83% (6)
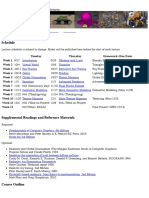
- CS 148 - Introduction To Computer Graphics and ImagingДокумент3 страницыCS 148 - Introduction To Computer Graphics and ImagingMurtaza TajОценок пока нет
- PETRO TCS Engineering Manual 682Документ44 страницыPETRO TCS Engineering Manual 682paulm3565Оценок пока нет
- Java ProgramsДокумент36 страницJava ProgramsPrashanth MohanОценок пока нет
- Section 12-22, Art. 3, 1987 Philippine ConstitutionДокумент3 страницыSection 12-22, Art. 3, 1987 Philippine ConstitutionKaren LabogОценок пока нет
- CE 441 Foundation Engineering 05 07 2019Документ216 страницCE 441 Foundation Engineering 05 07 2019Md. Azizul Hakim100% (1)
- Psad - 2Документ25 страницPsad - 2Mary Ann Toni N. RasonabeОценок пока нет