Вам также может понравиться
- Training 6 WG-210 3. Auflage PDFДокумент84 страницыTraining 6 WG-210 3. Auflage PDFSahba Kiyanoush91% (11)
- SERVOMEX - 2223 TransmitterДокумент4 страницыSERVOMEX - 2223 TransmitterdixaxaОценок пока нет
- Nicolas Minorsky and The Automatic Steering of Ships - S. BennettДокумент6 страницNicolas Minorsky and The Automatic Steering of Ships - S. BennettHackhyОценок пока нет
- Automatic Conveyor For Industrial AutomationДокумент3 страницыAutomatic Conveyor For Industrial AutomationSoni BhattaОценок пока нет
- Battery Maintenance Guide For DJI Enterprise DronesДокумент10 страницBattery Maintenance Guide For DJI Enterprise DronesChristiaan De Ridder100% (1)
- Assignment 1 - NTK PDFДокумент2 страницыAssignment 1 - NTK PDFnigus hailuОценок пока нет
- Pressure Sensor ExperimentДокумент10 страницPressure Sensor Experimentaremutom1932Оценок пока нет
- Bridgewater HallДокумент4 страницыBridgewater HallHuzaifa J AhmedabadwalaОценок пока нет
- ProCash 2150xe PDFДокумент2 страницыProCash 2150xe PDFemrouz67% (3)
- Repair Autocom CDP VCIДокумент5 страницRepair Autocom CDP VCIAdi Catanescu100% (2)
- Automatic Night Lamp Using LDRДокумент3 страницыAutomatic Night Lamp Using LDRMuhammad Haziq100% (2)
- 4 PLCДокумент31 страница4 PLCThakur Dhananjay PratapОценок пока нет
- 50+ Instrumentation Interview Questions: #1 January 10, 2020, 4:10pmДокумент14 страниц50+ Instrumentation Interview Questions: #1 January 10, 2020, 4:10pmkrishna kumarОценок пока нет
- 1-Which of The Following Is Not Covered Under Mechanical Energy Domain?Документ6 страниц1-Which of The Following Is Not Covered Under Mechanical Energy Domain?pradnya sadigaleОценок пока нет
- Close Loop Control Sys IntroДокумент7 страницClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopОценок пока нет
- Temperature Controlled DC FanДокумент5 страницTemperature Controlled DC FanMuhammad MansoorОценок пока нет
- Ee342 - Pid Controllers - 2020Документ42 страницыEe342 - Pid Controllers - 2020ShadrackОценок пока нет
- Measurement and Instrumentation Multiple Choice Questions and Answers Preparation For Competition Exams PDF - Preparation For EngineeringДокумент14 страницMeasurement and Instrumentation Multiple Choice Questions and Answers Preparation For Competition Exams PDF - Preparation For EngineeringMahesh sОценок пока нет
- VRV System of Air ConditionДокумент15 страницVRV System of Air ConditionRushabh Rajendra YerunkarОценок пока нет
- Ee 328 Lecture 1Документ40 страницEe 328 Lecture 1Hasan Hatice IlcalıОценок пока нет
- Question Bank of Industrial Automation RevДокумент1 страницаQuestion Bank of Industrial Automation RevPatel NeelОценок пока нет
- DPT Smart Pressure TransmitterДокумент15 страницDPT Smart Pressure Transmitterprasanta_bbsrОценок пока нет
- TH1 Temperature Measurement and Calibration - Issue 3Документ4 страницыTH1 Temperature Measurement and Calibration - Issue 3qwert 12345Оценок пока нет
- Transducer AssignmentДокумент5 страницTransducer AssignmentdagemОценок пока нет
- Me2401 Mechatronics - 2 Marks With Answer PDFДокумент15 страницMe2401 Mechatronics - 2 Marks With Answer PDFSiva RamanОценок пока нет
- Firing Pulse GenerationДокумент23 страницыFiring Pulse GenerationEsai Vanan100% (2)
- Introduction To The Key Terms Associated With PID Temperature ControlДокумент8 страницIntroduction To The Key Terms Associated With PID Temperature ControlBộ Môn DieuKhienhoc100% (1)
- Lect 1a Introduction To Electronic InstrumentationДокумент38 страницLect 1a Introduction To Electronic InstrumentationEzzadin AbdowahabОценок пока нет
- Computer Process ControlДокумент10 страницComputer Process Controlvirus101Оценок пока нет
- Two Marks Questions & AnswersДокумент24 страницыTwo Marks Questions & Answerssaranya rОценок пока нет
- Process Control 2Документ23 страницыProcess Control 2jeed100% (1)
- Electrical InstrumentationДокумент12 страницElectrical Instrumentationबृजभूषणशर्माОценок пока нет
- Digimon TFT Console English Rev1Документ16 страницDigimon TFT Console English Rev1Dario Fernando Flores CottoОценок пока нет
- TC 513Документ25 страницTC 513MuthuRaj TcsОценок пока нет
- PID Controller Working Principle Explained For BeginnersДокумент6 страницPID Controller Working Principle Explained For BeginnersPramillaОценок пока нет
- Uninterruptible Power Supply (UPS)Документ15 страницUninterruptible Power Supply (UPS)Aviral OjhaОценок пока нет
- Introduction To InstrumentationДокумент126 страницIntroduction To InstrumentationbelaynehОценок пока нет
- Introduction To Power Electronics (Benny Yeung)Документ9 страницIntroduction To Power Electronics (Benny Yeung)Souvik GanguliОценок пока нет
- PID ControlДокумент22 страницыPID ControlJessica RossОценок пока нет
- Mechatronics Lab ManualДокумент55 страницMechatronics Lab ManualSoumi Bandyopadhyay SB100% (1)
- 9 Intelligent InstrumentsДокумент45 страниц9 Intelligent InstrumentsAli Ahmad100% (1)
- Electrical FileДокумент52 страницыElectrical FilebabuОценок пока нет
- Water Level ControllerДокумент3 страницыWater Level ControllerHarshavardhan PatilОценок пока нет
- Diaphragm Seal Filling GuideДокумент14 страницDiaphragm Seal Filling GuideKrishnaraj DhavalaОценок пока нет
- Actuator Sensor Interface System in Industrial Control SystemsДокумент85 страницActuator Sensor Interface System in Industrial Control SystemsMohamed Homosany100% (1)
- Advantages of PLC Used in System Over Relay SystemsДокумент1 страницаAdvantages of PLC Used in System Over Relay Systemssiva kumar100% (1)
- PLC Lab Manual PDFДокумент74 страницыPLC Lab Manual PDFNp Crush9Оценок пока нет
- InstrumentationДокумент61 страницаInstrumentationHarish YОценок пока нет
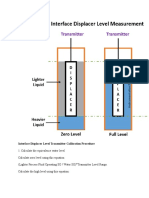
- Interface Displacer Level Transmitter Calibration ProcedureДокумент3 страницыInterface Displacer Level Transmitter Calibration ProcedureAs'adi MozartОценок пока нет
- Distributed Control SystemДокумент31 страницаDistributed Control SystemAbdullah BarkaОценок пока нет
- Lab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveДокумент10 страницLab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveAsad saeedОценок пока нет
- Principles of Digital Instruments PDFДокумент10 страницPrinciples of Digital Instruments PDFÖmKârGhorpadeОценок пока нет
- Lecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Документ61 страницаLecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Rama KrishnaОценок пока нет
- Unit 54 Electronic Measurement and TestingДокумент12 страницUnit 54 Electronic Measurement and TestingYuvarajaОценок пока нет
- Sect 6 Priority Panel (K01-11-036) ManualДокумент68 страницSect 6 Priority Panel (K01-11-036) ManualJose Luis Jimenez InfanteОценок пока нет
- RTD Temperature Measurement 917AДокумент16 страницRTD Temperature Measurement 917Amitha07Оценок пока нет
- Process Control FundamentalsДокумент22 страницыProcess Control FundamentalsJude HarrisonОценок пока нет
- DLC3000 Instruction ManualДокумент106 страницDLC3000 Instruction Manualemap38Оценок пока нет
- Control SystemДокумент55 страницControl SystemEr Rajdeep SahaОценок пока нет
- Chapter 3 - Continuously Process ControlДокумент84 страницыChapter 3 - Continuously Process ControlVon Jin100% (1)
- Calibration of The Temperature IndicatorДокумент5 страницCalibration of The Temperature IndicatorMourougapragash SubramanianОценок пока нет
- PID Controller - Wikipedia, The Free EncyclopediaДокумент18 страницPID Controller - Wikipedia, The Free EncyclopediaWan MKОценок пока нет
- PID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PДокумент16 страницPID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PshaheerdurraniОценок пока нет
- PID ControllerДокумент17 страницPID Controlleradetag0% (1)
- PID ControllerДокумент18 страницPID ControllerCheng Khie Chieh100% (1)
- Workshop Manual SE5000Документ75 страницWorkshop Manual SE5000Florian PjetriОценок пока нет
- Diagnostic Trouble Codes and Suggested Actions: Description DTC Stored (Y/N) Remarks Suggested ActionДокумент1 страницаDiagnostic Trouble Codes and Suggested Actions: Description DTC Stored (Y/N) Remarks Suggested ActionFlorian PjetriОценок пока нет
- Manual HeliosinstallationДокумент42 страницыManual HeliosinstallationFlorian PjetriОценок пока нет
- Ziegler NicholsДокумент4 страницыZiegler NicholsYip YipОценок пока нет
- Modelling of LQR Control With Matlab: 1 Model of The Mechanical SystemДокумент7 страницModelling of LQR Control With Matlab: 1 Model of The Mechanical SystemMelina MaydОценок пока нет
- 19Документ42 страницы19Bhavya SainiОценок пока нет
- Electronic Card-Lock SystemДокумент2 страницыElectronic Card-Lock SystemVikash KumarОценок пока нет
- Linear Quadratic RegulatorДокумент4 страницыLinear Quadratic RegulatorFlorian PjetriОценок пока нет
- 132 - Telephone Call Meter Using Calculator and COBДокумент2 страницы132 - Telephone Call Meter Using Calculator and COBFlorian PjetriОценок пока нет
- 93 Fire AlarmДокумент1 страница93 Fire AlarmFlorian PjetriОценок пока нет
- 93 Fire AlarmДокумент1 страница93 Fire AlarmFlorian PjetriОценок пока нет
- Selection Guide Fluid Coupling NewДокумент34 страницыSelection Guide Fluid Coupling NewIsaac Montero Barrera100% (1)
- PC 3000 Product CatalogueДокумент30 страницPC 3000 Product CatalogueThe1LegendОценок пока нет
- Sepeaker Aktif POLYTRON PAS 67 - 68Документ3 страницыSepeaker Aktif POLYTRON PAS 67 - 68Waton Rinekso0% (1)
- DK1913 CH08Документ22 страницыDK1913 CH08Maniraj PerumalОценок пока нет
- Whirlpool ADG6550 IxДокумент17 страницWhirlpool ADG6550 Ixairwolf4226100% (1)
- M5MДокумент30 страницM5MAlfie xyzОценок пока нет
- Opa 1677Документ51 страницаOpa 1677Swarnim man DangolОценок пока нет
- MOSFET Course Notes - MMA HAKIMДокумент22 страницыMOSFET Course Notes - MMA HAKIMAdnan HossainОценок пока нет
- 02.07 Ecas Can Diagnoza (GB)Документ22 страницы02.07 Ecas Can Diagnoza (GB)dzadza2Оценок пока нет
- Load Cells Ideas and TipsДокумент15 страницLoad Cells Ideas and Tipsestebanshadow1Оценок пока нет
- Small Welder For Joining Nichrome and Nickel WiresДокумент7 страницSmall Welder For Joining Nichrome and Nickel WiresJulio_Cesar1981Оценок пока нет
- Smart MaterialsДокумент1 страницаSmart MaterialsThejas GowdaОценок пока нет
- Vacuum Circuit Breaker CatalogueДокумент11 страницVacuum Circuit Breaker Cataloguedabs_orangejuice0% (1)
- Philips Solar Indoor Lighting System Eco - 20140730Документ2 страницыPhilips Solar Indoor Lighting System Eco - 20140730Muslimin PutraОценок пока нет
- Unit 2 Physics New SyllabusДокумент14 страницUnit 2 Physics New SyllabusKasshaf AhmadОценок пока нет
- Elcosmo: Toshiba ElevatorsДокумент19 страницElcosmo: Toshiba ElevatorsAbdul HalimОценок пока нет
- RFSoC Evaluation Tool User GuideДокумент71 страницаRFSoC Evaluation Tool User GuideBismillah Nasir IshfaqОценок пока нет
- Bl6 ManualДокумент175 страницBl6 ManualDelipsy HdzОценок пока нет
- Describing System Output of Implantable Middle Ear Hearing DevicesДокумент6 страницDescribing System Output of Implantable Middle Ear Hearing DevicesAhmad Zubair RasulyОценок пока нет
- Instruction Manual: Voltage Regulator Model: APR 125-5 Part Number: 9 1688 00 100Документ22 страницыInstruction Manual: Voltage Regulator Model: APR 125-5 Part Number: 9 1688 00 100Guilherme ChiminelliОценок пока нет
- Chapter # 20 Nuclear RadiationДокумент6 страницChapter # 20 Nuclear RadiationSIR USMAN KHANОценок пока нет
- CA7 Command ListsДокумент6 страницCA7 Command ListsSamay100% (2)
- Digital Sentry DSSRV2 Network Video Recorder: Product SpecificationДокумент4 страницыDigital Sentry DSSRV2 Network Video Recorder: Product SpecificationSakerhetsОценок пока нет
- Chapter 6 - FET Biasing: Your Answer: Correct AnswerДокумент6 страницChapter 6 - FET Biasing: Your Answer: Correct AnswerXiao XiОценок пока нет
- ManualДокумент56 страницManual- Y.D.V-Оценок пока нет