Вам также может понравиться
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОт EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОценок пока нет
- Basic Concepts: 1.1 ContinuityДокумент7 страницBasic Concepts: 1.1 ContinuitywelcometoankitОценок пока нет
- 1 Basic Facts About The Gamma FunctionДокумент7 страниц1 Basic Facts About The Gamma FunctionNurdin HadihawrunОценок пока нет
- Convex Analysis and Optimization Solution ManualДокумент193 страницыConvex Analysis and Optimization Solution ManualReza Alizadeh100% (2)
- Detailed Solutions A-07 JUNE 2003: I X X F F IДокумент32 страницыDetailed Solutions A-07 JUNE 2003: I X X F F IAdzLinkBalaoangОценок пока нет
- 10 01 Errors Approximations PDFДокумент8 страниц10 01 Errors Approximations PDFSri DОценок пока нет
- Hw3sol PDFДокумент8 страницHw3sol PDFShy PeachDОценок пока нет
- Application of DerivativesДокумент26 страницApplication of DerivativessudersanaviswanathanОценок пока нет
- MRRW Bound and Isoperimetric Problems: 6.1 PreliminariesДокумент8 страницMRRW Bound and Isoperimetric Problems: 6.1 PreliminariesAshoka VanjareОценок пока нет
- Gamma PDFДокумент7 страницGamma PDFManjul RegmiОценок пока нет
- The Fundamental Theorem of CalculusДокумент5 страницThe Fundamental Theorem of CalculusDaiszyBarakaОценок пока нет
- SKMM 3023 Additional Notes - Error PropagationДокумент6 страницSKMM 3023 Additional Notes - Error PropagationYvonne Zakharov RosenblumОценок пока нет
- The Method of Lagrange MultipliersДокумент5 страницThe Method of Lagrange MultipliersSaurabh TomarОценок пока нет
- An Algorithm For Computing Risk Parity Weights - F. SpinuДокумент6 страницAn Algorithm For Computing Risk Parity Weights - F. SpinucastjamОценок пока нет
- Lec4 Gradient Method ReviseДокумент33 страницыLec4 Gradient Method ReviseJose Lorenzo TrujilloОценок пока нет
- Coding Theory Linear Cyclic Codes: 0 1 N 1 N 1 N NДокумент19 страницCoding Theory Linear Cyclic Codes: 0 1 N 1 N 1 N NvijaykannamallaОценок пока нет
- Lévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Документ17 страницLévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dony HidayatОценок пока нет
- DifferentiationДокумент30 страницDifferentiationPranjal Sharma100% (1)
- Ch-6 (Applications of Derivatives) PDFДокумент26 страницCh-6 (Applications of Derivatives) PDFVaibhav TomarОценок пока нет
- Tutorial 1 Fundamentals: Review of Derivatives, Gradients and HessiansДокумент25 страницTutorial 1 Fundamentals: Review of Derivatives, Gradients and Hessiansrashed44Оценок пока нет
- Lec4 Quad FormДокумент18 страницLec4 Quad FormSudheerKumarОценок пока нет
- On the difference π (x) − li (x) : Christine LeeДокумент41 страницаOn the difference π (x) − li (x) : Christine LeeKhokon GayenОценок пока нет
- Improper Integral1Документ25 страницImproper Integral1Lev DunОценок пока нет
- 13 Generalized Programming and Subgradient Optimization PDFДокумент20 страниц13 Generalized Programming and Subgradient Optimization PDFAbrar HashmiОценок пока нет
- m820 Sol 2011Документ234 страницыm820 Sol 2011Tom DavisОценок пока нет
- Continuous FunctionsДокумент19 страницContinuous Functionsap021Оценок пока нет
- Optimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsДокумент10 страницOptimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsmaryОценок пока нет
- Chapter 4 NLO PDFДокумент34 страницыChapter 4 NLO PDFYotamОценок пока нет
- Matrix Calculus: 1 The DerivativeДокумент13 страницMatrix Calculus: 1 The Derivativef270784100% (1)
- λ ax ∂ h hx ∂ α (log α) x ∂Документ2 страницыλ ax ∂ h hx ∂ α (log α) x ∂JFSPОценок пока нет
- Chapter 1 - Applied Analysis Homework SolutionsДокумент11 страницChapter 1 - Applied Analysis Homework SolutionsJoe100% (4)
- Strogatz - ch2 (Nonlinier Physics)Документ9 страницStrogatz - ch2 (Nonlinier Physics)Rahmat WidodoОценок пока нет
- Calculus 2, Test 1 ReviewДокумент3 страницыCalculus 2, Test 1 ReviewErza_AmmyОценок пока нет
- Math 221 Solution To ProblemsДокумент16 страницMath 221 Solution To ProblemsRyan Kristoffer NuñezОценок пока нет
- Lecture 17Документ2 страницыLecture 17Tấn Long LêОценок пока нет
- Math AppДокумент7 страницMath Appg3dizeОценок пока нет
- Improper IntegralДокумент23 страницыImproper IntegralPblock Saher100% (1)
- Practice Quiz 2: Daniel Seleznev March 2014Документ4 страницыPractice Quiz 2: Daniel Seleznev March 2014George TreacyОценок пока нет
- 4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MДокумент10 страниц4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MverbicarОценок пока нет
- HW 2 SolДокумент9 страницHW 2 SolVighnesh S BhatОценок пока нет
- Rolle's Theorem, Mean Value Theorem, L'Hosital's RuleДокумент13 страницRolle's Theorem, Mean Value Theorem, L'Hosital's RuleErnie Navarrete IdosoraОценок пока нет
- VelsДокумент7 страницVelssuleimanОценок пока нет
- Calc 2 SpringstudyguideДокумент5 страницCalc 2 SpringstudyguideDefault AccountОценок пока нет
- Calculus 141, Section 8.6 The Trapezoidal Rule & Simpson's RuleДокумент4 страницыCalculus 141, Section 8.6 The Trapezoidal Rule & Simpson's RuleChathuranga ManukulaОценок пока нет
- STAT 231 Homework 5 SolutionsДокумент8 страницSTAT 231 Homework 5 SolutionsPaarsa KhanОценок пока нет
- From Brownian Motion To Euclidean Fields: 1 The Gaussian Kernel of The Diffusion EquationДокумент5 страницFrom Brownian Motion To Euclidean Fields: 1 The Gaussian Kernel of The Diffusion EquationSrivatsan BalakrishnanОценок пока нет
- Chapter 5E-CRV - W0 PDFДокумент31 страницаChapter 5E-CRV - W0 PDFaltwirqiОценок пока нет
- Calculus Review and Formulas: 1 FunctionsДокумент11 страницCalculus Review and Formulas: 1 FunctionsRaymond BalladОценок пока нет
- Quest HW1 SolutionsДокумент6 страницQuest HW1 Solutionsellie<3Оценок пока нет
- Non Linear Programming ProblemsДокумент66 страницNon Linear Programming Problemsbits_who_am_iОценок пока нет
- Math 5310, Homework #5: Problem 1Документ11 страницMath 5310, Homework #5: Problem 1rashslashОценок пока нет
- 1.8. Large Deviation and Some Exponential Inequalities.: B R e DX Essinf G (X), T e DX Esssup G (X)Документ4 страницы1.8. Large Deviation and Some Exponential Inequalities.: B R e DX Essinf G (X), T e DX Esssup G (X)Naveen Kumar SinghОценок пока нет
- Roots of Equations: Numerical Methods For Civil EngineersДокумент21 страницаRoots of Equations: Numerical Methods For Civil EngineersRibesha MushОценок пока нет
- Quadratic Mean Differentiability ExampleДокумент5 страницQuadratic Mean Differentiability ExamplemamurtazaОценок пока нет
- 316s Answer10 PDFДокумент3 страницы316s Answer10 PDFjisteeleОценок пока нет
- Math 105 Practice Exam 3 SolutionsДокумент3 страницыMath 105 Practice Exam 3 SolutionsexamkillerОценок пока нет
- Mathematics For Microeconomics: 6y y U, 8x X UДокумент8 страницMathematics For Microeconomics: 6y y U, 8x X UAsia ButtОценок пока нет
- Integration TechniquesДокумент18 страницIntegration Techniquesஏம்மனுஎல்லெ செலேச்டினோОценок пока нет
- Calculus Reference (SparkCharts)Документ2 страницыCalculus Reference (SparkCharts)www_webb100% (1)
- ArchivedДокумент295 страницArchivedশেখ ফয়সাল কবিরОценок пока нет
- JFFKKKДокумент13 страницJFFKKKশেখ ফয়সাল কবিরОценок пока нет
- Intermediate Chemistry 1st Paper by Hazari and Nag PDFДокумент717 страницIntermediate Chemistry 1st Paper by Hazari and Nag PDFVivek Khan80% (5)
- Doctors of NDC 05 Batch ResponsesДокумент1 страницаDoctors of NDC 05 Batch Responsesশেখ ফয়সাল কবিরОценок пока нет
- CH 11 Shape Factors in Materials SelectionДокумент5 страницCH 11 Shape Factors in Materials SelectionKristi GonzalesОценок пока нет
- HMMДокумент128 страницHMMশেখ ফয়সাল কবিরОценок пока нет
- Kalman Filter - Implimention in Mathlab PDFДокумент0 страницKalman Filter - Implimention in Mathlab PDFLê Tuấn MinhОценок пока нет
- Model Evaluation MethodsДокумент3 страницыModel Evaluation MethodsNurlianti DahliarОценок пока нет
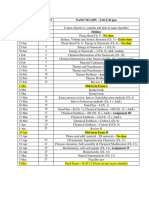
- Nano 703 Spring 2017 Tentative ScheduleДокумент1 страницаNano 703 Spring 2017 Tentative Scheduleশেখ ফয়সাল কবিরОценок пока нет
- Chapter 5 Finite Difference Methods: Math6911 S08, HM ZhuДокумент90 страницChapter 5 Finite Difference Methods: Math6911 S08, HM ZhuGinanjar DikaОценок пока нет
- Mod FlowДокумент67 страницMod FlowIngo WottrichОценок пока нет
- ICCCBE08 - 157 - A Framework For Evaluating Deep Excavation AlternativesДокумент6 страницICCCBE08 - 157 - A Framework For Evaluating Deep Excavation Alternativesশেখ ফয়সাল কবিরОценок пока нет
- Optimal Estimation of 2D Contaminat TransportДокумент7 страницOptimal Estimation of 2D Contaminat Transportশেখ ফয়সাল কবিরОценок пока нет
- Finite Difference MethodДокумент20 страницFinite Difference MethodPetrucio José Dos Santos JuniorОценок пока нет
- Information Sheet: Home AddressДокумент3 страницыInformation Sheet: Home Addressশেখ ফয়সাল কবিরОценок пока нет
- Data Assimilation With The Weighted Ensemble Kalman FilterДокумент25 страницData Assimilation With The Weighted Ensemble Kalman Filterশেখ ফয়সাল কবিরОценок пока нет
- 2D Zou and ParrДокумент7 страниц2D Zou and Parrশেখ ফয়সাল কবিরОценок пока нет
- Japan-IMF Scholarship 4 Asian StudentsДокумент44 страницыJapan-IMF Scholarship 4 Asian StudentsThowhidul IslamОценок пока нет
- Introduction To Asymptotic AnalysisДокумент32 страницыIntroduction To Asymptotic AnalysisSagor AhmedОценок пока нет
- Sas/Or 14.3 User's Guide: The Nonlinear Programming SolverДокумент63 страницыSas/Or 14.3 User's Guide: The Nonlinear Programming SolverSiraj BusseОценок пока нет
- Ma-Mscmt-10 J16Документ5 страницMa-Mscmt-10 J16Dilip BhatiОценок пока нет
- NEURAL NETWORKS Basics Using MatlabДокумент51 страницаNEURAL NETWORKS Basics Using Matlabsreemd100% (2)
- Cavity Lid DriveДокумент4 страницыCavity Lid DrivealexОценок пока нет
- Answer-Sheet GEN MATHДокумент5 страницAnswer-Sheet GEN MATHJoesil Dianne SempronОценок пока нет
- NFA To DFA ConversionДокумент10 страницNFA To DFA ConversionKhushbul AlamОценок пока нет
- Assignment 2 PDFДокумент2 страницыAssignment 2 PDFranjana senguptaОценок пока нет
- Assignment 1Документ4 страницыAssignment 1Bhavik BohraОценок пока нет
- CST201 M1 Ktunotes - inДокумент72 страницыCST201 M1 Ktunotes - inSHAHEEM TKОценок пока нет
- Lecture Notes Interpolation and Data FittingДокумент16 страницLecture Notes Interpolation and Data FittingAmbreen KhanОценок пока нет
- Result 2 NDДокумент1 страницаResult 2 NDAmanОценок пока нет
- Time-Dependent MethodsДокумент12 страницTime-Dependent MethodsmanrezaОценок пока нет
- Tutorial Premidsem MA214UPDATEDДокумент13 страницTutorial Premidsem MA214UPDATEDsxdcfvgОценок пока нет
- Lecture 06-20220813Документ9 страницLecture 06-20220813Kundan karnОценок пока нет
- ANM Formulae - GSKДокумент6 страницANM Formulae - GSKPavan KundekarОценок пока нет
- Calculus 1-5: Radianta Triatmadja Intan SuprabaДокумент35 страницCalculus 1-5: Radianta Triatmadja Intan SuprabaAkilaОценок пока нет
- Neuronalenetze en Zeta2 2col DkrieselcomДокумент6 страницNeuronalenetze en Zeta2 2col DkrieselcomIsabel Simón GuerreroОценок пока нет
- Beales MethodДокумент38 страницBeales MethodAbani100% (3)
- ANN - Ch2-Adaline and MadalineДокумент29 страницANN - Ch2-Adaline and MadalineMuhanad Al-khalisy100% (1)
- The Travelling Salesman ProblemДокумент35 страницThe Travelling Salesman ProblemNarendra Singh PatelОценок пока нет
- Gauss Elimination MatlabДокумент14 страницGauss Elimination MatlabMuhamad HafizОценок пока нет
- Exercise - Types of Algebraic ExpressionsДокумент4 страницыExercise - Types of Algebraic ExpressionsNarayanamurthy AmirapuОценок пока нет
- Linear Programming Optimization MethodДокумент20 страницLinear Programming Optimization MethodClutch GuruОценок пока нет
- Dual Simplex Method & Sensitivity AnalysisДокумент8 страницDual Simplex Method & Sensitivity AnalysisSubir ChakrabartyОценок пока нет
- Solution Quiz II 1Документ2 страницыSolution Quiz II 1Aayush ChauhanОценок пока нет
- A Recipe For Training Neural NetworksДокумент15 страницA Recipe For Training Neural NetworksChoukha Ram (cRc)Оценок пока нет
- Daa Syllabus 2021Документ2 страницыDaa Syllabus 2021Sagar LabadeОценок пока нет
- Small StepsДокумент7 страницSmall Steps张宇Оценок пока нет
- Digtal Signal Processing AECB23: Institute of Aeronautical Engineering CollegeДокумент15 страницDigtal Signal Processing AECB23: Institute of Aeronautical Engineering CollegeBairam Ravi KumarОценок пока нет