Вам также может понравиться
- Statistical Mechanics - Pathria Homework 6Документ4 страницыStatistical Mechanics - Pathria Homework 6Ale Gomez100% (1)
- Solutions 1204Документ2 страницыSolutions 1204free_progОценок пока нет
- C Mechanics 11 PDFДокумент4 страницыC Mechanics 11 PDFraool-zeemanОценок пока нет
- Jackson 9.10, 9.16Документ13 страницJackson 9.10, 9.16razarizvi1Оценок пока нет
- List of Formulae in StatisticsДокумент3 страницыList of Formulae in Statisticssawantdt100% (1)
- תקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסДокумент40 страницתקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסRonОценок пока нет
- Quantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Документ7 страницQuantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Ale GomezОценок пока нет
- Mean Value of A Smarandache-Type FunctionДокумент4 страницыMean Value of A Smarandache-Type FunctionMia AmaliaОценок пока нет
- Form Mec t3Документ2 страницыForm Mec t3Henry De AriesОценок пока нет
- Legendre PolynomialsДокумент6 страницLegendre PolynomialsFrancis Jr CastroОценок пока нет
- Ee132b Hw2 SolДокумент5 страницEe132b Hw2 SolAhmed HassanОценок пока нет
- Mathematical Physics and Classical Mechanics Unit 1 PPT DR. RAJESH MATHPALДокумент52 страницыMathematical Physics and Classical Mechanics Unit 1 PPT DR. RAJESH MATHPALHimanshu ShekharОценок пока нет
- Formula CardДокумент13 страницFormula CardDasaraaaОценок пока нет
- Unit Ii Asymmetric CiphersДокумент19 страницUnit Ii Asymmetric Ciphersmohammed adhilОценок пока нет
- Solutions To Selected Problems-Duda, HartДокумент12 страницSolutions To Selected Problems-Duda, HartTiep VuHuu67% (3)
- Jackson2 17Документ3 страницыJackson2 17إيوان ملكيОценок пока нет
- Chapter 01Документ20 страницChapter 01Engr Kamran JavedОценок пока нет
- Gerretsen InequalityДокумент6 страницGerretsen InequalityMoti LevyОценок пока нет
- Polar CoordinatesДокумент22 страницыPolar CoordinatesSyed Kamran HaiderОценок пока нет
- Hilbert Pachpatte InequalitiesДокумент28 страницHilbert Pachpatte InequalitiesAlvaro CorvalanОценок пока нет
- MTH6141 Random Processes, Spring 2012 Solutions To Exercise Sheet 5Документ2 страницыMTH6141 Random Processes, Spring 2012 Solutions To Exercise Sheet 5aset999Оценок пока нет
- TakeHome Exam2 PDFДокумент6 страницTakeHome Exam2 PDFRedmond R. ShamshiriОценок пока нет
- Merton Jump - Diffusion.modelДокумент7 страницMerton Jump - Diffusion.modelIoannis MilasОценок пока нет
- The Carleman'S Inequality For Negative Power Number: Nguyen Thanh Long, Nguyen Vu Duy LinhДокумент7 страницThe Carleman'S Inequality For Negative Power Number: Nguyen Thanh Long, Nguyen Vu Duy Linhduylinh65Оценок пока нет
- QT Formulae ONLYДокумент4 страницыQT Formulae ONLYSudhir PawarОценок пока нет
- Digital Communications I: Modulation and Coding Course: Spring - 2013 Jeffrey N. DenenbergДокумент25 страницDigital Communications I: Modulation and Coding Course: Spring - 2013 Jeffrey N. DenenbergWaqar AsmatОценок пока нет
- Seminar in Large Deviations and ApplicationsДокумент14 страницSeminar in Large Deviations and ApplicationsDomenique SchwestermannОценок пока нет
- Quantum Physics III (8.06) Spring 2008 Solution Set 10: ψ (x) = (k/a + i tanh (ax) ) eДокумент7 страницQuantum Physics III (8.06) Spring 2008 Solution Set 10: ψ (x) = (k/a + i tanh (ax) ) epac_man2Оценок пока нет
- Multinomial TheoremДокумент11 страницMultinomial TheoremJohn TranОценок пока нет
- Cumulative Function N Dimensional Gaussians 12.2013Документ8 страницCumulative Function N Dimensional Gaussians 12.2013msayalaОценок пока нет
- MR 4 2019 Best Polynomial Estimates in A TriangleДокумент5 страницMR 4 2019 Best Polynomial Estimates in A TriangleMuhammad TaufanОценок пока нет
- Lect 6Документ34 страницыLect 6Minh ThiệuОценок пока нет
- Eqworld: 34. + (A - 2Q Cos 2X) Y 0Документ2 страницыEqworld: 34. + (A - 2Q Cos 2X) Y 0sijyvinodОценок пока нет
- Reed-Muller Codes: 8911635 Lee, Yelin 8911613 Hou, Xin-Anne National Chiao Tung UniversityДокумент17 страницReed-Muller Codes: 8911635 Lee, Yelin 8911613 Hou, Xin-Anne National Chiao Tung Universityacidburn200Оценок пока нет
- Lecture 8Документ21 страницаLecture 8sreeОценок пока нет
- QED Vertex CorrectionДокумент19 страницQED Vertex CorrectionMehmet HelvaОценок пока нет
- Lec8 Optimum ReceiverДокумент36 страницLec8 Optimum ReceiverIbra NazlaОценок пока нет
- Basics Solutions ParametrizationДокумент4 страницыBasics Solutions Parametrizationrodrigo_trentiniОценок пока нет
- DRM SolutionsДокумент116 страницDRM SolutionsCésar TapiaОценок пока нет
- Lecture 1 (Guide Through Spreadsheet)Документ3 страницыLecture 1 (Guide Through Spreadsheet)Дмитрий КолесниковОценок пока нет
- 1 Coherent and Incoherent Modulation in OFDM: 1.1 Review of Differential ModulationДокумент15 страниц1 Coherent and Incoherent Modulation in OFDM: 1.1 Review of Differential ModulationRajib MukherjeeОценок пока нет
- I Alpha 20-2-2013 Ketaksamaan Tipe LemahДокумент11 страницI Alpha 20-2-2013 Ketaksamaan Tipe LemahNaoko Hana RitzukiОценок пока нет
- Intro To Stats Formula SheetДокумент2 страницыIntro To Stats Formula SheetKathlynGraceОценок пока нет
- Foca 3Документ11 страницFoca 3jsvarnikachhaviОценок пока нет
- Curve Alignment Known CorrespondencesДокумент3 страницыCurve Alignment Known CorrespondencesAmadeusОценок пока нет
- SOV ConductionДокумент47 страницSOV ConductionRanadip AcharyaОценок пока нет
- Green's Function in Spherical Polar CoordinatesДокумент5 страницGreen's Function in Spherical Polar CoordinatesRaymart Jay CanoyОценок пока нет
- Outline CD 2Документ9 страницOutline CD 2Imdadul HaqueОценок пока нет
- F07 Hw06aДокумент13 страницF07 Hw06aAdam ChanОценок пока нет
- An Introduction To Signal Detection and Estimation - Second EditionДокумент9 страницAn Introduction To Signal Detection and Estimation - Second EditionrohanpatilpaОценок пока нет
- Arithmetic Properties of The Ramanujan FunctionДокумент8 страницArithmetic Properties of The Ramanujan Functionapi-26401608Оценок пока нет
- AD Homework 4 - SolutionДокумент2 страницыAD Homework 4 - SolutionJonОценок пока нет
- Hydrogen Atom: Numerical MethodsДокумент11 страницHydrogen Atom: Numerical MethodsBryan HarterОценок пока нет
- Some Problems and Solutions - Chapter 3 FWДокумент6 страницSome Problems and Solutions - Chapter 3 FWעוז אושריОценок пока нет
- An Trivial Analisys of Ocean TidesДокумент4 страницыAn Trivial Analisys of Ocean TidesNguyen LyОценок пока нет
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)От EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Оценок пока нет
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОт EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОценок пока нет
- A-level Maths Revision: Cheeky Revision ShortcutsОт EverandA-level Maths Revision: Cheeky Revision ShortcutsРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Public Ad IДокумент8 страницPublic Ad IsaurabhdabasОценок пока нет
- MSO201A/ESO209: Probability & StatisticsДокумент1 страницаMSO201A/ESO209: Probability & Statisticspntgaur54185Оценок пока нет
- FSW K10x LTE DL UserManual en 06Документ219 страницFSW K10x LTE DL UserManual en 06pntgaur54185Оценок пока нет
- EE 758 Interenet EconomicsДокумент1 страницаEE 758 Interenet Economicspntgaur54185Оценок пока нет
- VocabularyДокумент3 страницыVocabularypntgaur54185Оценок пока нет
- HW 2Документ1 страницаHW 2pntgaur54185Оценок пока нет
- Matlab Installion LinuxДокумент1 страницаMatlab Installion Linuxpntgaur54185Оценок пока нет
- Ps 3Документ3 страницыPs 3pntgaur54185Оценок пока нет
- Culture Complete Notes MrunalДокумент51 страницаCulture Complete Notes Mrunalamarsinha198767% (6)
- Ps 2Документ2 страницыPs 2pntgaur54185Оценок пока нет
- MAC Feb 3Документ17 страницMAC Feb 3pntgaur54185Оценок пока нет
- Electronics CommunicationДокумент32 страницыElectronics CommunicationRamesh SinghОценок пока нет
- Integration Formulas: 1. Common IntegralsДокумент5 страницIntegration Formulas: 1. Common IntegralssiegherrОценок пока нет
- Ubicc Id 545 Partroute S Sarangi S Kar 545Документ9 страницUbicc Id 545 Partroute S Sarangi S Kar 545Ubiquitous Computing and Communication JournalОценок пока нет
- WSNs & RFID IntegrationДокумент29 страницWSNs & RFID Integrationpntgaur54185Оценок пока нет
- Notes HW1 NotesДокумент5 страницNotes HW1 Notespntgaur54185Оценок пока нет
- Industrial ManagementДокумент5 страницIndustrial Managementway2bhatiaОценок пока нет
- Time Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10Документ12 страницTime Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10pntgaur54185Оценок пока нет
- Time Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10Документ12 страницTime Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10pntgaur54185Оценок пока нет
- Time Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10Документ12 страницTime Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10pntgaur54185Оценок пока нет
- Time Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10Документ12 страницTime Table Odd Semester Ec Deptt 2010 MODIFIED 12 AUG 10pntgaur54185Оценок пока нет
- The Principal Apeejay School Sec-16, Noida (U.P) Respeced Sir, With Due RegardsДокумент1 страницаThe Principal Apeejay School Sec-16, Noida (U.P) Respeced Sir, With Due Regardspntgaur54185Оценок пока нет
- 2 ProbabilityДокумент16 страниц2 ProbabilityhfzhnОценок пока нет
- Bio-Data (DR.P.K.sharMA) As On 13th June 2023Документ34 страницыBio-Data (DR.P.K.sharMA) As On 13th June 2023Poonam Kumar SharmaОценок пока нет
- Laplace Table PDFДокумент2 страницыLaplace Table PDFJohn Carlo SacramentoОценок пока нет
- MIT18 404f20 Lec3Документ13 страницMIT18 404f20 Lec3Zuci DarkОценок пока нет
- Lyapunov Functionals and Stability of Stochastic Functional Differential Equations PDFДокумент351 страницаLyapunov Functionals and Stability of Stochastic Functional Differential Equations PDFAnonymous bZtJlFvPtp100% (1)
- B.A/B.Sc. Part-Il Exam, 2020 Paper-L1, Session (2018-21) : WordsДокумент5 страницB.A/B.Sc. Part-Il Exam, 2020 Paper-L1, Session (2018-21) : WordsHëçtõr ÅñüpâmОценок пока нет
- Equation of Circle ModuleДокумент16 страницEquation of Circle Modulepiriwpiw26Оценок пока нет
- Cambridge Math Schedules PDFДокумент42 страницыCambridge Math Schedules PDFHenrique SousaОценок пока нет
- Short Tricks of Multiplication PDFДокумент8 страницShort Tricks of Multiplication PDFRamesh KumarОценок пока нет
- Analytical Hierarchy Process Matrix Template To Analyze Csi Per Customer Month WiseДокумент49 страницAnalytical Hierarchy Process Matrix Template To Analyze Csi Per Customer Month WiseS. Aryo NoegrohoОценок пока нет
- CS273 Theory of Automata & Fomal Languages: (WEEK-2) Lecture-3 & 4Документ41 страницаCS273 Theory of Automata & Fomal Languages: (WEEK-2) Lecture-3 & 4Sajal FayyazОценок пока нет
- Erum Dost - Simulation of Models Exhibiting Runge's PhenomenonДокумент13 страницErum Dost - Simulation of Models Exhibiting Runge's Phenomenonuser77975Оценок пока нет
- Mathematics Grade 1Документ7 страницMathematics Grade 1IrqamОценок пока нет
- Ass 4 FJPДокумент3 страницыAss 4 FJPAnonymous WyTCUDyWОценок пока нет
- Algebra 1 SyllabusДокумент3 страницыAlgebra 1 SyllabusdavidmherronОценок пока нет
- 2011 (Engg-Mat) emДокумент9 страниц2011 (Engg-Mat) emGandla Ravi ThejaОценок пока нет
- Not CNNДокумент8 страницNot CNN장민종Оценок пока нет
- Maths Paper 1 QP 2020Документ16 страницMaths Paper 1 QP 2020notxando75% (4)
- XI - Maths - Chapter 15 - STATISTICS (123-139)Документ18 страницXI - Maths - Chapter 15 - STATISTICS (123-139)SANTHOSH KUMARОценок пока нет
- NUS ST2334 Lecture NotesДокумент56 страницNUS ST2334 Lecture NotesWang ShenghaoОценок пока нет
- Project Soar - Quarter 2 Week 1Документ47 страницProject Soar - Quarter 2 Week 1Mar Rey DelacruzОценок пока нет
- A No-Nonsense Introduction To General Relativity (Sean Carroll)Документ24 страницыA No-Nonsense Introduction To General Relativity (Sean Carroll)Hirokazu Nishimura100% (1)
- Al Mahdi High Schools: Mathematics - Grade Name: - . - . - . S.S-1.2Документ4 страницыAl Mahdi High Schools: Mathematics - Grade Name: - . - . - . S.S-1.2api-253679034Оценок пока нет
- EM220 Bachelor of Engineering (Hons) Mechanical MEC 500 Numerical Method With Application Assignment Emd6M8AДокумент7 страницEM220 Bachelor of Engineering (Hons) Mechanical MEC 500 Numerical Method With Application Assignment Emd6M8A000Оценок пока нет
- Coordinate SystemДокумент7 страницCoordinate SystemSarwar Hosen SimonОценок пока нет
- 32820Документ11 страниц32820hamedassafОценок пока нет
- Learning Hessian Matrix PDFДокумент100 страницLearning Hessian Matrix PDFSirajus SalekinОценок пока нет
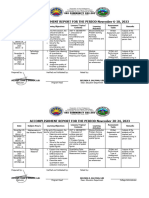
- Mike Ranada Accomplishment Report November 2023Документ3 страницыMike Ranada Accomplishment Report November 2023MARICSON TEOPEОценок пока нет
- Lectures in Abstract Algebra (I. Basic Concepts) - Nathan JacobsonДокумент226 страницLectures in Abstract Algebra (I. Basic Concepts) - Nathan JacobsonAngelica Maria Abanto Vera83% (6)
- BCH CodesДокумент11 страницBCH CodesAmol AmollОценок пока нет