Вам также может понравиться
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Testing Levels & ApproachesДокумент17 страницTesting Levels & ApproachesDeep AdhikaryОценок пока нет
- Basic of Comp Prob 8Документ37 страницBasic of Comp Prob 8VedantGonnadeОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Stage 2module 1Документ104 страницыStage 2module 1ShaikSa'adUllahОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Basic of Comp Prob 4Документ17 страницBasic of Comp Prob 4VedantGonnadeОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Structured Programming Techniques for Modular DesignДокумент7 страницStructured Programming Techniques for Modular Designkeerthi k raoОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Software Development OverviewДокумент16 страницSoftware Development OverviewSyam MohanОценок пока нет
- 1 What Is ProgrammingДокумент9 страниц1 What Is ProgrammingSyam MohanОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Ise Tutorial Ug695Документ148 страницIse Tutorial Ug695Shanmuga NathanОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Test Data 808nm, Conduction-Cooled Diode Laser Single BarДокумент7 страницTest Data 808nm, Conduction-Cooled Diode Laser Single BarUmar BadshahОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- Instruction Manual: Kistler GPS Sensor Compact Travel Sensors Type CGPSSAДокумент46 страницInstruction Manual: Kistler GPS Sensor Compact Travel Sensors Type CGPSSATranОценок пока нет
- Detailed Syllabus - Optical CommunicationДокумент3 страницыDetailed Syllabus - Optical Communicationiamitgarg7Оценок пока нет
- North China Research Institute 13m Ka-Band AntennaДокумент5 страницNorth China Research Institute 13m Ka-Band Antennaanon_142925513Оценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- 2D Wireless Barcode Scanner Setup ManualДокумент28 страниц2D Wireless Barcode Scanner Setup ManualHarry AgrontОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- DC To AC InvertersДокумент41 страницаDC To AC Invertersarefiqrc100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- L16: Noise Performance of SSB & AM: (P&S Pp. 220-225 C&C 10.2)Документ9 страницL16: Noise Performance of SSB & AM: (P&S Pp. 220-225 C&C 10.2)Hunter VerneОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Georgita Radio1 BA PTДокумент292 страницыGeorgita Radio1 BA PTHjac CarvalhoОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- ImagePRESS C1 SM DU7-1199-010 NoRestrictionДокумент6 страницImagePRESS C1 SM DU7-1199-010 NoRestrictionGabriel VoicuОценок пока нет
- Compact 2500W FM Transmitter With Reliable DesignДокумент1 страницаCompact 2500W FM Transmitter With Reliable DesignBryan CustodioОценок пока нет
- Hitachi Dz-Mv550a Mv580a SvcmnlsДокумент169 страницHitachi Dz-Mv550a Mv580a SvcmnlsMario Rodriguez JuradoОценок пока нет
- Device MDM DetailДокумент3 страницыDevice MDM DetailDaniel AngelescuОценок пока нет
- WLAN NetworkingДокумент247 страницWLAN NetworkingNazar AzizОценок пока нет
- Installing and Using the ASA 214 Antenna SplitterДокумент16 страницInstalling and Using the ASA 214 Antenna Splitterlonestar StarОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Optical Fiber Question Bank for Optical Communication and NetworksДокумент16 страницOptical Fiber Question Bank for Optical Communication and NetworksAnonymous 1izmJeJОценок пока нет
- UMTS 7 1 KPI Quick Ref RC Aug2013 PDFДокумент307 страницUMTS 7 1 KPI Quick Ref RC Aug2013 PDFShelton SizibaОценок пока нет
- Service Manual: MODEL: DV6T711D / DV6T111D DV6T711P / DV6T111P DV6T711S / DV6T111S DV6T721D DV6T721P DV6T721SДокумент65 страницService Manual: MODEL: DV6T711D / DV6T111D DV6T711P / DV6T111P DV6T711S / DV6T111S DV6T721D DV6T721P DV6T721SloispfermarОценок пока нет
- B D C B C D: 1971 Sunn Sceptre With Mid BoostДокумент3 страницыB D C B C D: 1971 Sunn Sceptre With Mid BoostjustinОценок пока нет
- Ac Single PhaseДокумент35 страницAc Single PhaseBerihun EngdaОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Huawei's MSC Pool Creates Worry-Free NetworksДокумент4 страницыHuawei's MSC Pool Creates Worry-Free NetworksKunaka KunakazwОценок пока нет
- Natural or Line Commutation - Principle With Circuit Diagram - Electrical ConceptsДокумент3 страницыNatural or Line Commutation - Principle With Circuit Diagram - Electrical ConceptsMohammad HamamdОценок пока нет
- Q4 HOT SELLING Products List - ReleeДокумент9 страницQ4 HOT SELLING Products List - ReleeDubravka VukelicОценок пока нет
- Full HD Digital T2 Terrestrial / Cable Receiver With Conax Embedded Card ReaderДокумент2 страницыFull HD Digital T2 Terrestrial / Cable Receiver With Conax Embedded Card ReaderDan CooperОценок пока нет
- Nhập môn Công nghệ Thông tinДокумент25 страницNhập môn Công nghệ Thông tinGà Lê vănОценок пока нет
- SCADA-Networking Protocol For Data ExchangeДокумент83 страницыSCADA-Networking Protocol For Data ExchangeRaja RamОценок пока нет
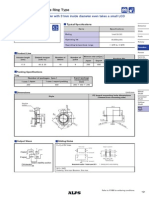
- 50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDДокумент3 страницы50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDshyhuОценок пока нет
- Pruef Messtechnik en PDFДокумент40 страницPruef Messtechnik en PDFFCO ANTONIO CHACONОценок пока нет
- CSC-339 Introduction to Computer NetworksДокумент79 страницCSC-339 Introduction to Computer NetworksRaffay aliОценок пока нет
- Questions For DSP VivaДокумент4 страницыQuestions For DSP Vivalovelyosmile253Оценок пока нет
- Two-Port Network - WikipediaДокумент9 страницTwo-Port Network - WikipediasukhoiОценок пока нет