Вам также может понравиться
- Viscous-Flow Simulation of An Open-Wheel Race CarДокумент9 страницViscous-Flow Simulation of An Open-Wheel Race CarVyssionОценок пока нет
- Human Factors Design GuideДокумент15 страницHuman Factors Design GuideAndré da MargemОценок пока нет
- BV Spring Rate Calculator V6.4Документ16 страницBV Spring Rate Calculator V6.4Anonymous QiMB2lBCJLОценок пока нет
- Concrete Pavement Backcalculation Uing ILLI-BACK 3.0Документ22 страницыConcrete Pavement Backcalculation Uing ILLI-BACK 3.0Sri Ramya100% (1)
- Report On Turbo Cooling SystemДокумент33 страницыReport On Turbo Cooling SystemDeepakKumarОценок пока нет
- SIDRA Intersection Guideline ADOPTEDДокумент18 страницSIDRA Intersection Guideline ADOPTEDmrdvirusОценок пока нет
- Roundabouts An Informational Guide - US Department of TransportationДокумент277 страницRoundabouts An Informational Guide - US Department of TransportationmrdvirusОценок пока нет
- CSUKs Algorithm Writing Guide and WorkbookДокумент73 страницыCSUKs Algorithm Writing Guide and Workbooksaimaagarwal220508Оценок пока нет
- 10mat Beta Textbook 2 AnswersДокумент413 страниц10mat Beta Textbook 2 AnswersRaymond WangОценок пока нет
- The Golden Ratio and Fibonacci Sequences in Nature Art and ArchitectureДокумент5 страницThe Golden Ratio and Fibonacci Sequences in Nature Art and Architectureomeryounos100% (2)
- TURN - LSP Turn Radius Instructions For Use With Imperial Unit AASHTO Vehicle Blocks (AASHTO Green Book 2011 Edition)Документ3 страницыTURN - LSP Turn Radius Instructions For Use With Imperial Unit AASHTO Vehicle Blocks (AASHTO Green Book 2011 Edition)Милановић НемањаОценок пока нет
- Aerodynamics of Road Vehicles HUCHO PDFДокумент55 страницAerodynamics of Road Vehicles HUCHO PDFigormagalhaes87100% (1)
- 1997-2001 H-D Touring Models Installation Instructions: 1997-01 Models Require Belt UpgradeДокумент37 страниц1997-2001 H-D Touring Models Installation Instructions: 1997-01 Models Require Belt UpgradeRamses Vivas100% (1)
- Aerodynamics of Road Vehicles (List of Chapters)Документ8 страницAerodynamics of Road Vehicles (List of Chapters)Masoud Afroosheh0% (1)
- Autoturn Training Manual EnglishДокумент90 страницAutoturn Training Manual EnglishMiorga88Оценок пока нет
- Aircraft Tire PropertiesДокумент2 страницыAircraft Tire PropertiesPaul Orellana0% (1)
- NeratorsДокумент6 страницNeratorsimtiyazОценок пока нет
- Spoiler (Car)Документ6 страницSpoiler (Car)phutd09Оценок пока нет
- Hydroplaning ResearchДокумент56 страницHydroplaning ResearchNathan MartinОценок пока нет
- Bladder Type AccumulatorДокумент32 страницыBladder Type Accumulatormkoelreal100% (1)
- Helicopter Freewheel Unit Design GuideДокумент240 страницHelicopter Freewheel Unit Design Guidemattgrubbs100% (1)
- Installation & Operational Manual Model D6080 27k Hydraulic Cart LifterДокумент45 страницInstallation & Operational Manual Model D6080 27k Hydraulic Cart Lifterstainless31620039126Оценок пока нет
- Propeller Stockpile Measurement and Reports With Drone Surveying EbookДокумент17 страницPropeller Stockpile Measurement and Reports With Drone Surveying EbookmuazeemK100% (1)
- 2008 Hummer H3 GetknowДокумент20 страниц2008 Hummer H3 Getknowdieg82100% (1)
- Aerodynamics and AeroacousticsДокумент8 страницAerodynamics and Aeroacousticssantiago100% (1)
- HeliExperts Heliport Risk and Liablity Asessment Toolkit V1.3LДокумент70 страницHeliExperts Heliport Risk and Liablity Asessment Toolkit V1.3LMiguel AngelОценок пока нет
- Manual Micro GCДокумент196 страницManual Micro GCIceMAtluckyОценок пока нет
- 4 Ref - Comparative Investigation of Large Eddy Simulation and RANS...Документ130 страниц4 Ref - Comparative Investigation of Large Eddy Simulation and RANS...dragishaОценок пока нет
- The Aerodynamic Interaction Between An Inverted Wing and A Rotating WheelДокумент13 страницThe Aerodynamic Interaction Between An Inverted Wing and A Rotating WheelVyssionОценок пока нет
- Friction Guide With AASHTO Changes - 8-14-2007 Line NosДокумент84 страницыFriction Guide With AASHTO Changes - 8-14-2007 Line NosFarah AlMusawi100% (1)
- HERRAMIENTA DE LLENADO - AutoFill PDFДокумент15 страницHERRAMIENTA DE LLENADO - AutoFill PDFluis alberto franco rodriguezОценок пока нет
- Sheet Metal Gauge Size Chart-1Документ1 страницаSheet Metal Gauge Size Chart-1rahil_sangОценок пока нет
- Baja'18 Problem Statements 1Документ2 страницыBaja'18 Problem Statements 1Shubham GuptaОценок пока нет
- Method of Drag ReductionДокумент8 страницMethod of Drag Reductionkapil.scribdОценок пока нет
- 2015 Technical Regulation A1GPДокумент30 страниц2015 Technical Regulation A1GPKeine AngbeОценок пока нет
- Jntu World: Lecture Note Engineering SurveyingДокумент78 страницJntu World: Lecture Note Engineering SurveyingPuneetkumar GargОценок пока нет
- OpenDroneMap The Missing Guide - FinalДокумент282 страницыOpenDroneMap The Missing Guide - FinalFelipe GuedesОценок пока нет
- Drone Industry Barometer 2022Документ19 страницDrone Industry Barometer 2022贾宗林Оценок пока нет
- Hydroplaning of Modern Aircraft TiresДокумент11 страницHydroplaning of Modern Aircraft TiresCarlosKentОценок пока нет
- Aerodynamics 2Документ17 страницAerodynamics 2Charm YakuzaОценок пока нет
- Factors Affecting Car Fuel ConsumptionДокумент23 страницыFactors Affecting Car Fuel ConsumptionScribd898989100% (1)
- Evs CatalogДокумент8 страницEvs Catalogkaesar66Оценок пока нет
- Brake SystemДокумент76 страницBrake Systemrichmart8210Оценок пока нет
- Black HawkДокумент125 страницBlack HawkJohn FermanОценок пока нет
- 2000 118 ZhangX Diffuser in Ground EffectДокумент9 страниц2000 118 ZhangX Diffuser in Ground EffectMarcos SoarОценок пока нет
- Aermacchi MB-339 ManualДокумент71 страницаAermacchi MB-339 ManualCHRISTOPHER LONGОценок пока нет
- A4CE Rev 48-2Документ44 страницыA4CE Rev 48-2amalecadanОценок пока нет
- APX Mobile Accessory FinalДокумент12 страницAPX Mobile Accessory FinalbreaserОценок пока нет
- Aerodynamic Study of The Wake Effects On A Formula 1 CarДокумент25 страницAerodynamic Study of The Wake Effects On A Formula 1 CarLumpiang Toge100% (1)
- Optimumt Product Description: Key FeaturesДокумент6 страницOptimumt Product Description: Key FeaturesPierre LalsingОценок пока нет
- Introduction To FlightДокумент38 страницIntroduction To FlightDavid John BalanagОценок пока нет
- RadioLink AT10II User ManualДокумент84 страницыRadioLink AT10II User ManualMiguel Sanchez100% (1)
- An End-User's Guide To Centrifugal Pump RotordynamicsДокумент22 страницыAn End-User's Guide To Centrifugal Pump RotordynamicsbwelzОценок пока нет
- Ground Effect in Formula One: Oliver Mercer-U1554386 - Communication & Research-NPE0001 - February 16, 2016Документ17 страницGround Effect in Formula One: Oliver Mercer-U1554386 - Communication & Research-NPE0001 - February 16, 2016Oliver MercerОценок пока нет
- High Lift Aerofoils For Low Aspect Ratio Wings With EndplatesДокумент10 страницHigh Lift Aerofoils For Low Aspect Ratio Wings With EndplatesVyssion100% (1)
- R44 Estimated Operating CostsДокумент1 страницаR44 Estimated Operating CostsHeiriОценок пока нет
- Aerodynamics of A Wing in Ground Effect in Generic Racing Car Wake FlowsДокумент13 страницAerodynamics of A Wing in Ground Effect in Generic Racing Car Wake FlowsVyssionОценок пока нет
- Sensors for Automotive ApplicationsОт EverandSensors for Automotive ApplicationsJiri MarekРейтинг: 5 из 5 звезд5/5 (1)
- Unmanned Aircraft SystemsОт EverandUnmanned Aircraft SystemsElla AtkinsОценок пока нет
- International Arbitration: The Seat is King: THE ART OF AMICABILITY, #1От EverandInternational Arbitration: The Seat is King: THE ART OF AMICABILITY, #1Оценок пока нет
- How To Convert Family Visit Visa To Residence Visa in QatarДокумент2 страницыHow To Convert Family Visit Visa To Residence Visa in QatarmrdvirusОценок пока нет
- Sidra IntersectionДокумент25 страницSidra Intersectionmrdvirus100% (1)
- AutoTURN NotesДокумент6 страницAutoTURN NotesmrdvirusОценок пока нет
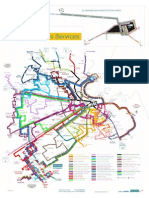
- Karawa Doha Bus Service RouteДокумент1 страницаKarawa Doha Bus Service Routeprsiva2420034066Оценок пока нет
- Traffic Signs Manual Chapter 08 Part 01Документ335 страницTraffic Signs Manual Chapter 08 Part 01oadipphone7031100% (1)
- 5 3AssembliesCorridorsДокумент64 страницы5 3AssembliesCorridorsRavi ShenkerОценок пока нет
- Capacity of Urban ArterialsДокумент38 страницCapacity of Urban ArterialsmrdvirusОценок пока нет
- Horizontal Curves BasicsДокумент22 страницыHorizontal Curves Basicsmrdvirus100% (2)
- Vertical CurvesДокумент25 страницVertical CurvesMartha LacerdaОценок пока нет
- Vertical CurvesДокумент25 страницVertical CurvesMartha LacerdaОценок пока нет
- Horizontal Curves BasicsДокумент22 страницыHorizontal Curves Basicsmrdvirus100% (2)
- MPДокумент16 страницMPLavanya ReddyОценок пока нет
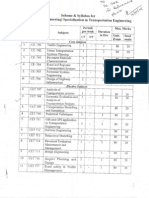
- Syllabus Copy Me CivilДокумент45 страницSyllabus Copy Me CivilmrdvirusОценок пока нет
- Cross TabsДокумент7 страницCross TabsSowmya ShreeОценок пока нет
- Proc ReportДокумент7 страницProc ReportrajeshdatastageОценок пока нет
- T Distribution and Test of Hypothesis Part I STEMДокумент30 страницT Distribution and Test of Hypothesis Part I STEMnicole quilangОценок пока нет
- Prosiding ICTEET STIE LMII Bosker SinagaДокумент27 страницProsiding ICTEET STIE LMII Bosker SinagaBosker SinagaОценок пока нет
- CNS 41 (File)Документ36 страницCNS 41 (File)Krupa PatelОценок пока нет
- Real GasДокумент8 страницReal GasAmartya AnshumanОценок пока нет
- System Software 2019Документ17 страницSystem Software 2019SudharshanОценок пока нет
- Young Chap 1Документ26 страницYoung Chap 1Himanshu1712Оценок пока нет
- VenaДокумент328 страницVenasujithaОценок пока нет
- PDSP ArchitectureДокумент95 страницPDSP ArchitecturekrajasekarantutiОценок пока нет
- BrachistochroneДокумент36 страницBrachistochrone2010chanОценок пока нет
- UT Dallas Syllabus For Opre6374.pjm.08s Taught by James Joiner (Jamesj)Документ15 страницUT Dallas Syllabus For Opre6374.pjm.08s Taught by James Joiner (Jamesj)UT Dallas Provost's Technology GroupОценок пока нет
- Daan Sarile Integrated School: Schools Division OfficeДокумент4 страницыDaan Sarile Integrated School: Schools Division OfficekiezelОценок пока нет
- 3 English 2ND Sem 18-19Документ9 страниц3 English 2ND Sem 18-19Marlene A. RamosОценок пока нет
- MTZ Worldwide Jan 2011Документ50 страницMTZ Worldwide Jan 2011biopoweredОценок пока нет
- Detailed Lesson Plan in Mathematics 8 Junior - HighschoolДокумент3 страницыDetailed Lesson Plan in Mathematics 8 Junior - HighschoolKarlstein Foñollera DiaoОценок пока нет
- Handprint Perspective Part 0Документ11 страницHandprint Perspective Part 0savrtuthdОценок пока нет
- Incompressible Navier-Stokes RequirementsДокумент13 страницIncompressible Navier-Stokes Requirementsramy86Оценок пока нет
- Mechanic Lab ReportДокумент5 страницMechanic Lab ReportPanasheMuduzuОценок пока нет
- 3815333Документ80 страниц3815333Sumbal KeranОценок пока нет
- CSCI 240 Lecture NotesДокумент14 страницCSCI 240 Lecture NotesOkiring SilasОценок пока нет
- Carl B Boyer - Foremost ModernДокумент1 страницаCarl B Boyer - Foremost ModernayanamikidoОценок пока нет
- PHD Thesis JD - CR - GS - FinalДокумент185 страницPHD Thesis JD - CR - GS - FinalmvillabrОценок пока нет
- JavaScript (JS) Cheat Sheet OnlineДокумент3 страницыJavaScript (JS) Cheat Sheet OnlinerajikareОценок пока нет
- USA Mathematical Talent Search Solutions To Problem 4/1/18Документ1 страницаUSA Mathematical Talent Search Solutions To Problem 4/1/18สฮาบูดีน สาและОценок пока нет
- NEET UG Physics Electromagnetic Induction MCQs PDFДокумент24 страницыNEET UG Physics Electromagnetic Induction MCQs PDFitzshiona heyОценок пока нет
- P436 Lect 13Документ20 страницP436 Lect 13Zhenhua HuangОценок пока нет
- Tutorial 2 Integration by Parts, Trigo Integrals, Inverse Trigo and Partial FractionsДокумент6 страницTutorial 2 Integration by Parts, Trigo Integrals, Inverse Trigo and Partial FractionsAinnur SyabihaОценок пока нет