Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Black Box Programme and The Rose Gold Flame As Antidote How To Shield Yourself From Chemtrails, 5G, EMFs and Other... (Magenta Pixie (Pixie, Magenta) )Документ64 страницыThe Black Box Programme and The Rose Gold Flame As Antidote How To Shield Yourself From Chemtrails, 5G, EMFs and Other... (Magenta Pixie (Pixie, Magenta) )G CОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Fleet Oceanographic and Acoustic (RP33)Документ234 страницыFleet Oceanographic and Acoustic (RP33)Jose Ricardo MendeZ100% (4)
- Nat 12 Mock TestДокумент13 страницNat 12 Mock TestMARC DANIEL CALUBОценок пока нет
- Sample Structural AnalysisДокумент66 страницSample Structural AnalysisJohn Vincent L. Ambrocio50% (2)
- 120k Active Code 668-2Документ4 страницы120k Active Code 668-2selviantobilmon78Оценок пока нет
- DM210434 - 180309 - Rev. 0 - UKДокумент154 страницыDM210434 - 180309 - Rev. 0 - UKrobОценок пока нет
- C1070 - NDE RequirementsДокумент7 страницC1070 - NDE RequirementsWill SmithОценок пока нет
- Vardanega Bolton - (2013) - Stiffness of Clays and Silts Modelling ConsiderationsДокумент7 страницVardanega Bolton - (2013) - Stiffness of Clays and Silts Modelling ConsiderationsAnonymous PibYPgh100% (1)
- Module 3.1 - Ideal - GasДокумент26 страницModule 3.1 - Ideal - GasMax100% (1)
- Basic Tech Lesson Note Week 4 Summer TermДокумент3 страницыBasic Tech Lesson Note Week 4 Summer Termobumneame azukaОценок пока нет
- Topic 4 Differential Pressure and Flow Sensors (Bernoulli Principle Venturi Effect)Документ8 страницTopic 4 Differential Pressure and Flow Sensors (Bernoulli Principle Venturi Effect)Vefa MustafazadeОценок пока нет
- Colour and Form-I: Design Course The Fundamentals of Colour by Ms. Nijoo Dubey NID Campus, BengaluruДокумент40 страницColour and Form-I: Design Course The Fundamentals of Colour by Ms. Nijoo Dubey NID Campus, BengaluruKalpa RОценок пока нет
- Zerilli 1970Документ20 страницZerilli 1970Andrea PlacidiОценок пока нет
- Lesson 6 - Chain Rule - General FormulaДокумент12 страницLesson 6 - Chain Rule - General FormulaJacob SanchezОценок пока нет
- Introduction To Motor DrivesДокумент24 страницыIntroduction To Motor Drivessukhbat sodnomdorjОценок пока нет
- 91 Senate Approved Courses Scheme & Syllabus For B.E. Mechanical Engg. (2016)Документ2 страницы91 Senate Approved Courses Scheme & Syllabus For B.E. Mechanical Engg. (2016)VINAYAK SHARMAОценок пока нет
- Unified Council Results NSTSE ResultsДокумент1 страницаUnified Council Results NSTSE ResultsDevashish RaiОценок пока нет
- GEEE'2016 BookletДокумент34 страницыGEEE'2016 Bookletجمال ضيفي100% (1)
- 6.2 Extra PracticeДокумент2 страницы6.2 Extra PracticeAhmed hassanОценок пока нет
- 8 Worksheet (AS) Deformation: 2dd 2d 2lДокумент3 страницы8 Worksheet (AS) Deformation: 2dd 2d 2lMahad AsimОценок пока нет
- Lesson 36 Methods For Solving Simultaneous Ordinary Differential EquationsДокумент6 страницLesson 36 Methods For Solving Simultaneous Ordinary Differential EquationsHussam AgabОценок пока нет
- States of Matter Practice TestДокумент2 страницыStates of Matter Practice TestSadiaKanwalОценок пока нет
- ASEE 2015 12476 FinalДокумент21 страницаASEE 2015 12476 FinalHenry Theodore DaquinagОценок пока нет
- ECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 16-Jan-2014, Room H101Документ9 страницECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 16-Jan-2014, Room H101Eduardo FerreiraОценок пока нет
- Ramazan 1443 AHДокумент3 страницыRamazan 1443 AHKhawaja BurhanОценок пока нет
- Laboratory NameДокумент16 страницLaboratory Namegopinadh57Оценок пока нет
- MW Lab Manual 17euec053Документ131 страницаMW Lab Manual 17euec053Level Zero GamingОценок пока нет
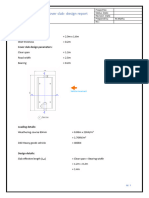
- D400-Precast Cover Slab Design ReportДокумент8 страницD400-Precast Cover Slab Design ReportmathuОценок пока нет
- Design and Control of Condensate-Throttling ReboilersДокумент12 страницDesign and Control of Condensate-Throttling ReboilersForcus onОценок пока нет
- Reinforced Conrete Design Elevated Water Tank Design ProjectДокумент28 страницReinforced Conrete Design Elevated Water Tank Design Projectyusof mohd ariffОценок пока нет