Вам также может понравиться
- Check List Orden y Limpieza Lugares de TrabajoДокумент6 страницCheck List Orden y Limpieza Lugares de TrabajoTeresa Romero Salinas0% (1)
- Reparación de Tarjeta de Lavadora SamsungДокумент34 страницыReparación de Tarjeta de Lavadora Samsungjulfo0575% (4)
- Reparación de Tarjeta de Lavadora SamsungДокумент34 страницыReparación de Tarjeta de Lavadora Samsungjulfo0575% (4)
- Guia 01 IndexadoДокумент28 страницGuia 01 Indexadojulfo05Оценок пока нет
- Laboratorio INYECION SQLДокумент19 страницLaboratorio INYECION SQLSamuel Celis JeremichОценок пока нет
- Manual LabViewДокумент59 страницManual LabViewMarcelo DanielОценок пока нет
- Electrotecnia 350 Conceptos Teoricos y 300 Problemas 10ed PDFДокумент443 страницыElectrotecnia 350 Conceptos Teoricos y 300 Problemas 10ed PDFDavid Fajardo Puerto80% (5)
- Sistemas EmbebidosДокумент56 страницSistemas EmbebidosMiguel Martinez100% (1)
- Principios de Economia Capitulo 3Документ6 страницPrincipios de Economia Capitulo 3jhunior alexanderОценок пока нет
- Practica #3 CosimirДокумент5 страницPractica #3 Cosimirjulfo05Оценок пока нет
- Codigos de Programacion para CNC Tipos G y MДокумент9 страницCodigos de Programacion para CNC Tipos G y MFernando SalinasОценок пока нет
- Reporte Practicas CosimirДокумент31 страницаReporte Practicas CosimirMisaka UshimuraОценок пока нет
- RV2AJ Cosimir TrialДокумент12 страницRV2AJ Cosimir TrialLuis Enrique Davalos CanalesОценок пока нет
- Manual Movemaster EspañolДокумент33 страницыManual Movemaster EspañolRuben Amaro MichelОценок пока нет
- 01 Microcontrolador PIC16F877A PDFДокумент59 страниц01 Microcontrolador PIC16F877A PDFJorge HuamanОценок пока нет
- Diseño de Losa Maciza PUENTES PDFДокумент33 страницыDiseño de Losa Maciza PUENTES PDFAndres Navarro100% (1)
- Control DigitalДокумент12 страницControl DigitalMYCDSJОценок пока нет
- Curso Eagle 6Документ31 страницаCurso Eagle 6Armandosky OsoskyОценок пока нет
- Practica Calificada #1 CosimirДокумент2 страницыPractica Calificada #1 Cosimirjulfo05Оценок пока нет
- Practica Calificada #1 CosimirДокумент2 страницыPractica Calificada #1 Cosimirjulfo05Оценок пока нет
- Laboratorio 8Документ18 страницLaboratorio 8cigarro3012Оценок пока нет
- Situacion Didactica No.02Документ13 страницSituacion Didactica No.02Anselmo Gonzalez100% (1)
- Control Digital - ESTABILIDADДокумент6 страницControl Digital - ESTABILIDADFabián MoralesОценок пока нет
- Manual Operacion Robot RV1Документ33 страницыManual Operacion Robot RV1chusbaОценок пока нет
- Apuntes Codigos CNCДокумент10 страницApuntes Codigos CNCDescargasScribdОценок пока нет
- Robotica IndustrialДокумент74 страницыRobotica IndustrialJunior José Saavedra HolguinОценок пока нет
- Control DigitalДокумент17 страницControl DigitalAlejandro A MejiasОценок пока нет
- Manual RVM 1Документ33 страницыManual RVM 1José Alejandro Lagos Mollo100% (1)
- Nieto Cardoso, Ezequiel - Psicoterapia, Principios y Técnicas - 1Документ27 страницNieto Cardoso, Ezequiel - Psicoterapia, Principios y Técnicas - 1Haydee Martínez Yupit100% (1)
- Control DigitalДокумент56 страницControl DigitalDaniel HernándezОценок пока нет
- Robot Mantenimiento RV m1 PDFДокумент16 страницRobot Mantenimiento RV m1 PDFRicardo Camacho RiveraОценок пока нет
- Programacion de Robot MitsubishiДокумент9 страницProgramacion de Robot MitsubishiPedro Glez R100% (1)
- Robot MitsubishiДокумент26 страницRobot MitsubishiDracoRodriguezОценок пока нет
- Tablas y Diagramas Vapor de AguaДокумент49 страницTablas y Diagramas Vapor de AguasbiriguldaОценок пока нет
- Manual Del RobotДокумент136 страницManual Del Robotabrap_delОценок пока нет
- 02 Transformada ZДокумент31 страница02 Transformada ZIsmael MinchalaОценок пока нет
- COSIMIR Practica 1 Uso de MVS MVR MVCДокумент32 страницыCOSIMIR Practica 1 Uso de MVS MVR MVCVICTOR JULIO ROSAS PARRA0% (1)
- Electricidad IndustrialДокумент17 страницElectricidad IndustrialDiana Melissa100% (1)
- Rinne BathtimeДокумент39 страницRinne BathtimeJunior MarcanoОценок пока нет
- LAB. 06 - Transformada Z PDFДокумент3 страницыLAB. 06 - Transformada Z PDFAnonymous iGvZPKrОценок пока нет
- LAB. 05 - Transformada ZДокумент6 страницLAB. 05 - Transformada ZDANILO YANDALY HUAMAN CALDERoNОценок пока нет
- CosimirДокумент5 страницCosimirtoroloco3000Оценок пока нет
- Informe Cable Db9Документ8 страницInforme Cable Db9camiler10100% (2)
- SQL InyectionДокумент8 страницSQL InyectionCristian David Gutierrez TorresОценок пока нет
- Cuestionario Control DigitalДокумент10 страницCuestionario Control DigitalKevin AlejandroОценок пока нет
- Practica Espacio de Trabajo de Un RobotДокумент3 страницыPractica Espacio de Trabajo de Un RobotMichelle Sarahí100% (1)
- Labo N°1 Sist. de Control IIДокумент7 страницLabo N°1 Sist. de Control IIDEIVI SLEYTER OBREGoN MONTALVOОценок пока нет
- LAB. 05 - Transformada ZДокумент6 страницLAB. 05 - Transformada ZMary Alarcon PalominoОценок пока нет
- Cable Con Conector DB9Документ7 страницCable Con Conector DB9Freddy Enrique Luna Mirabal100% (1)
- Symbolic Math Toolbox (Matlab)Документ7 страницSymbolic Math Toolbox (Matlab)Marvin BelloОценок пока нет
- ALCATELДокумент34 страницыALCATELGustavo SánchezОценок пока нет
- Codigo Hart Con LabviewДокумент35 страницCodigo Hart Con LabviewHugo ContrerasОценок пока нет
- IDS P7 Identificación Por SubespaciosДокумент6 страницIDS P7 Identificación Por SubespaciosXezús AnzhiraОценок пока нет
- 1 Reloj y ResetДокумент0 страниц1 Reloj y ResetGino PascualliОценок пока нет
- Robotica y Sistemas Neumaticos e HidraulicosДокумент21 страницаRobotica y Sistemas Neumaticos e HidraulicosjairozasОценок пока нет
- Errores de Acondicionamiento de SeñalesДокумент6 страницErrores de Acondicionamiento de SeñalesAlejandro GuarderasОценок пока нет
- Microcontroladores IntelДокумент8 страницMicrocontroladores IntelCDanEmpiresОценок пока нет
- Practica 7.0.1Документ3 страницыPractica 7.0.1SamuelEsauMorenoMorenoОценок пока нет
- Robot 3gdlДокумент6 страницRobot 3gdlflavioscrОценок пока нет
- Caracteristicas Robot-2c Controlador y Teach Box PDFДокумент8 страницCaracteristicas Robot-2c Controlador y Teach Box PDFJohn VH100% (1)
- Amplificadores Operacionales ECUACIONESДокумент3 страницыAmplificadores Operacionales ECUACIONESChristian Flores RОценок пока нет
- Implementacion de Labview en Arduino Uno Utilizando Sensor Ultrasonico HC-SR04Документ7 страницImplementacion de Labview en Arduino Uno Utilizando Sensor Ultrasonico HC-SR04Daniel Echeverría PérezОценок пока нет
- Lista de Precios Cctv.Документ183 страницыLista de Precios Cctv.Tecnosyste IngenieriaОценок пока нет
- Ensayo de AutomatizacionДокумент6 страницEnsayo de AutomatizacionLeoОценок пока нет
- Medición de Piezas Con Software Visión Artificial de LabviewДокумент9 страницMedición de Piezas Con Software Visión Artificial de Labviewvelasgugol100% (1)
- ReporteДокумент23 страницыReporteFrancisco Guadalupe Uc CanОценок пока нет
- Mini SumoДокумент11 страницMini SumoalupolloОценок пока нет
- Comandos Basicos COSIMIRДокумент19 страницComandos Basicos COSIMIRFrancisco Isco Rose Rivas Olvera0% (1)
- Fanuc OM CNC ManualДокумент23 страницыFanuc OM CNC ManualPacheco “dickcorporation” PachecoОценок пока нет
- Practica 2digitalmioДокумент9 страницPractica 2digitalmioStëvën JümäОценок пока нет
- Seleccionador de Piezas Por ColoresДокумент35 страницSeleccionador de Piezas Por ColoresFabian OrozcoОценок пока нет
- Manual de Usuario - Proceso1 V - 1.0Документ13 страницManual de Usuario - Proceso1 V - 1.0DANIEL DRACOОценок пока нет
- Practica #6 CosimirДокумент3 страницыPractica #6 Cosimirjulfo05Оценок пока нет
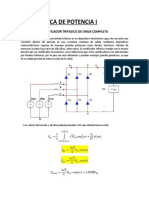
- Rectificador Trifasico de Onda CompletaДокумент6 страницRectificador Trifasico de Onda Completajulfo05Оценок пока нет
- 2.3 Programacion CNC - Elementos de Un ProgramaДокумент6 страниц2.3 Programacion CNC - Elementos de Un Programajulfo05Оценок пока нет
- 1.2 Programacion CNC - Elementos de Un CNCДокумент10 страниц1.2 Programacion CNC - Elementos de Un CNCjulfo05Оценок пока нет
- 4.2 Programacion CNC - Interpolación Angulo CotaДокумент2 страницы4.2 Programacion CNC - Interpolación Angulo Cotajulfo05Оценок пока нет
- 3.1 Programacion CNC - Puntos de ReferenciaДокумент3 страницы3.1 Programacion CNC - Puntos de Referenciajulfo05Оценок пока нет
- 6.1 Programacion CNC - Translado de OrigenДокумент5 страниц6.1 Programacion CNC - Translado de Origenjulfo05Оценок пока нет
- 3.1 Programacion CNC - Puntos de ReferenciaДокумент3 страницы3.1 Programacion CNC - Puntos de Referenciajulfo05Оценок пока нет
- Practica #1 CosimirДокумент2 страницыPractica #1 Cosimirjulfo05Оценок пока нет
- Practica #5 v.1 Cosimir - RoboticaДокумент4 страницыPractica #5 v.1 Cosimir - Roboticajulfo05Оценок пока нет
- Robotica - Tarea Entradas SalidasДокумент4 страницыRobotica - Tarea Entradas Salidasjulfo05Оценок пока нет
- Matrices de Rotacion de Robot 2DДокумент12 страницMatrices de Rotacion de Robot 2Djulfo05Оценок пока нет
- Helectrohidraulica PDFДокумент138 страницHelectrohidraulica PDFSergio Adrián TadeoОценок пока нет
- Semana 5 - Control GubernamentalДокумент12 страницSemana 5 - Control GubernamentalRichard Ramos AlcántaraОценок пока нет
- Instructivo para La Administracion de Almacenes Moviles en Las SucursalesДокумент8 страницInstructivo para La Administracion de Almacenes Moviles en Las Sucursalesrogelio65Оценок пока нет
- Pavimentos Rigidos para CarreterasДокумент77 страницPavimentos Rigidos para CarreterasEsther HoltОценок пока нет
- Secretaria de La MujerДокумент323 страницыSecretaria de La MujerCamila GuzmánОценок пока нет
- TRABAJO - Cimentaciones Profundas Por Pilotes - Tipo AIIIДокумент25 страницTRABAJO - Cimentaciones Profundas Por Pilotes - Tipo AIIIjelsi roddyОценок пока нет
- Plan de EmergenciaДокумент18 страницPlan de EmergenciaLookims BerserkerОценок пока нет
- CPMS-CPT HomologaciònДокумент280 страницCPMS-CPT HomologaciònClaudioOrdoñezОценок пока нет
- Tarea 3 - Grupo 153002 - 11Документ4 страницыTarea 3 - Grupo 153002 - 11valentina lopera betancurОценок пока нет
- Medicion de AudienciaДокумент7 страницMedicion de AudienciaRomii Cortez FloresОценок пока нет
- Práctica 5 y 8 SensoresДокумент7 страницPráctica 5 y 8 SensoresJoshua MadoraОценок пока нет
- Parcial Micro Op2Документ3 страницыParcial Micro Op2JHON EDWIN SOTO COLORADOОценок пока нет
- ConjuncionesДокумент3 страницыConjuncionesGuadalupe Pezantes BellezaОценок пока нет
- Bases de La Investigación Acción Educativa BabДокумент10 страницBases de La Investigación Acción Educativa BabWill RL CuadradexОценок пока нет
- Descargar Formato Matriz para Identificación de Peligros, Valoración de Riesgos y Determinación de Controles - S2Документ12 страницDescargar Formato Matriz para Identificación de Peligros, Valoración de Riesgos y Determinación de Controles - S2Laura SuarezОценок пока нет
- Reparacion Actuador Jeep XJДокумент18 страницReparacion Actuador Jeep XJCesarОценок пока нет
- Sesión 01 - Ii SemestreДокумент48 страницSesión 01 - Ii SemestreEdgar Norabuena FigueroaОценок пока нет
- Informe - de - Laboratorio - Ley SnellДокумент4 страницыInforme - de - Laboratorio - Ley SnellFelipe arias gutierrezОценок пока нет
- Aplicaciones de La Inteligencia ArtificialДокумент7 страницAplicaciones de La Inteligencia ArtificialtomОценок пока нет
- Trabajo Final - Carolina HerreraДокумент40 страницTrabajo Final - Carolina HerreratomascrespolobilloОценок пока нет
- ENSAYO 2. Etica y Moral, WordДокумент3 страницыENSAYO 2. Etica y Moral, WordWithney BerroetaОценок пока нет
- Charlotte Towle, FLORENCE HOLLISДокумент3 страницыCharlotte Towle, FLORENCE HOLLISPAPELERIA PIOLINОценок пока нет
- Aptitud AcadémicaДокумент30 страницAptitud AcadémicabelliytОценок пока нет
- Formato EvaluacionДокумент2 страницыFormato EvaluacionPepeito PerezОценок пока нет