Академический Документы
Профессиональный Документы
Культура Документы
E c264r Enft c11
Загружено:
Aghil Ghiasvand MkhОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
E c264r Enft c11
Загружено:
Aghil Ghiasvand MkhАвторское право:
Доступные форматы
Functional Description C264R/EN FT/C11
MiCOM C264-R
FUNCTIONAL DESCRIPTION
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 1/46
CONTENT
1. SCOPE OF THE DOCUMENT 5
1.1 Software features 5
1.1.1 Multi-rack application with a non redundant Main Rack 6
1.1.2 Multi-rack application with a redundant Main Rack (Master and Backup) 7
2. DIRECT PROCESS INTERFACE 8
2.1 Input Check 8
2.2 Output check 8
2.3 Time tagging 8
3. MICOM C264/C264C MANAGEMENT 9
3.1 Operating mode management 9
3.1.1 Definitions 9
3.1.2 Initialisation mode 9
3.1.3 Operational mode 10
3.1.4 Maintenance mode 11
3.1.5 Test mode 11
3.1.6 Faulty mode 12
3.1.7 Halt mode 12
3.1.8 Redundancy Mode management 12
3.2 Database management 13
3.3 Self tests 14
3.4 Time management 14
3.4.1 External clock 14
3.4.2 Clock message from a SCADA gateway 14
3.4.3 Time set by an operator 14
4. COMMUNICATIONS 15
4.1 Telecontrol bus 15
4.2 Legacy bus 16
5. DIRECT PROCESS ACCESS 17
5.1 Digital input acquisition (DI) 17
5.1.1 Acquisition 17
5.1.2 Debouncing and filtering 17
5.1.3 Toggling 18
5.2 Counters acquisition (CT) 18
5.2.1 Single counter (SCT) 18
5.2.2 Double counter (DCT) 19
C264R/EN FT/C11 Functional Description
Page 2/46
MiCOM C264-R
5.3 Digital measurement (DM) 19
5.3.1 Acquisition without Read Inhibit signal 20
5.3.2 Acquisition with Read Inhibit signal 21
5.3.3 Encoding 21
5.4 Analogue input acquisition (AI) 22
5.4.1 Input range 22
5.4.2 Acquisition cycle 22
5.5 Digital outputs (DO) 22
5.6 Digital Setpoints 22
5.6.1 Encoding 22
5.6.2 Read Inhibit 23
5.7 Analog Setpoints 23
5.7.1 Output range 23
5.7.2 Output management 23
5.7.3 AOU Watchdog management 24
6. DATA PROCESSING 25
6.1 Binary Input Processing 25
6.1.1 Binary Input Definition 25
6.1.2 Processing of Single Point Status 25
6.1.3 Processing of Double Point Status 26
6.1.4 Group processing 27
6.1.5 SBMC Mode Processing 27
6.2 Measurement Input Processing 27
6.2.1 Analogue processing 27
6.2.2 Digital Measurement Processing 28
6.3 Accumulator Input Processing 28
7. CONTROL SEQUENCES 29
7.1 Kind of control sequences 29
7.2 Control sequences checks 29
7.2.1 Mode Management 29
7.2.2 IED connected 29
7.2.3 Control mode 30
7.2.4 Uniqueness of control 30
7.2.5 Inter-control delay 30
7.2.6 Status of the device 30
8. USER INTERFACE 31
8.1 Front Panel 31
8.1.1 Local Control Display 32
8.1.2 Local/Remote push-button 32
8.2 Computer Maintenance Tool 32
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 3/46
8.3 Printer 33
8.3.1 Inputs 33
8.3.2 Outputs 33
8.3.3 Printer management 34
9. RECORDS 36
9.1 Permanent records storage 36
9.1.1 Data storage 36
9.1.2 Waveform Recording 36
9.1.3 Events 37
10. AUTOMATIONS 38
10.1 Load Shedding 38
10.1.1 Inputs 38
10.1.2 Algorithm 39
10.1.3 Outputs 40
10.1.4 Hypothesis & Constraints 41
10.1.5 Configurable data 42
10.2 Load Curtailment 42
10.2.1 Inputs 43
10.2.2 Algorithm 43
10.2.3 Outputs 44
10.2.4 Hypothesis & Constraints 45
10.2.5 Configurable data 45
C264R/EN FT/C11 Functional Description
Page 4/46
MiCOM C264-R
BLANK PAGE
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 5/46
1. SCOPE OF THE DOCUMENT
This document is a chapter of MiCOM C264/C264C documentation binders. It is the
functional description of this computer. The hardware description is defined in HW
(Hardware) chapter and all connection diagrams in chapter CO. The product capabilities,
performances, environmental limits are grouped in TD (Technical Data) chapter.
1.1 Software features
The MiCOM C264/C264C computers belong to the new range of modular product at
hardware, software and functional levels. All functions are fully configurable following
customer needs and requirements. MiCOM C264/C264C computers assume:
Direct Process interface through DIs, DOs and AIs, A0s boards
Direct operator interface
Embedded parameterised control of all common plant or device
High communication abilities to IED, Ethernet, and RTU
Events, measurement display, printing and archiving
Enhanced inner management with databases handling, self-test controls and
synchronisation means
The components of the software management are:
Inputs/Outputs board (DI, DO, AI, AO)
Communications with Tbus and LBus (see chapter Communication)
RTC (Real Time Clock), time management; synchronisation, time tagging (see Time
management chapter)
Communication with peripherals such as:
Local Operator Interface (LCD, front panel)
Local Printer (local sequence of events - SOE)
Depending on whether the Main Rack is redundant or not, the software features are
different.
C264R/EN FT/C11 Functional Description
Page 6/46
MiCOM C264-R
1.1.1 Multi-rack application with a non redundant Main Rack
Main Rack
SCADA
C0238ENa
link
T101 or T104
Secondary Rack
Acquisition
I/O
C264C
C264
IED Link
Secondary Rack
Acquisition
I/O
C264
IED Link
I/O
IED Link
FIGURE 1 : SOFTWARE FEATURES IN MULTIRACK NON REDUNDANT APPLICATION
The role of the main rack is to centralise all information acquired by all racks, and to manage
the SCADA interface.
The main rack (when it is not redundant) manages direct acquisitions, controls, and the IED
communication.
The functions done by the main rack are:
manage the communication with the SCADA
receive all information acquired on secondary rack and update the archives (SOE
waveform)
Transmission via the SCADA interface of all information acquired on secondary rack.
Manage the database downloading. Reception through the SCADA link and
distribution of the new configuration on all other racks.
Manage the control received through the active SCADA link, dispatch it on the racks.
Manage the digital input and measurement acquisition. (Not available in case of main
racks redundancy)
Manage the control, which is directly handled by the main rack. (Not available in case
of main racks redundancy)
Manage the IED communication, and real time data acquisition. (Not available in case
of main racks redundancy)
The functions done by the secondary racks are:
Send all acquired data to the main rack
Manage the control received from the master rack
Manage the digital and measurement acquisition.
Manage the IED communication, and real time data acquisition.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 7/46
1.1.2 Multi-rack application with a redundant Main Rack (Master and Backup)
C0239ENa
Main Rack
Master
SCADA link
T101 or T104
Secondary Rack
Acquisition
I/O
C264C
C264
IED Link
Main Rack
Backup
C264C
Secondary Rack
Acquisition
I/O
C264
IED Link
SCADA link
T101 or T104
FIGURE 2 : SOFTWARE FEATURES IN MULTIRACK REDUNDANT APPLICATION
The role of the main racks (Master and backup) is to centralise all information acquired by
the secondary racks, and to manage the SCADA interface.
In this case, no I/O boards are to be installed in the main racks and no IEDs are to be
connected to their serial ports.
Role of the master main rack:
manage the communication with the SCADA
receive all information acquired on secondary rack and update the archives (SOE
waveform)
Transmission via the SCADA interface of all information acquired on secondary rack.
Manage the database downloading. Reception through the SCADA link and
distribution of the new configuration on all other racks (including the main rack
backup)
Manage the control received through the active SCADA link
Role of the backup main rack:
Receive all information acquired on the secondary rack and update the archives (SOE
waveform)
Freeze all transmission on the SCADA link (Reset of the Link: Function 0)
Become the master main rack in case of SCADA General Interrogation (GI Request)
received on its line.
Receive and update the configuration database received by the master main rack
through the active SCADA link
To communicate to the SCADA the status of main racks (master and backup) the
watchdog relays could be wired to standard DI of one secondary rack.
C264R/EN FT/C11 Functional Description
Page 8/46
MiCOM C264-R
2. DIRECT PROCESS INTERFACE
Several kind of boards can be used in MiCOM C264/C264C. Digital Input & Outputs,
Measurement acquisitions are checked to validate information/action and time tagged on any
change of state or value.
2.1 Input Check
Input data coming from the physical MiCOM C264 boards or from the different
communication networks are periodically checked.
Invalidity status of these data is internally fixed for:
Self-test (DI, AI, board self test failure),
Unknown (DI, AI, communication failure to remote acquisition like IED)
Toggling (DI, X change of state in given time)
Over-range (AI, saturation of its transducer, or Counter value reaching limits)
Open Circuit (AI kind 4-20 mA with current value under 4mA)
Undefined (Digital Measurement or Counter with invalid DI coding)
2.2 Output check
Digital Output boards are periodically checked at their logical level. In the event of a logical
circuit test fail the board is set faulty, controls on this board or upon disconnected IEDs are
refused.
2.3 Time tagging
All physical input data are time tagged at 1 ms accuracy. All internal logic data are time
stamped at 1 ms accuracy.
Analogues acquisition time tagging is done but driven by periodic polling of this kind of
board. Periods are based on multiple of 100ms.
Information coming from IED are time tagged by IED itself if it has this facility otherwise it is
performed at C264 level when receiving the data.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 9/46
3. MiCOM C264/C264C MANAGEMENT
The computer manages its own mode, configuration (Databases), and time.
3.1 Operating mode management
3.1.1 Definitions
The terms defined below are used in this whole section 3.
Anomaly: an anomaly is a fault causing a downgraded behaviour of the computer.
There are hardware and/or software anomalies:
Board failure
Loss of synchronisation
Loss of communication
Software fault : A software fault results of a major software error. In this case the
computers enters the Faulty mode.
Vital harware fault: a vital hardware fault is a fault causing a software halt. This kind
of fault causes the computer to stop the application software.
CPU fault
Power supply fault
Bus fault
Permanent Interruption fault
3.1.2 Initialisation mode
After power on or manual reset the computer enters the initialisation mode and performs
different types of checks:
Vital hardware tests
Flash memory test: in case of a problem the computer tries to repair the flash memory.
If a vital hardware test fails, the initialisation is stopped and the computer enters the
halt mode.
Non vital hardware tests
Non-vital hardware tests are only performed on present boards:
Inputs and outputs boards:
To determinate the number and the type of the present input and output
boards
To check the presence of the previously input and output boards and to be
informed if a board is absent
To check the good working order of the present input and output boards and
to be informed if a board is out of order
Communication boards: this test is performed within the communication protocol.
Display (LCD, LEDs): the single test that can be done is the presence of the HMI
board.
Peripheral devices (printer, external clock ..). Check of the presence of the
devices by use of timeouts.
If any of these non-vital hardware tests fails the computer enters the
operational/downgraded mode depending on the type of the fault.
C264R/EN FT/C11 Functional Description
Page 10/46
MiCOM C264-R
Software tests (database coherency tests)
These tests are performed at each restart of the computer. The checks of the
database guarantees that the database is compatible with the hardware and the
software of the computer and that it does not contain incoherent data of configuration.
The following checks are performed:
Check of the presence of a database
Check of the DB/ software compatibility
This control makes it possible to check that the software and the database are
coherent. The software contains in its static data a version and a revision
number indicating which structure of database it is able to interpret. The
database must have the same version to be accepted.
Check of the DB/ equipment compatibility
This control makes it possible to check that the database is intended for the
equipment on which it was downloaded. To check it, the type and the number of
equipment contained in the heading of the database are compared with the type
and the number of equipment contained in the static data of the software.
Check of the validity of the data of the database
This control checks that the configured inputs and outputs are present and that
the number of objects (bays, digital inputs ) remains within acceptable limits.
If any of these checks fails, the computer enters the maintenance mode.
3.1.3 Operational mode
This mode can be divided into two sub-modes : Normal mode or Downgraded mode
3.1.3.1 Normal mode
This is the nominal operating mode of the active computer. In this mode the watchdog relay
is activated and all the functionalities of the computer are available. Nevertheless, detection
of an error can lead to the downgraded mode, to the faulty mode or to the halt mode,
depending of the nature and the gravity of the failure.
From this mode a transition to the maintenance mode can be requested by an operator from
local HMI.
From this mode a transition to the test mode can be requested by an operator from local
HMI.
This mode is transmitted to local HMI and upper level (RCP).
In this mode the operator can manage the database:
Download a database
Swap the databases (this lead to a Computer reboot)
Display database information
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 11/46
3.1.3.2 Downgraded mode
This mode is entered in case of an anomaly. In this mode the general working of the
computer is not very disturbed because it involves the degradation of only few functions. The
watchdog relay is activated.
The downgraded mode depends on the hardware configuration of the computer. But we can
define the different kinds of downgraded modes that can happen:
operation without DO on a board
operation without DI on a board
operation without AI on a board
operation without AO on a board
operation without communication with some relays
operation without communication with some station devices
a combination of 2, or more, previous items
When the cause(s) of the transition into downgraded mode disappear(s), the computer
returns to the normal mode.
3.1.4 Maintenance mode
In maintenance mode, communication on the station bus is operational in order to manage
the database. This mode is displayed on local HMI (led and LCD) and on upper level.
The watchdog relay is de-activated.
In this mode the operator can manage the database:
Download a database
Swap the databases (this lead to a Computer reboot)
Display database information
From this mode a transition to the operational mode can be requested by an operator from
local HMI.
3.1.5 Test mode
In Test mode, the computer works normally but output relays are not activated. This mode is
entered on operator request in order to simulate the functioning of distributed automatisms
such as interlocking. Instead of activating the output relays, the computer indicates a Ack
OK message to the Local HMI if the command is valid otherwise a KO message.
Note: To realise the tests, the operator has to manually create the testing conditions by
forcing BI or Measurements on different computers. Once the conditions are realised, he can
generate a command and see at the local HMI if the result corresponds to the expected one.
This mode is displayed on local HMI (led and LCD) and can be sent to the upper level
(RCP).
From this mode a transition to the operational or maintenance mode can be requested by
an operator from local HMI.
C264R/EN FT/C11 Functional Description
Page 12/46
MiCOM C264-R
3.1.6 Faulty mode
The Faulty mode is entered when a fault, that prevents the exploitation, happens. This mode
can be entered from any mode described above.
This mode is also entered when a failure is detected on DO boards and if the configuration
allows this mode on DO faults.
The only way to leave this mode is an automatic reset or a transition to the Halt mode. Each
time the computer enters this mode, an internal counter is incremented. As long as the value
of this counter is lower than Max_Fault (parameter defined during the configuration step) the
Initialisation mode is entered. The value of this counter is automatically reset when the
lasted time since the last incrementation of the counter reaches the value
Fault_Detection_Lasting ( parameter defined during the configuration step). When the value
of this counter reaches Max_Fault the computer enters the Halt mode.
3.1.7 Halt mode
In this mode the computer doesnt operate anymore. The watchdog relay and all the outputs
relays are deactivated. The only way to get out of this mode is to operate a manual reset.
The following figure summarises the different operating modes of the computer and the
transitions.
FAULTY
automatic
reset
manual reset
HALT
TEST
simulation request
end of simulation
major hardware fault
or software fault
OPERATIONAL MAINTENANCE
INITIALISATION
Init OK
hardware test OK
and coherency not OK
maintenance request
active request
boot
major hardware fault
or software fault
no DB
vital hardware
fault
vital hardware fault
Major
hardware
fault
Counter of faults = Max_Fault
vital hardware fault
vital
hardware
fault
DB/software compatibility not OK
or
DB/equipment compatibility not OK
or
data of database not valid
C0288ENa
3.1.8 Redundancy Mode management
Main rack redundancy is managed using two identical computers with the same hardware.
The SCADA links supported by the both main racks are totally independent. On this two links
we have no protocol synchronisation, and each of these could have different station address.
The principle is different than a standard redundant lines functionality, where the messages
sequence on the both lines are synchronised and where each line has the same station
address.
On the redundant configuration the master racks do not manage direct acquisitions or
controls, or IED connection.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 13/46
They have a single address on one of the two SCADA links. This allows handling two
different networks.
The master rack is eligible on the following conditions:
The communication has been set-up on its link. The message used to confirm the set-
up of the link is the GI request (ASDU 100).
The previous rules could be presented on the automation schema below:
C0250ENa
MR1
BACKUP
MR2
BACKUP
GI received on MR1
MR1
MASTER
MR2
BACKUP
MR1
BACKUP
MR2
MASTER
GI received on MR2
GI Received on MR2
GI Received on MR1
STARTING
STATE
RUNNING
STATE 1
RUNNING
STATE 2
MASTER/BACKUP MAIN RACKS
ELIGIBILITY
MR1 : Main Rack 1
MR2 : Main Rack 2
3.2 Database management
The MiCOM C264 uses structured databases for data management. Databases are
generated and versioned by PACiS SCT (Standalone Configuration Tool).
Computer stores 2 different databases, the current (used in real time) and a standby with
different database versions. A standby database can be downloaded even if computer is
operational using the SCADA interface (T101, T104) or PACiS CMT (Computer Maintenance
Tool) which is connected to the Master Main Rack. A switch database control from the
SCADA interface or CMT allows changing of the current database. The computer will restart
to take into account the new structured data. A fundamental principle is that the computer
can only work with an other PACIS equipment if their current database versions are identical.
Download of database from CMT is generally used only for first database download.
Be careful, the master main rack checks the compatibility between its database and other
racks:
If the databases differ, the database is deleted on the involved rack.
If master database is compatible with the standby database on the other rack, the database
will be switched.
From CMT, the database is dispatched to other racks (including the backup main
rack).during download. This database becomes the new Standby database. On Switch
command, the switch is cascaded to other racks.
From SCADA, the database file received is saved in RAM, but is not dispatched to other
racks (including the backup main rack).
This database did not appear as a new Standby database in different panels.
From the SCADA the switch command is sent via the Reset process command standard
message (ASDU 105). This command can only be used for a database switch after a
database download.
On Switch command reception, the database is successively dowloaded in other racks
(including the backup main rack) and switched.
C264R/EN FT/C11 Functional Description
Page 14/46
MiCOM C264-R
C0252ENa
Main Rack
Master
SCADA link
T101 or T104
Secondary Rack
Acquisition
I/O
C264C
C264
IED Link
Main Rack
Backup
Secondary Rack
Acquisition
I/O
C264
IED Link
SCADA link
T101 or T104
Binary configuration file
Compressed ADB
Internal DB
Internal DB
C264C
3.3 Self tests
Computer makes self-checks:
Hardware (hardware fault) at start-up and cyclically.
Software (software fault) cyclically to check that software tasks are alive and not take
all the CPU time.
Database coherency at start-up.
Acquisition and output at start-up and cyclically.
3.4 Time management
The computer Real Time Clock has small drift per day, therefore the operator should set its
time periodically or it should be synchronised to a master clock.
Time synchronisation of a main rack computer can be done by two means:
IRIG-B signal
Clock message from a SCADA gateway (T-Bus)
When computer is synchronised all events and measurement have a time tag with
synchronised attribute. If synchronisation is lost, or has never been received attributes
indicates that time tag is not synchronised.
The time management organisation is based on the following principe:
only the main racks can be synchronised from IRIG-B or from SCADA.
the secondary racks can be synchronised by the both main racks according to the
following priority level:
1: IRIG-B
2: Master Rack
3: Backup Rack
3.4.1 External clock
The external clock device receives the synchronisation signal through several possible
protocols (GPS, DCF77, etc) and then sent to the MiCOM C264/C264C using IRIG-B
standard. A specific input is dedicated for this application.
3.4.2 Clock message from a SCADA gateway
SCADA clock synchronisation depends on protocol. The synchronisation message is directly
acquires by the MiCOM C264/C264C through the SCADA link.
3.4.3 Time set by an operator
The user may set time and date directly using the MiCOM C264/C264C local Operator
Interface or the CMT tool.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 15/46
4. COMMUNICATIONS
MiCOM C264/ C264C ensure up to three different type of communications:
Telecontrol Bus (T-Bus),
Legacy Bus (L-Bus).
Main characteristics are given below. Furthermore details on the S BUS protocol
implementation for MiCOM C264 is given.
C0005ENb
Computer Kernel
Telecontrol
Interface
UCA2
T-BUS S-BUS
RTU, SCADA PACiS System, UCA2 IED
I/O boards Legacy Gateway
L-Bus
IED
FIGURE 3 : COMMUNICATIONS
4.1 Telecontrol bus
The available slave protocols are:
IEC 60870-5-101 (T101),
IEC 60870-5-104 (T104),
MiCOM C264/C264C behaves as a slave into master/slave protocol (T101) or balanced
protocol (T101, T104).
The connection with SCADA is direct or via modem.
Physical layer:
T101: RS232, RS422, RS485
T104: Ethernet 10 or 100 Mb/s: RJ45 connector or optical fibre (multimode or
monomode)
Up to two protocols can be configured, same protocol or not, with or without redundant
channels. The C264 computers have up to four serial ports.
Warning : When using the CPU boards serial ports, the baudrate must be the same on both
of the CPU serial ports (COM3 and COM4).
The redundancy is not available for T104.
C264R/EN FT/C11 Functional Description
Page 16/46
MiCOM C264-R
4.2 Legacy bus
MiCOM C264/C264C behaves as a master.
Protocols:
IEC 60870-5-103 (T103),
IEC 60870-5-101 (T101),
ModBus
Devices connected to: IEDs
Physical layer:
RS232, RS422, RS485
Optical fibre
Up to four serial ports are available to make four networks with different protocols or not.
For T103 and Modbus, a tunnelling mode is available. This allows a setting software running
on a personal computer to access the IEDs through the C264.
WARNING : - WHEN USING THE CPU BOARDS SERIAL PORTS, THE BAUDRATE
MUST BE THE SAME ON BOTH OF THE CPU SERIAL PORTS (COM3 AND COM4).
- THERE IS NO LEGACY BUS ON THE MAIN RACK WHEN IT IS
REDUNDANT.
- THE LEGACY BUSES ARE NOT REDUNDED.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 17/46
5. DIRECT PROCESS ACCESS
The MiCOM C264/C264C acquires digital and analogue input, counters, digital
measurements. Configuration parameters, filtering and triggering are applied to these inputs
and depend on their type.
5.1 Digital input acquisition (DI)
5.1.1 Acquisition
Acquisition of binary information is done via DIU200 (16 DIs) or CCU200 (8 DIs+4 DOs)
boards:
C0126ENa
Hardware
acquisition
Time
stamping
Software
acquisition
Debouncing &
Filtering for BI
Debouncing &
Filtering for
DM
Debouncing &
Filtering for
counters
Toggle
Filtering for
BI
Special
treatment
for DM
Special
treatment
for
counters
To BI
treatment
To measurements
treatment
To counters
treatment
5.1.2 Debouncing and filtering
A filtering is applied on digital inputs as follow:
C0127ENa
Filtering time
t
0 t
1
t
2
Debouncing
time
t
0
is the instant of detection of the first transition. t
1
is the instant of validation of the change of
state. t
2
is the end of the filtering. (the signal has remained stable from t
1
to t
2
). The change of
state is time stamped at t
0 .
A value of 0 means that no filter is applied : a change of state is validated as soon as it is
detected.
Three couple of delays (deboucing / filtering) are defined :
one for all DI which will be used as BI
one for all DI which will be used as DM
one for all DI which will be used as counters
C264R/EN FT/C11 Functional Description
Page 18/46
MiCOM C264-R
5.1.3 Toggling
A digital input is said to be toggling if its state has changed more than N times in a given
period of time T
1
.
A toggling DI returns in the normal state if its state has not changed within another period of
time T
2
.
N, T
1
and T
2
are parameters determined at configuration time on a per system basis (same
parameters for all MiCOM computers of a system).
The toggle filtering applies only on DI that will be used as BI (there is no toggle filtering on DI
that will be used for counters or DM).
5.2 Counters acquisition (CT)
The counters are acquired on the same boards as the DIs. There are two types of counters
SCT (Single counter) and DCT (Double counters).
This interface allows acquisitions of pulses delivered from energy metering devices
corresponding to a calibrated quantity of energy.
Each valid pulse increments the value of an accumulator used to compute the quantity of
energy delivered during a given period.
Counter values are stored in static memory (secured with a capacitor, > 48h autonomy) ; The
counters are kept for more than 48H when the C264 power supply is off.
The pulse frequency should be 20 Hz as a maximum. So, the debouncing and filtering
values must be chosen in consequence.
5.2.1 Single counter (SCT)
A SCT is acquired on a single contact.
The value of the accumulator is incremented after a low to high transition, confirmed after a
filtering time (T
count
). T
count
is defined for the whole system, with a step of 5 ms : the chosen
value must be coherent with the pulse frequency (i.e. all counters of a system use the same
T
count
).
A subsequent pulse can be taken into account only after a high to low transition.
C0128ENa
T
count T
count
Low to high transition
Transition discarded
Low to high transition
Transition validated,
counter is incremented
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 19/46
5.2.2 Double counter (DCT)
A double counter is acquired on two contacts. One is called the true contact (TC), the other
is the complemented contact (CC). Normally these contacts should have complementary
states.
Pulses are detected in the same manner as for SCT, on the TC variations, using the T
count
delay (the same T
count
value is used for SCT and DCT).
A subsequent pulse can be taken into account only after a high to low transition on TC (and
so a low to high transition on CC).
The difference is that both contacts should be in opposite states for transitions to be
detected and validated. The counter is invalid if it exists a non-complementarity between the
2 contacts during a delay T
def
. This delay is defined for the whole system (i.e. all DCT use the
same delay).
C0129ENa
T
count T
count
Low to high transition
Low to high transition
Transition discarded, and
high to low transition
Transition validated,
counter is incremented
Non-complementarity
confirmed, counter is invalid
Detection of non-complementarity
TC
CC
T
def
Low to high transition, but no
validated high to low transition
before -> T
count
is not launched
5.3 Digital measurement (DM)
The digital measurements (DM) are derived from the Digital Inputs. They are acquired on the
same boards as the DIs.
This interface, allowing acquisitions of a digital measurement, is a digital value coded on N
wired inputs. Each wired input represents a bit of the value, and can take only one of two
values: low or high.
Digital Measurements are used to process the measurements and tap position
indications.
A Digital Measurement can be associated to a Read Inhibit (RI) signal. The acquisition
process is different depending of the presence of this signal.
C264R/EN FT/C11 Functional Description
Page 20/46
MiCOM C264-R
5.3.1 Acquisition without Read Inhibit signal
The DM is calculated at each change of state of one of its bits.
A stability processing is applied at each calculation to confirm the value :
if the difference between the current value and the previous confirmed value is less or equal
than V
stab
(value defined in configuration), then the current value is confirmed
if the difference is greater than V
stab
, then the T
stab
delay is launched (value defined in
configuration, from 0 to 60s, with a 10 ms step). If a T
stab
delay is already launched, this one
is cancelled. At the end of the delay, the DM value is confirmed.
C0130ENa
Confirmed
DM value
Bit change => new
calculation
V
stab
=> confirmed
DM value
Confirmed
DM value
Bit change =>
new calculation
>V
stab
=> T
stab
launched
T
stab
Bit change =>
new calculation
>V
stab
=> T
stab
re-launched
T
stab
Confirmed
DM value
Note : = |confirmed DM value new calculation|
Furthermore, an invalidity processing is applied : at the first change of state of one bit
following a confirmed DM value, the T
Inv
delay is launched (value defined in configuration,
from 0 to 300s, with a 10 ms step). If the value is not confirmed at the end of this delay, the
DM is declared UNDEFINED.
C0131ENa
Confirmed
DM value
Bit change =>
new calculation
>V
stab
=> T
stab
launched
T
stab
Bit change =>
new calculation new calculation
>V
stab
=> T
stab
re-launched
T
stab
DM UNDEFINED
T
Inv
Bit change =>
>V
stab
=> T
stab
re-launched
T
stab
If V
stab
is equal to 0, there is no stability processing : all DM values are sent at each
calculation.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 21/46
5.3.2 Acquisition with Read Inhibit signal
When the RI signal changes to set state, the T
inh
delay is launched. If the signal is always set
at the end of the delay, the DM is declared UNDEFINED. Otherwise, if the RI signal changes
to reset state before the end of the delay, the current DM value is transmitted.
C0132ENa
T
inh
RI
DM value transmitted
T
inh
DM UNDEFINED
If the RI signal is invalid, the DM will be invalid.
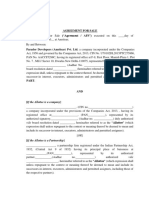
5.3.3 Encoding
The following code are allowed for DM :
CODE Number of bits Range of value
4 (1 BCD decade) 0 to 9
8 (2 BCD decades) 0 to 99
12 (3 BCD decades) 0 to 999
BCD
16 (4 BCD decades) 0 to 9999
4 0 to 15
7 0 to 127
8 0 to 255
12 0 to 4095
Binary
16 0 to 65535
8 0 to 255 Gray
16 0 to 65535
Decimal 16 (1 bit among 6 for the tens, 1
among 10 for the unit)
0 to 69
1 among N 2
to 32
0 to 2
to 0 to 32
One supplementary bit can be used for the sign (0 indicates a positive value, 1 indicates a
negative value).
Capability extension for the Tap Position Indication only :
CODE Number of bits Range of value
1 among N 2
to 64
0 to 2
to 0 to 64
C264R/EN FT/C11 Functional Description
Page 22/46
MiCOM C264-R
5.4 Analogue input acquisition (AI)
Acquisition of voltage or current DC signals is done via AIU201 (4 Ais) or AIU210 (8 Ais)
boards.
5.4.1 Input range
The different input range are:
For voltage inputs (AIU201 only) : 10 V, 5 V, 2.5 V, 1.25 V
For current inputs : 0 - 1 mA, 1 mA, 0 - 5 mA, 5 mA, 0 - 10 mA, 10 mA, 4 - 20 mA,
0 - 20 mA, 20 mA
The saturation value depends on the selected range.
5.4.2 Acquisition cycle
The analogue inputs are acquired on a periodical basis (short or long cycle, defined in
configuration).
5.5 Digital outputs (DO)
Two types of Digital Outputs are available into MiCOM C264:
CCU200 boards for controls (8 DIs+4 normal open DOs), this board allows double
pole switching controls.
DOU200 boards for alarms (8 normal open DOs + 2 normal open/normal close DOs).
5.6 Digital Setpoints
Digital setpoints are digital values sent on multiple parallel wired outputs. Each wired output
represents a bit of the value. Digital setpoints are used to send instruction values to the
process or to auxiliary devices.
The Digital Setpoints are processed on the same boards as the Digital Outputs. The Digital
Outputs characteristics described above apply on Digital Setpoints. Nevertheless, only
standard DO boards with single pole N/O relays can be used.
5.6.1 Encoding
The following codes are allowed:
CODE Number of bits Range of value
4 (1 BCD decade) 0 to 9
8 (2 BCD decades) 0 to 99
12 (3 BCD decades) 0 to 999
BCD
16 (4 BCD decades) 0 to 9999
4 0 to 15
7 0 to 127
8 0 to 255
12 0 to 4095
Binary
16 0 to 65535
8 0 to 255 Gray
16 0 to 65535
Decimal 16 (1 bit among 6 for the tens, 1
among 10 for the unit)
0 to 69
1 among N 2
to 48
0 to 2
to 0 to 48
Moreover a supplementary bit can be used for the sign (0 indicates a positive value, 1
indicates a negative value).
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 23/46
5.6.2 Read Inhibit
A dedicated binary output can be used to allow or forbid the reading of the value by the
external device.
There is one (or none) Read Inhibit (RI) output per value.
If the RI output is a logical one (external polarity applied), the reading is permitted.
The procedure used to output a value with a RI output is:
Reset the RI output to a logical 0: read forbidden.
Wait for N ms
Output the value
Wait for N ms
Set the RI output to a logical 1: read permitted.
The 0 to 1 transition on the RI output can be used by the external device as a trigger,
indicating that a new value is available.
5.7 Analog Setpoints
Analog setpoints are measurement values sent on the Analog Output board.
Thes setpoints commands (with analog indication) are received from the Remote Control
Point ( RCP) or from the local HMI ( with LCD).
Analog Setpoints are used to interface auxiliary devices requiring analog inputs (ex :
measurement viewers, Generator)
The Analog output values are secured with an external power supply which allows keeping
the analog output value in case of C264 shutdown or power off.
A quality indication is available with the additional Read Inhibit output relays (NO) associated
to each analog output.
5.7.1 Output range
The various Analog output range in currents are:
5 mA, 0 - 5 mA,
10 mA, 0 - 10 mA,
4 - 20 mA, 0 - 20 mA, 20 mA
5.7.2 Output management
Each current output is individually managed in 2 modes:
Maintained mode: in case of computer shut down or power off, the output level is
maintained (and the Read inhibit relay is set). Only the reception of a new setpoint will
lead to an output value modification.
Un-maintained Mode : in case of computer shut down or power off, the output is set
to 0.
The Analog Output is stable 100ms after the order. During the Analog output value
modification, the Read Inhibit relay is reset (Open) and indicates that the analog output
value is not to be used.
C264R/EN FT/C11 Functional Description
Page 24/46
MiCOM C264-R
Analog
Output
RI relay
status
100 ms
Output value modification Stable Stable
10ms 10ms
Set
Reset
C0289ENa
5.7.3 AOU Watchdog management
The AOU board is monitored and the AOU Watchdog (NO relay) is reset when :
the external power supply is off
the C264 is not operational or powered off (no communication with the CPU board)
an AOU internal fault is present
Otherwise, the analog output function is valid, the AOU watchdog relay is set.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 25/46
6. DATA PROCESSING
MiCOM C264/C264C treatment entries can be Binary Inputs or Analogue Inputs. They are
issues from
IOs boards,
MiCOM C264/C264C internal information (System Input, automation)
Communication acquisition (IED or other computer from LBUS)
6.1 Binary Input Processing
6.1.1 Binary Input Definition
The five types of Binary Inputs (BI) are:
Single Point (SP): derived from one BI
Double Point (DP): derived from two BIs
System Input (SI): information related to the system, to configurable and built-in
automations or to electrical process but without acquisition possibilities
Group: logical combination of BIs
SP and DP are acquired via digital input boards or via IEDs connected by a serial link.
After the acquisition on digital inputs boards, the computer performs toggle filtering, this
avoids to load the computer itself or other equipment when an input has an hazardous
behaviour (More than N state changes during a given duration).
6.1.2 Processing of Single Point Status
C0290ENa
Toggle
filtering
Persistance
filtering
Group
processing
Manual
suppression
Substitution
Forcing
From
acquisition
Transmission
Data Logging
Archiving
From IED
IED
inputs
System
Inputs
DI/DO
association
A preliminary treatment (filtering) is applied to specific Single Points (SP) in order to confirm
the state.
The choice of these SPs and the filtering time are fixed by the MiCOM C264/C264C
configuration. If the opposite transition occurs before this delay, both transitions are
discarded.
This treatment is said to be a persistent filtering.
The status is stamped with the time of the transition.
C264R/EN FT/C11 Functional Description
Page 26/46
MiCOM C264-R
The SP resulting states are:
States (Report)
RESET 01
SET 10
TOGGLING 11
SELFCHECK FAULTY 11
UNKNOWN 11
6.1.3 Processing of Double Point Status
C0291ENa
Toggle
filtering
Persistance
filtering
Motion
filtering
Group
processing
Manual
suppression
Substitution
Forcing
Open
contact
From
acquisition
Transmission
Data Logging
Archiving
From IED
IED
inputs
System
Inputs
DI/DO
association
Toggle
filtering
Close
contact
From
acquisition
DPS are commonly used for all switchgears position. From board valid acquisition the two
contacts are Close and Open (set by configuration when voltage is present). The position of
the switch is:
Close Contact Open Contact DPS State
0 0 Below motion delay, the state is valid motion. For
REPORT no transmission of the transitory state.
After Motion filtering, state is invalid JAMMED
0 1 OPEN
1 0 CLOSE
1 1 UNDEFINED after a permanent filtering
Preliminary treatments (filtering) for some DPs is applied to filter the MOTION state on a
certain period of time. This avoids the transmission of this (normally) transient state.
This treatment is said to be a motion filtering.
valid state (OPEN or CLOSE) is stamped with the time of the beginning of the
MOTION state
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 27/46
The DP resulting states are:
States (report)
JAMMED 11
MOTION 00
OPEN 10
CLOSE 01
UNDEFINED 11
TOGGLING 11
SELFCHECK FAULTY 11
UNKNOWN 11
6.1.4 Group processing
A group is a logical OR ,AND,NOR or NAND combination of Binary Inputs (BIs) or groups.
A group component can be a SP, DP (direct or via IED), SI, Group. A component can belong
to several groups.
A group is processed as a SP. It is time stamped with the date / time of the last data-point
which has modified the group status.
A group is calculated with filtered BIs (persistent filtering or motion filtering if configured).
Other computer BIs coming from reports.
6.1.5 SBMC Mode Processing
When a Bay is in SBMC mode (Site Based Maintenance Control), the status of the Binary
Inputs (associated to this Bay and defined as SBMC dependant), takes the forced state
defined in the configuration.
This forced information is delivered to the Remote Control Point (RCP) as long as the SBMC
mode is active on the Bay.
6.2 Measurement Input Processing
Measurement Values can be Analogue Measurement, or Digital Measurement. Analogue
Measurements are acquired from communication or from computer boards (AIU201 for DC).
Digital Measurement comes from Digital input boards.
6.2.1 Analogue processing
C0292ENa
Scaling
From digital
acquisition
From analogue
acquisition
From IED
acquisition
Thresholds
detection
Open Circuit
Management
Transmission
Data Logging
Archiving
Manual
suppression
Substitution
Forcing
C264R/EN FT/C11 Functional Description
Page 28/46
MiCOM C264-R
The Measurement resulting states, following the various filters, which can be applied, are:
States Meaning
VALID
SELFCHECK FAULTY AI, DI board fault
UNKNOWN MV is acquired via a transmission link, and the link is
disconnected
SATURATED MV is beyond its nominal input range
UNDEFINED MV is Digital Measurement with invalid coding or computation
on analogue leads to error
OPEN CIRCUIT MV is DC 4-20 mA with input value under 4mA
Measurement values can be transmitted at fixed period or on variation (% of nominal), and
anyway on state change. Periodic transmission is based on multiple of 100 (fast) or 500 ms
(slow).
6.2.2 Digital Measurement Processing
DM is measurement is derived from Digital input. They are used for process measures or
Tap indications.
The DM is UNDEFINED in the followings conditions:
The value is not stable.
BCD: a quartet is more than 9
Decimal: no bit is set or more than one for tens or unit
Two other bits can be used:
For read inhibit: in this case, the DM is acquired when the read inhibit bit is set.
For the sign
6.3 Accumulator Input Processing
The accumulator stores its current value in a static memory (secured with a capacitor, >48h
autonomy). At configured sample an accumulated value is extracted for inner computation
and transmission
Digital Inputs are used to count pulses. There is Single counter (SCT) based on one DI and
double counter based on 2 DI which count complementary states.
At processing level special persistent and complementary filters eliminate non-stable pulses.
The integer counter (also transmitted) can be scaled (among of energy of valid pulse).
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 29/46
7. CONTROL SEQUENCES
Control sequence is a basic built-in function on a module (switch, relay, and function). It
receives control order, sending back acknowledgement. After checks, control sequence send
control (protocol or DO), and check correct execution with feed back from protocol or from
DI.
7.1 Kind of control sequences
The control sequences automation receives three kind of input triggers (as order from higher
level) with selection, execution and unselection. Control order may have a normal or
abnormal termination with positive or negative acknowledgement to operator and to
communication.
By configuration, at PACiS SCE level a control sequence may be executed in one of the
following mode:
Direct execute: Execution
SBO once: Selection then Execution
SBO many: Selection, several Execution, until Unselection (for transformers only)
By configuration, each DPC order (close order or open order) and each SPC can activate
simultaneously two DO contacts.
7.2 Control sequences checks
Receiving control, the control sequence execute configured checks:
Operational conditions
MiCOM C264/C264C mode management (Operational, Test, Maintenance..),
IED connected
Substation control mode (Remote/Local),
Bay control mode
SBMC mode
Module conditions
Status of the device
Execution conditions
Delays upon selection feed back, start moving, final position reached
7.2.1 Mode Management
Control sequences are only performed if the computer mode is in operational mode. In test
mode, control sequences are allowed but digital outputs are not set.
7.2.2 IED connected
If a control has to be send to an IED, it is only accepted if this IED is connected to the
computer.
C264R/EN FT/C11 Functional Description
Page 30/46
MiCOM C264-R
7.2.3 Control mode
This control sequence receives requests from the various control points:
MiCOM C264 Local Control Display
MiCOM C264 TBUS communication from SCADA
Legacy BUS (from One Box Solution IED)
To avoid conflict between the control points, substation and bay modes are checked. Each
control sequence can be subject or not to these checks. The switches Remote/Local can be
hardware or software (saved in non-volatile memory).
The SBMC Site Based Maintenance Control allows controlling one specific bay from Local
Display even if substation is in remote. This feature is dedicated to commissioning or
maintenance and has also the possibility to filter data transmitted from the bay to SCADA.
7.2.4 Uniqueness of control
It is possible by configuration to prevent having more than one control at a time.
7.2.5 Inter-control delay
It is possible by configuration to define an inter-control delay that is a minimum delay
between two consecutive controls on the same device.
7.2.6 Status of the device
It is possible by configuration to prevent control is the status of the device is not valid.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 31/46
8. USER INTERFACE
MiCOM C264/C264C provides three user interfaces:
The front Panel
The Computer Maintenance Tool (CMT)
The Printer
8.1 Front Panel
The MiCOM C264/C264C front panel exists in two versions:
A simple FP with LEDs, L/R push-button and the serial link (GHU210 or GHU211)
A graphical FP with LEDs, L/R push-button, the Local Control Display and the serial
link (GHU200 or GHU201)
Key-pad
Local/Remote
push-button
RS 232 Serial port
Graphical
LCD
LEDs
C0020ENc
FIGURE 4 : MiCOM C264C FRONT PANEL (GHU200)
The FP is detachable up to 5 meters from the MiCOM C264/C264C base case using a
specific front panel (GHU220 or GHU221)
13 (for GHU20x) or 12 (for GHU21x) red LED are fully configured by PACIS SCT.
Inner function (Bay control running, synchronisation, mode..),
C264R/EN FT/C11 Functional Description
Page 32/46
MiCOM C264-R
8.1.1 Local Control Display
The Liquid Crystal Display has several kind of screen or panels split in two families protected
by 2 levels of password for action. The first set of panel has bay panels and lists.
Bay panels are graphical representation of an electric bay showing plant items, transformers,
and textual information needed to control the bay (measurements, bay mode).
Lists panels include events, measurements, and computer status
The second set of panel is called menu tree. It allows access to settings or suppression of
data point state/value.
The push buttons associated with the graphical LCD allow:
Navigate between screens or panels,
Select information
Enter value or string (including password)
Send Control (Bay Mode, switch gear, transformer )
8.1.2 Local/Remote push-button
The Local/Remote push button manage the MiCOM C264/C264C operation modes:
Local
Remote
When a control depends on bay mode, it is accepted from front panel when the bay is in
Local mode and from other control points when the bay is in Remote Mode.
Front serial Link
The Front panel RS232 serial link is located under the lower flap.
This serial link is dedicated for maintenance purpose to connect a PC with the MiCOM
C264/C264C maintenance software tools:
HyperTerminal
MiCOM S1 (setting IED on LBUS using tunnelling mode)
8.2 Computer Maintenance Tool
CMT is a graphical tool, it gives access to standard commands and secure the basic
maintenance interventions
CMT communicates with C264 on Ethernet in direct addressing mode.
CMT functions are:
Access to C264 software version and facility to download new software
Access to C264 databases versions and descriptions and facility to download and
switch new database
Access to boot parameters and facility to change them
Access to date and time and facility to change them
Access to Sequence Of Events file
Access to monitoring facilities
Access to Boards and IEDs Communication faults
Access to reports for digital and measurement information
Acess to Waveform file upload facilities.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 33/46
8.3 Printer
The events (the events to log are declared in the database) can be printed and
chronologically sorted on logbook printer. They are printed with their time stamping and a
complete description (location and event description).
One logbook printer can be connected to a computer. Some printout format parameters can
be defined by user during the system configuration phase.
8.3.1 Inputs
A computer receives acquisition from various equipment (protection, captors, etc.) and, after
processing, may generate events that have to be printed. These kinds of events are defined
in the database during the configuration phase.
Types of events can be :
Binary inputs (SP, DP, SI and Groups)
Tap position indication
Measurement
Operator action
Devices control
8.3.2 Outputs
The 5 following properties can be printed. Each property is separated from the other by one
blank character The position of each property in the printed line (i.e. position 1, 2, 3, 4 or 5)
is defined in configuration :
Chronology 1 character
TimeStamp 24 or 26 characters
Origin - 67 characters : for BI, TPI, measures, controls, the origin gives the access path to
the object
ObjectName - 16 characters
ObjectMessage - 16 characters
The Origin, ObjectName and ObjectMessage properties contain different information
depending of the associated event type.
C264R/EN FT/C11 Functional Description
Page 34/46
MiCOM C264-R
8.3.3 Printer management
8.3.3.1 Header & footer
A header and footer are printed at each page. They are composed of one line, separated
from the events by a blank line.
C0141ENa
Site Name Computer Name Date / Time
<blank line>
<blank line>
Page Number
<Log Book>
FIGURE 5 : PAGE FORMAT
The page number is in the range [1..999]. It is reset at 1 after reaching 999 and at each new
day.
The date could have the following format : DD/MM/YY or MM/DD/YY or YY/MM/DD or
DD/MM/YYYY or MM/DD/YYYY or YYYY/MM/DD. The time has the following format :
hh:mm:ss.
8.3.3.2 Chronology & time stamp
The printer is managed in a real-time printing mode.
All synchronised information is printed in a chronological order.
Events are printed with their time-stamping and a complete description (location and event
description). The equipment detecting the event does the time-stamping (time-stamping at
source).
8.3.3.3 Printer out of service
If a printer fails, all the messages are stored in a circular buffer.
When the buffer is full, any new message replaces the oldest one.
An indication (Printer status) is generated to indicate the printer failure.
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 35/46
8.3.3.4 Circular FIFO management
Before being printed, all information goes into a circular buffer
A latency delay is configured to sort information.
C0142ENa
Buffer Length
latency
Data flow Printers
FIGURE 6 : FIFO MANAGEMENT
The size of the buffer is 1000.
When the buffer is full, the oldest information are deleted (300 information suppressed) in
order to have place for new ones.
A specific message is inserted in the buffer to indicate the lost of information, this message
has the following information:
TimeStamp = date of the oldest suppress information
Origin = Name of the computer (configurable)
ObjectName = SUPPRESSED INFOS
ObjectMessage = number of lost information
C264R/EN FT/C11 Functional Description
Page 36/46
MiCOM C264-R
9. RECORDS
Several kinds of records are stored into MiCOM C264.
9.1 Permanent records storage
They are stored on flash disk.
9.1.1 Data storage
All parameters or settings that can be modified via front face LCD are stored in flash disk.
Lists of system information are also stored in the flash disk.
9.1.2 Waveform Recording
MiCOM C264/C264C provides
Slow wave form which gives access to RMS values
9.1.2.1 Slow Waveform Recording
The inputs for the slow waveform records are :
analogue values coming from AIU boards.
Digital inputs
Digital outputs
The slow wave form manages up to 24 analogue and 48 digital values.
MiCOM C264 stores at maximum 5000 integrated values as follow:
Number of Files Number of integrated values
1 5000
2 2500
5 1000
10 500
20 250
50 100
The integrated value has duration up to one hour. It is defined in configuration.
For analogue, the stored value is the average value during integrated period.
For digital, the stored value depends also on the average:
If average value > x then the stored value is 1 else it is 0, x is defined in configuration and it
is a value between 0.1 and 0.9.
The slow waveform recorder can be triggered by the following events, each of which is user
configurable :
Changes in state of binary inputs (SP, DP, SI)
Changes in state of digital outputs
Measurement threshold violations
Operator request
Periodically (i.e. every day at 00h00)
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 37/46
9.1.3 Events
All data change or events declared in MiCOM C264/C264C configuration database To be
logged are stored in a circular queue.
The event records are available for viewing either via the front panel LCD, via slave protocol
at SCADA level or on CMT equipment. They also can be printed.
Events , following MiCOM C264/C264C configuration, may typically contain the MiCOM
C264/C264C description, the date of the event and the time of the event with an accuracy of
1 ms, plus specific information regarding the causes of the events.
The MiCOM C264/C264C under the following circumstances may create events:
Changes of state of Binary Inputs (SP, DP, SI, Groups)
Changes of state of Measurements
Changes of state and value of Tap Position Indications
Devices Control actions and acknowledgements.
The size queue is:
200 data for front panel
2000 data for CMT
configurable per slave protocol for SCADA
C264R/EN FT/C11 Functional Description
Page 38/46
MiCOM C264-R
10. AUTOMATIONS
10.1 Load Shedding
LOAD SHEDDING
GROUP 1 GROUP 2 GROUP 3 GROUP 4
f1<
List1
control f3<
List3
control f2<
List2
control f4<
List4
control
LS On/Off control
Blocking condition x
setting
CBx status
Inter-group delay
Database (.adb)
blocking condition
information
CBx control
time-out
C0293ENa
LS On/Off Status
LS Group x status
LS CB x rejected by
LS CB x completed
LS CB x failed
List x Status
Blocking condition
x status
CBx open control
blocking condition
10.1.1 Inputs
f1<, f2<, f3<, f4< : digital inputs, coming from frequency relay. Each input is a
frequency threshold and is associated to a group
List1, List2, List3, List4 control : each list input is a set of three setpoints associated
to a group. These setpoints give the list of Circuit Breaker attached to a group. They
can be only received from the SCADA interface. ASDU 48 (setpoint normalised value)
is used for these setpoints.
LS On/Off Control : control (DPC type) which allows to set On or Off the Load
Shedding automation. This control can be received from the SCADA interface or from
the C264-R local HMI
Blocking condition x setting (1x6) : each blocking condition setting is a set of three
setpoints. These setpoints give the list of Circuit Breaker blocked by the condition x. It
can be only received from the SCADA interface. ASDU 48 (setpoint normalised value)
is used for these setpoints.
Blocking condition information : digital inputs which blocks the CB trip is set, according
to the CBx blocking condition setting. A maximum of 6 SPS / DPS can be defined as
blocking condition information
CBx status : status of each circuit breaker (Feedback of the CBx control)
Inter-group delay : delay between each group when several group are activated (i.e.
when CB of a group have to be tripped). This delay is defined in configuration and
settable through a setpoint (ASDU 48) which can be only received from the SCADA
interface. The delay is stored in non-volatile memory, but set to the value defined in
configuration in case of database switch.
CBx control time-out : one time-out per circuit breaker. For a circuit breaker, this time-
out defines the authorized delay between the CB control activation and the CB
position change. These time-out are defined in configuration thru SCT as the CB
controls Feedback time-out.
Database : C264-R database (.adb file), refer to 6.1.4
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 39/46
10.1.2 Algorithm
Group definition
At configuration time (with SCT), the operator defines the list of CB attached to each Load
Shedding group. The minimum number of CB in a group is 0, the maximum number is 40.
No more than 40 CB can be defined for the whole automation. The 40 CB which can be used
in load shedding function are tagged in configuration with a number from 1 to 40.
When the database is downloaded and switched, the load shedding automation takes into
account information described in the database (last setting sent by the SCADA is lost). The
Listx status information is updated and sent to the SCADA.
The assignment of CB to the groups is performed on-line through the SCADA interface,
whatever was the status of the automation (On or Off). Three setpoints are defined per
group, each value combination gives the allocation of a CB to the group as defined in the
table below :
Breaker Number /
setpoint 1
/ 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Breaker Number /
setpoint 2
/ 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Breaker Number /
setpoint 3
/ / / / / / 40 39 38 37 36 35 34 33 32 31
Bit 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Value
16384 8192 4096 2048 1024 512 256 128 64 32 16 8 4 2 1
If a CB is already assigned to an other group, it is automatically re-assigned to the new
group (a CB can be affected to only one group). After assignment, the Listx status
information for group(s) which has(have) been modified is sent to the SCADA.
During CB assignment (from the reception of the Listx control up to the sending of the Listx
status), the load shedding function cannot be started.
The group definition is saved in non-volatile memory and restored after a computer reboot. It
is erased in case of database switch.
Locally to the computer, assignments of CB to a group can be performed only through a
database download.
Blocking conditions
Up to 6 SPS / DPS can be defined as blocking condition : they are numbered from 1 to 6.
At configuration time (with SCT), the operator defines the list of blocking conditions activated
for each Circuit Breaker.
When the database is downloaded and switched, the load shedding automation takes into
account information described in the database (last setting sent by the SCADA is lost).
The use of blocking condition is also performed through the SCADA interface, whatever was
the status of the automation (On or Off). Three setpoints are defined on a per blocking
condition basis; each value combination gives the association between the CB and the
blocking condition (refer to the table of group definition).
The usage of blocking conditions is saved in non-volatile memory and restored after a
computer reboot. It is erased in case of database switch.
After assignment, the Blocking condition x status information for blocking condition(s) which
has(have) been modified is sent to the SCADA.
C264R/EN FT/C11 Functional Description
Page 40/46
MiCOM C264-R
Automation
The automation is activated only if it is On. The On / Off control (DPC) is performed through
the SCADA interface or the computer local HMI. The automation status is provided through a
DPS.
As soon as a fx< SPS is detected in a SET state, the CB belonging to the group x are
tripped, with the following constraints:
the order to trip the first CB will be sent in less than 100ms after the fx< detection
whatever was the number of CB in the group
if the group contains up to 20 CB, the order to trip the 20
th
CB will be sent in less than
500 ms after the fx< detection
if the group contains up to 40 CB, the order to trip the 20
th
CB will be sent in less than
500 ms after the fx< detection and the order to trip the last CB will be sent in less than
1 second after the fx< detection
a blocking condition on a CB prevents its trip
no other information than the blocking condition can prevent the CB trip (interlocking,
control uniqueness, bad CB state (already open, jammed, ), )
Note : time constraints are given from fx< transition detection to Digital
Output closure.
Any invalid state of the fx< SPS (Selfcheck faulty, toggling) will be not taken into account to
trig the automation.
In case of simultaneous fx< detection - i.e. multiple fx< detection with the same time tag -,
the groups will be activated in the order of trigger detection :
If the inter-group delay is null, the time constraints given above will be respected
for each group ;
If the inter-group delay is not null, all CB of one group will be tripped before
beginning to trip all CB of the following group.
In case of multiple fx< detection i.e. fx detection during activation of an other group - , the
groups will be activated in the order of trigger detection. So, all CB of the first group will be
tripped before beginning to trip all CB of the following group.
10.1.3 Outputs
LS On/Off Status (DPS type) : status of the Load Shedding automation
LS Group x status (SPS permanent type, 1x4) : set as soon as a group is activated
(i.e. the fx< input is set and automation status is On). Reset when the last CB control
has been performed, whatever was the control result
LS CB x rejected for blocking condition (SPS transient type, 1x40) : one information
on a per circuit breaker basis. Set during 100 ms if the control is refused due to a
blocking condition
LS CB x completed (SPS transient type, 1x40) : one information on a per circuit
breaker basis. Set during 100 ms if the control has been correctly performed (i.e.
breaker opened before the end of the control time-out.)
LS CB x failed (SPS transient type, 1x40) : one information on a per circuit breaker
basis. Set during 100 ms if the CB is not opened at the end of the control time-out
Listx Status (1x4) : status of the assignment of CB to a group, transmitted to the
SCADA through an analogue value (ASDU 09 or 10)
Blocking condition x Status (1x6) : list of CBs for which the blocking condition is set,
transmitted to the SCADA through an analogue value (ASDU 09 or 10)
CBx open control : control for CB trip
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 41/46
10.1.4 Hypothesis & Constraints
Only one frequency relay will provide frequency thresholds to the C264-R
Up to 40 Circuit Breakers can be managed by the Load Shedding automation
All DOU or CCU board used for CB controls must be in the same rack
All configurable information used for Load Shedding function are configured using the
SCT
There is no mean of visualisation/modification of settings from the computer local HMI
or from the CMT
Functioning in case of Main Rack redundancy
Load Shedding must works in case of Main Rack redundancy.
LS function can be set On or Off from the SCADA interface. The SCADA sends
this order to only one Main Rack. The order must be automatically transmitted to
other Main Racks.
All settings defined on a Main rack are also automatically transmitted to other
Main Racks.
[settings = Inter-group delay; List of Circuit Breaker attached to each group; List of
Circuit Breaker blocked by each blocking condition]
In case of a group activation (fx< goes in Set state), the LS automation is run in
parallel on all Main Racks.
Management of the LS On/Off state
The LS On/Off state is saved in non volatile memory. This information is erased
only when the computer boots with a DB without LS (so, this information is kept on
DB switch).
After a computer reboot, if a saved LS On/Off state is found the LS function is
set in this saved state, otherwise the LS is set in On state (default state).
Management of Settings
LS setting are saved in non volatile memory. These information are erased on DB
switch.
After a computer reboot, if saved LS settings are found these settings are used,
otherwise settings given by the DB are used.
C264R/EN FT/C11 Functional Description
Page 42/46
MiCOM C264-R
10.1.5 Configurable data
Attribute Default
Value
Range Provided
through
S9R file
Comments
Load Shedding Automation
Inter-group delay 100 milli-
second
from 0 to
9999ms
Yes with a 100 ms step
Circuit Breaker
Group assignment 0 [0..4] Yes 0 = no assignment to a group
Breaker number 0 [0..40] Yes 0 = not used in Load
Shedding automation
control time-out 600 ms [0..6000000] Yes Given by the feedback timeout
on the CB control.
Blocking condition n 1 No Yes / No Yes No = the blocking condition is
not used for the breaker
Blocking condition n 2 No Yes / No Yes
Blocking condition n 3 No Yes / No Yes
Blocking condition n 4 No Yes / No Yes
Blocking condition n 5 No Yes / No Yes
Blocking condition n 6 No Yes / No Yes
SPS / DPS datapoint
Blocking condition
number
0 [0..6] Yes 0 = the SPS / DPS is not used
as a blocking condition
Blocking state On On / Off Yes Indicates if the blocking
condition is active with the ON
or OFF state.
Furthermore, all datapoints described above are configured using the SCT and must be
provided by the S9R file.
10.2 Load Curtailment
GROUP 1 GROUP 2 GROUP 3 GROUP 4
List1
control
List3
control
List2
control
activation
List4
control
LC On/Off control
Blocking condition x
setting
CBx status
Database (.adb)
blocking condition
information
CBx control
time-out
C0294ENa
LC On/Off Status
LC Group x status
LC CB x rejected by
LC CB x completed
LC CB x failed
List x Status
Blocking condition
x status
CBx open control
blocking condition
LOAD CURTAILMENT
G1
activation
G2
activation
G3
activation
G4
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 43/46
10.2.1 Inputs
List1, List2, List3, List4 control : each list input is a set of two setpoints associated to
a group. These setpoints give the list of Circuit Breaker attached to a group. They can
be only received from the SCADA interface. ASDU 48 (setpoint normalised value) is
used for these setpoints.
Gx activation : SPC, for each group, which allows to activate the Load Curtailment
function for the Group x when a SET control is received (the RESET control has no
effect)
LC On/Off Control : control (DPC type) which allows to set On or Off the Load
Curtailment automation. This control can be received from the SCADA interface or
from the C264-R local HMI
Blocking condition x setting (1x6) : each blocking condition setting is a set of 2
setpoints. These setpoints gives the list of circuit breakers blocked by the condition x.
It can be only received from the SCADA interface. ASDU 48 (setpoint normalised
value) is used for these setpoints.
Blocking condition information : digital inputs which blocks the CB trip is set, according
to the CBx blocking condition setting. A maximum of 6 SPS / DPS can be defined as
blocking condition information
CBx status : status of each circuit breaker (Feedback of the CBx control)
CBx control time-out : one time-out per circuit breaker. For a circuit breaker, this time-
out defines the authorized delay between the CB control activation and the CB
position change. These time-out are defined in configuration thru SCT as the CB
controls Feedback time-out.
Database : C264-R database (.adb file), refer to 6.2.4
10.2.2 Algorithm
Group definition
At configuration time (with SCT), the operator defines the list of CB attached to each Load
Curtailment group. The minimum number of CB in a group is 0, the maximum number is 5.
No more than 20 CB can be defined for the whole automation. The 20 CB which can be used
in load curtailment function are tagged in configuration with a number from 1 to 20.
When the database is downloaded and switched, the load curtailment automation takes into
account information described in the database (last setting sent by the SCADA is lost). The
Listx status information is updated and sent to the SCADA.
The assignment of CB to the groups is performed on-line through the SCADA interface,
whatever was the status of the automation (On or Off). Two setpoints are defined per group,
each value combination gives the allocation of a CB to the group as defined in the table
below :
Breaker Number /
setpoint 1
/ 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Breaker Number /
setpoint 2
/ / / / / / / / / / / 20 19 18 17 16
Bit 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Value
16384 8192 4096 2048 1024 512 256 128 64 32 16 8 4 2 1
If a CB is already assigned to an other group, it is automatically re-assigned to the new
group (a CB can be affected to only one group). After assignment, the Listx status
information for group(s) which has(have) been modified is sent to the SCADA.
During CB assignment (from the reception of the Listx control up to the sending of the Listx
status), the load curtailment function cannot be started.
C264R/EN FT/C11 Functional Description
Page 44/46
MiCOM C264-R
The group definition is saved in non-volatile memory and restored after a computer reboot. It
is erased in case of database switch.
Locally to the computer, assignments of CB to a group can be performed only through a
database download.
Blocking conditions
Up to 6 SPS / DPS can be defined as blocking condition : they are numbered from 1 to 6.
At configuration time (with SCT), the operator defines the list of blocking conditions activated
for each Circuit Breaker.
When the database is downloaded and switched, the load shedding automation takes into
account information described in the database (last setting sent by the SCADA is lost).
The use of blocking condition is performed through the SCADA interface, whatever was the
status of the automation (On or Off). Two setpoints are defined on a per blocking condition
basis; each value combination gives the association between the CB and the blocking
condition (refer to the table of group definition).
The usage of blocking conditions is saved in non-volatile memory and restored after a
computer reboot. It is erased in case of database switch.
After assignment, the Blocking condition x status information for blocking condition(s) which
has(have) been modified is sent to the SCADA.
Automation
The automation is activated only if it is On. The On / Off control (DPC) is performed through
the SCADA interface or the computer local HMI. The automation status is provided through a
DPS.
When the SET control is received through the Gx Activation SPC (i.e. reception by the
computer of the order), all the CB belonging to the group x must be tripped in less than
300 ms.
Notes : - A blocking condition on a CB prevents its trip
- No other information than the blocking condition can prevent the CB
trip (interlocking, control uniqueness, bad CB state (already open,
jammed, ), .)
In case of multiple reception of Gx Activation controls, the groups will be activated in the
order of control reception. So the CB of one group will be tripped before beginning to trip the
CB of an other group. In this case, the time to trip the CB of the other(s) group(s) can be
more then 300ms.
10.2.3 Outputs
LC On/Off Status (DPS type) : status of the Load Curtailment automation
LC Group x status (SPS permanent type, 1x4) : set as soon as a group is activated
(i.e. one Gx Activation control received and automation status is On). Reset when the
last CB control has been performed, whatever was the control result
LC CB x rejected for blocking condition (SPS transient type, 1x20) : one information
on a per circuit breaker basis. Set during 100 ms if the control is refused due to a
blocking condition
LC CB x completed (SPS transient type, 1x20) : one information on a per circuit
breaker basis. Set during 100 ms if the control has been correctly performed (i.e.
breaker opened before the end of the control time-out.)
LC CB x failed (SPS transient type, 1x20) : one information on a per circuit breaker
basis. Set during 100 ms if the CB is not opened at the end of the control time-out
Listx Status (1x4) : status of the assignment of CB to a group, transmitted to the
SCADA through an analogue value (ASDU 09 or 10)
Functional Description C264R/EN FT/C11
MiCOM C264-R
Page 45/46
Blocking condition x Status (1x6) : list of CBs for which the blocking condition is set,
transmitted to the SCADA through an analogue value (ASDU 09 or 10)
CBx open control : control for CB trip
10.2.4 Hypothesis & Constraints
Up to 20 Circuit Breakers can be managed by the Load Curtailment automation
All DOU or CCU board used for CB controls must be in the same rack
All configurable information used for Load Curtailment function are configured using
the SCT
There is no mean of visualisation/modification of settings from the computer local HMI
or from the CMT
Functioning in case of Main Rack redundancy
identical to LS except for group activation : as the Gi activation is received from
SCADA interface, the LC automation is run only on the Main Rack which received this
activation.
Management of the LC On/Off state : identical to LS
Management of Settings : identical to LS
10.2.5 Configurable data
Attribute Default
Value
Range Provided
through
S9R file
Comments
Circuit Breaker
Group assignment 0 [0..4] Yes 0 = no assignment to a group
Breaker number 0 [0..20] Yes 0 = not used in Load
Curtailment automation
control time-out 600 ms [0..6000000] Yes Given by the feedback timeout
on the CB control.
Blocking condition n 1 No Yes / No Yes No = the blocking condition is
not used for the breaker
Blocking condition n 2 No Yes / No Yes
Blocking condition n 3 No Yes / No Yes
Blocking condition n 4 No Yes / No Yes
Blocking condition n 5 No Yes / No Yes
Blocking condition n 6 No Yes / No Yes
SPS / DPS datapoint
Blocking condition
number
0 [0..6] Yes 0 = the SPS / DPS is not used
as a blocking condition
Blocking state On On / Off Yes Indicates if the blocking
condition is active with the ON
or OFF state.
Furthermore, all datapoints described above are configured using the SCT and must be
provided by the S9R file.
C264R/EN FT/C11 Functional Description
Page 46/46
MiCOM C264-R
BLANK PAGE
Вам также может понравиться
- Enterprise Network Products Recommended Version List 2015Q4Документ36 страницEnterprise Network Products Recommended Version List 2015Q4Aghil Ghiasvand MkhОценок пока нет
- Alcatel-Lucent WCDMA UMTS BTS Description: Training ManualДокумент148 страницAlcatel-Lucent WCDMA UMTS BTS Description: Training ManualJuma BasilioОценок пока нет
- E Course List English 20150930Документ62 страницыE Course List English 20150930Aghil Ghiasvand MkhОценок пока нет
- 2015TrainingProposal forTransmissionNetworkProjectДокумент315 страниц2015TrainingProposal forTransmissionNetworkProjectDeriansyah Al Ghuraba100% (1)
- 2015CustomerTrainingCatalog CourseDescriptions (TransmissionNetwork)Документ317 страниц2015CustomerTrainingCatalog CourseDescriptions (TransmissionNetwork)Aghil Ghiasvand MkhОценок пока нет
- Customer Training Catalog Training Programs: Transmission Network Product Technology TrainingДокумент197 страницCustomer Training Catalog Training Programs: Transmission Network Product Technology TrainingAghil Ghiasvand MkhОценок пока нет
- 1 Training Programs List: IDC Solution Overview Training 2Документ100 страниц1 Training Programs List: IDC Solution Overview Training 2Aghil Ghiasvand MkhОценок пока нет
- 2 2211Документ2 страницы2 2211MONAОценок пока нет
- RF Drive Test From A To Z - ArabicДокумент65 страницRF Drive Test From A To Z - Arabiceng Mahmoud Abdel-Aziz100% (1)
- d-c264r Entd c12Документ22 страницыd-c264r Entd c12Aghil Ghiasvand MkhОценок пока нет
- PLC1790 B1&2 enДокумент48 страницPLC1790 B1&2 enAghil Ghiasvand MkhОценок пока нет
- S Wave AntennaДокумент102 страницыS Wave AntennaQuan LuongОценок пока нет
- Digital Output PhenamenonДокумент1 страницаDigital Output PhenamenonAghil Ghiasvand MkhОценок пока нет
- BSS Feature Configuration Guide (Based On MML) (V900R008C12 - 01)Документ438 страницBSS Feature Configuration Guide (Based On MML) (V900R008C12 - 01)Humberto Jose Arias BarrosОценок пока нет
- 2 2211Документ2 страницы2 2211MONAОценок пока нет
- Advanced RANOP Chapter 4 - Drop Call RatioДокумент12 страницAdvanced RANOP Chapter 4 - Drop Call RatioAghil Ghiasvand MkhОценок пока нет
- 1 45 Writing SampleДокумент2 страницы1 45 Writing SampleAghil Ghiasvand MkhОценок пока нет
- ABS14 Nail SPPLMNTДокумент12 страницABS14 Nail SPPLMNTAghil Ghiasvand MkhОценок пока нет
- 1 45 Writing SampleДокумент2 страницы1 45 Writing SampleAghil Ghiasvand MkhОценок пока нет
- Ericsson CommandsДокумент3 страницыEricsson CommandsAghil Ghiasvand MkhОценок пока нет
- 5 Communications Networks The Enablers of Utility Automation SuccessДокумент15 страниц5 Communications Networks The Enablers of Utility Automation SuccessAghil Ghiasvand MkhОценок пока нет
- Advanced RANOP Chapter 8 - Alarm Interpretation and Monitoring PFFДокумент20 страницAdvanced RANOP Chapter 8 - Alarm Interpretation and Monitoring PFFAghil Ghiasvand MkhОценок пока нет
- Drive Test 2G Vs 3GДокумент11 страницDrive Test 2G Vs 3GBayu100% (2)
- F3Документ7 страницF3Aghil Ghiasvand MkhОценок пока нет
- Huawei KLM Mapping ChartДокумент4 страницыHuawei KLM Mapping ChartAghil Ghiasvand Mkh100% (1)
- Chapter 1 of《GSM RNP&RNO》- GSM OverviewДокумент6 страницChapter 1 of《GSM RNP&RNO》- GSM OverviewKhaled ShetewyОценок пока нет
- Inacon LTE From A-ZДокумент367 страницInacon LTE From A-ZDenny WijayaОценок пока нет
- GSM Originating Call FlowДокумент4 страницыGSM Originating Call Flowkeerthana2385100% (7)
- Huawei KLM Mapping ChartДокумент4 страницыHuawei KLM Mapping ChartAghil Ghiasvand Mkh100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Letters of ComplaintДокумент3 страницыLetters of ComplaintMercedes Jimenez RomanОценок пока нет
- Instructional Supervisory Plan BITДокумент7 страницInstructional Supervisory Plan BITjeo nalugon100% (2)
- Conspicuous Consumption-A Literature ReviewДокумент15 страницConspicuous Consumption-A Literature Reviewlieu_hyacinthОценок пока нет
- Vice President Marketing Communications in Washington DC Resume Mary GotschallДокумент3 страницыVice President Marketing Communications in Washington DC Resume Mary GotschallMaryGotschallОценок пока нет
- Business Intelligence in RetailДокумент21 страницаBusiness Intelligence in RetailGaurav Kumar100% (1)
- Qsen CurriculumДокумент5 страницQsen Curriculumapi-280981631Оценок пока нет
- Review of Related LiteratureДокумент5 страницReview of Related LiteratureRJ PareniaОценок пока нет
- Ansys Flu - BatДокумент30 страницAnsys Flu - BatNikola BoskovicОценок пока нет
- PCA Power StatusДокумент10 страницPCA Power Statussanju_81Оценок пока нет
- Pro Angular JS (Apress)Документ1 страницаPro Angular JS (Apress)Dreamtech PressОценок пока нет
- WE) The Accentual Structure of English WordsДокумент8 страницWE) The Accentual Structure of English Wordszhannatagabergen2606Оценок пока нет
- Dances in LuzonДокумент13 страницDances in LuzonDenise Michelle AntivoОценок пока нет
- Comparative Analysis of Levis Wrangler & LeeДокумент10 страницComparative Analysis of Levis Wrangler & LeeNeelakshi srivastavaОценок пока нет
- Battle of The ChoirДокумент3 страницыBattle of The Choirkoizume_reiОценок пока нет
- Revision Notes On Section 1.6 - Belief, Uncertainty & UnbeliefДокумент5 страницRevision Notes On Section 1.6 - Belief, Uncertainty & Unbeliefnisalielisha rodrigoОценок пока нет
- 1820 Celestial EventДокумент8 страниц1820 Celestial EventDoor Of ElОценок пока нет
- Virulence: Factors in Escherichia Coli Urinary Tract InfectionДокумент49 страницVirulence: Factors in Escherichia Coli Urinary Tract Infectionfajar nugrahaОценок пока нет
- A Palace in TimeДокумент6 страницA Palace in TimeSonkheОценок пока нет
- Agreement - AFS - RERA Punjab 20190906pro - Forma - Agreement - of - Sale - To - Be - Signed - With - AllotteesДокумент35 страницAgreement - AFS - RERA Punjab 20190906pro - Forma - Agreement - of - Sale - To - Be - Signed - With - AllotteesPuran Singh LabanaОценок пока нет
- Inheritance : Trung Tâm Anh NG Nhung PH M 27N7A KĐT Trung Hòa Nhân Chính - 0946 530 486 - 0964 177 322Документ3 страницыInheritance : Trung Tâm Anh NG Nhung PH M 27N7A KĐT Trung Hòa Nhân Chính - 0946 530 486 - 0964 177 322Trung PhamОценок пока нет
- Lista Materijala WordДокумент8 страницLista Materijala WordAdis MacanovicОценок пока нет
- 145class 7 Integers CH 1Документ2 страницы145class 7 Integers CH 17A04Aditya MayankОценок пока нет
- Health Problem Family Nusing Problem Goals of Care Objectives of CareДокумент8 страницHealth Problem Family Nusing Problem Goals of Care Objectives of CareMyrshaida IbrahimОценок пока нет
- Robbins Ob14 PPT 11Документ27 страницRobbins Ob14 PPT 11daneshnedaieОценок пока нет
- Program PlanningДокумент24 страницыProgram Planningkylexian1Оценок пока нет
- Esok RPHДокумент1 страницаEsok RPHAzira RoshanОценок пока нет
- Coaching Skills For Optimal PerformanceДокумент58 страницCoaching Skills For Optimal PerformanceYodhia Antariksa100% (3)
- Phonetic Sounds (Vowel Sounds and Consonant Sounds)Документ48 страницPhonetic Sounds (Vowel Sounds and Consonant Sounds)Jayson Donor Zabala100% (1)
- The Court of Heaven 1Документ2 страницыThe Court of Heaven 1Rhoda Collins100% (7)
- t10 2010 Jun QДокумент10 страницt10 2010 Jun QAjay TakiarОценок пока нет