Академический Документы
Профессиональный Документы
Культура Документы
Untitled 1
Загружено:
Diego Duran ViguerasАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Untitled 1
Загружено:
Diego Duran ViguerasАвторское право:
Доступные форматы
FUNDAMENTOS
DE
,
ROBOTICA
Antonio Barrientos
Lus Felipe Pen
Carlos Balaguer
Rafael Aracil
Universidad Politcnica de Madrid
McGraw-ill
MADRID. BUENOSAIRES. CARACAS. GUATEMALA. LISBOA. MXICO. NUEVAYORK
PANAM. SANJUAN. SANTAFDEBOGOT. SANTIAGO. so PAULO
AUCKLAND. HAMBURGOLONDRES. MILN. MONTREAL. NUEVADELHIPARs
. SANFRANCISCO. SIDNEYSINGAPURSToLOUISTOKIO. TORONTO
FUNDAMENTOS DE ROBTICA
No est permitida la reproduccin total o parcial de este libro, ni su tratamiento
informtico, ni la transmisin de ninguna forma o por cualquier medio, ya sea
electrnico, mecnico, por fotocopia, por registro u otros mtodos, sin el permiso
previo y por escrito de los titulares del Copyright.
DEREC!" RE"ER#$D!" % &''(, respecto a la primera edicin en espa)ol, por
*c+R$,-.//l.N0ER$*ER.C$N$ DE E"1$2$, ". $.
Edificio #alrealty
3asauri, &(, &.4 planta
56758 $ravaca 9*adrid:
."3N; 6<-<6&-76&=-'
Depsito legal; *.5.65=-&>i>i(
Editora; Concepcin ?ernnde@ *adrid
Cubierta; Estudio ?. 1i)uela
?oto de cubierta; CortesAa de D."$*BC1*
Compuesto por los autores
.mpreso en; /avel, ". $.
.*1RE"! EN E"1$2$ - 1R.N0ED .N "1$.N
Antonio Barrientos Cruz es Ingeniero Industrial especialidad Automtica y Electrnica por la Escuela
Tcnica Superior de Ingenieros Industriales de Madrid (19!" y #octor Ingeniero Industrial por la
$ni%ersidad &olitcnica de Madrid (19'"( #esde 19 es pro)esor titular del #epartamento de
Automtica Ingenier*a Electrnica e In)ormtica Industrial de la $ni%ersidad &olitcnica de Madrid+
impartiendo entre otros cursos los correspondientes a regulacin automtica+ ro,tica+ computadores y
automatizacin de la produccin( #esde 19- .a impartido en m/ltiples ocasiones cursos de ro,tica+
tanto como parte de los estudios de Ingeniero Industrial como dentro de di)erentes programas para el
sector industrial(
0uis 1elipe &e2*n 3onru,ia es Ingeniero Industrial especialidad Automtica Electrnica por la
$ni%ersidad &olitcnica de Madrid( En la actualidad es in%estigador del grupo de ro,tica del #epar4
tamento de Automtica+ Ingenier*a Electrnica e In)ormtica Industrial (#ISAM" de la $ni%ersidad
&olitcnica de Madrid+ .a,iendo impartido di%ersos cursos de automatizacin y ro,tica tanto como
parte de los estudios de Ingeniero Industrial como en di)erentes programas para el sector industrial(
Carlos Balaguer Bemaldo de 5uirs o,tu%o el grado de Ingeniero Electromecnico por el Instituto
Energtico de Mosc/ (1966" e Ingeniero Industrial especialidad Automtica por la $ni%ersidad &oli4
tcnica de Madrid (191"( #octor Ingeniero por la $ni%ersidad &olitcnica de Madrid (197"+ .a sido
pro)esor titular del #epartamento de Automtica+ Ingenier*a Electrnica e In)ormtica Industrial im4
partiendo cursos de control de procesos y ro,tica( En la actualidad es Catedrtico del #epartamento
de Ingenier*a Elctrica en la $ni%ersidad Carlos III de Madrid(
8a)ael Aracil Santon9a es Ingeniero Industrial especialidad Elctrica y #octor Ingeniero Industrial
por la $ni%ersidad &olitcnica de Madrid( En 1967 se incorpor al #epartamento de Automtica+
Ingenier*a Electrnica e In)ormtica Industrial de la $ni%ersidad &olitcnica de Madrid donde+ desde
197+ es Catedrtico( En la actualidad coordina las reas de ro,tica y %isin arti)icial(
Acerca de los autores
%
Contenido
Prefacio xm
Captulo 1. INTRODUCCIN 1
1.1. Antecedentes histricos
1.2. Origen y desarrollo de la robtica
1.3. Definicin y clasificacin del robot
1.3.1. Definicin del robot industrial
1.3.2. Clasificacin del robot industrial
1.3.3. Robots de servicio y teleoperados
1.4. ibliograf!a
2
"
#
$
11
11
14
Captulo 2. MORFOLOGA DEL ROBOT 1"
2.1. %structura mec&nica de un robot
2.2. 'ransmisiones y reductores
2.2.1. 'ransmisiones
2.2.2. Reductores
2.2.3. Accionamiento directo
2.3. Actuadores
2.3.1. Actuadores neum&ticos
2.3.2. Actuadores hidr&ulicos
2.3.3. Actuadores el(ctricos
2.4. )ensores internos
2.4.1. )ensores de posicin
2.4.2. )ensores de velocidad
2.4.3. )ensores de presencia
2.". %lementos terminales
2.*. ibliograf!a
1*
1$
20
21
24
2"
2*
2#
29
3*
3+
42
43
44
4*
vii
viii Contenido
Captulo 3. HERRAMIENTAS MATEMTICAS PARA LA LOCALIZACIN ESPACIAL 49
3.1. Representacin de la posicin 50
3.1.1. Sistema cartesiano de referencia 50
3.1.2. Coordenadas cartesianas 51
3.1.3. Coordenadas polares y cilndricas 51
3.1.4. Coordenadas esfricas 52
3.2. Representacin de la orientacin 52
3.2.1. Matrices de rotacin 53
3.2.2. nulos de !uler 5"
3.2.3. #ar de rotacin $1
3.2.4. Cuaternios $1
3.3. Matrices de transformacin %omonea $2
3.3.1. Coordenadas & matrices %omoneas $2
3.3.2. 'plicacin de las matrices %omoneas $3
3.3.3. Sinificado eomtrico de las matrices %omoneas "4
3.304. Composicin de matrices %omoneas "$
3.3.5. (r)ficos de transformacin *0
3A. 'plicacin de los cuaternios *1
304.1. le+ra de cuaternios *1
304.2. ,tili-acin de los cuaternios *3
3.5. Relacin y comparacin entre los distintos mtodos de locali-acin espacial *4
3.5.1. Comparacin de mtodos de locali-acin espacial *5
3.5.2. Relacin entre los distintos mtodos de locali-acin espacial *$
3.$. .i+liorafa /2
Captulo 4. CINEMTICA DEL ROBOT 93
4.1. !l pro+lema cinem)tico directo /4
4.1.1. Resolucin del pro+lema cinem)tico directo mediante matrices de
transformacin %omonea /4
4.1.2. 'loritmo de 0enavit12arten+er para la o+tencin del modelo
cinem)tico directo /"
4.1.3. Resolucin del pro+lema cinem)tico directo mediante el uso de cuaternios 103
4.2. Cinem)tica inversa 10*
4.2.1. Resolucin del pro+lema cinem)tico inverso por mtodos eomtricos 110
4.2.2. Resolucin del pro+lema cinem)tico inverso a partir de la matri- de
transformacin %omonea 112
4.2.3. 0esacoplo cinem)tico 11*
4.3. Matri- 3aco+iana 122
4.3.1. Relaciones diferenciales 122
4.3.2. 3aco+iana inversa 124
4.3.3. Confiuraciones sinulares 12$
404. .i+liorafa 12/
Contenido ix
Captulo 5. DINMICA DEL ROBOT 131
5.1. Modelo dinmico de la estructura mecnica de un robot rgido 132
5.2. Obtencin del modelo dinmico de un robot mediante la formulacin
de Lagrange-uler 135
5.2.1. !lgoritmo computacional para el modelado dinmico por Lagrange-uler 13"
5.3. Obtencin del modelo dinmico de un robot mediante la formulacin
de #e$ton-uler 1%&
5.3.1. !lgoritmo computacional para el modelado dinmico por #e$ton-uler 1%&
5.%. Modelo dinmico en 'ariables de estado 155
5.5. Modelo dinmico en el espacio de la tarea 15(
5.". Modelo dinmico de los actuadores 1")
5.".1. Motor el*ctrico de corriente continua 1"1
5.".2. Motor +idrulico con ser'o'l'ula 1"%
5.,. -ibliografa 1",
Captulo ". CONTROL CINEMTICO 169
".1. .unciones del control cinemtico 1"(
".2. /ipos de tra0ectorias 1,2
".2.1. /ra0ectorias punto a punto 1,2
".2.2. /ra0ectorias coordinadas o isocronas 1,3
".2.3. /ra0ectorias continuas 1,3
".3. 1eneracin de tra0ectorias cartesianas 1,5
".3.1. 'olucin de la orientacin 1,5
".%. 2nterpolacin de tra0ectorias 1,,
".%.1. 2nterpoladores lineales 1,&
".%.2. 2nterpoladores c3bicos 1,&
".%.3. 2nterpoladores a tramos 1&1
".%.%. Otros interpoladores 1&%
".5. Muestreo de tra0ectorias cartesianas 1&%
".". -ibliografa 1&5
Captulo ,. CONTROL DINMICO 187
,.1. Control monoarticular 1&&
,.1.1. 2nfluencia del factor de reduccin 1&&
,.1.2. Control 425 1(3
,.1.3. Control 425 con prealimentacin 1(,
,.1.%. Control 45 con compensacin de gra'edad 1(&
,.2. Control multiarticular 2))
,.2.1. 5esacoplamiento por in'ersin del modelo 2))
,.2.2. Control 425 con prealimentacin 2)2
r
x Contenido
7.3. Control adaptativo
7.3.1. Control adaptativo por planificacin de ganancias (GS)
7.3.2. Control adaptativo con modelo de referencia (MRAC)
7.3.3. Control de par calclado adaptativo
7.!. Aspectos pr"cticos de la implantacin del reglador
7.!.1. A#ste de los par"metros del $%&. 'specificaciones de dise(o
7.!.2. Satracin de los amplificadores. 'fecto de la accin integral
7.!.3. )lexin y oscilaciones estrctrales
7.*. +i,liograf-a
2.!
2.*
2.7
2./
21.
21.
212
210
21/
Cap-tlo /. PROGRAMACIN DE ROBOTS 211
/.1. M2todos de programacin de ro,ots. Clasificacin
/.1.1. $rogramacin por giado
/.1.2. $rogramacin textal
/.2. Re3erimientos de n sistema de programacin de ro,ots
/.2.1. 'ntorno de programacin
/.2.2. Modelado del entorno
/.2.3. 4ipos de datos
/.2.!. Mane#o de entradas5salidas
/.2.*. Control del movimiento del ro,ot
/.2.0. Control del fl#o de e#eccin del programa
/.3. '#emplo de programacin de n ro,ot indstrial
/.!. Caracter-sticas ,"sicas de los lenga#es RA$%& y 67
/.!.1. 'l lenga#e de programacin RA$%&
/.!.2. 'l lenga#e de programacin 67
/.*. +i,liograf-a
22.
22.
223
22*
220
220
227
22/
221
23.
231
230
230
2!0
2*3
Cap-tlo 1. CRITERIOS DE IMPLANTACIN DE UNROBOT INDUSTRIAL 2**
1.1. &ise(o y control de na c2lla ro,oti8ada
1.1.1. &isposicin del ro,ot en la c2lla de tra,a#o
1.1.2. Caracter-sticas del sistema de control de la c2lla de tra,a#o
1.2. Caracter-sticas a considerar en la seleccin de n ro,ot
1.2.1. 9rea de tra,a#o
1.2.2. Grados de li,ertad
1.2.3. $recisin: repeti,ilidad y resolcin
1.2.!. 6elocidad
1.2.*. Capacidad de carga
1.2.0. Sistema de control
1.3. Segridad en instalaciones ro,oti8adas
1.3.1. Casas de accidentes
2*0
2*7
201
202
203
20*
200
207
20/
20/
271
271
Contenido xi
9.3.2. Medidas de seguridad
9.3.3. Normativa legal
904. Justificacin econmica
904.1. Factores econmicos y datos bsicos necesarios
904.2. El robot como elemento principal del anlisis econmico
904.3. Mtodos de anlisis econmico
9.. Mercado de robots
9.!. "ibliograf#a
272
2$!
2$$
2$%
2$9
2%&
2%
2%%
'ap#tulo (&. APLICACIONES DE LOS ROBOTS 29(
(&.(. 'lasificacin
(&.2. )plicaciones industriales de los robots
(&.2.(. *raba+os en fundicin
(&.2.2. ,oldadura
(&.2.3. )pliacin de materiales. -intura
10.204. )plicacin de ad.esivos y sellantes
(&.2.. )limentacin de m/uinas
(&.2.!. -rocesado
(&.2.$. 'orte
(&.2.%. Monta+e
(&.2.9. -aleti0acin
(&.2.(&. 'ontrol de calidad
(&.2.((. Manipulacin en salas blancas
(&.3. Nuevos sectores de aplicacin de los robots. 1obots de servicio
(&.3.(. 2ndustria nuclear
(&.3.2. Medicina
(&.3.3. 'onstruccin
lOA. "ibliograf#a
292
293
293
293
29$
299
299
3&(
3&2
3&3
3&
3&$
3&%
3((
3(2
3(3
3(3
3(!
Prefacio
En menos de 30 aos la robtica ha pasado de ser un mito, propio de la imaginacin de algunos autores
literarios, a una realidad imprescindible en el actual mercado productivo.Tras los primeros albores,
tmidos y de incierto futuro, la robtica experiment entre las dcadas de los setenta y ochenta un
notable auge, llegando en los noventa a lo ue por muchos ha sido considerado su mayora de edad,
caracteri!ada por una estabili!acin de la demanda y una aceptacin y reconocimiento pleno en la
industria.
"a formacin del profesional de la ingeniera, tanto en sus ramas de automati!acin, mec#nica o
incluso generalista, no ha podido de$ar de lado esta realidad y ha incluido desde finales de los ochenta
a la robtica como parte de sus ensean!as.
"a robtica posee un reconocido car#cter interdisciplinario, participando en ella diferentes disci%
plinas b#sicas y tecnologas tales como la teora de control, la mec#nica, la electrnica, el #lgebra y la
inform#tica, entre otras. &umerosas obras, la mayor parte en ingls, han surgido en el mercado biblio%
gr#fico desde '()0. En algunas de ellas se aprecia la tendencia de presentar la robtica como un sim%
ple repaso de tecnologas b#sicas *electrnica, inform#tica, mec#nica, etc.+. En otros, por el contrario,
se abusa de una excesiva especiali!acin, bien limitando el estudio de la robtica a un complicado
con$unto de problemas fsico matem#ticos, orientados a, conocer con detalle el funcionamiento del
sistema de controlo bien tratando la robtica -nicamente desde el punto de vista del usuario, sin dar
una adecuada informacin sobre las tecnologas ue la conforman.
&inguno de los planteamientos anteriores es a nuestro $uicio acertado. .na formacin en robtica
focali!ada exclusivamente en el control de robots no es la m#s -til para la mayora de los estudiantes,
ue de traba$ar con robots lo har#n como usuarios y no como fabricantes. /in embargo, no hay ue
perder de vista ue se est# formando a ingenieros, y ue hay ue proveerles de los medios adecuados
para abordar, de la manera m#s adecuada, los problemas ue puedan surgir en el desarrollo de su pro%
fesin.
0or estos motivos, en este texto se ha procurado llegar a un adecuado euilibrio entre los temas
relacionados con el conocimiento profundo del funcionamiento de un robot *en sus aspectos mec#ni%
co, inform#tico y de control+ y auellos en los ue se proporcionan los criterios para evaluar la conve%
niencia de utili!ar un robot y el modo m#s adecuado de hacerlo.
El libro est# fundamentalmente dirigido al estudiante de ingeniera en sus especialidades de 1uto%
mati!acin, Electrnica o similar. 2on su estudio el alumno aduirir# los conocimientos necesarios
para poder abordar adecuadamente el proyecto de una instalacin roboti!ada, $unto con una detallada
comprensin del funcionamiento del robot. 1simismo, su lectura es aconse$able para los estudiantes
de ingeniera tcnica o superior de cualuier otra especialidad.
xiii
xiv Prefacio
El enfoque eminentemente prctico y aplicado de buena parte del texto, lo hace tambin til para
todo aquel profesional que desee adquirir los conocimientos necesarios para entender y utilizar ade
cuadamente la robtica.
Su contenido es el de un primer curso de robtica, que se considera completo para todo aquel que
quiera iniciarse en la misma sin dear de lado sus mltiples vertientes. Es a su vez imprescindible para
aquellos que pretendan se!uir sus estudios de pos!rado dentro del rea de la robtica, en sus aspectos
ms compleos e innovadores.
"ara su correcta comprensin es preciso una formacin bsica en in!enier#a. Siendo en concreto
deseable tener una adecuada base en l!ebra matricial, electrnica, control e informtica
$pro!ramacin, arquitectura de computadores%. &o obstante, cualquier otro lector sin esta formacin
espec#fica, podr leer sin dificultad varios de los cap#tulos del libro, y captar, en los cap#tulos ms
compleos, cules son los obetivos sin tener que ahondar en los medios usados para lo!rarlos.
El libro se ha or!anizado de acuerdo a la experiencia docente de los autores, que suman ms de '(
a)os impartiendo cursos de robtica dentro del marco acadmico, as# como en cursos de especializa
cin para la industria. Se ha procurado el adecuado equilibrio entre los cap#tulos dedicados al control
de robot $*ap#tulos ',+,,,-,.% con los dedicados a su implantacin y uso $*ap#tulos /,0,1,2(%, inclu
yndose en todos un adecuado nmero de eemplos que faciliten el estudio y comprensin.
En el *ap#tulo 2 se presenta la robtica como tecnolo!#a interdisciplinar, definiendo al robot in
dustrial y comentando su desarrollo histrico y estado actual.
El *ap#tulo / est dedicado al estudio de los elementos que componen un robot3 estructura mec
nica, transmisiones y reductores, actuadores, elementos terminales y sensores. &o se pretende en el
mismo hacer un estudio exhaustivo de estos componentes, pues no es este obetivo propio de la rob
tica, sino destacar las caracter#sticas que los hacen adecuados para su empleo en los robots.
"ara que un robot pueda moverse y manipular obetos, es necesario una adecuada localizacin de
las confi!uraciones espaciales por las que se pretende que el robot pase. 4anto para el usuario del
robot como para su dise)ador es necesario manear adecuadamente una serie de herramientas mate
mticas que permitan situar en posicin y orientacin un obeto $en particular, el extremo del robot%
en el espacio tridimensional. El *ap#tulo ' reco!e de manera pormenorizada las diferentes alternativas
existentes para tal fin. Su adecuada asimilacin es imprescindible para abordar tanto los cap#tulos de
control como el de pro!ramacin.
El estudio de la cinemtica del robot permite relacionar la posicin de sus actuadores con la posi
cin y orientacin del extremo. Esta relacin no trivial, estudiada en el *ap#tulo +, es fundamental
para desarrollar el control del robot.
El *ap#tulo , aborda el modelado dinmico de un robot. *omo sistema dinmico, el robot es uno
de los sistemas ms fascinantes para el control, por incorporar muchas de aquellas dificultades que
clsicamente se obvian en el estudio del control de sistemas. "or este motivo, el *ap#tulo ,, unto con
el ., adems de su indudable inters para el estudio de la robtica, constituye un excelente colofn
para los estudios de control avanzado propios de un in!eniero de automatizacin.
4ras establecer los modelos cinemtico y dinmico de un robot en los *ap#tulos + y ,, respectiva
mente, se est en disposicin de abordar el control del mismo. En el *ap#tulo - se trata el control ci
nemtico, cuyo obetivo es definir con precisin las trayectorias temporales que debern desarrollar
cada uno de los actuadores del robot para conse!uir los obetivos de velocidad y precisin de la meor
manera posible. El resultado de esta definicin de trayectorias debe ser llevado a la prctica por el
control dinmico, obeto del *ap#tulo ., que trabaando con estrechas limitaciones de tiempo de cl5
Prefacio xv
culo sobre un sistema multivariable, fuertemente no lineal y de parmetros variables, debe conseguir
elevadas prestaciones.
Tras el paso por el modelado y control del robot, se abordan los aspectos ms prcticos de la rob
tica, comenzando en el Captulo 8 por la programacin. Esta es tratada en primer lugar desde un punto
de vista general, analizando las caractersticas de los diferentes procedimientos de programacin de
robots existentes. En segundo lugar se presentan dos de los lenguaes de programacin de robots ms
extendidos! el "# $%dept& y el ms reciente '%()* $%++&.
% la ,ora de llevar a la prctica la implantacin de un sistema robotizado, el ingeniero debe tener
criterio para seleccionar cul es el robot ms adecuado para su aplicacin, as como poder evaluar su
beneficio econmico. %dems, existen una serie de aspectos prcticos, como el dise-o de la c.lula o
la seguridad de la misma, sobre los /ue si bien es difcil establecer una metodologa, s es posible dar
unas premisas bsicas /ue sirvan de gua y orientacin a /uien se enfrenta por primera vez con este
tipo de problemas. En el Captulo 0 se tratan de cubrir estos aspectos prcticos, incorporando adems
un breve repaso al mercado actual de la robtica industrial.
El 1ltimo captulo est dedicado a la utilizacin del robot en diferentes tipos de aplicaciones, tanto
las ms ,abituales, como la soldadura de carroceras, como las ms novedosas en los sectores de la
construccin o ciruga. Es evidente /ue la robtica est siendo aplicada a un gran n1mero de sectores
dispares, siendo imposible pretender /ue el estudiante de la robtica conozca las caractersticas de los
mismos $lo mismo cabra decir para el estudiante de la automatizacin de procesos en general&. 2o
obstante, tras el estudio del Captulo 34 el alumno tendr una idea formada sobre dnde se estn apli
cando los robots, los motivos por los /ue su empleo es rentable y, lo /ue puede ser ms importante,
una adecuada capacidad para proyectar estas soluciones robotizadas estudiadas a cual/uier otra apli
cacin o sector.
El contenido total del libro puede, a uicio de los autores, constituir un curso bsico de robtica de
una duracin cuatrimestral, aproximadamente.
5os autores /uisi.ramos agradecer muy sinceramente, la ayuda y el apoyo recibido en todo mo
mento de los profesores, ingenieros e investigadores, /ue ,an formado parte de *)6%7 y en particu
lar de su grupo de robtica! 8rancisco 9os. 'odrguez, :ortensia %mars, 9os. 7anuel (astor, Ernesto
;ambao, Carlos 8rancisco 'odrguez, 'o/ue 6altar.n, %ndr.s ;arca, 7anuel 8erre, %ntonio ;im.
nez y 9es1s Carrera, a,ora profesores de otras <niversidades. Todos ellos ,an compartido con noso
tros las penas y alegras /ue conlleva la investigacin y la ense-anza de la robtica. En este libro ,ay,
sin duda alguna, muc,os =sacos de arena= aportados por ellos.
Todos los profesores y miembros de *)6%7 ,an contribuido, durante 3> largos a-os, a /ue exis
tan los medios necesarios para poder desarrollar las m1ltiples investigaciones y desarrollos /ue ,an
permitido a los autores ad/uirir los conocimientos /ue se reflean en esta obra. % todos ellos nuestro
. reconocimiento.
Tambi.n debemos agradecer el esfuerzo realizado en la revisin y correccin del texto por %ntonio
;im.nez, 7iguel :ernando y 9avier 8ernndez?(ello, as como a Eduardo %vanzini, autor de las re?
creaciones de robots del Captulo 3. .
*e manera muy especial agradecemos a 9es1s Carrera su participacin destacada en el desarrollo
de algunos de los captulos, y a nuestra editora, Conc,a 8ernndez, /ue nos ,a apoyado y ,a confiado
en nosotros.
r
xvi Prefacio
ycomo no, queremos recordar a nuestras familias y seres queridos, a quienes agradecemos su
comprensin por las horas robadas y dedicamos, con todo nuestro cario, el resultado de un largo
esfuerzo.
Por ltimo, este libro est escrito pensando en nuestros alumnos, pasados, presentes y futuros.
Confiamos en que les sea til y que aporte algo en su formacin. Con nuestro mayor respeto hacia
ellos...
Madrid, noviembre de !!"
#os autores
Captulo 1
INTRODUCCIN
Antes que acabes, no te alabes
Refranero popular
El ciudadanoindustrializadoque vive a caballo entre el sigloxx y el XXI se ha visto en la necesidad de
aprender, en escasos 25 aos, el significadode un buen nerode nuevos t!rinosarcados por su alto
contenido tecnol"gico# $e ellos sin duda el %s relevante haya sido el del ordenador &o coputador'#
(ste, est% introducidohoy en d)a en su versi"npersonal en ultitud de hogaresy el ciudadano edio va
conociendo en creciente proporci"n, ade%s de su existencia, su odo de uso y buena parte de sus
posibilidades#
*ero de+ando de lado esta verdadera revoluci"n social, existen otros conceptos procedentes del de,
sarrollo tecnol"gico que han superado las barreras ipuestas por las industrias y centros de investiga,
ci"n, incorpor%ndose en cierta edida al lengua+e coloquial# Es llaativo c"o entre !stas destaca el
concepto robot. Aun sin tener datos reales, no parece uy aventurado suponer que de preguntar al
ciudadano edio sobre qu! es un robot industrial, !ste deostrar)a tener, cuanto enos, una idea
aproxiada de su aspecto y utilidad#
Esta failiaridad con la que nuestra sociedad trata al robot es %s llaativa cuando se copara
con el aplio desconociiento que se puede tener de otras %quinas o aparatos, aun siendo de ayor
antig-edad o utilidad, coo por e+eplo ser)a el osciloscopio o los parientes cercanos de los robots.
las %quinas de control nu!rico#
*osibleente una de las causas principales que haya dado popularidad al robot sea su itificaci"n,
propiciada o aplificada por la literatura y el cine de ciencia ficci"n# /i bien, salvo escasas excepcio,
nes, los robots de novelas y pel)culas tienen un nulo parecido con el robot industrial, su frecuente
presencia en estos edios ha peritido que el t!rino nos sea failiar, originando que le abraos la
0
2 Fundamentos de robtica
puerta de nuestra cotidianeidad. Despus, ha sido suficiente con que en algunas ocasiones hayamos
visto un robot industrial real, por ejemplo en una noticia en televisin o prensa, para que hayamos
dejado de lado al robot mito y hayamos aceptado, como una mquina ms de nuestro entorno, a esa
especie de brazo mecnico animado que con rapidez y precisin suelda carroceras de vehculos o
inserta circuitos integrados en placas electrnicas.
El mito ha rodeado y rodea al robot, a pesar de las ms de !!.!!! unidades instaladas en el mun"
do a principios de #$$%. &us orgenes de ficcin, su controvertido impacto social, su aparente auto"
noma y notorio contenido tecnolgico origina que, a pesar de su popularidad, siga siendo admirado y
en ocasiones temido.
Este libro re'ne los conocimientos necesarios para conocer a fondo qu es, cmo funciona y para
qu sirve un robot. (o es en general un libro para el gran p'blico, pues en algunos captulos se pre"
sentan conocimientos avanzados en matemticas, electrnica, control, mecnica e informtica, pero
con las limitaciones impuestas en estos captulos, puede ser ledo y comprendido por cualquier perso"
na con alguna formacin tcnica.
)ras su lectura es de esperar la desmitificacin del robot, quedando a la altura de cualquier otra
mquina compleja, como otras muchas que nos rodean *automvil, televisin, etc.+.)ras su estudio, el
robot ser la sntesis de un importante bagaje de conocimientos cientifico,tcnicos, adecuadamente
conjuntados para dar como resultado un dispositivo destinado a mejorar la produccin y la calidad de
vida.
1.1. ANTECEDENTES HISTRICOS
- lo largo de toda la historia, el hombre se ha sentido fascinado por mquinas y dispositivos capaces de
imitar las funciones y los movimientos de los seres vivos. .os griegos tenan una palabra especfica para
denominar a estas mquinas/ automatos. De esta palabra deriva la actual autmata: mquina que imita
la figura y movimientosde un ser animado. .os mecanismos animados de 0ern de -lejandra *1% d.2.+
se movana travs de dispositivos hidrulicos, poleas y palancas y tenan fines eminentementel'dicos.
.a cultura rabe *siglos 3444 a xv) hered y difundi los conocimientos griegos, utilizndolos no
slo para realizar mecanismos destinados a la diversin, sino que les dio una aplicacin prctica, in"
troducindolos en la vida cotidiana de la realeza. Ejemplo de stos son diversos sistemas dispensado"
res automticos de agua para beber o lavarse. )ambin de ese perodo son otros automtas, de los que
hasta la actualidad no han llegado ms que referencias no suficientemente documentadas, como el
Hombre de hierro de -lberto 5agno *#6!7,.#616+ o la Cabeza parlante de 8oger 9acon *#6#7 ,
#6$7+. :tro ejemplo relevante de aquella poca fue el Gallo de Estrasburgo *#;%6+. <ste, que es el
autmata ms antiguo que se conserva en la actualidad, formaba parte del reloj de la torre de la cate"
dral de Estrasburgo y al dar las horas mova las alas y el pico.
Durante los siglos =3 y =34 alguno de los ms relevantes representantes del renacimiento se inte"
resan tambin por los ingenios descritos y desarrollados por los griegos. Es conocido el Len mecni
co construido por .eonardo Da 3inci *#7%6 ,#%#$+ para el rey .uis =44 de >rancia, que se abra el
pecho con su garra y mostraba el escudo de armas del rey. En Espa?a es conocido el Hombre de palo,
r
Introduccin 3
construido por Juanelo Turriano en siglo XVI para el emperador Carlos V. Este autmata con forma de
monje, andaba y mova la cabe!a, ojos, boca y bra!os.
"urante los siglos XVII y XVIII se crearon ingenios mec#nicos $ue tenan alguna de las caractersti%
cas de los robots actuales. Estos dispositivos fueron creados en su mayora por artesanos del gremio
de la relojera. &u misin principal era la de entretener a las gentes de la corte y servir de atraccin en
las ferias. Estos autmatas representaban figuras 'umanas, animales o pueblos enteros. &on destaca%
bles entre otros el pato de Vaucanson y los mu(ecos de la familia "ro! y de )ailladert.
Jac$ues Vaucanson *+,-./+,012, autor del primer telar mec#nico, construy varios mu(ecos ani%
mados, entre los $ue destaca un flautista capa! de tocar varias melodas y un pato *+,302 capa! de
gra!nar, beber, comer, digerir y evacuar la comida. El relojero sui!o 3ierre Ja$uet "ro! *+,1+/+,.-2 y
sus 'ijos 4enri/5ouis y Ja$uet construyeron diversos mu(ecos capaces de escribir *+,,-2, dibujar
*+,,12 y tocar diversas melodas en un rgano *+,,32. Estos a6n se conservan en el museo de 7rte e
4istoria de 8euc'#stel, &ui!a. Contempor#neo de los relojeros franceses y sui!os fue 4enry )aillar%
det, $uien construy, entre otros, una mu(eca capa! de dibujar y $ue a6n se conserva en 9iladelfia.
7 finales del siglo XVIII y principios del XIX se desarrollaron algunas ingeniosas invenciones me%
c#nicas, utili!adas fundamentalmente en la industria te:til, entre las $ue destacan la 'iladora giratoria
de 4argreaves *+,,-2, la 'iladora mec#nica de Crompton *+,,.2, el telar mec#nico de Cart;rig't
*+,0<2 y el telar de Jac$uard *+0-+2. Este 6ltimo utili!aba una cinta de papel perforada como un pro%
grama para las acciones de la m#$uina. Es a partir de este momento cuando se empie!an a utili!ar
dispositivos autom#ticos en la produccin, dando paso a la automati!acin industrial.
Tabla 1.1. Autmatas famosos
7(o 7utor 7utmata
+3<1 "esconocido =allo de la catedral de Estrasburgo
+>.. L."a Vinci 5en mec#nico
+<1< J. Turriano 4ombre de palo
+,30 J de Vaucanson 9lautista, tamborilero, pato, mu(ecas
mec#ni/
cas de tama(o 'umano
+,?. @. Von Aempelen Jugador de ajedre!
+,,- 9amilia "ro! Escriba, organista, dibujante
+0-< 4. )aillardet )u(eca mec#nica capa! de dibujar
5a palabra robot fue usada por primera ve! en el a(o +.1+, cuando el escritor c'eco Aarel CapeB
*+0.-/+.302 estrena en el teatro nacional de 3raga su obra Rossum's Universal Robot (R.U.R.).
[CAPEK-35][CAPEK-66]. &u origen es la palabra eslava robota, $ue se refiere al trabajo reali!ado de
manera for!ada. 5os robots de C.D.C. eran m#$uinas androides fabricadas a partir de la EformulaE
obtenida por un brillante cientfico llamado Cossum. Estos robots servan a sus jefes 'umanos desa%
rrollando todos los trabajos fsicos, 'asta $ue finalmente se rebelan contra sus due(os, destruyendo
toda la vida 'umana, a e:cepcin de uno de sus creadores, con la frustrada esperan!a de $ue les ense%
(e a reproducirse.
r
,
4 Fundamentos de robtica
El tr mino posiblemente hubier a cado en desuso si no hubiese sido por los escr itor es del gner o
liter ar io de la ciencia ficcin, algunos de los cuales r etomar on la palabr a, e incluso el mensaje de la
obr a de Capek: la dominacin de la especie humana por ser es hechos a su pr opia imagen. As, en
19!, "hea #an $ar bou escr ibe Metrpolis, no#ela poster ior mente lle#ada al cine por su mar ido %r it&
'ang, en donde la masa obr er a de una sociedad super industr iali&ada es manipulada por un lider an(
dr oide llamado )ar a.
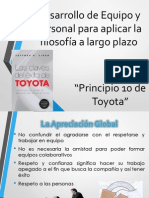
Figura 1.1. Sistema de telemanipulacin bilateral.
*er o sin duda alguna, fue el escr itor amer icano de or igen r uso +saac Asimo# ,19-.199/ el m01i(
mo impulsor de la palabr a r obot. En octubr e de 1923 public en la r e#ista Galaxy Science Fiction una
histor ia en la 4ue por pr imer a #e& enunci sus tres leyes de la robtica}.
1. 5n r obot no puede per judicar a un ser humano, ni con su inaccin per mitir 4ue un ser humano
sufr a da6o.
. 5n r obot ha de obedecer las r denes r ecibidas de un ser humano, e1cepto si tales r denes en(
tr an en conflicto con la pr imer a le7.
8. 5n r obot debe pr oteger su pr opia e1istencia mientr as tal pr oteccin no entr e en conflicto con la
pr imer a o segunda le7.
1 En la no#ela Robots e Imperio, publicada en 1993, Asimo# incor por una cuar ta le7, conocida como le7 ce(
r o: un r obot no puede lastimar a la humanidad o, por falta de accin, per mitir 4ue la humanidad sufr a da6o. Esta
le7, de ma7or pr ior idad 4ue la pr imer a ,4ue debe ser modificada en tal sentido/, antepone el bien comunitar io al
indi#idual.
Introduccin 5
Se le atribuye a Asimov la creacin del trmino robotics (robtica) y sin lugar a duda, desde su
obra literaria, ha contribuido decisivamente a la divulgacin y difusin de la robtica.
1.2. ORIGEN yDESARROLLO DE LA ROBTICA
El robot como mquina lleva un desarrollo independiente del trmino robot. ras los primeros
autmatas descritos en el apartado anterior, casi todos de aspecto humano, los progenitores ms directos
de los robots fueron los telemanipuladores (!igura "."). En "#$% &.'. (oert) del Argonne *ational
+aboratory desarroll, con el ob,etivo de manipular elementos radioactivos sin riesgo para el operador,
el primer telemanipulador. -ste consist.a en un dispositivo mecnico maestro/esclavo. El manipulador
maestro, situado en la )ona segura, era movido directamente por el operador, mientras que el esclavo,
situado en contacto con los elementos radioactivos y unido mecnicamente al maestro, reproduc.a
fielmente los movimientos de ste. El operador adems de poder observar a travs de un grueso cristal el
resultado de sus acciones, sent.a a travs del dispositivo maestro, las fuer)as que el esclavo e,erc.a sobre
el entorno.
A0os ms tarde, en "#1$, (oert) hi)o uso de la tecnolog.a electrnica y del servocontrol sustitu2
yendo la transmisin mecnica por otra elctrica y desarrollando as. el primer telemanipulador con
servocontrol bilateral. 3tro de los pioneros de la telemanipulacin fue &alph 4osher, ingeniero de la
(eneral Electric que en "#1% desarroll un dispositivo denominado 5andy/4an, consistente en 6
bra)os mecnicos teleoperados mediante un maestro del tipo denominado e7oesqueleto. 8unto a la
industria nuclear, a lo largo de los a0os sesenta la industria submarina comen) a interesarse por el
uso de los telemanipuladores. A este inters se sum la industria espacial en los a0os setenta.
+a evolucin de los telemanipuladores a lo largo de los 9ltimos a0os no ha sido tan espectacular
como la de los robots. &ecluidos en un mercado selecto y limitado (industria nuclear, militar, espacial,
etc.) son en general desconocidos y comparativamente poco atendidos por los investigadores y usua2
rios de robots. :or su propia concepcin, un telemanipulador precisa del mando continuo de un ope2
rador, y salvo por las aportaciones incorporadas con el concepto del control supervisado y la me,ora
de la telepresencia promovida hoy en d.a por la realidad virtual, sus capacidades no han variado mu2
cho respecto a las de sus origenes.
+a sustitucin del operador por un programa de ordenador que controlase los movimientos del ma2
nipulador dio paso al concepto de robot.
+a primera patente de un dispositivo robtica fue solicitada en mar)o de "#1$ por el inventor bri2
tnico '.;. <en=ard. >icha patente fue emitida en el &eino ?nido en "#1@ con el n9mero @%"$A1.
Sin embargo, fue (eorge '. >evol, ingeniero norteamericano, inventor y autor de varias patentes, el
que estableci las bases del robot industrial moderno. En "#1$ >evol concibi la idea de un dispositi2
vo de transferencia de artculos programada que se patent en Estados ?nidos en "#A" con el n9me2
ro 6#%%6B@. En "#1A pone esta idea en conocimiento de 8oseph !. Engelberger ("#61/ ), vido lector
de Asimov y director de ingenier.a de la divisin aeroespacial de la empresa 4anning 4a7=ell y
4oore en Stanford, 'onneticut. 8untos, >evol y Engelberger comien)an a traba,ar en la utili)acin
industrial de sus mquinas, fundando la 'onsolidated 'ontrols 'orporation, que ms tarde se con/
r
,
6 Fundamentos de robtica
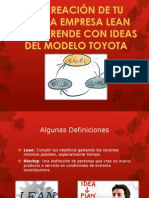
Figura 1.2. Robot Unimate 2000. Uno de los pr imer os modelos comer ciales de Unimation.
(Cor tesa de Stabli.)
vierte en Unimation (Universal Automation), e instalando su primera mquina Unimate (1960) similar
a la de la Figura 1.2 en la fbria de !eneral "otors de #renton, $ueva %erse&, en una apliai'n de
fundii'n por in&ei'n. (tras grandes empresas, omo la A"F, emprendieron la onstrui'n de
mquinas similares ()ersatran, 196*), que ms tarde por motivos omeriales se denominaron on el
t+rmino robot proedente de la ienia fii'n & a pesar de no ontar on la aparienia ,umana de
aquellos.
-n 196. %.F. -ngelberger visit' %ap'n & poo ms tarde se firmaron auerdos on /a0asa1i para
la onstrui'n de robots tipo Unimate. -l reimiento de la rob'tia en %ap'n aventa2' en breve a los
-stados Unidos graias a $issan, que form' la primera asoiai'n rob'tia del mundo, la Asociacin
de Robtica Industrial de Japn (%34A) en 1952. 6os a7os ms tarde se form' el Instituto de Robti
ca de Amrica (43A), que en 19.8 ambi' su nombre por el de Asociacin de Industrias Robticas,
manteniendo las mismas siglas (43A).
9or su parte -uropa tuvo un despertar ms tard:o. -n 195* la firma suea A;-A onstru&' el pri<
mer robot on aionamiento totalmente el+trio, el robot 34b6 (Figura 1.*), seguido un a7o ms
tarde del 34b60. -n 19.0 se fund' la Federacin Internacional de Robtica on sede en -stoolmo,
;ueia.
Introduccin 7
Figura 1.3. Robot IRb6 de la firma sueca ASEA. (Cortesa de ABB Robtica.)
La configuracin de los primeros robots responda a las denominadas configuraciones esfrica y
antropomrfica, de uso especialmente vlido para la manipulacin. En 19!, el profesor "a#ino de la
$niversidad %amanas&i de 'apn, desarrolla en concepto de robot ()*+* (Selective Compliance
Assembly Robot Ann) ,ue busca un robot con un n-mero reducido de grados de libertad ./ o 01, un
coste limitado y una configuracin orientada al ensamblado de pie2as.
La evolucin de los robots industriales desde sus primeros balbuceos &a sido vertiginosa. En poco
ms de /3 a4os las investigaciones y desarrollos sobre robtica industrial &an permitido ,ue los robots
tomen posiciones en casi todas las reas productivas y tipos de industria. En pe,ue4as o grandes f5
bricas, los robots pueden sustituir al &ombre en a,uellas tareas repetitivas y &ostiles, adaptndose
inmediatamente a los cambios de produccin solicitados por la demanda variable. En la 6igura 1.0 se
muestra uno de los -ltimos modelos comerciales de robot industrial.
Los futuros desarrollos de la robtica apuntan a aumentar su movilidad, destre2a y autonoma de
sus acciones. La mayor parte de los robots actuales son con base esttica, y se utili2an en aplicaciones
industriales tales como ensamblado, soldadura, alimentacin de m,uinas &erramientas, etc. (in em5
bargo, e7isten otro tipo de aplicaciones ,ue &an &ec&o evolucionar en gran medida tanto la concep5
cin de los robots como su propia morfologa. Entre estos robots dedicados a aplicaciones no indus5
triales destacan los robots espaciales .bra2os para lan2amiento y recuperacin de satlites, ve&culos
de e7ploracin lunar, robots para construccin y mantenimiento de &ard8are en el espacio19 robots
para aplicaciones submarinas y subterrneas .e7ploracin submarina, instalacin y mantenimiento de
r
8 Fundamentos de robtica
cables telefnicos submar inos, limpieza e inspeccin de tuber as y dr enajes subter r neos, inspeccin
de sistemas de r efr iger acin de centr ales nuclear es); r obots militar es (desactivacin de bombas, r obots
centinelas exper imentales dedicados a patr ullar r eas cr ticas) ; r obots mviles industr iales (r obots
bomber os par a patr ullar fbr icas, r obots bibliotecar ios, r obots andantes con pier nas); aplicaciones
mdicas (pr tesis r obotizadas, sistemas de ayuda a discapacitados); aplicaciones agr colas (sembr ado
y r ecogida de cosechas, r obot par a esuilar ovejas); y un lar go etcter a! "ar ece como si la r obtica y
los telemanipulador es, volviendo los ojos hacia sus or genes y con la exper iencia acumulada tr as #$
a%os, r eempr endiesen, esta vez juntos, el camino ue un da tomar on de maner a diver gente!
"uede ue en un futur o los r obots industr iales se par ezcan a auellos r obots de las novelas de &si'
mov, (ape) o *ar bou, ue dier on nombr e a los actuales her eder os del +nimate!
1.3. DEFINICIN Y CLASIFICACIN DEL ROBOT
,a r obtica est exper imentando en la actualidad una notor ia ampliacin de sus campos de actuacin!
-atur adas en cier ta medida las aplicaciones del r obot en taller es y lneas de fabr icacin, los r obots estn
tomando posiciones en aplicaciones fuer a del taller , car acter izadas fundamentalmente por la falta de
Figura 1.4. Robots Stabli tipo RX pertenecientes a la ltima generacin.
(Cortesa de StablL)
Introduccin 9
estandarizacindel producto y del proceso y la no estructuracin del entorno.
Buena parte de las definiciones y clasificaciones de robots existentes responde al robot amplia
mente utilizado hasta la fecha, destinado a la fabricacin flexible de series medias y que se conoce
como robot industrial o robot de produccin. Frente a stos, los robots especiales, tambin denomi
nados robots de servicio, estn an en un estado de desarrollo incipiente, aunque es previsible un con
siderable desarrollo de los mismos. as definiciones y !eneraciones aqu" presentadas responden fun
damentalmente al robot industrial.
1.3.1. Definicin de robot industrial
#xisten ciertas dificultades a la hora de establecer una definicin formal de lo que es un robot industrial.
a primera de ellas sur!e de la diferencia conceptual entre el mercado$apons y el euro%americano de lo
que es un robot y lo que es un manipulador. &s", mientras que para los $aponeses un robot industrial es
cualquier dispositivo mecnico dotado de articulaciones mviles destinado a la manipulacin 'ver la
Fi!ura (.)*, el mercado occidental es ms restrictivo, exi!iendo una mayor comple$idad, sobre todo en lo
relativo al control.
#n se!undo lu!ar, y centrndose ya en el concepto occidental, aunque existe una idea comn acer
ca de lo que es un robot industrial, no es fcil ponerse de acuerdo a la hora de establecer una defini
cin formal. &dems, la evolucin de la robtica ha ido obli!ando a diferentes actualizaciones de su
definicin.
a definicin ms comnmente aceptada posiblemente sea la de la Asociacin de Industrias Ro
bticas '+,&*, se!n la cual-
Figura 1.5. Manipuladores de accionamiento neumtico. (Cortesa de Bosch.)
r
10 Fundamentos de robtica
Un r obot industr ial es un manipulador multifuncional r epr ogr amable, capaz de mover mater ias,
piezas, her r amientas o dispositivos especiales, segn tr ayector ias var iables, pr ogr amadas par a
r ealizar tar eas diver sas.
Esta definicin, liger amente modificada, ha sido adoptada por la Organizacin Internacional de
Estndares (IS! "ue define al r obot industr ial como#
$anipulador multifuncional r epr ogr amable con var ios gr ados de liber tad, capaz de manipular
mater ias, piezas, her r amientas o dispositivos especiales segn tr ayector ias var iables pr ogr ama%
das par a r ealizar tar eas diver sas.
&obot# manipulador autom'tico ser vocontr olado, r epr ogr amable, polivalente, capaz de posicio%
nar y or ientar piezas, tiles o dispositivos especiales, siguiendo tr ayector ias var iables r epr o%
gr amables, par a la e(ecucin de tar eas var iadas. )or malmente tiene la for ma de uno o var ios
br azos ter minados en una mu*eca. Su unidad de contr ol incluye un dispositivo de memor ia y
ocasionalmente de per cepcin del entor no. )or malmente su uso es el de r ealizar una tar ea de
maner a c+clica, pudi,ndose adaptar a otr a sin cambios per manentes en su mater ial.
Se incluye en esta definicin la necesidad de "ue el r obot tenga var ios gr ados de liber tad. Una de%
finicin m's completa es la establecida por la Asociacin Francesa de Normalizacin (-.)&! "ue
define pr imer o el manipulador y, bas'ndose en dicha definicin, el r obot#
$anipulador # mecanismo for mado gener almente por elementos en ser ie, ar ticulados entr e s+,
destinado al agar r e y desplazamiento de ob(etos. Es multifuncional y puede ser gober nado di%
r ectamente por un oper ador humano o mediante dispositivo lgico.
/or ltimo, la Federacin Internacional de Robtica (I.&! en su infor me t,cnico IS01& 23434
(septiembr e 5622! distingue entr e r obot industr ial de manipulacin y otr os r obots#
/or r obot industr ial de manipulacin se entiende a una m'"uina de manipulacin autom'tica,
r epr ogr amable y multifuncional con tr es o m's e(es "ue pueden posicionar y or ientar mater ias,
piezas, her r amientas o dispositivos especiales par a la e(ecucin de tr aba(os diver sos en las dife%
r entes etapas de la pr oduccin industr ial, ya sea en una posicin fi(a o en movimiento.
1ipo -
1ipo 7
$anipulador con contr ol manual o telemando.
$anipulador autom'tico con ciclos pr ea(ustados8 r egulacin mediante fines de car r er a o
topes8 contr ol por /9:8 accionamiento neum'tico, el,ctr ico o hidr 'ulico.
&obot pr ogr amable con tr ayector ia continua o punto a punto. :ar ece de conocimientos
sobr e su entor no.
&obot capaz de ad"uir ir datos de su entor no, r eadaptando su tar ea en funcin de ,stos.
Tabla 1.2. Clasificacin de los robots segn la AFRI
1ipo;
1ipo :
Introduccin 11
Tabla 1.3. Clasificacin de los robots industriales en generaciones
1a Generacin Repite la tarea programada secuencialmente.
No toma en cuenta las posibles alteraciones de su entorno.
Adquiere informacin limitada de su entorno y acta en consecuencia.
Puede localizar, clasificar (isin! y detectar esfuerzos y adaptar sus moimien"
tos en consecuencia.
#u programacin se realiza mediante el empleo de un lengua$e natural.
Posee capacidad para la planificacin autom%tica de tareas.
&a Generacin
'a Generacin
(n esta definicin se debe entender que la reprogramabilidad y multifuncin se consigue sin modi"
ficaciones f)sicas del robot.
*omn a todas las definiciones anteriores es la aceptacin del robot industrial como un brazo me"
c%nico con capacidad de manipulacin y que incorpora un control m%s o menos comple$o. +n sistema
robotizado, en cambio, es un concepto m%s amplio. (ngloba todos aquellos dispositios que realizan
tareas de forma autom%tica en sustitucin de un ser ,umano y que pueden incorporar o no a uno a"
rios robots, siendo esto ltimo lo m%s frecuente.
1.3.2. Clasificacin del robot industrial
-a ./Rdistingue entre cuatro tipos de robots0
1 Robot secuencial.
1 Robot de trayectoria controlable.
1 Robot adaptatio.
1 Robot telemanipulado.
(sta clasificacin coincide en gran medida con la establecida por la Asociacin Francesa de Ro
btica Industrial (A/R.!(2abla 1.&!. (3%s simple y espec)fica es la clasificacin de los robots segn
generaciones recogida en la 2abla 1.'.!
1.3.3. Robots de servicio y teleoperados
(n cuanto a los robots de servicio, se pueden definir como0
1 4ispositios electromec%nicos miles o estacionarios, dotados normalmente de uno o arios
brazos mec%nicos independientes, controlados por un programa de ordenador y que realizan ta"
reas no industriales de sericio 5N6#2RAN6789:.
12 Fundamentos de robtica
En esta definicin entraran entre otros los robots dedicados a cuidados mdicos, educacin, do
msticos, uso en oficinas, intervencin en ambientes peligrosos, aplicaciones espaciales, aplicaciones
submarinas y agricultura. Sin embargo, esta definicin de robots de servicio excluye los telemanipu
ladores, pues stos no se mueven mediante el control de un programa de ordenador, sino que estn
controlados directamente por el operador humano.
elemanipulador !anipulador secuencial
"obot servocontrolado estacionario "obot sensori#ado estacionario
"obot de actuacin en exteriores
Figura 1.6. Algunos tipos de robots actualmente existentes (1).
Introduccin 13
Los robots teleoperados son definidos por la NASA (1978) como:
Dispositivos robticos con brazos manipuladores sensores cierto !rado de movilidad" controla#
dos remotamente por un operador $umano de manera directa o a trav%s de un ordenador&
'uncionoides (umanoides
): *&1
(J . J
-_-/
+nsectoides ,obots dom%sticos
":-"
,obots submarinos
Figura 1.7. Algunos tipos de robos actualmente existentes (11).
14 Fundamentos de robtica
Tabla 1.4. Clasificacin de los robots se~n T.M. Knasel
Generacin Nombre Tipo de control Grado de movilidad Usos ms frecuentes
1"(19!" #ic$ % place &ines de carrera' Ni(uno )anipulacin'
aprendi*a+e servicio de m,uinas
!" (19-" .ervo .ervocontrol' /espla*amiento por v0a .oldadura'
tra1ectoria continua' pintura
pro(r2 codicional
3" (199" 4nsamblado .ervos de precisin' 5G6 4nsamblado
visin' tacto' Guiado por v0a /esbarbado
pro(2 off7line
-" (!888" )vil .ensores inteli(entes #atas Construccin
9uedas )antenimiento
S" (2010) 4speciales Controlados con t:cnicas 5ndante Uso militar
de;5 .altar0n Uso espacial
#or ltimo 1 con el fin de dar una visin del posible futuro' se inclu1e en la Tabla 12- la clasifica<
cin propuesta por T2)2 Knasel =KN5.4>7?@2 >a &i(ura 12? 1 la &i(ura 12A recrean buena parte de los
diversos tipos de robots ,ue se pueden encontrar Bo1 en d0a2 Todos los robots representados eCisten
en la actualidad' aun,ue los casos ms futuristas estn en estado de desarrollo en los centros de inves<
ti(acin de robtica2
1.4. BIBLIOGRAFA
=5.;)D67E@ 12 5simov' K252 &ren$el' Robots. Mquinas a imagen y semejanza del hombre, #la*a 1
Fan:s' 19E2
=GH9DN79-@ G1ron #ress )ultimedia' Isaac Asimov's he !ltimate Robot, C/79D) media' )icro<
soft Corp2' 199-2
=C5#4K73E@ K2 Cape$' R.!.R Rossum's !niversal Robots, &292 Gorov1' #ra(a' 193E (4dicin en CBe<
co"2
=C5#4K7??@ K2 Cape$' R. !.R. Robots !niversales Rossum, 5lian*a 4ditorial' >ibro de bolsillo' )a<
drid'19??2
=KN5.4>7?@ T2)2 Kansel' ")obile 9obotics2 .tate of tBe art revieI"' enJ Robotics !' NortB7Kolland'
19?2
=ND.T95N/798@F2L2 Nostrand 1 42>2 .ampson' "9obots in .ervice ;ndustr1"' enJ "oncise Interna#
tional $ncyclo%ledia o& Robotics, 4ditor 92C2 /orf' FoBn Lile1 % .ons' 19982
=9D.K4;)79-@ )242 9osBeim' Robot $volution. he 'evelo%ment o& Anthrobotics, FoBn Lile1 %
.ons' 199-2
r
I
r
r
caPtu(02
MORFOLOGA DEL ROBOT
Cada uno cuenta de la feria como le va en ella.
Refranero popular
Un robot est formado por los siguientes elementos: estructura mecnica, transmisiones, sistema de
accionamiento, sistema sensorial, sistema de control y elementos terminales.
En este captulo se examinan estos elementos constitutivos de un robot. Se estudia primero la es
tructura mecnica, haciendo referencia a los distintos tipos de articulaciones posibles entre dos esla
bones consecutivos y a las configuraciones existentes. Seguidamente se analizan los sistemas de
transmisin y reduccin necesarios para transmitir a cada una de las articulaciones el movimiento
generado por los actuadores, !ue como elementos con capacidad para desplazar la estructura mecni
ca, son examinados en el siguiente apartado.
Se repasan despu"s los denominados sensores internos, necesarios para el control de los movi
mientos del robot. #inalmente, el $ltimo apartado se ocupa de los elementos terminales %pinzas, he
rramientas, dispositivos de su&ecin, etc.', !ue situados generalmente en el extremo del robot, sirven
para !ue "ste pueda interaccionar con el mundo exterior realizando las operaciones !ue le han sido
asignadas.
(un!ue los elementos empleados en los robots no son exclusivos de "stos %m!uinas herramientas
y otras muchas m!uinas emplean tecnologas seme&antes', las altas prestaciones !ue se exigen a los
robots han motivado !ue en ellos se empleen elementos con caractersticas especficas.
)a #igura *.+ muestra la estructura mecnica de unrobot, sobre la !ue se ha indicado alguno de los
elementos !ue se van a estudiar en este captulo, examinando las necesidades particulares de cada uno
y comparando las diversas alternativas existentes. Se se,alarn adems cules son las tendencias ac
tuales y los desarrollos !ue se prev"n para el futuro.
15
DE ENGRANAJES
16 Fundamentos de robtica
MOTOR A
REDUCTOR COMPACTO
EJES DE TRANSr,lISION
RREA
ENGRANAJE
CNICO
(ROTACIN A)
REDUCTOR
ROTACIN A
MOTOR
FUERA
ENGRANAJE PLANO DE
MOVlrvllENTO VERTICAL
ENGRANA,IE GIRATORIO PLANO
MOTOR
GIRATORIO
Figura 2.1. Ejemplo de esr!"!r# m$"#%&"# ' eleme%os "o%s&!&(os de !% ro)o*
(Cortesa de INSER Robtica.)
2.1. ESTRUCTURA MECNICA DE UN ROBOT
Mecnicamente, un robot est formado por una serie de elementos o eslabones unidos mediante
articulaciones que permiten un moimiento relatio entre cada dos eslabones consecutios. !a
constitucinfsica de la ma"or parte de los robots industriales #uarda cierta similitudcon la anatoma del
bra$o %umano, por lo que en ocasiones, para %acer referencia a los distintos elementos que componen el
robot, se usan t&rminos como cuerpo, bra$o, codo " mu'eca.
El moimiento de cada articulacin puede ser de despla$amiento, de #iro, o de una combinacin de
ambos. (e este modo son posibles los seis tipos diferentes de articulaciones que se muestran en la
)i#ura *.*, aunque, en la prctica, en los robots slo se emplean la de rotacin " la prismtica.
Morfologia del robot 17
Esfrica o Rtula
(3 GDL)
Planar
(2 GDL)
Tomillo
(1 GDL)
Prismtica
(1 GDL)
Rotacin
(1 GDL)
Cilindrica
(2GDL)
Fiura 2!2! Distintos tipos de articulaciones para robots.
Cada uno d" los mo#imi"ntos ind"$"ndi"nt"s %u" $u"d" r"ali&ar cada articulacin con r"s$"cto a la
ant"rior' s" d"nomina rado d" li("rtad (GDL)! En la Fiura 2!2 s" indica "l n)m"ro d" GDL d" cada
ti$o d" articulacin! El n)m"ro d" rados d" li("rtad d"l ro(ot #i"n" dado $or la suma d" los rados
d" li("rtad d" las articulacion"s %u" lo com$on"n! Pu"sto %u"' como s" *a indicado' las articulacion"s
"m$l"adas son )nicam"nt" las d" rotacin y $rismtica con un solo GDL cada una' "l n)m"ro d" GDL
d"l ro(ot su"l" coincidir con "l n)m"ro d" articulacion"s d" %u" s" com$on"!
El "m$l"o d" dif"r"nt"s com(inacion"s d" articulacion"s "n un ro(ot' da luar a dif"r"nt"s confi+
uracion"s' con caract"r,sticas a t"n"r "n cu"nta tanto "n "l dis"-o y construccin d"l ro(ot como "n
su a$licacin! Las com(inacion"s ms fr"cu"nt"s son las r"$r"s"ntadas "n la Fiura 2!3 dond" s"
ati"nd" )nicam"nt" a las tr"s $rim"ras articulacion"s d"l ro(ot' %u" son las ms im$ortant"s a la *ora
d" $osicionar su ".tr"mo "n un $unto d"l "s$acio!
Pu"sto %u" $ara $osicionar y ori"ntar un cu"r$o d" cual%ui"r man"ra "n "l "s$acio son n"c"sarios
s"is $arm"tros' tr"s $ara d"finir la $osicin y tr"s $ara la ori"ntacin' si s" $r"t"nd" %u" un ro(ot
$osicion" y ori"nt" su ".tr"mo (y con l la $i"&a o *"rrami"nta mani$ulada) d" cual%ui"r modo "n "l
"s$acio' s" $r"cisarn al m"nos s"is GDL!
En la Fiura 2!/ s" mu"stran los s"is GDL con %u" "st dotado "l ro(ot 0RC 1at" 12234512 d"
Fanuc' as, como sus articulacion"s y "sla(on"s!
En la $rctica' a $"sar d" s"r n"c"sarios los s"is GDL com"ntados $ara t"n"r total li("rtad "n "l
$osicionado y ori"ntacin d"l ".tr"mo d"l ro(ot' muc*os ro(ots industrial"s cu"ntan con slo cuatro o
cinco GDL' $or s"r "stos sufici"nt"s $ara ll"#ar a ca(o las tar"as %u" s" l"s "ncomi"ndan!
18 Fundamentos de robtica
Robot cartesiano
l r
~.
Robot cilndrico Robot esfrico o polar
Robot SCARA
Figura 2.3. Configur aciones ms fr ecuentes en r obots industr ial es.
Robot angular o antropomrfico
280'
540'
Figura 2.4. Gr ados de l iber tad del r obot ARC ate !20"8#!2.$Cor tes%a de &A'(C.)
Morfologia del robot 19
Robot plano con 3 GDL para
aumentar su maniobrabilidad
Robot plano con 3 GDL para
aumentar su volumen de trabajo
Figura 2.5. Robots planares redundantes.
Existen tambin casos opuestos, en los ue se precisan m!s de seis GDL para ue el robot pueda
tener acceso a todos los puntos de su entorno. "s#, si se trabaja en un entorno con obst!culos, el dotar
al robot de grados de libertad adicionales le permitir! acceder a posiciones $ orientaciones de su ex%
tremo a las ue, como consecuencia de los obst!culos, no &ubiera llegado con seis GDL. 'tra situa%
ci(n )recuente es la de dotar al robot de un GDL adicional ue le permita despla*arse a lo largo de un
carril, aumentando as# el volumen del espacio al ue puede acceder. +uando el n,mero de grados de
libertad del robot es ma$or ue los necesarios para reali*ar una determinada tarea se dice ue el robot
es redundante.
La Figura 2.5 representa las dos situaciones comentadas para el caso de robots planares a los ue
les bastar#a con 2 GDL para posicionar su extremo en cualuier punto del plano.
2.2. TRANSMISIONES Y REDUCTORES
Las transmisiones son los elementos encargados de transmitir el movimientodesde los actuadores &asta
las articulaciones. -e incluir!n junto con las transmisiones a los reductores, encargados de adaptar el
par $ la velocidadde la salida del actuador a los valores adecuados para el movimiento de los elementos
del robot.
20 Fundamentos de robtica
2.2.1. Transmisiones
Dado que un robot mueve su extremo con aceleraciones elevadas, es de gran importancia reducir al
mximo su momento de inercia. Del mismo modo, los pares estticos que deben vencer los actuadores
dependen directamente de la distancia de las masas al actuador. Por estos motivos se procura que los
actuadores, por lo general pesados, estn lo ms cerca posible de la base del robot. Esta circunstancia
obliga a utilizar sistemas de transmisin que trasladen el movimiento hasta las articulaciones,
Tabla 2.1. Sistemas de transmisin para robots
Entrada-Salida Denominacin nconvenientes !enta"as
#ircular-#ircular Engrana"e
#orrea dentada
#adena
Paralelogramo
#able
Pares altos
Distancia grande
Distancia grande
$olguras
%uido
&iro limitado
- De'ormabilidad
#ircular-(ineal )ornillo sin 'in
#remallera
%ozamiento
%ozamiento
Poca holgura
$olgura media
(ineal-#ircular Paral. articulado
#remallera
#ontrol di'*cil
%ozamiento $olgura media
especialmente a las situadas en el extremo del robot. +simismo, las transmisiones pueden ser utilizadas
para convertir movimiento circular en lineal o viceversa, lo que en ocasiones puede ser necesario.
Existen actualmente en el mercado robots industriales con acoplamiento directo entre acciona,
miento - articulacin, venta"osos, tal - como se detalla ms adelante, en numerosas ocasiones. Se
trata, sin embargo, de casos particulares dentro de la generalidad que en los robots industriales actua,
les supone la existencia de sistemas de transmisin "unto con reductores para el acoplamiento entre
actuadores - articulaciones.
Es de esperar que un buen sistema de transmisin cumpla una serie de caracter*sticas bsicas. debe
tener un tama/o - peso reducido, se ha de evitar que presente "uegos u holguras considerables - se
deben buscar transmisiones con gran rendimiento.
+unque no existe un sistema de transmisin espec*'ico para robots, s* existen algunos usados con
ma-or 'recuencia - que se recogen clasi'icados en la )abla 0.1. (a clasi'icacin se ha realizado en
base al tipo de movimiento posible en la entrada - la salida. lineal o circular. En la citada tabla tam,
bin quedan re'le"adas algunas venta"as e inconvenientes propios de algunos sistemas de transmisin.
Entre ellas cabe destacar la holgura o "uego. Es mu- importante que el sistema de transmisin a utili,
zar no a'ecte al movimiento que transmite, -a sea por el rozamiento inherente a su 'uncionamiento o
por las holguras que su desgaste pueda introducir. )ambin ha- que tener en cuenta que el sistema de
transmisin sea capaz de soportar un 'uncionamiento continuo a un par elevado, - a ser posible entre
grandes distancias.
Morfologia del robot 21
Figura 2.6. Telemanipulador TELBOT junto con la caja de transmisin por engranajes
situada en su base. (Cortesa de Walischmiller GmbH.
Las transmisiones ms habituales son aquellas que cuentan con movimiento circular tanto a la en
trada como a la salida. Incluidas en stas se hallan los engranajes, las correas dentadas y las cadenas.
La Figura 2.6 muestra el brazo articulado de un telemaniulador junto con los engranajes de transmi
si!n que transmiten el ar de los motores situados en su base a los eslabones.
2.2.2. Reductores
"n cuanto a los reductores, al contrario que con las transmisiones, s# que e$isten determinados sistemas
usados de manera re%erente en los robots industriales. "sto se debe a que a los reductores utilizados en
rob!tica se les e$ige unas condiciones de %uncionamiento muy restrictivas. La e$igencia de estas
caracter#sticas viene motivada or las altas restaciones que se le iden al robot en cuanto a recisi!n y
velocidad de osicionamiento. La &abla 2.2 muestra valores t#icos de los reductores ara rob!tica
actualmenteemleados.
'e buscan reductores de bajo eso, reducido tama(o, bajo rozamiento y que al mismo tiemo sean
caaces de realizar una reducci!n elevada de velocidad en un )nico aso. 'e tiende tambin a minimi
zar su momento de inercia, de negativa in%luencia en el %uncionamiento del motor, esecialmente
cr#tico en el caso de motores de baja inercia !"E##$%&O'()*.
Los reductores, or motivos de dise(o, tienen una velocidad m$ima de entrada admisible, que
como regla general aumenta a medida que disminuye el tama(o del motor. &ambin e$iste una limita*
22 Fundamentos de robtica
[2. 1]
cin en cuanto al par de salida nominal permisible (T2) que depende del par de entrada (TI) y de la
relacin de transmisin a travs de la relacin:
donde el rendimiento (11) puede llegar a ser cerca del 100 % Y la relacin de reduccin de velocidades
(CI ! velocidadde entrada" # ! velocidad de salida) var$a entre %0 y &00'
Tabla 2.2. Caractersticas de reductores para robtica
Caracter$sticas (alores t$picos
)elacin de reduccin
*eso y tama+o
,omento de inercia
(elocidades de entrada m-.ima
*ar de salida nominal
*ar de salida m-.imo
/uego angular
)igide0 torsional
)endimiento
%0 1i1 &00
0'1 + &02g
1132g m2
4000 -i- 5000 rpm
%5006m
57006m
08 2 11
1008 2000 6m9rad
:% % 1i1 7: %
*uesto que los robots traba;an en ciclos cortos que implican continuos arranques y paradas< es de
gran importancia que el reductor sea capa0 de soportar pares elevados puntuales' Tambin se busca
que el ;uego angular o backlash sea lo menor posible' =ste se de>ine como el -ngulo que gira el e;e de
salida cuando se cambia su sentido de giro sin que llegue a girar el e;e de entrada' *or ?ltimo< es im@
portante que los reductores para robtica posean una alta rigide0 torsional< de>inida como el par que
Aay que aplicar sobre elBe;e de salida para que< manteniendo bloqueado el de entrada< aqul gire un
-ngulo unitario'
Cos reductores para robots m-s com?nmente usados son los de las empresas Darmonic Erive
FDG),6IC174H y Cyclo1Ietriebebau FCYCC174H' Cos primeros< denominados DEJC (Kigura 2'5)< se
basan en una corona e.terior r$gida (Kigura 2':) con dentado interior (circular spline) y un vaso >le.i@
ble (flexspline) con dentado e.terior que engrana en el primero' Ll n?mero de dientes de ambos di>ie@
re en 1 o 2' Interiormente al vaso gira un rodamiento elipsoidal (wave generator) que de>orma el vaso<
poniendo en contacto la corona e.terior con la 0ona del vaso correspondiente al m-.imo di-metro de
la elipse' Gl girar el wave generator (al que se >i;a el e;e de entrada)< se obliga a que los dientes del
flexspline (>i;ado al e;e de salida) engranen uno a uno con los del circular spline, de modo que al Aa@
ber una di>erencia de dientes M ! 6< 1 6< < tras una vuelta completa del wave generator, elflexspline
solo Aabr- avan0ado M dientes' Ca relacin de reduccin conseguida ser-< por tanto< de ZlNf . Ln con@
creto< se consiguen reducciones de Aasta &20< con una Aolgura cercana a cero y capacidad de transmi@
sin de par de %520 6m'
Circular Spline Wave Generator
(WG)
Circular Spline
(CS)
Morfologia del robot 23
Flexspline
(FS)
Figura 2.7. Despiece HDUC.
(Cortesa de HarmonicDrive.)
Figura 2.8. Esquema HDUC.
(Cortesa de HarmonicDrive.)
Por otra parte el sistema de reduccin de los reductores CYCLO se basa en el movimiento cicloi
dal de un disco de curvas (Figura 2.9) movido por una excntrica solidaria al !rbol de entrada. Por
cada revolucin de la excntrica el disco de curvas avan"a un saliente rodando sobre los rodillos exte
riores. #ste avance arrastra a su ve" a los pernos del !rbol de salida $ue describir!n una cicloide den
tro de los %uecos del disco de curvas. La componente de traslacin angular de este movimiento se
corresponde con la rotacin del !rbol de salida. La relacin de reduccin viene& por tanto& determina
da por el n'mero de salientes. Para compensar los momentos de (lexin y de las masas de cada disco
en movimiento excntrico& generalmente se utili"an dos discos des(asados entre s) *+,-.
odillos exteriores
Disco de curvas
Exc!ntrica
"#r$ol de entrada
%ernos de arrastre
#r$ol de salida
Di$u&o Esquem'tico
Figura 2.9. eductor Cyclo. (Cortesa de Cyclo.)
24 Fundamentos de robtica
Existe tambin un tercer tipo de reductor denominado REDEX-ACBAR, de funcionamiento simi
lar al CYCLO, pero ue presenta la posibilidad de poder reducir el !ue"o an"ular desde el exterior a
te#ricamente un $alor nulo%
2.2.3. Accionamiento directo
Como se &a indicado anteriormente, desde &ace unos a'os existen en el mercado robots ue poseen lo
ue se &a dado en llamar accionamiento directo (Direct Drive DD(, en el ue el e!e del actuador se
conecta directamente a la car"a o articulaci#n, sin la utili)aci#n de un reductor intermedio *A+-,,-
*YO.CE/-,0- *1O+2A+O-,,- % Este trmino suele utili)arse exclusi$amentepara robots con accionamiento
elctrico%
Este tipo de accionamiento aparece a ra3) de la necesidad de utili)ar robots en aplicaciones ue
exi"en combinar "ran precisi#n con alta $elocidad% Los reductores introducen una serie de efectos
ne"ati$os, como son !ue"o an"ular, ro)amiento o disminuci#n de la ri"ide) del accionador, ue pue
den impedir alcan)ar los $alores de precisi#n 4 $elocidad reueridos%
Las principales $enta!as ue se deri$an de la utili)aci#n de accionamientos directos son las si
"uientes5
6 7osicionamiento r8pido 4 preciso, pues se e$itan los ro)amientos 4 !ue"os de las transmisiones
4 reductores%
6 Aumento de las posibilidades de controlabilidad del sistema a costa de una ma4or comple!idad%
6 9implificaci#n del sistema mec8nico al eliminarse el reductor%
El principal problema ue existe para la aplicaci#n pr8ctica de un accionamiento directo radica en
el motor a emplear% Debe tratarse de motores ue proporcionen un par ele$ado :unas ;<-=<< $eces
ma4or ue con reductor( a ba!as re$oluciones :las de mo$imiento de la articulaci#n( manteniendo la
m8xima ri"ide) posible%
Entre los motores empleados para accionamiento directo 4 ue cumplan estas caracter3sticas, se
encuentran los motores s3ncronos 4 de continua sin escobillas (brushless), ambos con imanes perma
nentes fabricados con materiales especiales :samario-cobalto(% 2ambin se utili)an motores de induc
ci#n de reluctancia $ariable% La necesaria utili)aci#n de este tipo de motores encarece notablemente el
sistema de accionamiento%
Otra cuesti#n importante a tener en cuenta en el empleo de accionamientos directos es la propia
cinem8tica del robot% Colocar motores, "eneralmente pesados 4 $oluminosos, !unto a las articulacio
nes, no es factible para todas las confi"uraciones del robot debido a las inercias ue se "eneran% El
estudio de la cinem8tica con la ue se dise'a el robot &a de tener en cuenta estos par8metros, estando
la estructura final ele"ida altamente condicionada por ellos% 7or este moti$o, los robots de acciona
miento directo son "eneralmente de tipo 9CARA, cu4o dise'o se corresponde bien con las necesida
des ue el accionamiento directo implica% Al eliminar el reductor tambin se disminu4e de forma con
siderable la resoluci#n real del codificador de posici#n acoplado al e!e, tal 4 como se detalla en el
ep3"rafe dedicado a sensores internos% Esto lle$a a la utili)aci#n en los DD de codificadores de posi
ci#n de mu4 alta resoluci#n%
. .
Morfologia del robot 25
' - :
Figura 2.10. Robot AdeptThree de accionamiento directo. (Cortesa de Adept Technology.)
El primer robot comercial con accionamiento directo se present en 1984. Se trataba de un robot
SCARA denominado AdeptOne, de la compaa norteamericana Adept Tecnolo!", #nc. A partir de
entonces este tipo de robots se a eco popular para aplicaciones $ue re$uieran robots con altas
prestaciones en %elocidad y posicionamiento &monta'e microelectrnico, corte de metal por l(ser,
etc.). *a +i!ura ,.1- muestra una .oto!ra.a del robot AdeptTree, de la misma compaa y tambi/n
de accionamiento directo. En la actualidad un robot con accionamiento directo puede lle!ar a aumen0
tar tanto la %elocidad como la precisin de manera si!ni.icati%a con respecto a a$uellos robots de
accionamiento tradicional.
2.3. ACTUADORES
*os actuadores tienen por misin !enerar el mo%imiento de los elementos del robot se!1n las rdenes
dadas por la unidad de control. *os actuadores utili2ados en robtica pueden emplear ener!a neum(tica,
idr(ulica o el/ctrica. Cada uno de estos sistemas presenta caractersticas di.erentes, siendo preciso
26 Fundamentos de robtica
r
evaluarlas a la hora de seleccionar el tipo de actuador ms conveniente. Las caractersticas a considerar
son entre otras:
Potencia.
Controlabilidad.
Peso y volumen.
Precisin.
Velocidad.
Mantenimiento.
Coste.
En este epgrafe se eaminan los tres tipos de actuadores citados! comparndolos en cuanto a las
caractersticas anteriores.
2.3.1. Actuadores neumticos
En ellos la fuente de energa es aire a presin entre " y #$ bar. Eisten dos tipos de actuadores
neumticos:
Cilindros neumticos.
Motores neumticos %de aletas rotativas o de pistones aiales&.
En los primeros se consigue el despla'amiento de un (mbolo encerrado en un cilindro! como con)
secuencia de la diferencia de presin a ambos lados de a*uel %+igura ,.##&. Los cilindros neumticos
pueden ser de simple o doble efecto. En los primeros! el (mbolo se despla'a en un sentido como re)
sultado del empu-e e-ercido por el aire a presin! mientras *ue en el otro sentido se despla'a como
consecuencia del efecto de un muelle %*ue recupera al (mbolo a su posicin de reposo&. En los cilin.
Figura 2.11. Esquema de cilindr o neumtico de doble efecto. (Cor tesa de FESTO.)
- - -
Morfologia del robot 27
Figura 2.12. Motor de paletas.
(Cortesa de FESTO.)
Figura 2.13. Motor de pistones axiales.
(Cortesa de CEDISA)
dros de doble efecto el aire apresin es el encargado de empujar al mbolo en las dos direcciones, al
poder ser introducido de forma arbitraria en cualquiera de las dos cmaras. En [DEPPERT- !" se e#plica
con ms detalle el funcionamiento de estos dispositi$os.
%ormalmente, con los cilindros neumticos slo se persigue un posicionamiento en los e#tremos
del mismo & no un posicionamiento continuo. Esto 'ltimo se puede conseguir con una $l$ula de dis(
tribucin )generalmente de accionamiento elctrico* que canali+a el aire a presin ,acia una de las dos
caras del mbolo alternati$amente. E#isten no obstante sistemas de posicionamiento continuo de ac(
cionamiento neumtico, aunque debido a su coste & calidad toda$-a no resultan competiti$os.
En los motores neumticos se consigue el mo$imiento de rotacin de un eje mediante aire a pre(
sin. .os dos tipos ms usados son los motores de aletas rotati$as & los motores de pistones a#iales.
En los primeros )/igura 0.10*, sobre el rotor e#cntrico estn dispuestas las aletas de longitud $aria(
ble. 2l entrar aire a presin en uno de los compartimentos formados por dos aletas & la carcasa, stas
tienden a girar ,acia una situacin en la que el compartimento tenga ma&or $olumen. .os motores de
pistones a#iales tienen un eje de giro solidario a un tambor que se $e obligado a girar por las fuer+as
que ejercen $arios cilindros, que se apo&an sobre un plano inclinado )/igura 0.13*.
4tro mtodo com'n ms sencillo de obtener mo$imientos de rotacin a partir de actuadores
neumticos, se basa en el empleo de cilindros cu&o mbolo se encuentra acoplado a un sistema de
pi5n- cremallera. El conjunto forma una unidad compacta que puede adquirirse en el mercado como
tal )/igura 0.1!*.
En general & debido a la compresibilidad del aire, los actuadores neumticos no consiguen una
buena precisin de posicionamiento. 6in embargo, su sencille+ & robuste+ ,acen adecuado su uso en
aquellos casos en los que sea suficiente un posicionamiento en dos situaciones diferentes )todo o na(
da*. Por ejemplo, son utili+ados en manipuladores sencillos, en apertura & cierre de pin+as o en deter(
minadas articulaciones de alg'n robot )como el mo$imiento $ertical del tercer grado de libertad de
algunos robots tipo 672R2*.
28 Fundamentos de robtica
Figura 2.14. Actuador rotativo tipo pin-cremallera. (Cortesa de REXROTH MECMAN.
Siempre debe tenerse en cuenta que el empleo de un robot con algn tipo de accionamiento
neumtico deber disponer de una instalacin de aire comprimido, incluyendo: compresor, sistema de
distribucin (tuberas, electrovlvulas), filtros, secadores, etc. No obstante, estas instalaciones
neumticas son frecuentes y eisten en muc!as de las fbricas donde se da cierto grado de automati"
#acin.
2.3.2. Actuadores hidrulicos
$ste tipo de actuadores no se diferencian funcionalmente en muc!o de los neumticos. $n ellos, en ve#
de aire se utili#an aceites minerales a una presin comprendida normalmente entre los %& y '&& bar,
llegndose en ocasiones.a superar los (&& bar. $isten, como en el caso de los neumticos, actuadores
del tipo cilindro y del tipo motores de aletas y pistones )*+,-.+/01234.
Sin embargo, las caractersticas del fluido utili#ado en los actuadores !idrulicos marcan ciertas
diferencias con los neumticos. $n primer lugar, el grado de compresibilidad de los aceites usados es
considerablemente inferior al del aire, por lo que la precisin obtenida en este caso es mayor. 5or
motivos similares, es ms fcil en ellos reali#ar un control continuo, pudiendo posicionar su e6e en
todo un rango de valores (!aciendo uso de servocontrol) con notable precisin. 7dems, las elevadas
presiones de traba6o, die# veces superiores a las de los actuadores neumticos, permiten desarrollar
elevadas fuer#as y pares.
5or otra parte, este tipo de actuadores presenta estabilidad frente a cargas estticas. $sto indica que
el actuador es capa# de soportar cargas, como el peso o una presin e6ercida sobre una superficie, sin
aporte de energa (para mover el 8mbolo de un cilindro sera preciso vaciar 8ste de aceite). /ambi8n
es destacable su elevada capacidad de carga y relacin potencia1peso, as como sus caractersticas de
autolubricacin ! robuste#.
Morfologia del robot 29
Frente a estas ventajas existen tambin ciertos inconvenientes. Por ejemplo, las elevadas presiones
a las que se trabaja propician la existencia de fugas de aceite a lo largo de la instalacin. Asimismo,
esta instalacin es ms complicada que la necesaria para los actuadores neumticos y mucho ms que
para los elctricos, necesitando de equipos de filtrado de partculas, eliminacin de aire, sistemas de
refrigeracin y unidades de control de distribucin.
!os accionamientos hidrulicos se usan con frecuencia en aquellos robots que deben manejar
grandes cargas. As, este tipo de accionamiento ha sido usado por robots como el "#$%A&' ())) y
*))) con capacidades de carga de +) y (), -g, respectivamente.
2.3.3. Actuadores elctricos
!as caractersticas de control, sencille. y precisin de los accionamientos elctricos ha hecho que sean
los ms usados en los robots industriales actuales.
/entro de los actuadores elctricos pueden distinguirse tres tipos diferentes 0123&456789:
; %otores de corriente continua </1=:
> 1ontrolados por inducido.
> 1ontrolados por excitacin.
; %otores de corriente alterna <A1=:
> 5ncronos.
> Asncronos.
; %otores paso a paso.
Motores de corriente continua (De)
5on los ms usados en la actualidad debido a su facilidad de control. 'n la Figura (.?, se muestra un
esquemade un motor /1 seccionado, en el que se pueden apreciar sus distintos elementos. 'n este caso,
el propio motor incluye un codificador de posicin <encoder= para poder reali.ar su control.
!os motores /1 estn constituidos por dos devanados internos, inductor e inducido, que se ali@
mentan con corriente continua:
; 'l inductor, tambin denominado devanado de excitacin, est situado en el estator y crea un
campo magntico de direccin fija, denominado de excitacin.
; 'l inducido, situado en el rotor, hace girar al mismo debido a la fuer.a de !orent. que aparece
como combinacin de la corriente circulante por l y del campo magntico de excitacin. 3e@
cibe la corriente del exterior a travs del colector de delgas, en el que se apoyan unas escobillas
de grafito.
Para que se pueda reali.ar la conversin de energa elctrica en energa mecnica de forma conti@
nua es necesario que los campos magnticos del estator y del rotor permane.can estticos entre s.
'sta transformacin es mxima cuando ambos campos se encuentran en cuadratura. 'l colector de
delgas es un conmutador sincroni.ado con el rotor encargado de que se mantenga el ngulo relativo
entre el campo del estator y el creado por las corrientes rotricas. /e esta forma se consigue transfor6
Encoder ~ ~" __,. .._... . -'------,~j
30 Fundamentos de robtica
Figura 2.15. Esquema de motor OC seccionado con indicacin de sus distintos componentes.
(Cortesa de maxon motor.)
mar automticamente, en funcin de la velocidad de la mquina, la corriente continua que alimenta al
motor en corriente alterna de frecuencia variable en el inducido. Este tipo de funcionamiento se cono
ce con el nombre de autopilotado.
Al aumentar la tensin del inducido aumenta la velocidad de la mquina. Si el motor est alimen
tado a tensin constante, se puede aumentar la velocidad disminuyendo el flujo de ecitacin. !ero
cuanto ms d"bil sea el flujo, menor ser el par motor que se puede desarrollar para una intensidad de
inducido constante. En el caso de control por inducido, la intensidad del inductor se mantiene cons
tante, mientras que la tensin del inducido se utili#a para controlar la velocidad de $iro. En los con
trolados por ecitacin se act%a al contrario.
&el estudio de ambos tipos de motores, y reali#ndose las simplificaciones correspondientes, se
obtiene que la relacin entre tensin de control y velocidad de $iro 'funcin de transferencia(, res
ponde a un sistema de primer orden en los controlados por inducido, mientras que en el caso de los
motores controlados por ecitacin, esta relacin es la de un se$undo orden ')i$ura *.+,(. -er el ep.
$rafe /.,.+ para ms detalles.
Adems, en los motores controlados por inducido se produce un efecto estabili#ador de la veloci
dad de $iro ori$inado por la realimentacin intr.nseca que posee a trav"s de la fuer#a contraelectro-
Morfologia del robot 31
Control
por excitacin
ee
e e
le
1
1 _. . .
~
. . .
. . .
, . .
11'"
-
. . . .
R. + L. s Js+B
S
. e
Control
por inducido
e
~I!I--I~I
Js+B
-
s
Figura 2.16. Motor OC. Esquema y funciones de transferencia.
motriz. or estos moti!os" de los dos tipos de motores De es el controlado por inducido el #ue se usa
en el accionamiento de ro$ots.
ara me%orar el comportamiento de este tipo de motores" el campo de excitacin se &enera me'
diante imanes permanentes" con lo #ue se e!itan (luctuaciones del mismo. )stos imanes son de alea'
ciones especiales como samario-co$alto. *dem+s" para disminuir la inercia #ue poseer,a un rotor $o'
$inado" #ue es el inducido" se construye -ste mediante una serie de espiras seri&ra(iadas en un disco
plano .!er /i&ura 0. 112. )n contrapartida" este tipo de rotor no posee apenas masa t-rmica lo #ue au'
menta los pro$lemas de calentamiento por so$recar&a.
32 Fundamentos de robtica
Figura 2.17. MotorDC de imanes permanentes controlado por inducido.
Las velocidades de rotacin que se consiguen con estos motores son del orden de 1000 a 3000
r.p.m., con un comportamiento muy lineal y bajas constantes de tiempo. Las potencias que pueden
manejar pueden llegar a los 10 kW.
Como se ha indicado, los motores C son controlados mediante re!erencias de velocidad. "stas
normalmente son seguidas mediante un bucle de realimentacin de velocidad analgico que se cierra
mediante una electrnica espec#!ica $accionador del motor%. &obre este bucle de velocidad se coloca
otro de posicin, en el que las re!erencias son generadas por la unidad de control $microprocesador%
en base al error entre la posicin deseada y la real.
'l motor de corriente continua presenta el inconveniente del obligado mantenimiento de las esco(
billas. )or otra parte, no es posible mantener el par con el rotor parado m*s de unos segundos, debido
a los calentamientos que se producen en el colector.
)ara evitar estos problemas, se han desarrollado en los +ltimos a,os motores sin escobillas
(brushless). 'n -stos, los .imanesde e/citacin se sit+an en el rotor y el devanado de inducido en el
estator, con lo que es posible convertir la corriente mediante interruptores est*ticos, que reciben la
se,al de conmutacin a trav-s de un detector de posicin del rotor.
Motores paso a paso
Los motores paso a paso generalmente no han sido considerados dentro de los accionamientos
industriales, debido principalmente a que los pares para los que estaban disponibles eran muy peque,os
y los pasos entre posiciones consecutivas eran grandes. 'sto limitaba su aplicacin a controles de
posicin simples. 'n los +ltimos a,os se han mejorado notablemente sus caracter#sticas t-cnicas,
especialmente en lo relativo a su control, lo que ha permitido !abricar motores paso a paso capaces de
desarrollarpares su!icientes en peque,os pasos para su uso como accionamientosindustriales.
Morfologia del robot 33
Existen tres tipos de motores paso a paso [BARRIENTOS-95]:
De imanes permanentes.
De rel!tan!ia "aria#le.
$%#ridos.
En los primeros& de imanes permanentes '(i)ra *.+,-& el rotor& .e posee na polari/a!i0n
ma)n1ti!a !onstante& )ira para orientar ss polos de a!erdo al !ampo ma)n1ti!o !reado por las 2ases
del estator. En los motores de rel!tan!ia "aria#le& el rotor est3 2ormado por n material 2erro4
ma)n1ti!o .e tiende a orientarse de modo .e 2a!ilite el !amino de las l%neas de 2er/a del !ampo
ma)n1ti!o )enerado por la #o#inas de estator. 5os motores 6%#ridos !om#inan el modo de 2n!iona4
miento de los dos tipos anteriores.
En los motores paso a paso la se7al de !ontrol son trenes de plsos .e "an a!tando rotati"amente
so#re na serie de ele!troimanes dispestos en el estator& 8or !ada plso re!i#ido& el rotor del motor
)ira n determinado n9mero dis!reto de )rados.
8ara !onse)ir el )iro del rotor en n determinado n9mero de )rados& las #o#inas del estator de#en
ser ex!itadas se!en!ialmente a na 2re!en!ia .e determina la "elo!idad de )iro. 5as iner!ias pro4
pias del arran.e y parada 'amentadas por las 2er/as ma)n1ti!as en e.ili#rio .e se dan !ando
est3 parado- impiden .e el rotor al!an!e la "elo!idad nominal instant3neamente& por lo .e 1sta& y
por tanto la 2re!en!ia de los plsos .e la 2i:a& de#e ser amentada pro)resi"amente.
- +
Figura 2.18. Esquema de un motor paso a paso de imanes permanentes con cuatro fases.
34 Fundamentos de robtica
Para simplificar el control de estos motores existen circuitos especializados que a partir de tres se,
ales (tren de pulsos, sentido de giro e inhibicin) generan, a travs de una etapa lgica, las secuen
cias de pulsos que un circuito de conmutacin distribuye a cada fase
!u principal venta"a con respecto a los servomotores tradicionales es su capacidad para asegurar
un posicionamiento simple y exacto Pueden girar adem#s de forma continua, con velocidad variable,
como motores s$ncronos, ser sincronizados entre s$, obedecer a secuencias comple"as de funciona
miento, etc !e trata al mismo tiempo de motores muy ligeros, fiables y f#ciles de controlar, pues al
ser cada estado de excitacin del estator estable, el control se realiza en bucle abierto, sin la necesidad
de sensores de realimentacin
%ntre los inconvenientes se puede citar que su funcionamiento a ba"as velocidades no es suave, y
que existe el peligro de prdida de una posicin por traba"ar en bucle abierto &ienden a sobrecalen
tarse traba"ando a velocidades elevadas y presentan un l$mite en el tamao que pueden alcanzar
!u potencia nominal es ba"a y su precisin (m$nimo #ngulo girado) llega t$picamente hasta ',() !e
emplean para el posicionado de e"es que no precisan grandes potencias (giro de pinza) o para robots
pequeos (educacionales)* tambin son muy utilizados en dispositivos perifricos del robot, como
mesas de coordenadas
+otores de corriente alterna (,-)
%ste tipo de motores no ha tenido aplicacin en el campo de la robtica hasta hace unos aos, debido
fundamentalmentea la dificultad de su control !in embargo, las me"oras que se han introducido en las
m#quinas s$ncronas hacen que se presenten como un claro competidor de los motores de corriente
continua %sto se debe principalmente a tres factores.
Figura 2.19. Gama de motores brushless con su etapa de control. (Cortesa de Baldar.)
Morfologia del robot 35
La construccin de rotores sncronos sin escobillas.
Uso de convertidores estticos que permiten variar la frecuencia (y as la velocidad de giro) con
facilidad y precisin.
Empleo de la microelectrnica que permite una gran capacidad de control.
El inductor se sita en el rotor y est constituido por imanes permanentes mientras que el induci!
do situado en el estator est formado por tres devanados iguales decalados i"## el$ctricos y se ali!
menta con un sistema trifsico de tensiones. Es preciso resaltar la similitud que e%iste entre este es!
quema de funcionamiento y el del motor sin escobillas (&igura ".'().
En los motores sncronos la velocidad de giro depende nicamente de la frecuencia de la tensin
que alimenta el inducido. )ara poder variar $sta con precisin el control de velocidad se reali*a me!
diante un convertidor de frecuencia. )ara evitar el riesgo de p$rdida de sincronismo se utili*a un sen!
sor de posicin continuo que detecta la posicin del rotor y permite mantener en todo momento el
ngulo que forman los campos del estator y del rotor. Este m$todo de control se conoce como au!
tosncrono o autopilotado.
El motor sncrono autopilotado e%citado con imn permanente tambi$n llamado motor senoidal
no presenta problemas de mantenimiento debido a que no posee escobillas y tiene una gran capacidad
de evacuacin de calor ya que los devanados estn en contacto directo con la carcasa. El control de
posicin se puede reali*ar sin la utili*acin de un sensor e%terno adicional aprovec+ando el detector
Tabla 2.3. Caractersticas de distintos tipos de actuadores para robots
,eumtico -idrulico El$ctrico
Energa . /orriente el$ctrica
0pciones
1enta2as
3esventa2as
. 4ire a presin
(56'# bar)
. /ilindros
.7otor de paletas
. 7otor de pistn
. 8aratos
. 9pidos
. :encillos
. 9obustos
. 3ificultad de
control continuo
. ;nstalacin especial
(compresor filtros)
.9uidoso
. 4ceite mineral
(5#6'## bar )
. /ilindros
. 7otor de paletas
.7otor de pistones a%iales
.9pidos
. 4lta relacin potencia6peso
. 4utolubricantes
. 4lta capacidad de carga
.Estabilidad frente a
cargas estticas
. 3ifcil mantenimiento
. ;nstalacin especial
(filtros eliminacin aire)
. &recuentes fugas
. /aros
. /orriente continua
. /orriente alterna
.7otor paso a paso
. )recisos
.&iables
. &cil control
. :encilla instalacin
. :ilenciosos
. )otencia limitada
36 Fundamentos de robtica
de posicin del rotor que posee el propio motor. Adems permite desarrollar, a igualdad de peso, una
potencia mayor que el motor de corriente continua. En la actualidad diversos robots industriales em
plean este tipo de accionamientos con notables ventajas frente a los motores de corriente contnua.
En el caso de los motores asncronos, no se ha conseguido resolver satisfactoriamente los proble
mas de control que presentan. Esto ha hecho que hasta el momento no tengan aplicacin en robtica.
Corno resumen de los tipos de actuadores empleados en robtica, en la abla !." se presenta un
cuadro comparativo de #stos.
2.4. SENSORES INTERNOS
$ara conseguir que un robot realice su tarea con la adecuada precisin, velocidad e inteligencia, ser
precisoque tenga conocimientotanto de su propio estado como del estado de su entorno. %a informacin
relacionada con su estado &fundamentalmente la posicin de sus articulaciones' la consigue con los
denominados sensores internos, mientras que la que se refiere al estado de su entorno, se adquiere con
los sensorese(ternos.
En este epgrafe se tratar )nicamente de los sensores internos. *nformacin sobre sensores e(ternos
puede verse en te(tos y bibliografa especiali+ada en visin artificial [GoNZALEz-92], sensores de fuer+a
,C-E./0123, tacto ,-.//E%0243, distancia o telemetra. %a informacin que la unidad de control del robot
Tabla 2.4. Tipos de sensores internos de robots
$resencia
5 *nductivo
5 Capacitivo
5 Efecto hall
5 C#lula -eed
5 6ptico
5 .ltrasonido
5 Contacto
Analgicos
5$otencimetros
5 -esolver
5 /incro
5 *nductosyn
. %78 $osicin
8igitales
5 Encoders absolutos
5 Encoders incrementales
5-egla ptica
7elocidad 5 acogeneratri+
- -
Morfologia del robot 37
puede obtener sobre el estado de su estructura mecnica es fundamentalmente la relativa a su posicin y
velocidad. En la Tabla 2.4 se resumen los sensores ms comnmente empleados para obtener informa
cin de presencia, posicin y velocidad en robots industriales, explicados con ms detalle en !"##$s%&'(
y )"*+T,-"#%'.(. /e comentan a continuacin los ms si0nificativos.
2.4.1. /ensores de posicin
!ara el control de posicin an0ular se emplean fundamentalmente los denominados encoders y
resolvers. #os potencimetros dan ba2as prestaciones por lo 3ue no se emplean salvo en contadas
ocasiones 4robots educacionales, e2es de poca importancia5.
*odificadores an0ulares de posicin 4encoders5
#os codificadores pticos o encoders incrementales constan, en su forma ms simple, de un disco
transparente con una serie de marcas opacas colocadas radialmente y e3uidistantes entre s67 de un
sistema de iluminacin en el 3ue la lu8 es colimada de forma correcta, y de un elemento fotorreceptor
49i0ura 2.2.5. El e2e cuya posicin se 3uiere medir va acoplado al disco trasparente. *on esta
disposicin, a medida 3ue el e2e 0ire se irn 0enerando pulsos en el receptor cada ve8 3ue la lu8 atraviese
cada marca, y llevando una cuenta de estos pulsos es posible conocer la posicin del e2e.
Existe, sin embar0o, el problema de no saber si en un momento dado se est reali8ando un 0iro en un
sentido o en otro, con el peli0ro 3ue supone no estar contando adecuadamente. :na solucin a este pro
blema consiste en disponer de otra fran2a de marcas, despla8ada de la anterior de manera 3ue el tren de
pulsos 3ue con ella se 0enere est; despla8ado '.< el;ctricos con respecto al 0enerado por la primera
=arca
de cero
9i0ura 2.2.. Disposicin de un codificador ptico (encoder) incremental.
38 Fundamentos de robtica
Figura 2.21. Disco codificado con cdigo de Gray para utilizar en encoders absolutos.
(Cortesa de HEIDENHAIN.)
franja. De esta manera, con un circuito relativamente sencillo es posible obtener una seal adicional que
indique cul es el sentido de giro, y que acte sobre el contador correspondiente indicando que incre
mente o decrementela cuenta que se est reali!ando.
"s necesario adems disponer de una marca de referencia sobre el disco que indique que se #a dado
una vuelta completa y que, por tanto, se #a de empe!ar la cuenta de nuevo. "sta marca sirve tambin para
poder comen!ar a contar tras recuperarse de una ca$da de tensi%n.
&a resoluci%n de este tipo de sensores depende directamente del nmero de marcas que se pueden
poner f$sicamente en el disco. 'n mtodo relativamente sencillo para aumentar esta resoluci%n es, no
solamente contabili!ar los flancos de subida de los trenes de pulsos, sino contabili!ar tambin los de
bajada, incrementandoas$ por cuatro la resoluci%n de captador, pudindose llegar, con ayuda de circuitos
adicionales,#asta 1((.(((pulsos por vuelta.
"l funcionamientobsico de los codificadores o encoders absolutos es similar al de los incrementales.
)e tiene una fuente de lu! con las lentes de adaptaci%n correspondientes, un disco graduado y unos foto
rreceptores. "n este caso, el disco transparente se divide en un nmero determinadode sectores *potencia
de 2+, codificndose cada uno de ellos segn un c%digo binario c$clico *normalmente c%digo ,ray+ que
queda representadopor !onas transparentes y opacas dispuestas radialmente*Figura 2.21+.
-o es necesario a#ora ningn contador o electr%nica adicional para detectar el sentido de giro, pues
cada posici%n*sector+ es codificado de forma absoluta. )u resoluci%n es fija, y vendr dada por el nme
ro de anillos que posea el disco graduado. .esoluciones #abituales van desde 2/ a i9 bits *desde 201 a
022.2//posiciones distintas+.
-ormalmente los sensores de posici%n se acoplan al eje del motor. 3onsiderando que en la mayor
parte de los casos entre el eje del motor y el de la articulaci%n se sita un reductor de relaci%n -, cada
movimientode la articulaci%n se ver multiplicadopor - al ser medido por el sensor. 4ste aumentar as$
su resoluci%nmultiplicndolapor -.
"ste problema se soluciona en los encoders absolutos con la utili!aci%n de otro encoder absoluto ms
pequeo conectado por un engranaje reductor al principal, de manera que cuando ste gire un vuelta
Morfologia del robot 39
\
1 1
! \
completa, el codificado adicional avanzar una posicin. Son los denominados encoders absolutos mul
tivuelta.
Esta misma circunstancia originar que en el caso de los codificadores incrementales la seal de refe
rencia o marca de cero, sea insuficiente para detectar el punto origen para la cuenta de pulsos, pues abr
! posibles puntos de referencia para un giro completo de la articulacin. "ara distinguir cul de ellos es
el correcto se suele utilizar un detector de presencia denominado de sincronismo, acoplado directamente
al eslabn del robot que se considere. #uando se conecta el robot desde una situacin de apagado, es
preciso e$ecutar un procedimiento de b%squeda de referencias para los sensores &sincronizado'. (urante
su e$ecucin se leen los detectores de sincronismo que detectan la presencia o ausencia del eslabn del
robot. #uando se detecta la conmutacin de presencia a ausencia de pieza, o viceversa, se atiende al en
coder incremental, tomndose como posicin de origen la correspondiente al primer pulso de marca de
cero que aquel genere.
)os encoders pueden presentar problemas mecnicos debido a la gran precisin que se debe tener en
su fabricacin. )a contaminacin ambiental puede ser una fuente de interferencias en la transmisin
ptica. Son dispositivos particularmente sensibles a golpes y vibraciones, estando su margen de tempe
ratura de traba$o limitado por la presencia de componentes electrnicos.
I )
E$ede giro
*sen&rot' +,,
-igura ..... Esquema de funcionamiento de un resolver.
#aptadores angulares de posicin &s/ncro0resolvers'
)a otra alternativaen sensores de posicin para robots la representan los resolvers y los sincroresolvers,
tambi1n llamados sincros. Se trata de captadores analgicos con resolucin tericamente infinita. El
funcionamientode los resolvers se basa en la utilizacin de una bobina solidaria al e$e e2citada por una
portadora, generalmentecon 3445z, y por dos bobinas fi$as situadas a su alrededor &-igura ....'.
40 Fundamentos de robtica
El giro de la bobina mvil hace que el acoplamiento con las bobinas fijas vare, consiguiendo que la
seal resultante en stas dependa del seno del ngulo de giro. La bobina mvil excitada con tensin
sen!rot"# giradaun ngulo $ induce en las bobinas fijas situadas en cuadratura las siguientestensiones%
VI & Vsen!rot" sen '
( & sen!rot"cos'
)(.(*
que la llamadarepresentacindel ngulo $ en formato resolver.
El funcionamientode los sincros es anlogo al de los resolvers, excepto que las bobinas fijas forman
un sistema trifsico en estrella. +ara un giro $ de la bobina mvil excitada con tensin sen!et), admi,
tiendo que los acoplamientos # los desfases son los mismos para todos los devanados, se obtienen las
siguientestensiones entre las fases del estator%
-. &./ . cos!rot" sen '
.( &./ . cos!rot" sen! ' +0(10)
(0 &./ . cos!rot" sen! ' +(211"
)(..*
que es la llamadarepresentacin del ngulo $ en formato sincro.
El cambio de formato sincro a formato resolver o viceversa es inmediato, #a que se puede pasar de
uno a otro a travs de la llamada red de 'cott o transformador de 'cott, de funcionamientobidireccional.
+ara poder tratar en el sistema de control la informacin generada por los resolvers # los sincros es
necesario convertir las seales analgicas en digitales. +ara ello se utili3an los llamados convertidores
resolver4digital !546", que tradicionalmente se basan en dos tipos de estructuras distintas% seguimiento
!trac7ing"# muestreo !sampling".
8mbos captadores son de tipo absoluto en cada vuelta del eje acoplado a ellos. Entre sus ventajas
destacan su buena robuste3 mecnica durante el funcionamiento # su inmunidad a contaminacin, hume,
dad, altas temperaturas # vibraciones. 6ebido a su reducido momento de inercia, imponen poca carga
mecnica al funcionamientodel eje.
La 9abla (.: presenta una comparacin entre distintos tipos de sensores de posicin angular aten,
diendo a diversosparmetros de funcionamiento. 'e comenta brevemente a continuacin alguno de ellos.
Tabla 2.5. Comparacin entre distintos sensores de posicin angular
5obuste3 5ango 5esolucin
mecnica dinmico
Estabilidad
trmica
Encoder buena mala media buena
5esolver buena buena buena buena
+otenciometro regular mala mala mala
Morfologia del robot 41
Dado el carcter continuo de la seal, la resolucin de los resolvers es tericamente infinita. Bien es
verdad que depende en la mayora de las ocasiones de una electrnica asociada, lo que limita la precisin
de forma prctica. En el caso de los codificadores pticos la resolucin viene limitada por el nmero de
secciones opaco/transparentesque se utilicen.
La exactitud esttica, definida como la diferencia entre las posicin fsica del ee y la seal el!ctrica
de salida, es relativamente alta tanto en resolvers como en codificadores pticos. El ran"o dinmico se
encuentra ms limitado en el caso de los codificadores pticos o di"itales, no as en los resolvers donde
con conversiones#$Dadecuadas se puede tra%aar con velocidades superiores a las &''' rpm.
(ensores lineales de posicin )L*D+ e $nductosyn,
Entre los sensores de posicin lineales destaca el transformador diferencial de variacin lineal )L*D+,
de%ido a su casi infinita resolucin, poco ro-amiento y alta repeti%ilidad. (u funcionamiento se %asa en
la utili-acin de un ncleo de material ferroma"n!tico unido al ee cuyo movimiento se quiere medir.
Este ncleo se mueve linealmente entre un devanado primario y dos secundarios, .aciendo con su
movimiento que vare la inductancia entre ellos. La /i"ura 0.01 presenta un %reve esquema de su
funcionamiento.
Los dos devanados secundarios conectados en oposicin serie ven cmo la induccin de la tensin
alterna del primario, al variar la posicin del ncleo, .ace crecer la tensin en un devanado y disminuirla
en el otro. Del estudio de la tensin Eo se deduce que !sta es proporcional a la diferencia de inductancias
mutuas entre el devanado primario con cada uno de los secundarios, y que por tanto depende linealmente
del despla-amientodel vsta"o solidario al ncleo.
2dems de las ventaas sealadas, el L*D+ presenta una alta linealidad, "ran sensi%ilidad y una res3
puesta dinmica elevada. (u uso est ampliamente extendido, a pesar del inconveniente de poder ser
aplicadonicamente en la medicin de pequeos despla-amientos.
*sen)rot, 'V
4 5
/i"ura 0.01. Esquema de funcionamiento de un LVDT.
'~,/
42 Fundamentos de robtica
Otros sensores lineales que tambin se emplean con relativa frecuencia son las denominadas reglas
pticas (equivalentesa los codificadores pticos angulares) y las reglas magnticas o Inductosyn (marca
registrada de Farrand Industries Inc.). El funcionamiento del Inductosyn es similar al del resolver con la
diferencia de que el rotor desliza linealmente sobre el estator, siendo la forma de los devanados la repre
sentada en la Figura !.!". El estator se encuentra e#citado por una tensin conocida que induce en el
rotor dependiendode su posicin relativa una tensin $s%
&!."'
v
. . .
Figura 2.24. Esquema de funcionamiento de un Inductosyn.
2.4.2. Sensores de velocidad
(a captacin de la velocidad se )ace necesaria para me*orar el comportamiento din+mico de los
actuadores del robot. (a informacin de la velocidad de movimiento de cada actuador (que tras el
reductor es la de giro de la articulacin) se realimenta normalmente a un bucle de control analgico
implementado en el propio accionador del elemento motor. ,o obstante, en ocasiones en las que el
sistema de control del robot lo e#i*a, la velocidad de giro de cada actuador es llevada )asta la unidad de
control del robot.
,ormalmente, y puesto que el bucle de control de velocidad es analgico, el captador usado es una
tacogeneratrizque proporciona una tensin proporcional a la velocidad de giro de su e*e (valores t-picos
pueden ser ./milivoltios por rpm).
Morfologia del robot 43
!~
!
Otra posibilidad, usada para el caso de que la unidad de control del robot precise valorar la velocidad
de giro de las articulaciones, consiste en derivar la informacin de posicin que sta posee.
2.4.3. Sensores de presencia
Este tipo de sensor es capaz de detectar la presencia de un obeto dentro de un radio de accion
determinado. Esta deteccin puede !acerse con o sin contacto con el obeto. En el segundo caso se
utilizan diferentes principios f"sicos para detectar la presencia, dando lugar a los diferentes tipos de
captadores #ver $abla 2.4%. En el caso de deteccin con contacto, se trata siempre de un interruptor,
normalmente abierto o normalmente cerrado seg&n interese, actuado mec'nicamente a travs de un
v'stago u otro dispositivo. (os detectores de presencia se utilizan en robtica principalmente como
au)iliares de los detectores de posicin, para indicar los l"mites de movimiento de las articulaciones *
permitir localizar la posicin de referencia de cero de stos en el caso de que sean incrementales.
+dem's de esta aplicacin, los sensores de presencia se usan como sensores e)ternos, siendo mu*
sencillos de incorporar al robot por su car'cter binario * su costo reducido. (os detectores inductivos
permiten detectar la presencia o contar el n&mero de obetos met'licos sin necesidad de contacto. ,re-
sentan el inconveniente de distinto comportamiento seg&n del tipo de metal del que se trate. El mismo
tipo de aplicacin tiene los detectores capacitivos, m's voluminosos, aunque en este caso los obetos a
detectar no precisan ser met'licos. En cambio presentan problemas de trabao en condiciones !&medas *
con puestas a tierra defectuosas.
(os sensores basados en el efecto .all detectan la presencia de obetos ferromagnticos por la defor-
macin que estos provocan sobre un campo magntico. (os captadores pticos, sin embargo, pueden
detectar la refle)in del ra*o de luz procedente del emisor sobre el obeto.
$abla 2./. Sistemas de sujecin para robots
$ipos de suecin +ccionamiento 0so
,inza de presin
. desp. angular
. desp. lineal
1eum'tico o elctrico $ransporte * manipulacin de piezas sobre las
que no importe presionar.
,inza de enganc!e 1eum'tico o elctrico ,iezas de grandes dimensiones o sobre las que
no se .puede eercer presin.
2uerpos con superficie lisa poco porosa #cristal,
pl'stico, etc.%.
,iezas ferromagnticas.
3entosas de vac"o 1eum'tico
Electroim'n Elctrico
44 Fundamentos de robtica
2.5. ELEMENTOS TERMINALES
Los elementos terminales, tambin llamados efectores finales (end effector) son los encargados de
interaccionar directamente con el entorno del robot. Pueden ser tanto elementos de aprehensin como
herramientas.
Si bien un mismo robot industrial es, dentro de unos lmites lgicos, verstil y readaptable a una
gran variedad de aplicaciones, no ocurre as con los elementos terminales, que son en muchos casos
especficamente diseados para cada tipo de trabajo.
Se puede establecer una clasificacin de los elementos terminales atendiendo a si se trata de un
elemento de sujecin o de una herramienta. Los primeros se pueden clasificar segn el sistema de
sujecin empleado. !n la "abla #.$. se representan estas opciones, as como los usos ms frecuentes.
Los elementos de sujecin se utili%an para agarrar & sostener los objetos & ' se suelen. denominar
pin%as. Se distingue entre las que utili%an dispositivos de agarre mecnico ()igura #.#*+, & las que
utili%an algn otro tipo de dispositivo (ventosas, pin%as magnticas, adhesivas, ganchos, etc.+.
!n la eleccin o diseo de una pin%a se han de tener en cuenta diversos factores. !ntre los que
afectan al tipo de objeto & de manipulacin a reali%ar destacan el peso, la forma, el tamao del objeto
& la fuer%a que es necesario ejercer & mantener para sujetarlo. !ntre los parmetros de la pin%a cabe
destacar su peso (que afecta a las inercias del robot+, el equipo de accionamiento & la capacidad de
control.
!l accionamiento neumtico es el ms utili%ado por ofrecer ma& ores ventajas en simplicidad, pre,
cio & fiabilidad, aunque presenta dificultades de control de posiciones intermedias. !n ocasiones se
utili%an accionamientos de tipo elctrico.
Figura 2.25. Pinza neumtica de dedos paralelos. (Cortesa de FESTO.)
Morfologia del robot 45
Figura 2.26. Pistolas neumticas de pulverizacin de pintura. (Cortesa de Kremlin.)
Figura 2.27. Pinzas de soldadura con transformador incorporado.
De accionamiento por tijera y rectilneo. (Cortesa de ARO.)
En la pinza se suelen situar sensores para detectar el estado de la misma (abierto o cerrado). Se
pueden incorporar a la pinza otro tipo de sensores para controlar el estado de la pieza, sistemas de
visin que proporcionen datos geomtricos de los objetos, detectores de proximidad, sensores fuerza
par, etc.
46 Fundamentos de robtica
Tabla 2.7. Herramientas terminales para robots
Tipo de herramienta Comentarios
Pinza soldadura por puntos
Soplete soldadura al arco
Cucharn para colada
Atornillador
Fresa-lija
Pistola de pintura
Can lser
Can de agua a presin
Dos electrodos que se cierran sobre la pieza a soldar
Aportan el !lujo de electrodo que se !unde
Para trabajos de !undicin
Suelen incluir la alimentacin de tomillos
Para per!ilar" eliminar rebabas" pulir" etc
Por pul#erizacin de la pintura
Para corte de materiales" soldadura o inspeccin
Para corte de materiales
Como se ha indicado" el elemento terminal de aprehensin debe ser diseado con !recuencia a me$
dida para la aplicacin %&isten ciertos elementos comerciales que sir#en de base para la pinza" siendo
posible a partir de ellos disear e!ectores #lidos para cada aplicacin concreta Sin embargo" en otras
ocasiones el e!ector deber ser desarrollado 'ntegramente" constitu(endo su coste un porcentaje im$
portante dentro del total de la aplicacin
%n muchas aplicaciones el robot ha de realizar operaciones que no consisten en manipular objetos"
sino que implican el uso de una herramienta %l tipo de herramientas con que puede dotarse a un robot
es mu( amplio )a Figura **+ ( la Figura **, muestran" respecti#amente" dos pistolas de pul#eriza$
cin de pintura ( dos pinzas de soldadura por puntos -ormalmente" la herramienta est !ijada r'gida$
mente al e&tremo del robot aunque en ocasiones se dota a .ste de un dispositi#o de cambio au$
tomtico" que permita al robot usar di!erentes herramientas durante su tarea )a Tabla *, enumera
algunas de las herramientas ms !recuentes %n [GROOVER-89] ( [FERRAT-86] puede encontrarse un
estudio detallado sobre distintas herramientas ( pinzas para robots
Aparte de estos elementos de sujecin ( herramientas ms o menos con#encionales" e&isten intere$
santes desarrollos e in#estigaciones" muchos de ellos orientados a la manipulacin de objetos compli$
cados y delicados Por ejemplo" e&isten di#ersas realizaciones de pinzas dotadas de tacto o de dedos
con !alanges
2.6. BIBLIOGRAFA
/A--001An" C2" At3enson" C4 ( 2ollerbach" 56" 7Direct Dri#e Arms7" en8 Model-based Control
of a Robot Manipulator, The 69T Press" :;00
/<A==9%-T4S-;>1 <arrientos" A" Pe'n" )F" Carrera" 5" Automatizacin de la fabricacin. Trans
ductores, actuadores y autmatas programables, Seccin de Publicaciones %TS9 9ndustriales de
6adrid" ?ni#ersidad Polit.cnica de 6adrid" :;;>
Morfologia del robot 47
[CoRTs-89] Corts Cherta, M., Curso moderno de mquinas elctricas rotativas. Cuatro tomos.
Editores Tcnicos Asociados, Barcelona, 1989.
[C!"#A-9$] Codina, E., %&er'oactuadores neum(ticos%, Automtica e Instrumentacin, $$), ** 118-
1$9, 199$.
[C!"#A-9+] Codina, E., %&er'oactuadores oleohidr(ulicos%, Automtica e Instrumentacin, $+,, **
1-1-18$,199+.
[CREus--9] Creus, A., Instrumentacin industrial, Marcom.o Boi/areu Editores, Barcelona, 19-9.
[C0C1-92] C3clo 4etrie.e.au, Catlogo de productos, 1992.
[!E55ERT-9)] !e**ert, 6., !is*ositi'os neum(ticos, Marcom.o Boi/areu Editores, Barcelona, 199).
[7ERRA#!-9,]7errando, 7., 8. Mercader, %Criterios *ara la selecci9n de un reductor de 'elocidad%,
Automtica e Instrumentacin, $,-, ** 1++-1+2, 199,.
[7ERRAT-82]7errat, 4., Robtica industrial, Marcom.o Boi/areu Editores, Barcelona, 1982.
[4#:A1E:-9$]RC 4on;ale; 3 RE. 6oods, Digital Image Processing, Addison 6esle3, 199$.
[4R<ER-89] 4roo'er, M.5, %Ro.ot 3 e=ectores =inales%, en> Robtica Industrial. ecnolog!a, Pro"
gramacin # Aplicaciones, Mc4ra?-@ill, Madrid, 1989.
[@ARM#"C-92]@armonic!ri'e, Catlogo de Productos, 1990.
[M#TA#-88]Montano, 1., Tard9s, 8.!., 3 &aABs, c., %Accionamientos directos *ara ro.ots%, Au$
tomtica e Instrumentacin, 1-9, ** $C1-$21, 1988.
[#AC@T"4A1-9+]#atchtiAal, C.1., lnstrumentation and control. %undamentals and applications, 6iD
le3- "nterscience, 199+.
[5A11Es-89] 5all(s, R, %Transductores de reactancia 'aria.le 3 electromaAnticos%, en> ransducto$
res # acondicionadores de se&al, Marcom.o, Barcelona, 1989.
[5RE#0A#&A-9)]5ren3anosa, 4., %&ensores de *osici9n 3 'elocidad%, Automtica e Instrumenta$
cin, $)), ** 22-8$,199).
[RF&&E1-9+] Russel, R.A., Robot actile 'ensing, 5rentice-@all, 199+.
[&F!R"E-9C] &udri(, A., %&er'ornotores elctricos%, Automtica e Instrumentacin, $C9, **. 82-9-,
199C
[&F!R"E-88] &udri(, A., %Control de 'elocidad de motores elctricos%, Automtica e Instrumentacin,
18$,**. 1+C-1,2, 1988.
[<CGRT@-9)]<ocHroth, R6., Industrial (#draulics, !elmar5u.lishers, #ue'a 0orH, 199).
[0FCE7-89] 0ouce=-Toumi, G., %!esiAn and Control o= !irect-!ri'e Ro.ots - a &ur'e3%, en> )e
Robotics Revie* 1 I . Ghati., 8.8. CraiA 3 1o;ano-5re;, Ed.J, ** $8,-,+$. The M"T 5ress, CamD
.ridAe, 1989.
1 1
Captulo 3
HERRAMIENTAS MATEMTICAS PARA
LALOCALIZACI6N ESPACIAL
De pequea centella se levanta gran fuego.
Refranero popular
La manipulacinde piezas llevada a cabo por un robot implica el movimientoespacial de su extremo.
Asimismo, para que el robot pueda recoger una pieza, es necesario conocer la posicin orientacin de
!sta con respecto a la base del robot. "e aprecia entonces la necesidad de contar con una serie de
#erramientas matem$ticas que permitan especificar la posicin orientacin en el espacio de piezas,
#erramientas, en general, de cualquier ob%eto.
&stas #erramientas #an de ser lo suficientemente potentes como para permitir obtener de forma
sencilla relaciones espaciales entre distintos ob%etos en especial entre !stos el manipulador. Los
siguientes epgrafes introducen de forma progresiva estas #erramientas, de especial importancia para
la adecuada comprensin de desarrollos en captulos posteriores. "in embargo, es necesario resaltar
que !stas son de aplicacin general para el tratamiento de problemas de localizacin espacial que,
por tanto, no son de aplicacin exclusiva en el campo de la robtica.
Los dos primeros apartados presentan los distintos m!todos existentes para la representacin de la
posicin orientacin espacial de un cuerpo rgido. Los conceptos se ir$n introduciendo por orden
creciente de dificultad, comenzando con 'la representacin en dos dimensiones, para seguidamente
pasar al an$lisis en tres. &n el siguiente epgrafe se introduce el concepto de matriz de transformacin
#omog!nea, necesaria para la representacin con%unta de posicin orientacin, %unto con sus
propiedades aplicaciones. "e trata de una #erramienta mu (til para representar transformaciones
espaciales, estando su uso ampliamente extendido en diversos campos adem$s del de la robtica,
como por e%emplo en el de gr$ficos por computador.
49
50 Fundamentos de robtica
Los denominados cuatemios, al tratarse de una herramienta de uso ms restringido, no son
analizados con el suficiente detalle en la bibliografa existente. Se trata de un mtodo de gran
economa computacional utilizado incluso por algunos robots comerciales para la representacin de
orientacin, y por ello se ha incluido un apartado dedicado a su estudio.
3.1. !"!S!#$%&'(# )! L% "*S'&'(#
"ara localizar un cuerpo rgido en el espacio es necesario contar con una herramienta +ue permita la
localizacin espacial de sus puntos. !n un plano el posicionamiento tiene dos grados de libertad, y por
tanto la posicin de un punto ,endr definida por dos componentes independientes. !n el caso de un
espacio tridimensional ser necesario emplear tres componentes.
La forma ms intuiti,a y utilizada de especificar la posicin de un punto son coordenadas cartesianas.
!xisten adems otros mtodos, igualmente ,lidos, y tambin ampliamente extendidos, como son las
coordenadas polares para dos dimensiones, y las cilndricas y esfricas para espacios de tres
dimensiones.
3.1.1. Sistema cartesiano de referencia
#ormalmente los sistemas de referencia se definen mediante e-es perpendiculares entre s con un origen
definido. !stos se denominan sistemas cartesianos, yen el caso de traba-ar en el plano ./ dimensiones0,
z
y
x a
..............
x
y
y
x
a0 b0
1igura 3.1. Representacin de un vector en coordenadas cartesianas en 2 y 3 dimensiones.
Herramientas matemticas 51
el sistema de referencia OXY correspondiente queda definido por dos vectores coordenados OX y OY
perpendiculares entre s con un punto de interseccin comn O. (Figura 3.1-a.
!i se tra"a#a en el espacio (tres dimensiones$ el sistema cartesiano OXY% est& compuesto por una
terna ortonormal de vectores coordenados OX$ OY y O%$ tal y como se ve en la Figura 3.1-". !e trata de
una terna ortonormal a derec'as.
3.1.2. Coordenadas cartesianas
!i se tra"a#a en un plano$ con su sistema coordenado OXY de referencia asociado$ un punto a vendr&
e(presado por las componentes (x,y) correspondientes a los e#es coordenados del sistema OXY. )ste
punto tiene asociado un vector p(x,y), que va desde el origen O del sistema OXY 'asta el punto a (ver
Figura 3.1-a. *or tanto$ la posicin del e(tremo del vector p est& caracteri+ado por las dos componentes
(x,y), denominadas coordenadas cartesianas del vector y que son las proyecciones del vector p so"re
los e#es OX y ov.
)n el caso de que se tra"a#e en tres dimensiones$ un vector viene definido con respecto al sistema de
referencia OXY% mediante las coordenadas correspondientes a cada uno de los e#es coordenados. )n el
caso de la Figura 3.1-"$ el vector p estar& definido por las componentes cartesianas (x,y,z).
3.1.3. Coordenadas polares y cilndricas
*ara un plano$ es posi"le tam"i,n caracteri+ar la locali+acin de un punto o vector p respecto a un
sistema de e#es cartesianos de referencia OXY utili+ando las denominadas coordenadas polares p(r, -
(Figura 3..-a. )n esta representacin$ r representa la distancia desde el origen O del sistema 'asta el
z
p(r,S,z)
y
p(r$!
(
z
y
a "
Figura 3.2. Representacin de a) coordenadas polares y b) cilndricas.
52 Fundamentos de robtica
z
p(r,e,<j
y
Figura 3.3. Representacin de un vector en coordenadas esfricas.
extremodel vector p, mientras que e es el ngulo que forma el vector p con el eje O.
!n el caso de tra"ajar en tres dimensiones, un vector p podr expresarse con respecto a un sistema de
referencia O#$, mediante las coordenadas cil%ndricas p(r,e,z) (Figura 3.&'"(. )as componentes r ye
tienen el mismo significado que en el caso de coordenadas polares, aplicado el razonamiento so"re el
plano O#, mientras que la componente z expresa la proyecci*n so"re el eje O$del vector p.
3.+.,. -oordenadas esf.ricas
/am"i.nes posi"le utilizar coordenadas esf.ricas para realizar la localizaci*nde un vector en un espacio
de tres dimensiones. 0tilizando el sistema de referencia O#$, el vector p tendr como coordenadas
esf.ricas (r,e,<I,donde la componente r es la distancia desde el origen O 1asta el extremo del vector p2
la componente e es el ngulo formado por la proyecci*n del vector p so"re el plano O# con el eje O2
yla componente <+3 es el ngulo formado por el vector p con el eje O$. (Figura 3.3.(
3.&. 4!54!6!7/8-9:7 ;! )8 O49!7/8-9:7
0n punto queda totalmente definido en el espacio a trav.s de los datos de su posici*n. 6in em"argo, para
el caso de un s*lido, es necesario adems definir cul es su orientaci*n con respecto a un sistema de
referencia. !n el caso de un ro"ot, no es suficiente con especificar cul de"e ser la posici*n de su
Herramientas matemticas 53
extremo, sino que en general, es tambin necesario indicar su orientacin. Por ejemplo, en el caso de un
robot que tenga que realizar sobre una pieza curva una operacin de pulido, no bastara con especificar
los puntos de la superficie para situar adecuadamente la herramienta, sino que ser necesario tambin
conocer la orientacincon que la herramienta ha de realizar la operacin.
Una orientacin en el espacio tridimensional viene definida por tres grados de libertad o tres
componentes linealmente independientes. Para poder describir de forma sencilla la orientacin de un
objeto respecto a un sistema de referencia, es habitual asignar solidariamenteal objeto un nuevo sistema,
y despus estudiar la relacin espacial existente entre los dos sistemas. e foona general, esta relacin
vendr dada por la posicin y orientacin del sistema asociado al objeto respecto al de referencia. Para
el anlisis de los distintos mtodos de representar orientaciones se supondr que ambos sistemas
coinciden en el origen, y que por tanto no existe cambio alguno de posicinentre ellos.
!."#$.%atrices de rotacin
&as matrices de rotacin son el mtodo ms extendido para la descripcin de orientaciones, debido
principalmentea la comodidad que proporciona el uso del lgebra matricial.
'upngase que se tiene en el plano dos sistemas de referencia ()* y (U+ con un mismo origen (,
siendo el sistema ()* el de referencia fijo y el sistema (U+ el mvil solidario al objeto ,-igura !../a0.
&os vectores unitarios de los ejes coordenados del sistema ()* son ix, j1 , mientras que los del sistema
(U+ son iu, 2v 3
Un vector p del plano se puede representar en ambos sistemas como4
px1 =[p x ' P1 r =p x 3 i, +p 1 . j1
puv 5 [p u 6 P v r 5 p u . 7u +P v 3 jv
8!. $9
y
v
x
a0 b)
-igura !... Or ientacin de un sistema OUV r especto a otr o OXY en un plano.
[
cosa
R=
sena
- sena]
cosa
[3.4]
54 Fundamentos de robtica
Realizandouna sencilla serie de transformaciones se puede llegar a la siguienteequivalencia:
[3.2]
donde:
[3.3]
es la llamada matriz de rotacin, que define la orientacin del sistema O! con respecto al sistema
O"#, $ que sirve para transformar las coordenadas de un vector en un sistema a las del otro. %am&i'n
reci&e el nom&re de matriz de cosenos directores. (s f)cil de compro&ar que se trata de una matriz
ortonormal,tal que R1 * RT
(n el caso de dos dimensiones, la orientacin viene definida por un +nico par)metro independiente.
,i se considera la posicin relativa del sistema O! girado un )ngulo I X so&re el O"# -.igura 3.4-&/,
tras realizar los correspondientesproductos escalares, la matriz R ser) de la forma:
0ara el caso en que I X * O, en el que los e1es coordenados de am&os sistemas coinciden, la matriz R
corresponder)a la matriz unitaria.
(n un espacio tridimensional, el razonamiento a seguir es similar. ,upnganse los sistemas O"#2 $
O!3, coincidentes en el origen, siendo el O"#2 el sistema de referenciafi1o, y el O!3el solidario
al o&1eto cu$a orientacin se desea definir. -.igura 3.4-a/. 5os vectores unitarios del sistema O"#2
ser)n i6, 1$, 78 mientras que los del O!3 ser)n iu, 1v, 79.n vector pdel espacio podr) ser referido a
cualquierade los sistemas de la siguiente manera:
Puvw=[Pu' e..P w ] T =Pu' i,: r; ;, : P w ' k ,
06$9 =[p", P y, p;% =o;<, +P y' ;, +P z ' 7,
[3.4]
y al igual que en dos dimensiones, se puede o&tener la siguienteequivalencia:
[3.=]
Herramientas matemticas 55
donde:
R= f
, ,
, J,
~.kw]
jy I, j)y
Jykw
[3.7]
k.I, kzjy kzkw
es la matriz de rotacin que def ine la orientai!n del siste"a #$%& on res'eto al siste"a #()*.
Al i+ual que en dos di"ensiones, ta",i-n rei,e el no",re de "atriz de osenos diretores y se trata de
un "atriz ortonor"al,tal que la in.ersa de la "atriz Res i+ual a su tras'uesta: R1 = RT
/a 'rini'al utilidad de esta "atriz de rotai!n orres'onde a la re'resentai!n de la orientai!n de
siste"as +irados 0nia"ente so,re uno de los ejes 'rini'ales del siste"a de ref erenia.
1n la 2i+ura 3.34,, la orientai!n del siste"a #$%&, on el eje #$ oinidente on el eje #(,
.endr5 re'resentada"ediante la "atriz:
R(x,a) =f ~
o
4 s~na.]
osa.
[3. 6] osa.
sena.
1n la 2i+ura 3.74a, la orientai!n del siste"a #$%&, on el eje #% oinidente on el eje #),
z z
w
v
y
a) ,)
Figura 3.5. Sistemade ref erencia !"# y so lidario al o $%eto &'(.
56 Fundamentos de robtica
vendr representada mediante la matriz:
l
cose
R ( y , < j = O
-sen< j >
En la Figra !"#-$, la orientaci%n del sistema O &'(, con el ej e O ( coincidente con el ej e O ),
vendr representada mediante la matriz:
C O S S
R ( z, *+ =lse,s
-!" ./0
z z
v
y
1
a+ b)
Figra !"#" Rotacin del sistema OUVW con respecto a l os ejes OY y OZ.
Estas tres matrices, ecaciones -!"20, -!"30 y -!"./0, se denominan matrices $sicas de rotaci%n de
n sistema espacial de tres dimensiones"
4omposici%n de rotaciones
5as matrices de rotaci%n peden componerse para e1presar la aplicaci%n contina de varias rotaciones"
6s7, si al sistema O &'( se le aplica na rotaci%n de nglo IX so$re O 8, segida de na rotaci%n de
nglo < ! so$re O 9 y de na rotaci%n de nglo e so$re O ), la rotaci%n glo$al pede e1presarse como:
-!"30
Herramientas matemticas 57
T ~R(z,6)R(y,~)R(x,a) J~: ~6 ~] I~$ ~ So$]r ~ ;a -~J~
loo 1 l- S$ O C$ lo Sa Ca J
f
cec$ - seco +ceses ses+cesec ]
= seC$ ceCa +seS$Sa - ceSa +seS$Ca
-S$ C$Sa C$Ca
[3. 11]
donde ce expresa cose y se expresa sen,
Es ipor!an!e considerar el orden en "#e se reali$an las ro!aciones, p#es el prod#c!o de a!rices no
es con#!a!i%o. &s', si la ro!aci(n se )iciera priero #n *n+#lo , so-re O., se+#ida de #na ro!aci(n de
*n+#lo /10so-re O1, para 2inali$ar con o!ra ro!aci(n de *n+#lo a so-re O3, la ro!aci(n +lo-al %endr'a
expresada por:
T ~ R(x, a) R(y,IjI)R(z,6) ~ f ~
O
]f q
SIjI] f C6
- S 6 0 ]
Ca -Sa O lOSe ce O =
Sa Ca -S$ O C$ O O 1
[3. 14]
f C~6
-C$Se
S~ l
= SaS$Ce +Case - SaS$Se+Cace -SaC$
- CaS$Ce +Sase CaS$Se+Sace CaC$
"#e coo se aprecia di2iere en +ran edida de la an!erior. 5n es!#dio *s de!allado so-re la
coposici(n de ro!aciones, a#n"#e aplicado al caso *s +eneral de a!rices de !rans2oraci(n
)oo+6nea, se p#ede encon!rar en el ep'+ra2e 3.3.7.
3.2.2. 8n+#los de Euler
9ara la represen!aci(n de orien!aci(n en #n espacio !ridiensional edian!e #n a!ri$ de ro!aci(n es
necesario de2inir n#e%e eleen!os. &#n"#e la #!ili$aci(n de las a!rices de ro!aci(n presen!e :l!iples
%en!a;as, coo se %er* en el si+#ien!e ep'+ra2e, exis!en o!ros 6!odos de de2inici(n de orien!aci(n "#e
)acen :nicaen!e #so de !res coponen!es para s# descripci(n. Es!e es el caso de los llaados *n+#los
de E#ler.
<odo sis!ea O5=> solidario al c#erpo c#ya orien!aci(n se "#iere descri-ir, p#ede de2inirse con
respec!o al sis!ea O31. edian!e !res *n+#los: /10,,,$, denoinados *n+#los de E#ler. ?irando
s#cesi%aen!e el sis!ea O31. so-re #nos e;es de!erinados de #n !riedro or!onorallos %alores de
/10,,,$,se o-!endr* el sis!ea O5=>. Es necesario, por !an!o, conocer ade*s de los %alores de los
58 Fundamentos de robtica
ngulos, cules son los ejes sobre los que se realizan los giros. Existen diversas posibilidades' (24
formalmente definidas), siendo las tres ms usuales las que se muestran a continuacin!
" ##'
YV
$% &'$'
(igura ).*. ngulos deEuler "%".
+ngulos de Euler ZXZ
Es una de las representaciones ms ,abituales entre las que realizan los giros sobre ejes previamente
girados. -e le suele asociar con los movimientos bsicos de un girscopo. -i se parte de los sistemas
.%/" y .&0#, inicialmente coincidentes, se puede colocar al sistema .&0# en cualquier
orientacin siguiendo los siguientes pasos. ((igura ).*.)
1. 2irar el sistema .&0# un ngulo 3 t4 con respecto al eje .", convirti5ndose as6 en el .&'0'#'.
2. 2irar el sistema .&'0'#' un ngulo 7 con respecto al eje .&', convirti5ndose as6 en el
.&'0'#'.
). 2irar el sistema .&'0'#' un ngulo lJ I con respecto al eje .#' convirti5ndose finalmente en
el .&'''0'''#'''.
Es importante que estas operaciones se realicen en la secuencia especificada, pues las operaciones de
giros consecutivos sobre ejes no son conmutativas.
+ngulos de Euler ZYZ
Es otra de las representaciones ms ,abituales entre las que realizan los giros sobre ejes previamente
girados. -lo se diferencia del anterior en la eleccin del eje sobre el que se realiza el segundo giro. -i se
Herramientas matemticas 59
z WW'
U"
Figura 3.8. ngulos de Euler ZYZ.
parte de los sistemas OXYZ y OUVW, inicialmente coincidentes, se puede colocar al sistema OUVW en
cualquier orientacin siguiendo los siguientes pasos. !Figura 3.8."
#. $irar el sistema OUVW un %ngulo c p con respecto al e&e OZ, con'irti(ndose as) en el OU'V'W'.
*. $irar el sistema OU'V'W' un %ngulo 8 con respecto al e&e OV', con'irti(ndose as) en el sistema
OU"V"W".
3. $irar el sistema OU"V"W" un %ngulo W con respecto al e&e OW", con'irti(ndose +inalmente
en el OU"'V"'W"'.
,omo antes, es preciso considerar que el orden de los giros no es conmutati'o.
-oll, pitc. and /a0 !ala1eo, ca1eceo / gui2ada"
3e trata de la representacin utilizada generalmente en aeron%utica. 4s tam1i(n la m%s .a1itual de entre
las que se aplican a los giros so1re los e&es del sistema +i&o. 3i se parte de los sistemas OXYZ y OUVW,
al igual que en el caso anterior, se puede colocar al sistema OUVW en cualquier orientacin siguiendo
los siguientes pasos. !Figura 3.5."
1. $irar el sistema OUVW un %ngulo W con respecto al e&e OX. 4s el denominado Ya0 o gui2a6
da.
*. $irar el sistema OUVW un %ngulo 8 con respecto al e&e OY. 4s el denominado 7itc. o ca1e6
ceo.
3. $irar el sistema OUVW un %ngulo c p con respecto al e&e OZ. 4s el denominado -oll o ala1eo.
v
60 Fundamentos de robtica
z w
Pitch
y
Xv
Figura 3.9. ngulos de Euler: ro11 , pitch yyaw.
Al igual que en los casos anteriores, yen general siempre que se concatenan varios giros seguidos, es
necesario considerar que no se trata de una transformacin conmutativa, debindose seguir una
secuencia determinada de aplicacin de los mismos.
z
v
w
b)
Figura 3.10. Representacin de orientacin por eje yngulo de giro (par de rotacin).
Herramientas matemticas 61
3.2.3. Par de rotacin
La representacin de la orientacin de un sistema OUVW con respecto al sistema de referencia OXYZ
tambinpuede realizarse mediante la definicin de un vector k (k",ky.kz) y un nulo de iro e , tal !ue el
sistema OUVW corresponde al sistema OXYZ irado un nulo e sobre el e"e k #$iura %&'()& *l e"e k
+a de pasar por el orien O de ambos sistemas& ,l par #k- e ) se le denomina par de rotacin y se puede
demostrar !ue es .nico&
,l iual !ue los nulos de *uler- no se trata de un mtodo !ue permita realizar una visualizacin
sencilla de la orientacin- salvo en casos muy concretos en los !ue el vector k coincida con alunos de
los e"es coordenados del sistema OXYZ& La utilidad de este sistema se ver en ep/rafes posteriores&
0ara la definicin de orientacin con este mtodo- es necesario definir cuatro parmetros distintos1
k",ky.kz y e . 2e puede representar como 3ottk&O)&
La aplicacin de un par de rotacin !ue rote un vector p un nulo e alrededor del e"e k se realiza a
travs de la siuiente e4presin1
3ottk&O) p =pcos 56 #k 4p) senfl +k(k &p)#'6 cose) 7%& '%8
3.2.4. Cuaternios
Los cuatemios- definidos por 9amilton [HAMILTON-69], pueden ser utilizados como +erramienta
matemticade ran versatilidad computacional para traba"ar con iros y orientaciones& *n la biblioraf/a
clsica sobre robtica suelen ser obviados o no tratados con el suficiente detalle- a pesar de ser
empleados por alunos robots comerciales #,::)& 0ara comprender la verdadera utilidad de los
cuatemios- es necesario analizar sus propiedades y ver la aplicacin prctica de las mismas& *sto se
realizar en un ep/rafe posterior- e4ponindose a!u/ .nicamente su definicin
Un cuaternio Q est constituido por cuatro componentes (Qo,q,q2>q3) !ue representan las coordenadas
del cuaternio en una base {e,ij,k}. *s frecuente denominar parte escalar del cuaternio a la componente
en e1 qo, y parte vectorial al resto de componentes& ;e modo !ue un cuaternio se puede representar como1
7%& '<8
donde s representa la parte escalar- y v la parte vectorial&
0ara la utilizacin de los cuaternios como metodolo/a de representacinde orientaciones se asocia el
iro de un nulo e sobre el vector k al cuaternio definido por1
& #e e)
= =Rot(k,e) = cos"2,k sen " 2 7%& '>8
;e esta asociacin arbitraria y racias a las propiedades de los cuaternios !ue ms adelante se vern-
se obtiene una importante +erramienta anal/tica para el tratamientode iros y cambios de orientacin&
62 Fundamentos de robtica
3.3. MATRICES DE TRANSFORMACIN HOMOGNEA
En los epgrafes anteriores se an est!"ia"o "istintos #$to"os "e representar la posi%i&n o la orienta%i&n
"e !n s&li"o en el espa%io. 'ero ning!no "e estos #$to"os por s solo per#ite !na representa%i&n
%on(!nta "e la posi%i&n y "e la orienta%i&n )lo%ali*a%i&n+. 'ara sol,entar este pro-le#a se intro"!(eron
las "eno#ina"as %oor"ena"as o#og$neas.
3.3... Coor"ena"as / #atri%es o#og$neas
0a representa%i&n #e"iante %oor"ena"as o#og$neas "e la lo%ali*a%i&n "e s&li"os en !n espa%io n1
"i#ensional se reali*a a tra,$s "e %oor"ena"as "e !n espa%io )n2 .+3"i#ensional. Es "e%ir4 !n espa%io n
"i#ensional se en%!entra representa"o en %oor"ena"as o#og$neas por )n2 .+ "i#ensiones4 "e tal for#a
5!e !n ,e%tor p(x,y,z) ,en"r6 representa"o por p(wx,wy,wz,w), "on"e 7 tiene !n ,alor ar-itrario y
representa !n fa%tor "e es%ala. De for#a general4 !n ,e%tor p 8 ai 2 bj 2 %94 "on"e i4 j Y 9 son los
,e%tores !nitarios "e los e(es O:4 O; / O< "el siste#a "e referen%ia O:;<4 se representa en
%oor"ena"as o#og$neas #e"iante el ,e%tor %ol!#na=
x
y
P= =
*
7 w 1
aw a
>3. .?@
bw b
cw e
'or e(e#plo4 el ,e%tor Ai 2 3( 2 B9 se p!e"e representar en %oor"ena"as o#og$neas %o#o >A434B4I@T4
o %o#o >B4?4C4A@T o ta#-i$n %o#o >3?43D43.A433f4 et%. 0os ,e%tores n!lo se representan %o#o >O4O4O4n@T4
"on"e n es no3n!lo. 0os ,e%tores "e la for#a >a4-4%4O@T sir,en para representar "ire%%iones4 p!es
representan ,e%tores "e longit!" infinita.
A partir "e la "efini%i&n "e las %oor"ena"as o#og$neas s!rge in#e"iata#ente el %on%epto "e #atri*
"e transfor#a%i&n o#og$nea. Se "efine %o#o #atri* "e transfor#a%i&n o#og$nea T a !na #atri*
"e "i#ensi&n B E B 5!e representa la transfor#a%i&n "e !n ,e%tor "e %oor"ena"as o#og$neas "e !n
siste#a "e %oor"ena"as a otro.
>
R3:3
T=
fIE3
'I@ 8 >Rota%i&n TraSlaCi&n@
F
'erspe%ti,a Es%ala"o
IEl
>3. .G@
Herramientas matemticas 63
Se puede considerar que una matriz homognea se haya compuesta por cuatro submatrices de distinto
tamao: una submatriz R3x3 que corresponde a una matriz de rotacin; una submatriz P3xl que
corresponde al vector de traslacin; una submatriz flx3 que representa una transormacin de perspectiva!
y una submatriz "lxl que representa un escalado global# $n robtica generalmente slo interesar%
conocer el valor de R3x3 &de P3xh consider%ndose las componentes de flx3 nulas y la de "lxl la unidad!
aunque m%s adelante se estudia su utilidad en otros campos# 'l tratarse de una matriz ( x (! los vectores
sobre los que se aplique deber%n contar con ( dimensiones! que ser%n las coordenadas homogneas del
vector tridimensional de que se trate#
3.3.2. Aplicacin de las matrices homogneas
Si como se ha mencionado! se considera la transormacin de perspectiva nula y el escalado global
unitario! la matriz homognea ) resultar% ser de la siguiente orma:
*
R3+3
T=
O
*3# ,-.
que representa la orientacin y posicin de un sistema /012" rotado y trasladado con respecto al
sistema de reerencia /+&3# $sta matriz sirve para conocer las coordenadas (rx,ry,rz) del vector r en el
sistema /+&3 a partir de sus coordenadas (ru,ry,l"w) en el sistema 8lXY-z;:
o 'L( ,4vJ
r x ru
ry ry
=T
r z rw
1 1
*3# ,5.
)ambin se puede utilizar para expresar la rotacin y traslacin de un vector respecto de un sistema
de reerencia i6o /+&3! de tal manera que un vector rxyz rotado seg7n R3x3 &trasladado seg7n P3xl se
convierte en el vector r0xyz dado por:
r', rx
r'
ry
y
=T *3# 89.
r'z rz
, ,
$n resumen! una matriz de transormacin homognea se puede aplicar para:
, I
64 Fundamentos de robtica
l. Representar la posicin y orientacin de un sistema girado y trasladado O'UVW con respecto a
un sistema fijo de referencia OXYZ, que es lo mismo que representar una rotacin y traslacin
realiada so!re un sistema de referencia.
". #ransformar un $ector e%presado en coordenadas con respecto a un sistema O'UVW, a su e%&
presin en coordenadas del sistema de referencia OXYZ.
'. Rotar y trasladar un $ector con respecto a un sistema de referencia fijo OXYZ.
(e )ace notar que se utilian coordenadas )omog*neas con factor de escalado la unidad, y que por
tanto los $ectores que inter$ienen en las transformaciones )an de poseer cuatro componentes. +or
comodidad, se elige el factor de escalado w , l.
- continuacin se $a a analiar con detalle el empleo de las matrices )omog*neas como )erramienta
para representar la localiacin de o!jetos en el espacio tridimensional, as. como para realiar
proyecciones y escalados.
Traslacin
(upngase que el sistema O'UVW /nicamente se encuentra trasladado un $ector p , +%i +pyj +p0 con
respecto al sistema OXYZ. 1a matri # entonces corresponder2 a una matri )omog*nea de traslacin3
T(p) =
o O O 4
4 O O p;
5'. "46
O
4 O e,
O O 4 ,
que es la denominada matri !2sica de traslacin.
Un $ector cualquiera r, representado en el sistema O'UVW por ru$7, tendr2 como componentes del
$ector con respecto al sistema8OX'r'Z3
r x 4 O O
P x
r u r u +v,
r y O 4 O
P y
r v r , +P y
O O
5'.""6
r z
P z
r w r; +P ;
4 O O O 4 4 1
, 1 ~
Herramientas matemticas 65
ya su vez, un vector rx,y,z desplazado segn T tendr como componentes r' x,y,z :
r', 1 O O
Px
r x r,+e,
r '
O 1 O
Py
r y
r y +, y
[3. 23]
r', O O 1
Pz
r z
r,+e;
1 O O O 1 1 1
Segn la !gura 3, 1 1 el s!stema O "#$% est trasladado un vector p&',(3,)* con respecto del s!ste+
ma O ,-.. /alcular las coordenadas tr., ry,rz) del vector r cuyas coordenadas con respecto al s!s+
tema O "#$% son ruv0&(2,1,3*,
Ejemplo 3.1.
z
u
: 1 1
y
. ,
.......... :.... 2
2
i
Figura 3.11. Figura del Ejemplo 3.1 .
li
' 1
1 ,
t!
i
3pl!cando la ecuac!4n [3.22] se o5t!ene:
I
r x
O O 6 -2 2
16
O 1 O -3 1 2
:1
r y
I
rz
O O ) 3 11 I
1
I
O O O 1 1 1
I
1 :
I 11
66 Fundamentos de robtica
Ejemplo 3.2.
Calcular el vector r' xyz resultante de trasladar al vector r xyz( 4,4,11) segn la transormac!"n #(p)
con p($,%3,&) (ver '!gura 3.12).
z
x
y
1( )
: 1 1
1*.).)
: .:' 4
.......... ).
4
'!gura 3.12. Figura del Ejemplo 3.2.
+pl!cando la ecuac!"n ,3.23- se o.t!ene)
r'x
1 / / $ 4 1*
r' / 1 / -3 4 1
y
r',
/ / 1 & 11 1(
1
/ / / 1 1
0otac!"n
1up"ngase a2ora 3ue el s!stema / '456 s"lo se encuentra rotado con respecto al s!stema / 758. 9a
su.matr!z de rotac!"n 03x3 ser: la 3ue de!na la rotac!"n, yse corresponde al t!po matr!z de rotac!"n
presentada en el ep;grae 3.2.1. <e !gual orma 3ue se 2ac;a all;, se pueden de!n!r tres matr!ces
2omog=neas.:s!cas de rotac!"n segn se real!ce =sta segn cada uno de los tres ejes coordenados / 7,
/ 5y/ 8 del s!stemade reerenc!a / 758)
Herramientas matemticas. 67
1 O O O
T(x,a) =
O cosa -senn O
[3. 24]
O sena cosa O
O O O 1
T ( y , < I =
- sen < 1 >
O
cos< l>
O
O sen O
1 00
O cos< l> O
O O 1
[3. 25]
cose -sene O O
T(z,e) =
sen O cose O O
O O 1 O
[3.26]
O o o 1
Un vecto c!al"!#ea r, e$esenta%o en el s#ste&a '#a%o O (U)* $o !v+ , ten%, co&o co&$onentes
(rx, ry, rz) en el s#ste&a O -./ las s#'!#entes0
r x !
, 1
;i
r y v
=T [3.21]
r z r w
1 1
.a s! vez !n vecto x,2.z ota%o se'3n T ven%, ex$esa%o $o (x,2.z se'3n0
r', r x
r' r
y
=T
y
[3. 24]
,
r z rz
1 1
68 Fundamentos de robtica
Ejemplo 3.3.
Segn la Figura 3.13, el sistema OUVW se encuentra girado -900 alrededor del eje OZ con res
ecto al sistema O!"Z. #alcular las coordenadas del $ector r%&' si ru$( ) *+,,,1-./.
'
Figura 3.13. Figura del Ejemplo 3.3.
0licando la ecuaci1n *3.-2. y la matri' de la e%resi1n *3.-3. se tendr45
r x O 1 O O + ,
r y
-1 O O O , -+
rz O O 1 O 1- 1-
1 O O O 1 1 1
Traslacin junto con rotacin
6a rincial $entaja de las matrices 7omog8neas reside en su caacidad de reresentaci1n conjunta de
osici1n y orientaci1n. 9sta reresentaci1n se reali'a utili'ando al mismo tiemo la matri' de rotaci1n
:3%3 y el $ector de traslaci1n ;3%l en una misma matri' de trans<ormaci1n 7omog8nea. 9s or tanto la
alicaci1nconjunta de lo $isto en los dos aartados anteriores.
z
Herramientas matemticas 69
I ' I r " l
':' .
,
I
; ;
' 1
!
W"
U"
v
y
Figura 3.14. Distintos sistemas final es segn el or den de l as tr ansfor maciones.
La traslacin y la rotacin son transformaciones que se realizan en relacin a un sistema de
referencia. Por lo tanto, si se quiere exresar la osicin y orientacin de un sistema !'U"W,
ori#inalmente coincidente con el de referencia y que $a sido rotado y trasladado se#%n &ste, $a'r( que
tener en cuenta si rimero se $a realizado la rotacin y desu&s la traslacin o viceversa, ues se trata de
transformacionesesaciales no conmutativas. )n la *i#ura +.,- se demuestra esta no conmutatividad de
forma #r(fica. .e arte de un sistema !U"W coincidente con !/01 al que se va a alicar una
traslacin se#%n un vector Px,y,zy una rotacin de ,233 alrededor del e4e !1, .i rimero se rota y
desu&s se traslada se o'tiene un sistema final !'U'"'W'. )n cam'io, si rimero se traslada y desu&s se
rota se o'tiene otro sistema final !"U"""W", que reresenta una localizacin totalmente distinta a la del
sistema final anterior. .e tendr(, or tanto, matrices $omo#&neas distintas se#%n se realice una traslacin
se#uidade rotacin o una rotacin se#uida de traslacin.
Rotacin seguida de traslacin
Para el caso de realizar rimero una rotacin so're uno de los e4es coordenados del sistema !/01
se#uida de una traslacin, las matrices $omo#&neas ser(n las que a continuacinse exresan:
5otacinde un (n#ulo a so're el e4e !/ se#uido de un traslacin de vector Px,y,z:
1
677x,a8,8 9 :
!
O
cosa
sena
O
O
;+. <=>
? sena
cosa
O
70 Fundamentos de robtica
Rotacin de un ngulo < 1 > sobre el eje OY seguido de una traslacin de vector Px,y.z:
!. !"#
cos< j>
O
$sen< j>
O
O seno
O
O cos< j>
O O
Rotacin de un ngulo % sobre el eje O& seguido de una traslacin de vector Px,y.z:
cos' $sen' O
Px
())z,s*,+* ,
sen' cos' O
Py
!. !1 #
O O 1
Pz
O O O 1
Traslacin seguida de rotacin
Para el caso de realizar +ri-ero una traslacin seguida de una rotacin sobre los ejes coordenados del
siste-a O.Y&, las -atrices /o-og0neas resultantes son las siguientes:
(raslacin de vector Px.y.z seguida de rotacin de un ngulo ex sobre el eje O..
1 O O
Px
()+,)x,a** =
O cosa $sena pycosa - pzsena
!. !1#
O sena cosa pysena +pzcosa
O O O 1
(raslacin de vector Px.y.z seguida de rotacin de un ngulo < 1 > sobre el eje OY.
cos< j> O
sen0
P, coso +Pz seno
()+,)y,< j2* =
O 1 O
Py
$sen< j> O cos< j> Pz coso $ P; seno
!. !!#
O O O 1
Herramientas matemticas 71
Traslacin de vector Px.y.z seguida de rotacin de un ngulo Elsobre el eje OZ.
cose -sene o P x cose -' P y sen
T(!(z!e"" =
sen
cose o px sen#l +P! cose
$%.%&'
o o 1
P z
o o o 1
Ejemplo 3.4.
(n siste)a O(*+ ,a sido girado -./ alrededor del eje O0 y osterior)ente trasladado un vector
(1!-&!23" con resecto al siste)a O04Z (5igura %.26". 7alcular las coordenadas (rx ,ry ,rz) del
vector r con coordenadas ruv8 (-%!&!-22".
z
+9
y
*9
: 2
. .
: .: ' 6
.......... : .
Figura 3.15. Sistemas de referencia del Ejemplo 3.4.
(tilizando la )atriz de la exresin $%.3-' se tendr:
r x
2 O O 1 -3 6
r y O O -2 -4 4 ;
r z O 2 O 23 -11 2<
2 O O O 2 1 2
72 Fundamentos de robtica
Ejemplo 3.5.
Un sistema OUVW ha sido trasladado un vector p(8,-4,1! con respecto al sistema O"#$ y %irado
&'( alrededor del eje O" ()i%ura 3.1*!. +alcular las coordenadas (rx, ry, rz) del vector r de coor,
denadas ruv-(-3,4,-1l!.
W. /
o
y
U0
)i%ura 3.1*. Situacin de los sistemas de ref-erenciadel Ejemplo 3.5.
Utili/ando la matri/ de la e1presi2n 33.34 se o5tiene6
r x
1 O O 8 -3 5
r y O O -1 -1 4 -1
rz O 1 O -4 -11 O
1 O O O 1 1 1
7erspectiva y escalado
8as matrices homo%9neas tam5i9n se pueden aplicar para la reali/aci2n de un escalado de las
componentesde un vector. :astar; utili/ar una matri/ < del tipo6
1 O O O
O 1 O O
T = O O 1 O
O O O s
[3. 36]
Herramientas matemticas 73
a O O O
O b O O
T =
O O O
[3. 35]
e
O O O 1
Cualquier vector r(x,y,z) puede ser transformado en el vector r(ax,by,cz). T ambin se puede realizar
un escalado lobal de las tres componentes mediante la matriz!
a travs de la cual" utilizando la definici#n de coordenadas $omoneas" cualquier vector r(x,y,z) puede
ser transformadoen un vector rix/s.y/s.z/s).
%na aplicaci#n m&s de las matrices $omoneas es la transformaci#n de perspectiva. 'up#nase una
lente situada sobre el plano O () con distancia focal f situada sobre el e*e O + ,-iura 3.1 ./. 'e puede
comprobar que el punto r(x,y,z) se ve en el plano de la lente como un punto r'(x',y',z') cu0as coordenadas
vienen dadas por la siuientee1presi#n!
x'
x
,
z'
Z
222
y =0
222
1-1. 1-1.
f f
[3.3.]
3sta transformaci#n" denominada de perspectiva" puede realizarse a travs de una matriz $omonea
del tipo [-u244]!
x' 1 O O O x
y' O 1 O O y
z' O O 1 O
z
1 O -:11f O 1 1
[3. 34]
5ara las aplicaciones en rob#tica de las matrices $omoneas" se supone que no e1iste ninuna
transformaci#nde perspectiva 0 que el escalado es siempreunitario.
74 Fundamentos de robtica
z
Foco de la lente
Figura 3.17. Transformacin de perspectiva.
3.3.3. Significado geomtrico de las matrices homogneas
Como ya se ha descrito, una matriz homognea sirve para transformar un vector expresado en
coordenadas homogneas con respecto a un sistema O'UVW, a su expresin en las coordenadas del
sistema de referencia O!"# $am%in se puede utilizar para rotar y girar un vector referido a un sistema
de referencia fi&o, y en definitiva sirve para expresar la orientacin y posicin de un sistema de
referencia O'UVW con respecto a otro fi&o O!"#
'a matriz $ de transformacin se suele escri%ir de la siguiente forma(
nx Ox ax
Px
T=
ny ay ay
Py
) * (
nz Oz az
+ z
O O O 1
* ,# ,-.
donde n,o,a es una terna ortonormal /ue representa la orientacin y p es un vector /ue representa la
posicin#
1
Herramientas matemticas 75
Si se considera un vector ruvw = [0,0,0,1]T, es decir, el origen del sistema O'UVW, la aplicacin de la
matri T !ue representa la trans"ormacin #traslacin + rotacin$ de O'UVW con respecto a O%&', se
o(tiene r xyz:
o .
[)* +0]
o
o
1 1
,
rx nx Ox ax
Px
1
nx
, .
. ,
r
ny Oy ay Py
O ny
i
y
[)*+1]
I I
rz nz Oz az
,
O nz
l i
1 1
1
1 O O O 1
- 11
! i :
H
!ue coincide con el vector columna p de T* ,or tanto, este vector columna representa la posicin del
origen de O'UVW con respecto del sistema O%&'*
Si, de igual manera, se considera el vector de coordenadas .omog/neas [1,0,0,1]T con respecto del
sistema OUVW, es decir, el vector director del e0e coordenado O'U del sistema O'UVW, y suponiendo el
vector p de traslacin nulo, se tendr1-
11
11*1
11*1
2s decir, el vector columna n representa las coordenadas del e0e O'U del sistema O'UVW con
respecto del sistema O%&'* 3e igual "orma, si se realia la trans"ormacin de los vectores [0,1,0,1]T y
[0,0,1,1]T re"eridos al sistema O'UVW, se o(tiene !ue el vector columna representa las coordenadas
del e0e dV del sistema O'UVW con respecto del sistema O%&', y !ue el vector columna a representa
las coordenadas del e0e O'W del sistema O'UVW con respecto del sistema O%&'*
4onsecuentemente, los vectores n, y a de"inen una tema ortonormal a derec.as, lo !ue signi"ica
!ue-
11011 = 11011 = I l a l l= 1
[)*+5]
o xo = a
4omo ya se vio cuando se e6plic la matri de rotacin, la su(matri de rotacin [n,o,a] corresponde
a una matri ortonormal, !ue cumple !ue-
[o o ar = [o o a"
[)* +)]
76 Fundamentos de robtica
La matriz inversa de la matriz homognea de transformacin T es fcilmente obtenible, y
corresponde a la siguiente expresin:
T
nx ny nz -n p
T-1 =
OX Oy Oz
_Tp
_aTp
!"_##$
ax ay az
1
%i se tiene la relacin r x&z ' T r uv( )se multiplica en ambos miembros por r1 , se tiene:
T
-1
rx&z =ruv(
!"*#+$
por lo ,ue, realizando el mismo proceso ,ue se hizo anteriormente, se deduce ,ue los vectores fila de la
submatriz de rotacin de la matriz T -vectores columna de la submatriz de rotacin de rl),representan
los e.es principales del sistema de coordenadas de referencia /)0 con respecto a 123* 4s decir, los
vectores fila de la matriz !n o a$ representan otra tema ortonormal a derechas*
3.3.4. Composicin de matrices homogneas
5nteriormente se ha mencionado ,ue una matriz de transformacin homognea sirve, entre otras cosas,
para representar el giro y la traslacin realizados sobre un sistema de referencia* 4sta utilidad de las
matrices homogneas cobra a6n ms importancia cuando se componen las matrices homogneas para
describir diversos giros y traslaciones consecutivos sobre un sistema de referencia determinado*
7e esta forma, una transformacin comple.a podr descomponerse en la aplicacin consecutiva de
transformaciones simples -giros bsicos y traslaciones8*
9or e.emplo, una matriz ,ue representa un giro de un ngulo exsobre el e.e /, seguido de un giro de
ngulo : p sobre el e.e ) y -de un giro de un ngulo e sobre el e.e 0, puede obtenerse por la
composicin de las matrices bsicas de rotacin:
ce -ss o o
; 1 <
o S<j> o 1 o o o
se ce o o o 1 o o o Ca -Sa
T ' T(z,e )T(y,<jT(x, a) '
1 -S<j> C<j> Sa Ca
e
1 1 1
!"*#=$
c<j>ce - Se Ca + ce s<j>Sa ses> +cesec>
r
sece ceco rseses> - ce Sa +se s<j>Ca
'
-S<j> C<j>Sa CaC<j>
1
T =T(z,90") T(p) T(x,-90") =[~
-1 O
O O
O 1
O O
I
,
i
i
i ~
1 ,
!
Herramientas matemticas 77
Debido a que el producto de matrices no es conmutativo, tampoco lo es la composicin de
transformaciones. Si se invierte el orden de aplicacin de las transformaciones, el resultado es,
lgicamente,distinto:
1 O O O C<l O S<l O ce -se O O
O Ca -Sa O O 1 O O se ce O O
! " !#$, a% &'&#(.% !#), e% "
O Sa Ca O -S<l O C<l O O O O
O O O 1 O O O 1 O O O 1
*+.,7-
c<lce " ceso S<l O
SaS<lCe+ caSe - SaS<lSe+Cace -SaC<l O
- CaS<lCe+Sase ceseso +soca CaC<l O
O O O 1
.emplo +./.
Se quiere obtener la matri) de transformacin que representa al sistema O&012 obtenido a partir
del sistema O345 mediante un giro de 6ngulo -788 alrededor del ee O3, de una traslacin de
vector 9$()#:,:,lO% y un giro de 788 sobre el ee O5.
9ara ello bastar6 multiplicar en el orden adecuado las diferentes matrices b6sicas:
.n los eemplos vistos anteriormente los ees sobre los que se reali)aban las operaciones
:orrespond;an al sistema fio de referencia. O345. !ambi<n es posible componer matrices de
ransformacin de manera que las operaciones est<n referidas en todo momento al sistema que est<
novi<ndose. 9ara ello bastar6 unicamente con ir concatenando matrices en orden inverso. 9or eemplo,
=nla siguienteecuacin :
, i
78 Fundamentos de robtica
1 O O O C<j> O S<j> O ce -se O O
O Ca -Sa O O 1 O O se ce O O
. T = T(x,a) T(v,<j T(w.B) =
=
O Sa Ca O -S<j> O C<j> O O O 1 O
O O O 1 O O O 1 O O O 1
[3.48]
c<j>ce -cese S<j> O
SaS<j>ce +Case - SaS<j>se +Cace -SaC<j> O
=
- ceCaS<j> +Sase CaS<j>se +Sace CaC<j> O
O O O 1
se muestra una matriz que representa un giro de ngulo (X sobre el ee O X del sistema !io O X"#$
seguido de un giro de %alor cp sobre el ee O & y un giro de ngulo 8 sobre el ee O ' del sistema en
mo%imiento O (&'. )omparar con la matriz de la ecuaci*n [3.4+]$ que representa las mismas
trans!ormacionesre!eridas a los ees de un sistema O X"# !io de re!erencia.
Ejemplo 3.7.
O btener la matriz de trans!ormaci*n que representa las siguientes trans!ormaciones sobre un siste,
na O X"# !io de re!erencia- traslaci*n de un %ector ./0z( -3$11$1123 giro de -411 sobre el ee O 5(
del sistema trasladado y giro de 411 sobre el ee O 5& del sistema girado.
6e escogen las matrices bsicas correspondientes y se componen en orden in%erso al eemplo
anterior.
T = T(p ) T(u,-90") T(v ,90) = [7
O O
1 O
O
O O
~ ; 1 r7 7 O ~ 1 ~ ~ ~ ~ ! "r7 1 7 O ~ ; 1
11 O -1 O O -1 O O O O -1 O 11
1111111111 111
8e !orma general$ a la 9ora de componer di%ersas trans!ormaciones mediante matrices 9omog:neas$
se 9an de tener en cuenta los siguientes criterios-
1. 6i el sistema !io O X"# y el sistema trans!ormado O 5(&' son coincidentes$ la matriz 9omo,
g:nea de trans!ormaci*n ser la matriz 4 / 4 identidad$ 14.
;. 6i el sistema O 5(&' se obtiene mediante rotaci*nes y traslaciones de!inidas con respecto al
sistema !io O X"#$ la matriz 9omog:nea que representa cada trans!ormaci*n se deber pre,
multiplicar sobre las matrices de las trans!ormaciones pre%ias.
1
Herramientas matemticas 79
3. Si el sistema O'UVW se obtiene mediante rotaciones y traslaciones definidas con respecto al
sistema mvil, la matriz homognea qe representa cada transformacin se deber! postmltipli"
car sobre las matrices de las transformaciones previas.
Sigiendo estas indicaciones, calqier composicin de matrices homogneas pede estdiarse como
si se realiza cada transformacin con respecto al sistema fi#o o se realiza cada transformacin con
respecto al sistema mvil.
$or e#emplo, la transformacin%
T & T(x,a) T(z,8) T(Y,<I '3.()*
pede verse como na rotacin de + p sobre O,, segida de na rotacin e sobre O- y de na rotacin e.
sobre O/ del sistema fi#o, O tambin pede verse cmo na rotacin e.sobre el e#e OU, segida de na
rotacin e sobre el e#e OW y de na rotacin + p sobre el e#e OV del sistema qe est! siendo
transformado.
y
x
Figura 3.18. Eje mplo de aplicacin de dive rsas transformacione s para localizar un oje to!
0 0 0 1
80 Fundamentos de robtica
3.3.5. Grficos de transformacin
Es frecuente encontrar situaciones en las que la localizacin espacial de un objeto o de su sistema de
referencia asociado, pueda realizarse a travs de la composicin de diversas transformaciones distintas.
En la Figura 3.18 se tiene un manipulador cuya base est referida al sistema del mundo !"#$ mediante
la transformacin MT%. & su vez, para pasar de la base del manipulador a su e'tremo se utiliza la
transformacinRTE.
El e'tremo de la (erramienta est referido con respecto al e'tremo del manipulador por la
transformacin ETH. & su vez, un objeto est referido con respecto al sistema !"#$ mediante la
transformacin M)o, y por *ltimo, el e'tremo de la (erramienta est referido con respecto al objeto a
travs de la transformacin+)H.
,e observa que el final de la (erramienta puede ser referido con respecto al sistema !"#$ de dos
maneras distintas- a travs del manipulador y a travs del objeto. .e tal manera que se puede escribir-
/3. 012
M
o
R
E
H
Figura 3.19. Grfico de transformacin.
Esta relacin se puede representar mediante un grfico de transformacincomo el de la Figura 3.13
[PAUL-81]. .e tal manera que si se quiere obtener la relacin entre el objeto y la (erramienta bastar
multiplicarambos miembros de la ecuacin anterior por MTo41 obtenindose-
/3. 012
5ualquier otra relacin puede ser obtenida fcilmente a partir del grfico. 6ara ello se ir desde el
objeto inicial al final multiplicando las matrices de transformacin correspondiente a los arcos del
grfico, y considerando que de recorrerse stos en el sentido inverso a las flec(as deber utilizarse una
matriz inversa. &s7 la relacin entre la base del robot y el objeto vendr dada por-
Herramientas matemticas 81
o bien por:
3.4. APLICACIN DE LOS CUATERNIOS
En el epgrafe 3.2.4 se defini de forma genrica lo que es un cuatemio. A continuacin se describe el
lgebra de cuatemios y las aplicaciones en las que la utilizacin de cuatemios supone una enta!a
sustancial sobre otros mtodos de descripcin espacial.
3.4.1. lgebra de cuaterni!
"n cuatemio est formado por cuatro componentes (Q o,Q ,Q 'J.,q3) que representan las coordenadas del
cuatemio en una base "e#i#$#%&.
#3. $2%
&obre los elementos de la base se define una ley de composicin interna o 'producto( seg)n se
muestra en la *abla 3.+. ,e este modo los cuatemios forman un grupo cclico de orden cuatro. A
continuacin se describen algunas propiedades )tiles de los cuatemios a la -ora de su utilizacin para
realizar transformaciones.
Tabla 3.1. Le de composicin interna de los cuaternios
o e i j
e e j
'e .
j j -k 'e
. . j 'i
k
k
-j
'e
Cuaterni cn$ugad
A todo cuatemio / se le puede asociar su con!ugado /01 en el que se mantiene el signo de la parte
escalar y se inierte el de la ectorial.
r
I
I
++
u
'd
82 Fundamentos de robtica
[3. 53]
Operaciones algebricas
Se definen tres operaciones algebricas sobre los cuatemios: producto, suma y producto con un escalar.
El producto de dos cuatemios Q1 y Q, !ue "a a ser muy #til para la composici$n de
transformaciones, puede decucirse de la %abla 3.1., y "iene dado por:
[3. 5&]
Se obser"a !ue no se trata de un producto conmutati"o. Si se e'presa componente a componente:
q 3 0 ( q 1 0 q 20 - ( q 1 1 q 21 + q 1 2q 22 + q I 3 q 23 )
q 31 ( q 1)q 1 + q 11q ) + q 1q 3 * q 13q
q 3 2 ( q 1 0 q 22 +q 1 2 q 20 + q 1 3 q 21 - q 1 1 q 23
q 3 3 ( q 1 0 q 23 + q 1 3 q 20 + q 1 1 q 22 - q 1 2 q 21
[3. 55]
+a suma de dos cuaternios Q1 y Q se define como:
[3. 5,]
mientras !ue el producto por un escalar es:
[3. 5-]
El producto de cuatemios es por tanto asociati"o aun!ue no conmutati"o.
.orma e in"erso
Seg#n la definici$n del cuatemio con/ugado y la del producto de cuatemios, se deduce !ue:
Q o Q * ( ( q ~ + q ~ + q ~ + q D e [3. 50]
1l n#mero real 2q 0 2 + q 1 2 + q 22 + q 3 2) 1 / 2 se le denomina norma de Q y se representa por I I Q I I . El
in"erso de un cuatemio puede 3allarse mediante la e'presi$n:
[3. 54]
siempre y cuando se trate de un cuatemio no nulo.
Herramientas matemticas 83
3.4.2. Utilizacin de los cuaternios
Las propiedades expuestas propician el uso de los cuatemios para la representacin y composicin de
rotaciones. Para ello, primeramente se define aquel cuatemio que representeun giro de valor 8sobre un
ee ! como"
# =$ot%!, 8) =(cos &.,! sen &' (3. )*+
,emplo 3.8.
-btener el cuatemio que representa una rotacin de .*/ sobre el ee !%3,02, 1'.
2plicando la ecuacin (3.)*+"
(
.Ji .Ji .Ji.Ji 3
# 4 $ot%! .*/' 4 0 30 020 0
, 2' 2' 2' 2
#o%-,r'o#5
(3.)1+
,n segundo lugar, la aplicacin de la rotacin expresada por el cuatemio # a un vector r, vendr6
definidapor el producto"
,emplo 3...
-btener el vector r7 resultante de aplicar la misma rotacin del ,emplo 3.8. $ot%!,.**' donde
!%3,02, 1', sobre el vector r%8,2,0)'.
2plicando la ecuacin (3.)1+ se obtiene el vector r7"
La composicinde rotaciones con cuatemios resulta tan sencilla como multiplicar cuatemios entre s9.
:e tal forma que el resultado de rotar seg;n el cuatemio #<, para posteriormente rotar seg;n #2, es el
mismoque el de rotar seg;n#3, obtenidopor la expresin"
:f
84 Fundamentos de robtica
[3. 62]
Es importante tener en cuenta el orden de multiplicacin, pues como se ha mencionado, el producto
de cuatemios no es conmutativo.
En el caso de componer rotaciones con traslaciones se procede como sigue: el resultado de aplicar
una traslacin de vector p seguida de una rotacin Q al sistema OXYZ, es un nuevo sistema O!", tal
#ue las coordenadas de un vector ren el sistema OXYZ, conocidas en O!", ser$n:
%O,rXYz) & ' o%O,ruv()o '* + %O,,,:)
,)
\
[3. 63]
El resultado de primero rotar - luego trasladar al sistema vendr$ dado por:
[3. 6.]
/i se mantiene el sistema OXYZ 0i1o - se traslada el vector r seg2n p - luego se le rota seg2n Q se
o3tendr$ el vector r' de coordenadas:
%O,r4) & ' o%O,r +p)o '* [3. 65]
ysi se aplica primero el giro - despu6s la traslacin p al vector r, 6ste se convertir$ en el r' a trav6s
de la e7presin:
%O,r4) &'o%O,r)o'* +%O,p) [3.66]
/e o3serva #ue el empleo de cuatemios para la composicin de rotaciones es un m6todo
computacionalmente mu- pr$ctico, pues 3asta multiplicar cuatemios entre s8, lo #ue corresponde a una
e7presin de productos - sumas mu- simple. Esta es su principal venta1a, tal - como se ver$ en la
comparacin de los distintos m6todos.
3.5. RELACIN Y COMPARACIN ENTRE LOS DISTINTOS MTODOS
DE LOCALIZACIN ESPACIAL
En los ep8gra0es anteriores se han e7plicado una serie de m6todos para poder reali9ar la locali9acin
espacial de un slido - de su sistema de re0erencia asociado. :ada uno de ellos presenta una serie de
caracter8sticas #ue le hacen m$s o menos apto para una determinada aplicacin. ;s8, algunos slo sirven
Herramientas matemticas 85
1 1
!
para la representacin de orientacin, mientras otros, por ejemplo, son especialmente tiles para la
composicinde rotaciones.
En este apartado se analizan las ventajas e inconvenientes de cada uno de ellos, adems de estudiar
cmo se puede realizar el paso, cuando ste es posible, de uno a otro.
3.5.1. Comparacin de mtodos de localizacin espacial
En un principio todos los mtodos expuestos son equivalentes, pero dependiendo del uso que se vaya a
hacer, ser ms adecuado emplear un procedimiento u otro.
La comparacin se realiza undamentalmente en razn a su capacidad para la realizacin de cuatro
cuestiones bsicas de toda transormacin.
1 . !apacidad de representacin conjunta de posicin y orientacin.
". #epresentar la posicin y orientacin de un sistema rotado y trasladado $%&'( con respecto a
un sistema ijo de reerencia $)*+. ,ue es lo mismo que representar una rotacin y traslacin
realizada sobre un sistema de reerencia.
-. .ransormar un vector expresado en coordenadas con respecto a un sistema $%&'(, a su ex/
presin en coordenadas del sistema de reerencia $)*+.
0. #otar y trasladar un vector con respecto a un sistema de reerencia ijo $)*+.
1atrices de transormacin homo2nea
3us principales ventajas residen en su capacidad de representacin conjunta de posicin y orientacin y
en la comodidad con la que se puede realizar la composicin de transormaciones. 4ara ello bastar
nicamente multiplicar, en el orden adecuado, las matrices de transormacin correspondientes. Es
posible, adems, la aplicacin de una transormacin sobre un vector reerido a un sistema ijo
nicamentemultiplicandola matriz de transormacin correspondiente por el vector.
!omo principal inconveniente presenta su alto nivel de redundancia 5necesita deinir 1 "componentes
para slo 6 2rados de libertad7. Esto diiculta su implementacin en computador.
3e trata del mtodo ms popular, pues adems de trabajar con matrices, cuya l2ebra es extensamente
conocida, es capaz de realizar las cuatro cuestiones apuntadas anteriormente.
8n2ulos de Euler
Los n2ulos de Euler, en cualquiera de sus modalidades, slo son capaces de representar orientacin, y
aunque permiten una notacin compacta 5slo tres nmeros reales7, son di9ciles de manejar para la
composicinde rotaciones y para su aplicacin sobre un vector.
4ar de rotacin
El par de rotacin slo sirve para la representacin de orientaciones. Es compacto, pues nicamente usa
0 parmetros para la deinicin de orientacin de un sistema con respecto a otro. 3e puede aplicar para la
rotacin de un vector r un n2ulo : alrededor del eje ;. 3in embar2o, la composicin de rotaciones
presenta una expresin complicada, lo que limita su utilizacin prctica en al2unas aplicaciones.
j
I
I
i
1 I
86 Fundamentos de robtica
Cuaternios
El cuatemio, como tal, slo es capaz de representar la orientacin relativa de un sistema O'UVW con
respecto a otro, a travs del uso de cuatro componentes. Sin embargo, como se ha visto en 3..!, es
posible componer rotaciones "unto con traslaciones de #orma bastante simple y computacionalmente
econmica. $uede aplicarse tambin para la trans#ormacin de un vector tanto en traslacin como en
rotacin.
3.5.2. Relacin entre los distintos mtodos de localizacin espacial
%a &ue los mtodos vistos para la representacin espacial son e&uivalentes, es decir, e'presan lo mismo
de #orma distinta, deber( e'istir un modo de pasar de un tipo de representacin a otro. A continuacin se
muestran las relaciones de paso &ue se utilizan m(s #recuentemente. A travs de ellas es posible pasar de
una representacin a cual&uier otra, aun&ue en algunos casos sea m(s cmodo utilizar una representacin
au'iliar intermedia.
ngulos de Euler: Matriz de transformacin homognea
%a se ha mencionado en varias ocasiones &ue los (ngulos de Euler slo son capaces de realizar una
representacin de la orientacin. $or ello, a la hora de obtener la matriz homognea e&uivalente a un
con"unto de (ngulos de Euler dados, )nicamente &uedar( de#inida la submatriz de rotacin R3x3
*elacin directa
+a obtencin de la matriz homognea correspondiente a cada con"unto de (ngulos de Euler es inmediata,
bastar( con componer las matrices &ue representan las rotaciones &ue de#inen los propios (ngulos-
. Sistema ZXZ
Este sistema responde, seg)n el ep/gra#e 3.!.!, a la composicin de la siguiente secuencia de rotaciones-
Tz'z =T(z,~)T(u,8)T(w,\jf) 03. 123
&ue desarrollado en #orma matricial-
4 5 6
- S < j> O O 5 O O O
C'II -S'II O O
T =T(z, < 1 T(u, e )T( 7, 'V ) =
S < 1 >
C < j> O O O c e 8so O
S'II C'II
O O
=
O O 5 O O s e c e O O O 5 O
O O O 5 O O O O O O
03. 193
C<I>C'II - S < > c e s ! - C<I>S'II - S<I>C8C'II S < > S 8 O
S<I>C'II "C<I>C8S'II - S<I>S'II "C<I>C8C'II - C < > S 8 O
S8S'II S8C'II C 8 O
O O O 5
Herramientas matemticas 87
Sistema ZYZ
Segn el epgrafe 3.2.2, el paso del sistema fijo al girado se hace realizando la siguiente secuencia de
rotaciones:
T T! z, "j# $ T! %, S$ T! &, \If )
'3.()*
+ue desarrollado en forma matricial:
T T!z, "j,T!-, S $T!., \If)
'3. /0*
y de forma matricial:
1"j# 2S"j# 3 3 1S 3 se 3 3 3 3
T T!z, "j,T!-,e$T!., 45f$
S"j# 1"j# 3 3 3 0 3 3 3
145f -S\If 3
3 3 0 3 2se 3 ce 3 3
S45f 145f
3
3 3 3 0 3 3 3 0 3 3 3 0
'3. /2*
c"j#ce 1"j#ses45f 2 S"j#145f 1"j#sec45f +S"j#S45f 3
s"j#ce
S"j#ses45f + 1"j#145f S"j#sec45f 2 1"j#S45f 3
2se
ces% cec% 3
3 3 3
3 , 2S"5# 3 3 ce 3 se 3
145f -S\If 3 3
T T! z, "0# $ T! %, e$ T! w ,45f$
S "0# 1"5#
3 3 3 0 3 3
S45f 145f
3 3
3 3 0 3 2se 3 ce 3 3 3 0 3
3 3 3 0 3 3 3 0 3 3 3 0
'3. /6*
1"5#ce145f 2 S"j#S45f 2 1"5#ces45f 2 S"5#145f c"j#se 3
S"5#cec45f + 1"5#S45f 2 s"5#ces45f +1"j#145f seso 3
- sec\If sose ce 3
3 3 3 0
7oll28itch2Ya&
9e igual forma +ue en los casos anteriores, estos :ngulos de ;uler se pueden representar mediante la
concatenaci<n de las siguientes rotaciones:
88 Fundamentos de robtica
Relacininversa
El paso de la representacin mediante matriz homognea a cualquiera de los conjuntos de ngulos de
Euler vistos no es trivial, pues se necesita resolver una serie de ecuaciones trigonomtricas acopladas.
Par de rotacin: Matriz de transformacin homognea
Al igual que en el caso de los ngulos de Euler, mediante un eje y ngulo de rotacin slo es posible
representar orientacin; de ah que !nicamente quede de"inida la submatriz de rotacin R#$# de la matriz
homogneade trans"ormacin.
Relacindirecta
%e quiere descomponer el giro de un ngulo & alrededor del eje k(kx,ky,kz) en la composicin de
rotaciones bsicas que se puedan e$presar mediante matrices bsicas de rotacin.. Esto se consigue
realizandouna serie de rotaciones para alinear el eje ' con uno de los ejes coordenados, por ejemplo el
(), girar el ngulo & con respecto a l y deshacer las rotaciones previas hasta tener el vector ' en su
posicin inicial. *iendo la +igura #.,-, esto se consigue mediante la siguientecomposicin.
/0',e1 2 /0$,3a1/0y,41/0z,e1/0y,341/0$,a1 5#. 6#7
y
z
$
Figura 3.20. ngulo y eje de rotacin.
"~
l i t
Herramientas matemticas 89
Teni endo en cuent a l as si gui ent es rel aci ones:
[3.74]
Expresndol o en forma mat ri ci al y sust i t uyendo en l a ecuaci n [3.73] se t i ene l a mat ri z homognea
!ue expresa l a rot aci n al rededor del e"e # de un ngul o $:
k;v8+ce kXky %e & kzse kxkz %e +ky se o
kxky %e +kz se k:ve+ce kykz %e & k ; se o
T(k.B) =
kxkz %e & ky se kykZ %e +k~se k; %a& ce o
[3. 7']
o o o 1
donde ( represent a el t rmi no verseno defi ni do como %e == ) & ce.
*el aci n i n%ersa
+e !ui ere o,t ener un e"e # y un ngul o $ de rot aci n e!ui %al ent e a l a represent aci n de una rot aci n
medi ant e l a mat ri z homognea de rot aci n:
nx ox ax -
ny a y ay -
Rot= [3. 7.]
nz - z az -
- - - 1
+e podrn i gual ar l as mat ri ces de l as expresi ones [3.7'] [3.7.] y real i zar una e!ui %al enci a
component e a component e. /onsi derando el ngul o $ como posi t i %o ent re 01 y )$012 se puede l l egar a
l as si gui ent es expresi ones t ant o para el ngul o $ como para l as component es del %ect or:
[3. 77]
z-ay
k 3 4 444::4
x 5sene
a -n
k 3 x z
y 5sene
ny- 0x
k =--=---
z 5sene
90 Fundamentos de robtica
Cuando el ngulo 8 se acerca a 00 o a 1800 aparecen problemas de indeterminacin en las ecuaciones
anteriores. Por ello, en estos casos es necesario realizar otro tipo de aproximacin. sta se describe con
detalle en [PAUL-81].
Par de rotacin: Cuaternios
Relacin directa
Por la propia definicin de cuatemios dada en el epgrafe .!.", un cuatemio Q se puede expresar como#
$. %8&
y componente a componente#
e
q ' k sen(
I x !
$. %)&
e
q ' k sen(
! y 2
e
q =k sen(
z 2
Relacin in*ersa
+a relacin in*ersa se obtiene fcilmente de las anteriores expresiones#
e =! arcos, qo)
k ' ql
x (1_q~)"2
$. 80&
Cuaternios: Matriz de transformacin homognea
-l paso de cuatemios a la matriz de transformacin .omog/nea, y *ice*ersa, se pueden deducir
fcilmente utilizando como representacin auxiliar intermedia el e0e y ngulo de rotacin. 1
continuacin se expresan las relaciones finales, ob*iando los desarrollos intermedios 2ue se pueden
encontrar en [HAMILTON-69].
Herramientas matemticas 91
Relacin directa
La representacin de la matriz de transformacin T en funcin de las componentes de un cuatemio Q
viene dada por la siguiente matriz [BEGGs-83]:
o o
q; +q~-"2 q, q2 - q3qO q,q3+q2qO
O
o o
T=2
q, q2 +a,; e; +q;-2 q2q3-q,qO O
[3! 8]
o
Q,q3-q2qo Q2Q3+Q,QO Q; +Q;-2
O
O O O 1
Relacin inversa
La relacin inversa se puede o"tener f#cilmente igualando la traza y los elementos de la diagonal
principal de la matriz [3!8] con la de la matriz [3!$%]:
Qo= ~~(nx+Oy+az+1)
Q, =~~(nx-oy-az+ &
Q2= ~~(-nx+Oy-az+1)
Q3' ( ~(-n-oy+az+ &
[3! 8)]
Tabla 3.2. Relacin entre los mtodos de localizacin espacial
*atriz +uaternios ,ar de
-omog.nea rotacin
*atriz -omog.nea [3!8)] [3!$$]
+uaternios [3!8] [3!8/]
,ar de rotacin [3!$0] [3!$1]
Euler 232 [3!%8]
Euler 242 [3!$/]
Euler R,4 [3!$)]
92 Fundamentos de robtica
La Tabla 3.2 recoge de forma condensada las relaciones posibles entre los distintos mtodos de
localizacinespacial y cules son las expresiones que los relacionan.
3.6. BIBLIOGRAFA
[BA!"#T$%&'() A. Barrientos* +%oft,are de base para un robot de la segunda generacin+* en- Sis
tema operativo y lenguaje de programacin para robots dotados de sensores, Tesis .octoral* .!/
%A0* 1ni2ersidad 3olitcnica de 0adrid* 45'(.
[B"66s&'3)7.%. Beggs* Kinematics, %pringer 8erlag* Berlin* 45'3.
[9o:"&5()3.! 9or;e* "A obotics Toolbox for 0atlab+* IEEE Robotics &Automation aga!ine,
8ol. 3* no. 4* marzo 455(.
[<u&'') <u* :.%.* 6onzlez* .9. y Lee* 9.%.6.* +9inemtica del brazo del robot+* en- Robtica" con
trol, deteccin, visin e inteligencia, 0c6ra,&=ill* 0adrid* 45''.
[=A0!LT$#&(5) =amilton* >..* Elements o# $uaternions, 9?elsea 3ublis?ing 9o. #e, @or;* 45(5.
[3A1L&'4)3aul* .3.* +=omogeneous Transformations+* en- Robot anipulators" at%ematics, &ro
gramming and 'ontrol, T?e 0!T 3ress* 0assac?ussets* 45'4.
1 " ' ! l .
. 1 , !
!
,
La cinemticadel robot estudia el movimientodel mismo con respecto a un sistema de referencia. As, la
cinemtica se interesa por la descripcin analtica del movimiento espacial del robot como una funcin
del tiempo, y en particular por las relaciones entre la posicin y la orientacindel extremo final del robot
con los valores que toman sus coordenadas articulares.
Existen dos problemas fundamentales a resolver en la cinemtica del robot (Fiura !. 1 "# el primero
de ellos se conoce como el problema cinemtico directo, y consiste en determinar cul es la posi$
cin y orientacin del extremo final del robot, con respecto a un sistema de coordenadas que se toma
como referencia, conocidos los valores de las articulaciones y los parmetros eom%tricos de los ele$
mentos del robot# el seundo, denominado problema cinemtico inverso, resuelve la confiuracin
que debe adoptar el robot para una posicin y orientacin del extremo conocidas.
&enavit y 'artenber propusieron un m%todo sistemtico para describir y representar la eometra
espacial de los elementos de una cadena cinemtica, y en particular de un robot, con respecto a un
sistema de referencia fi(o. Este m%todo utili)a una matri) de transformacin *omo%nea para describir
la relacin espacial entre dos elementos ridos adyacentes, reduci%ndose el problema cinemtico
directo a encontrar una matri) de transformacin *omo%nea ! x ! que relacione la locali)acin espa$
cial del extremo del robot con respecto al sistema de coordenadas de su base.
+or otra parte, la cinemtica del robot trata tambi%n de encontrar las relacines entre las velocida$
des del movimiento de las articulaciones y las del extremo. Esta relacin viene dada por el modelo
diferencial expresado mediante la matri) ,acobiana.
, '
I
-aptulo 4
CINEMTICA DEL ROBOT
.uien bien ata, bien desata.
Refranero popular
/0
I
I
I
,
j--
94 Fundamentos de robtica
Cinemtica directa
Valor de las
~ . . . .
Posicin y
~
JI""
coordenadas
~"' "
orientacion del
articulares
i""
extremo del robot
(ql>q" ... ,qJ
Cinemtica inversa
(x.y.z,a,~,'Y)
Figura 4.1. Diagrama de relacin entre cinemtica directa e inversa.
4.1. EL PROBLEMA CINEMTICO DIRECTO
Como se ha visto en el captulo anterior, se utiliza fundamentalmente el lgebra vectorial!matricial para
representar y describir la localizacin de un ob"eto en el espacio tridimensional con respecto a un sistema
de referencia fi"o. #ado que un robot se puede considerar como una cadena cinemtica formada por
ob"etos rgidos o eslabones unidos entre s mediante articulaciones, se puede establecer un sistema de
referencia fi"o situado en la base del robot y describir la localizacin de cada uno de los eslabones con
respecto a dicho sistema de referencia. #e esta forma, el problema cinemtico directo se reduce a
encontrar una matriz homog$nea de transformacin % que relacione la posicin y orientacin del
extremo del robot respecto del sistema de referencia fi"o situado en la base del mismo. &sta matriz %
ser funcin de las coordenadas articulares.
4.1.1. Resolucin del ro!le"a cine"#$ico direc$o "edian$e "a$rices de
$rans%or"acin &o"og'nea
'a resolucindel problema cinemtico directo consiste en encontrar las relaciones que permiten conocer
la localizacinespacial del extremo del robot a partir de los valores de sus coordenadas articulares.
(s, si se han escogido coordenadas cartesianas ! ngulos de &uler para representar la posicin !
orientacin del extremo de un robot de seis grados de libertad, la solucin al problema cinemtico
directo vendr dada por las relaciones)
x * fx(ql'q2,q3,q4,q5,q6)
y f! (ql'q2 .e, .a, ,Q5 ,Q6)
Z * fz(QI'Q2,Q3,Q4,Q5,Q6)
a * fa(QI'Q2,Q3,q4,q5,Q6)
+ * fp(QI'Q2,Q3,Q4,Q5,Q6)
' Y * fy(QI'Q2,Q3,Q4,Q5,Q6)
[4. 1]
Cinemtica del robot 95
La obtencin de estas relaciones no es en general complicada, siendo incluso en ciertos casos
(robots de pocos GDL) fcil de encontrar mediante simples consideraciones geomtricas. Por ejem
plo, para el caso de un robot con 2 GDL (igura !.2), es fcil comprobar "ue#
X 1] cos"$ + 12 cos("$ +q2)
Y ::t: 1] senq] +12 sen(q] +q2)
%!.2$
x
Para robots de ms grados de libertad puede plantearse un mtodo sistemtico basado en la utili&a
cin de las matrices de transformacin 'omognea.
(n general, un robot de n grados de libertad est formado por n eslabones unidos por n articula
ciones, de forma "ue cada par articulacin)eslabn constitu*e un grado de libertad. + cada eslabn se
le puede asociar un sistema de referencia solidario a l *, utili&ando las transformaciones 'omog
neas, es posible representar las rotaciones * traslaciones relati,as entre los distintos eslabones "ue
componen el robot. -ormalmente, la matri& de transformacin 'omognea "ue representa la posicin
* orientacin relati,a entre los sistemas asociados a dos eslabones consecuti,os del robot se suele
denominar matri& .)$+.. +s/ pues, o+$ describe la posicin * orientacin del sistema de referencia
solidario al primer eslabn con respecto al sistema de referencia solidario a la base, $+2 describe la
posicin * orientacin del segundo eslabn respecto del primero, etc. Del mismo modo, denominando
0+k a las matrices resultantes del producto de las matrices .)$+. con i desde 1 'asta 2, se puede repre
sentar de forma total o parcial la cadena cinemtica "ue forma el robot. +s/, por ejemplo, la posicin
* orientacin del sistema solidario con el segundo eslabn del robot con respecto al sistema de coor
denadas de la base se puede e3presar mediante la matri& o+2 :
(x,y)
Figura 4.2. Robot planar de 2 grados de libertad.
1) 4
96 Fundamentos de robtica
[4.3]
De manera anloga, la matriz oA3 representa la localizacin del sistema del tercer eslabn:
A =oA 1 A 2A
3 1 2 3
[4.4]
Cando se consideran todos los grados de libertad, a la matriz !An se le sele denominar ". As#,
dado n robot de seis grados de libertad, se tiene $e la posicin % orientacin del eslabn &inal 'en(
dr dada por la matriz " :
[4.)]
An$e para describir la relacin $e e*iste entre dos elementos contigos se pede +acer so de
cal$ier sistema de re&erencia ligado a cada elemento, la &orma +ab#tal $e se sele tilizar en ro(
btica es la representacin de Dena'it,-artenberg .D,-/. Dena'it % -artenberg [D012A34",))] prop(
sieron en 1 5)) n m0todo matricial $e permite establecer de manera sistemtica n sistema de coor(
denadas 6789ligado a cada eslabn i de na cadena articlada, pdi0ndose determinar a continacin
las ecaciones cinemticas de la cadena completa [PAUL-81].
7eg:n la representacin de D,-, escogiendo adecadamente los sistemas de coordenadas asocia(
dos a cada eslabn, ser posible pasar de no al sigiente mediante 4 trans&ormaciones bsicas $e
dependen e*clsi'amente de las caracter#sticas geom0tricas del eslabn.
;stas trans&ormaciones bsicas consisten en na scesin de rotaciones % traslaciones $e permi(
ten relacionar el sistema de re&erencia del elemento i con el sistema del elemento i,< <as trans&orma(
ciones en cestin son las sigientes .es importante recordar $e el paso del sistema 678,d al 67i9
mediante estas 4 trans&ormaciones est garantizado slo si los sistemas 678,d% 67i9+an sido de&inidos
de acerdo a nas normas determinadas $e se e*pondrn posteriormente/:
1 . =otacin alrededor del e>e ?8,ln nglo 7i.
2. "raslacin a lo largo de ?8@4 na distancia d, A 'ector d, .B,B,d8/.
3. "raslacin a lo largo de C8na distancia a8A 'ector a8.B,B,a8/.
4. =otacin alrededor del e>e C8n nglo .C8.
Dado $e el prodcto de matrices no es conmtati'o, las trans&ormaciones se +an de realizar en el
orden indicado. De este modo se tiene $e:
8,lA8 = " .z,D8/ ".B,B,d8/ T(a, ,E,E/ T(x.rx.) [4.F]
% realizandoel prodcto entre matrices:
1 ' 1
1 I 1
Cinemtica del robot 97
ce -se o o 1 o o o 1 o o a 1 o o o
I
-lA, =
se ce o o o 1 o o o 1 o o o co , -So , o
I
o o 1 o o o 1 d o o 1 o o Su Cu o
o o o 1 o o o 1 o o o 1 o o o 1
C8 -co .se, SuS8 aC8
[4.7]
S8 CuC8 -SuC8 aS8
o Su Cu d
o o o 1
do nde S , a , d, ,(X so n lo s parmetro s D-H del esla!n i. De este mo do , asta co n "dent"#"car lo s
parmetro sS, a, d , (Xpara o tener las matr"ces A $ relac"o nar as% to do s y cada uno lo s eslao nes del
ro o t.
Co mo se &a "nd"cado , para 'ue la matr"( .)A,de#"n"da en [4.7] relac"o ne lo s s"stemas *S"+$ *S-l+,
es necesar"o 'ue lo s s"stemas se &a$an esco ,"do de acuerdo a unas determ"nadas no rmas. -stas, .unto
co n la de#"n"c"!n de lo s 4 parmetro s de Dena/"t Hartener,, co n#o rman el s",u"ente al,o r"tmo para la
reso luc"!n del pro lema c"nemt"ca d"recto 0
4.1.2. Algoritmo de Dena/%t-Hartener, para la obtencin del modelo
cinemtico directo
D-H 1 . 1umerar lo s eslao nes co men(ando co n 1 (pr"mer esla!n m!/"l de la cadena2 $ acaando
co n n (3lt"mo esla!n m!/"l2. Se numerar co mo esla!n 4a la ase #".a del ro o t.
D-H 5. 1umerar cada art"culac"!n co men(ando po r 1 (la co rrespo nd"ente 6alpr"mer ,rado de l"er7
tad2 $ acaando en n.
D-H 8. 9o cal"(ar el e.e de cada art"culac"!n. S" :sta es ro tat"/a, el e.e ser su pro p"o e.e de ,"ro . S"
es pr"smt"ca, ser el e.e a lo lar,o del cual se pro duce el despla(am"ento .
D- H 4. ;ara ide 4a n-l s"tuar el e.e <so re el e.e de la art"culac"!n "=1 .
D-H >. S"tuar el o r",en del s"stema de la ase *So +en cual'u"er punto del e.e <o .9o s e.es Xoe ?ose
s"tuarn de mo do 'ue #o rmen un s"stema de@tr!,"ro co n (o ,
D-H A. ;ara " de 1 a n-l, s"tuar el s"stema *S"+ (so l"dar"o al esla!n "2 en la "ntersecc"!n del e.e <
co n la l%nea no rmal co m3n a <-l$ <.S" amo s e.es se co rtasen se s"tuar%a *S"+en el punto de co rte. S"
#uesen paralelo s *S"+se s"tuar%a en la art"culac"!n "=1 .
D-H 7. S"tuar Xen la l%nea no rmal co m3n a <-l$ <.
98 Fundamentos de robtica
D-H 8. Situar y de modo que forme un sistema dextrgiro con Xy Z.
D- H 9. Situar el sistema {Sn} en el extremo del root de modo que !" coincida con la direccin de
Zn-#$x" sea normal a Zn-#$Zn%
D-H &'. (tener S como el )ngulo que *ay que girar en torno a Z+#,ara que X+#$Xqueden ,ara-
lelos.
D-H &&. (tener d" como la distancia" medida a 1 0 largo de Z+#"que *ar.a que des,la!ar {S+#},a-
ra que Xy X+#quedasen alineados.
DH &/. (tener a como la distancia medida a 1 0 largo de X0que a*ora coincidir.a con X+#1que *a-
r.a que des,la!ar el nue2o {S+#},ara que su origen coincidiese con {S}.
DH &3. (tener ex como el )ngulo que *ar.a que girar entorno a X 0que a*ora coincidir.a con
X+#1" ,ara que el nue2o {S+#}coincidiese totalmente con {S}.
DH &4. (tener las matrices de transformacin -#5definidas en 64.78.
DH &9. (tener la matri! de transformacin que relaciona el sistema de la ase con el del extremo
del root : ; <5#"#5/.. n-#5n.
DH &=. >a matri! : define la orientacin 0sumatri! de rotacin1 y ,osicin 0sumatri! de trasla-
cin1 del extremo referido a la ase en funcin de las n coordenadas articulares.
articulacin i+ 1
Si+l
?igura 4.3. Parmetros D-H para un eslabn giratorio.
Cinemtica del robot 99
Los cuatro parmetros de D-H (S, di, a., (X)dependen nicamente de las caractersticas geomtri
cas de cada esla!n " de las articulaciones #ue le unen con el anterior " siguiente. $n concreto estos
representan (%igura &.')(
) $s el ngulo #ue *orman los e+es X.l" Xmedido en un plano perpendicular al e+e ,-.,uti
li/ando la regla de la mano derec0a. Se trata de un parmetro 1ariale en articulaciones
giratorias.
d, $s la distancia a lo largo del e+e ,-ldesde el origen del sistema de coordenadas (i-.)
simo 0asta la intersecci!n del e+e ,-lcon el e+e 2, Se trata de un parmetro 1ariale en
articulaciones prismticas.
a $s la distancia a lo largo del e+e X#ue 1a desde la intersecci!n del e+e ,-.con el e+e X
0asta el origen del sistema i-simo, en el caso de articulaciones giratorias. $n el caso de
articulaciones prismticas, se calcula como la distancia ms corta entre los e+es ,-l3,.
(X $s el ngulo de separaci!n del e+e ,-l " el e+e ,,medido en un plano perpendicular al e+e
Xi,utili/ando la regla de la mano derec0a.
4na 1e/ otenidos los parmetros D-H, el clculo de las relaciones entre los eslaones consecuti
1os del root es inmediato, "a #ue 1ienen dadas por las matrices 5, #ue se calculan segn la e2presi!n
general 6&.78. Las relaciones entre eslaones no consecuti1os 1ienen dadas por las matrices 9 #ue,
como "a se coment! anteriormente, se otienen como producto de un con+unto de matrices 5.
Figura 4.4. :oot cilndrico del $+emplo &.;.
100 Fundamentos de robtica
Obtenida la matriz T, sta expresar la orientacin (submatriz (3 x 3) de rotacin) y posicin
(submatriz (3 x 1) de traslacin) del extremo del robot en funcin de sus coordenadas articulares, con
lo que quedar resuelto el problema cinemtico directo.
Tabla 4.1. Parmetros D-H para el robot cilndrico de la Figura 4.4.
rticulacin ! d a
a
1
"
3
4
o
#$
O
O
O
O
O
O
%
Ejemplo 4.1.
&on el fin de ilustrar el mtodo expuesto anteriormente, se 'a a desarrollar a continuacin la reso(
lucin completa del problema cinemtico directo para un robot cil)ndrico.
*n primer lu+ar, se localizan los sistemas de referencia de cada una de las articulaciones del ro(
bot (,i+ura %.%). -osteriormente se determinan los parmetros de .ena'it/0artenber+ del robot,
con los que se construye la Tabla %.1. 1na 'ez calculados los parmetros de cada eslabn, se cal(
culan las matrices , sustituyendo en la expresin +eneral 2%.34 de la si+uiente manera5
e6 /78 O O O O 1 O
76 e6 O O 1 O O O
96:
O O 1 16
6" :
O 1 O d"
O O O 1 O O O 1
1 O O O &% /7% O O
" 3 :
O 1 O O
3% :
7%
e% O O
O O 1 d3 O O 1
1%
O O O 1 O O O 1
s) pues, se puede calcular la matriz T que indica la localizacin del sistema final con respecto
al sistema de referencia de la base del robot.
/76&%
767% &6 &6(d3 ;1%)
T:o 6 " 3 :
c6e% /&<7% 76 7< (d , ; 1%)
6 " 3 %
7%
e% O d" ; 16
O O O 1
Tabla 4.2. Parmetros D-H para un robot IRB6400C
Articulacin
8
d a e x
1
81 O O -90
2
82 11 O 90
I
,
3 8r90 O -h
90
4
84 h
O -90
5 85 O O 90
6 86 14 O O
Cinemtica del robot 101
Ejemplo 4.2.
Se va a de sarrollar a continuacin la re solucin comple ta de l prole ma cine m!tico dire cto para un
root "#$6400%&
'n prime r lu(ar) * si(uie ndo e l al(oritmo de +e navit-,ate ne r() se locali-an los siste mas de re .
/e re ncia de cada una de las articulacione s de l root 01i(ura 4&52&3oste riorme nte se de te rminan los
par!me tros de +e navit-,arte ne r( de l root) con los 4ue se constru*e la 5ala 4&2& Se calculan
ahora las matrice s A, sustitu*e ndo e n la e x pre sin (e ne ral de la si(uie nte mane ra6
o o
o
O
O
1
O
-1
O
O -e5 O
100
O O 1
O O
O O
1 14
O 1
102 Fundamentos de robtica
12
Z
u ~ 5
X5
. ) J Z '
Figura 4.5. Asignacin de ejes de referencia para el robot IRB6400Cdel Ejemplo 4.2.
As pu es, se pu ede calcu lar la matriz T qu e indica la localizacin del sistema asociado al ex
tremo del ro!ot con respecto al sistema de re"erencia de la !ase del ro!ot#
nx
x
ax
Px
T$oA lA 2A %A 4A 5 A $
ny 0y ay
Py
$ & 2 % 4 5 '$
nz
z
az
Pz
( ( ( 1
A continu acin se desarrollan los t)rminos de la matriz T .
T ' ' F ! ,
Cinemtica del robot 103
= ; = (CC2S) +S,C})(C4C5C -S4S)+C,S2(S4CSC +C4S)+(-C,Cz C} +S,SJSsC
lly = (-S,CzS) +S,CJ(C4CSC -S4S)+S,S2 (S4CSC +C4S)+(-S,C2C3 -C,S3)SSC
I1z = (-S2SJ(C4CSC -S4S)+C2 (S4CSC +C4S)+S2C}SSC
(C,C2S3 +S,C3)(-C4CSC -S4S)+C,S2(-S4CSC +C4S6)+(-C,C2C3 +S,S3)(-SSC6)
(-S ,CZ S3 +S ,C3)(-C4CSC -S4S6 )+S,S2 (-S4CSC +C4S)+(-S,C2C) -C,S3 )(-SsC)
(-S2S) )(- C4CSC6 -S4S6) + C2(-S4 CSC + C4S)+S2C3 (-SsC)
(CCZ S3 +S,C3)(14C4Ss)+C,S2(14S4Ss)+(CC2C) +SSJ(-14Cs +13)+
(-12C,C2S3 -12S,C3 -i.s.)
v, = (-SI C2S3 -C ,C3) (14C4Ss)+ SIS2(14S4Ss)+ (- CI C2C3 - CIS3) (-14 e, + 13)+
(-12SIC2S3 -12CIC3 +1,C,)
r. = (-S2S3)(14C4Cs)+C2(14S4Ss)+S2C}(-14Cs +13)+12S2S3
o,
=
Oy =
Oz
=
P, =
Para cac!ar as ec!aci"#es a#$eri"res se #ecesi$a reaiz ar 12 a%a&as a '!#ci"#es $ra#sce#(
&e#$es, a&e%)s &e #!%er"sas s!%as y *r"&!c$"s, $e#ie#&" e# c!e#$a +!e e ,ec$"r a se cac!a c"(
%" e *r"&!c$" ,ec$"ria &e "s ,ec$"res # y" (a = # - ").
C"%" se ,e, e# es$as ec!aci"#es +!e&a re'e.a&" e ,a"r &e a *"sici# (Px , Py, pz) y "rie#$a(
ci# (#,",a) &e e-$re%" &e r"/"$ e# '!#ci# &e as c""r&e#a&as ar$ic!ares (01,02,03,04,05,06)1
4.1.3. Resolucin del problema cinemtico directo mediante el uso
de cuaternios
P!es$" +!e as %a$rices &e $ra#s'"r%aci# 2"%"34#ea y "s c!a$er#i"s s"# %4$"&"s a$er#a$i,"s *ara
re*rese#$ar $ra#s'"r%aci"#es &e r"$aci# y &es*az a%ie#$", ser) *"si/e !$iiz ar es$"s 5$i%"s &e %a#era
e+!i,ae#$e a as %a$rices *ara a res"!ci# &e *r"/e%a ci#e%)$ic" &irec$" &e !# r"/"$.
Para acarar e !s" &e "s c!a$er#i"s c"# es$e 'i#, se ,a# a !$iiz ar a c"#$i#!aci# *ara res",er e
*r"/e%a ci#e%)$ic" &irec$" &e !# r"/"$ $i*" SC676 c!ya es$r!c$!ra 3e"%4$rica se re*rese#$a e# a
8i3!ra 4.6.
9 *r"ce&i%ie#$" a se3!ir ser) e &e "/$e#er a e-*resi# +!e *er%i$e c"#"cer as c""r&e#a&as &e
a *"sici# y "rie#$aci# &e sis$e%a &e re'ere#cia as"cia&" a e-$re%" &e r"/"$ :S4} c"# res*ec$" a
sis$e%a &e re'ere#cia as"cia&" a a /ase :S"}. 9s$a reaci# ser) '!#ci# &e as "#3i$!&es 11,hy h&e
"s ee%e#$"s &e r"/"$ as; c"%" &e as c""r&e#a&as ar$ic!ares ql, q2, qs <q .
Para "/$e#er a reaci# e#$re :S"} y :S4} se ir) c"#,ir$ie#&" s!cesi,a%e#$e :S"} e# :S}, :S2},
:S3} y :S4} se35# a si3!ie#$e serie &e $ra#s'"r%aci"#es=
104 Fundamentos de robtica
1. Desplazamiento de {So} una distancia l a lo largo del eje Zo y giro un ngulo q alrededor del
eje Zo, llegndose a {S }.
2. Desplazamiento de {SI} una distancia ha lo largo del eje x, y giro un ngulo q2 alrededor del
nuevo eje z , para llegar al sistema {S2}.
3. Desplazamiento a lo largo del eje 2 una distancia b para llegar al sistema {S3}.
!. Desplazamiento de {S3} una distancia q3 a lo largo del eje Z3 "giro en tomo a Z! de un ngulo
q4 , llegndose #inalmente a {S4}.
De manera a$reviada las sucesivas trans#ormaciones %uedan representadas por&
So 'S& ()z,l* Rot(z,q )
S 'S2& ()x,l2* Rot(Z,q2)
S2 ' S3& ()x,l3* +ot)z,,*
-!. ./
S3 ' S!& T(Z,-q3) Rot(Z,Q4)
Figura 4.6. Asignacin de sistemas de referencia en un robot SCARA.
Cinemtica del robot 105
donde los desplazamientos quedan definidos por los vectores:
PI = (0,0,11)
P? = O? ,0,0)
P3 = 03,0,0)
P4 = (0,0,-Q3)
[4.9]
y los iros por los cuatemios:
!" =#$pO%O%&")
!' = #$'%(%(%&')
!3 = #1%(%(%()
[4. 1(]
donde:
) #q.)
$* = cos +t
) #q.)
&* = sen +t
[4.11]
,plicando las ecuaciones [3.-'] y [3.-3] de uso de cuatemios% un o./eto localizado en el sistema
de referencia 0&*1 por su vector de posici2n a* y su cuatemio de rotaci2n 3* % tendr4 en el sistema de
referencia 0&*+d el vector de posici2n a*51y el cuatemio 3*5"siuientes6:
#O%a*5") =!* #O%a*)!7 +#O%p*)
36I =!.3.
1- 1 "
[4.1']
donde p% y !* son respectivamente el desplazamiento y posterior rotaci2n que permiten convertir 0&*5"1
en 0&*1. ,plicando reiteradamente la e8presi2n anterior a los sistemas de referencia 0&o1%0&"1%{S, 0&31
y 0&41se tendr4:
I Por claridad en la e8posici2n% se 9a suprimido el s:m.olo o de producto entre cuaternios.
106 Fundamentos de robtica
(O,ao) = Q, (O,a, )Q; + (O,p,)
Ro = Q,R,
(O,a,) = Q2(0,a2)Q; +(0,P2)
R, =Q2R2
(0,a2) = Q3 (0,a3 )Q; + (0,P3)
R2 = Q3R3
(0,a3) = Q4(0,a4)Q: +(0,P4)
R3 = Q4R4
Sustituyendo de manera consecutiva en as e!presiones anteriores, se o"tiene:
(O,ao) =Q, #Q2# Q3 #Q4 (0,a4 )Q: + (0,P4 )$Q; + (0,P3) $Q; + (0,p2) $Q: + (O,p,) =
= Q,Q2Q3Q4(0,a4)Q:Q;Q;Q; +Q,Q2Q3(0,P4)Q;Q;Q; +
+ Q,Q2 (0,P3)Q;Q; + Q, (0,P2)Q; + (O,p,) =
= Q%234(0,a4)Q;234 + Q&23(0,P4)Q;23 +Q%2(0,P3)Q;2 +Q,(0,P2)Q; +(O,p,)
donde se 'a tenido en cuenta (ue:
~ ~
Q%234 = Q,Q2Q3Q4 = ()%24,0,0,S%24)
~ ~
Q%23 = Q,Q2Q3 = ()%2 ,0,0,S%2)
Q%2 = Q,Q2 = ()%2 ,0,0,*%2)
y (ue:
+esarroando os productos de cuaternios de a e!presi,n #4-&4$ se tiene:
Q%234(0,a4)Q;234 =Q%234(0,a4x ,a4y ,a4Z)Q;234 =
= (.* %24a4/% ) %24a4!. * %24a4y, ) %24a4y. * %24a4!% ) %24a4/) Q; 234=
= (O,)&&2244 a4x - *&&2244 a4y , e &&2244 a4y - *&&2244 a4x ,a4z)
Q&23(O,p 4)Q;23 + Q%2 (0,p3 )Q;2 = Q&2(O,p 4 + P 3)Q;2 = (O,&3)&%22%&3*&&22,.(3)
Q0 (0,P2)Q; = (0,&2)&, ,&2*%& ,O)
#4-&3$
#4-&4$
#4-&*$
#4-&1$
#4-&2$
Cinemtica del robot 107
Asimismo, segn [4.9] :
(O,p]) =(0,0,0,1]) [4. 18]
con lo que finalmente resulta:
(O, ao) = (0,a4x C]]44 ! a4y "1l44 +1#C]] +1C$$ ,
a4y C]]44 ! a4x "]]44 +1#"]] +1"]] ,a4z - q3 +1])
[4.19]
%n cuanto a la relaci&n entre los cuatemios que 'efinen la orientaci&n 'e un o()eto en los sistemas
*"o+ y *"4+ se ten'r,:
[4.-]
.as e/0resiones [4.19] y [4.-] 0ermiten conocer la 0osici&n ao y orientaci&n 1o 'e un o()eto en el
sistema *"o+ conoci'as 2stas en el sistema *"4+.
"i, en 0articular, este o()eto est, 0osiciona'o y orienta'o en el e/tremo 'el ro(ot, se ten'r, que:
a, = (0,0,0)
14 = (1,0,0,0)
[4.1]
con lo que:
[4.]
lo que in'ica que el e/tremo 'el ro(ot referi'o al sistema 'e su (ase *"o+, est, 0osiciona'o en:
x =ao x =1 3cos(q] +q2) +1 2cosq]
y =aOy =1#sen(q] +q2) +1senq]
z=aoz =1] !q#
[4.#]
y est, gira'o res0ecto al sistema 'e la (ase un ,ngulo q +q2 +qs segn la rotaci&n en tomo al e)e 3:
1ot( 3, q] +q +q 4 )
[4.4]
108 Fundamentos de robtica
Las expresiones [4.23] Y[4.24] permiten conocer la localizacin del extremo del robot referidas al
sistema de la base en funcin de las coordenadas articulares (qJ, q2, q3, q4), correspondiendo por lo
tanto a la solucin del problema cinemtico directo.
4.2. CINEMTICA INVERSA
El objetivo del problema cinemtico inverso consiste en encontrar los valores ue deben adoptar las
coordenadas articulares del robot ! [q, q2, ... ,qnf para ue su extremo se posicione " oriente se#$n
una determinadalocalizacinespacial.
%s& como es posible abordar el problema cinemtico directo de una manera sistemtica a partir de la
utilizacin de matrices de transformacin 'omo#(neas) e independientemente de la confi#uracin del
robot) no ocurre lo mismo con el problema cinemtico inverso) siendo el procedimientode obtencin de
las ecuacionesfuertemente dependiente de la confi#uracin del robot.
*e 'an desarrolladoal#unos procedimientos #en(ricos susceptibles de ser pro#ramados [GOLDENBERG-
+,]) de modo ue un computador pueda) a partir del conocimiento de la cinemtica del robot -con sus
parmetros de .enavit/0artenber#) por ejemplo1 obtener la n/upla de valores articulares ue posicionan
" orientan su extremo. El inconveniente de estos procedimientos es ue se trata de m(todos num(ricos
iterativos) cu"a velocidadde conver#enciae incluso su conver#encia en s& no est siempre #arantizada.
% la 'ora de resolver el problema cinemtico inverso es muc'o ms adecuado encontrar una solucin
cerrada. Esto es) encontrar una relacin matemtica expl&cita de la forma2
qk ! fk(x,y,z,a,~,y)
3 ! L..n -4.L1
[4.2,]
Este tipo de solucinpresenta) entre otras) las si#uientes ventajas2
5. En muc'as aplicaciones) el problema cinemtico inverso 'a de resolverse en tiempo real -por
ejemplo) en el se#uimiento de una determinada tra"ectoria1. 6na solucin de tipo iterativo no
#arantiza tener la solucin en el momento adecuado.
2. %l contrario de lo ue ocurr&a en el problema cinemtico directo) con cierta frecuencia la solu7
cin del problema cinemtico inverso no es $nica8 existiendo diferentes n/uplas [q, ... , qnf ue
posicionan " orientan el extremo del robot del mismo modo. En estos casos una solucin cerra7
da permite incluir determinadas re#las o restricciones ue ase#uren ue la solucin obtenida sea
la ms adecuada de entre las posibles -por ejemplo) l&mites en los recorridos articulares1.
9o obstante) a pesar de las dificultades comentadas) la ma"or parte de los robots poseen cinemticas
relativamente simples ue facilitan en cierta medida la resolucin de su problema cinemtico inverso.
:or ejemplo) si se consideran slo los tres primeros #rados de libertad de muc'os robots) (stos tienen una
;
j
estructura planar, esto es, los tres primeros elementos quedan contenidos en un plano. Esta circunstancia
facilita la resolucin del problema. Asimismo, en muchos robots se da la circunstancia de que los tres
grados de. libertad ltimos, dedicados fundamentalmente a orientar el extremo del robot, corresponden
a giros sobre ejes que se cortan en un punto. De nuevo esta situacin facilita el clculo de la n-upla
q! , ... ,qn"# correspondiente a la posicin y orientacin deseadas. $or lo tanto, para los casos citados
y otros, es posible establecer ciertas pautas generales que permitan plantear y resolver el problema
cinemtico inverso de una manera sistemtica.
%os m&todos geom&tricos permiten obtener normalmente los valores de las primeras variables arti'
culares, que son las que consiguen posicionar el robot (prescindiendo de la orientacin de su extre'
mo). $ara ello utili*an relaciones trigonom&tricas y geom&tricas sobre los elementos del robot. +e
suele recurrir a la resolucin de tringulos formados por los elementos y articulaciones del robot.
,omo alternativa para resolver el mismo problema se puede recurrir a manipular directamente las
ecuaciones correspondientes al problema cinemtico directo. Es decir, puesto que &ste establece la
relacin-
Cinemtica del robot 109
[ ~
o a
../0"
o o
Figura 4.7. 1obotarticular.
110 Fundamentos de robtica
donde los elementos tijson funcin de las coordenadas articulares [q , ... , qn]T , es posible pensar que
mediante ciertas combinaciones de las 12 ecuaciones planteadas en [4.26] se puedan despejar las n
variablesarticulares q i en funcin de las componentes de los vectores n, 0, a y p.
Por ltimo, si se consideran robots con capacidad de posicionar y orientar su etremo en el espa!
cio, esto es, robots con 6 "#$, el m%todo de desacoplamiento cinem&tico permite, para determinados
tipos de robots, resolver los primeros 'rados de libertad, dedicados al posicionamiento, de manera
independiente a la resolucin de los ltimos 'rados de libertad, dedicados a la orientacin. (ada uno
de estos dos problemas m&s simples podr& ser tratado y resuelto por cualquier procedimiento.
4.2.1. Resolucin del problema cinemtico inverso por mtodos
geomtricos
(omo se )a indicado,este procedimiento es adecuado para robots de pocos 'rados de libertad o para el
caso de que se consideren slo los primeros 'rados de libertad,dedicados a posicionar el etremo.
*l procedimiento en s+ se basa en encontrar suficiente nmero de relaciones 'eom%tricas en las que
intervendr&n las coordenadas del etremo del robot, sus coordenadas articulares y las dimensiones
f+sicas de sus elementos.
Para mostrar el procedimiento a se'uir se va a aplicar el m%todo a la resolucin del problema ci!
nem&tico inverso de un robot con , "#$ de rotacin -estructura t+pica articular.. $a /i'ura 4.0
muestra la confi'uracin del robot. *l dato de partida son la coordenadas (Px, Pv - pz ) referidas a {So}
en las que se quiere posicionar su etremo.
(omo se ve, este robot posee una estructura planar, quedando este plano definido por el &n'ulo de
la primera variable articular q.
*l valor de q se obtiene inmediatamente como1
[4.20]
(onsiderando a)ora nicamente los elementos 2 y , que est&n situados en un plano -/i'ura 4.23a.,
y utili4ando el teorema del coseno, se tendr&1
r2 =p~5P6
r2 5 p7 =li5 17 5 2 1 21 3coSQ3
2 2 2 12 12
P5P85P93 23 ,
coSQ3 = 2121,
} ~
[4.22]
Cinemtica del robot 111
I l r ]
! : . !. . . I . . . .,
: . !
!
I
1
!
Esta expresin permite obtener q3 en funcin del vector de posicin del extremo p. No obstante, y
por motivos de ventajas computacionales, es ms conveniente utiliar la expresin de la arcotan!ente
en lu!ar del arcoseno.
"uesto #ue
se tendr #ue
$%. &'(
$%. )*(
+omo se ve, existen & posibles soluciones para q3 se!,n se tome el si!no positivo o el si!no ne!a-
tivo en la ra.. /stas corresponden a las confi!uraciones de codo arriba 01i!ura %. 23a4 y codo abajo
0ver 1i!ura %. 23b4 del robot.
a4 +odo abajo
b4 +odo arriba
Figura 4.8. El ementos 2 y 3 del r obot de l a Figur a 4. 7 contenidos en un pl ano y en
a) configur acin codo abao y b) configur acin codo ar r iba.
112 Fundamentos de robtica
El clculo de q2 se hace a partir de la diferencia entre ~ y IX:
[4.31]
Siendo:
~ = arctg(~) = arctg( ~ ~z ?
r + p- +p-
- x y
[4.3!]
"uego# final$ente
% [4.33]
&e nue'o los dos posi(les 'alores seg)n la elecci*n del signo dan lugar a dos 'alores diferentes de
q2 correspondientes a las configuraciones codo arri(a y a(a+o.
"as e,presiones [4.!-]# [4.3.] y [4.33] resuel'en el pro(le$a cine$tico in'erso para el ro(ot de 3
/&"considerado.
4.2.2. Resolucin del problema cinemtico inverso a partir de la matriz de
transformacin homognea
En principio es posi(le tratar de o(tener el $odelo cine$tico in'erso de un ro(ot a partir del
conoci$ientode su $odelo directo. Es decir# suponiendo conocidas las relaciones 0ue e,presan el 'alor
de la posici*ny orientaci*n del e,tre$o del ro(ot en funci*n de sus coordenadas articulares# o(tener por
$anipulaci*nde a0u1llas las relaciones in'ersas.
Sin e$(argo# en la prctica esta tarea no es tri'ial siendo en $uchas ocasiones tan co$ple+a 0ue
o(liga a desecharla. 2de$s# puesto 0ue el pro(le$a cine$tico directo# resuelto a tra'1s de la e,pre3
si*n [4.!4] contiene en el caso de un ro(ot de 4 /&" 1! ecuaciones# y se (uscan s*lo 4 relaciones
(una por cada grado de li(ertad)# e,istirn necesaria$ente ciertas dependencias entre las 1! e,presio3
nes de partida (resultado de la condici*n de ortonor$alidad de los 'ectores n, o y a) con lo cual la
elecci*n de 0u1 ecuaciones de [4.!4] escoger de(e hacerse con su$o cuidado.
Se 'a a aplicar este procedi$iento al ro(ot de 3 /&" de configuraci*n esf1rica (! giros y un des3
plaza$iento) $ostrado en la 5igura 4.6. El ro(ot 0ueda sie$pre contenido en un plano deter$inado
por el ngulo q.
Cinemtica del robot 113
Figura 4.9. Robot polar de 3 GOL.
El primer paso a dar para resolver el problema cinemtica inverso es obtener la expresin [4.26]
correspondiente a este robot. Es decir, obtener la matriz T que relaciona el sistema de referencia { S o }
asociado a la base con el sistema de referencia { S 3 } asociado a su extremo. a !i"ura 4.#$ representa
la asi"nacin de sistemas de referencia se"%n los criterios de &enavit'(artenber", con el robot situado
en su posicin de partida (q, ) q2 ) *+, y la Tabla 4., muestra los valores de los parmetros de &ena-
vit'(artenber".
. partir de /stos es inmediato obtener las matrices . y la matriz T.
0, * S , * 02 * - S * 1 * * *
2
S , * -c, *
S 2
*
c.
* * # * *
D A -
' A 2 =
2 A 3 =
,-
* 1 * t, * -1 * * * * 1
q 3
* * * 1 O * * 1 * * * 1
[4.,4]
C'C2
-S, -CS2 *
C'C2
- S -C,S2 - q 3 C1S2
#
D A 2 )
S,c2 c#
-S1S2
*
T = o A 3 =
S1C2
0, -S1S2 - q 3 S1S2
S 2
* c2 t,
S 2
* c2
q3C2+l1
* * * 1 * * * #
114 Fundamentos de robtica
Obtenida la expresin de T en funcin de las coordenadas articulares (q , q, q3), Ysupuesta una
localizacin de destino para el extremo del robot definida por los vectores n, 0, a y pse podra inten
tar manipular directamente las 12 ecuaciones resultantes de T a fin de despejar q, q2, Y q3 en funcin
de n, 0, a y p.
Tabla 4.3. Parmetros !" del robot de la #i$ura %.&.
'rticulacin e d a
a
(
)
*
o
O
O
&0
!&0
O
+in embar$o, este procedimiento directo es complicado, apareciendo ecuaciones trascendentes. ,n
lu$ar de ello, suele ser ms adecuado aplicar el si$uiente procedimiento-
Puesto .ue T / o'0 (') )'*se tendr .ue-
z
Figura 4.10. Asignacin de sistemas de referencia del robot polar de la Figura 4.9.
" " I R " ,
: 1
Cinemtica del robot 115
[4.35]
Puesto que T =[~ ~ ~ ~] es conocida, los miembros a la izquierda en las expresiones
[4.35] son funcin de las variables articulares (ql , ... , q!mientras que los miembros de la derec"a lo
son de las variables articulares (qk+l , .. , , qn)'
#e este modo, de la primera de las expresiones de [4.35] se tendr$ ql aislado del resto de las varia%
bles articulares & tal vez ser$ posible obtener su valor sin la comple'idad que se tendr(a abordando
directamente la manipulacin de la expresin [4.)*]. + su vez, una vez obtenida ql , la se,unda expre%
sin de [4.35] permitir$ tener el valor de q2 aislado respecto de q3. Por -ltimo, conocidos ql y q2 se
podr$ obtener qs de la expresin [4.)*] sin excesiva dificultad.
Para poder aplicar este procedimiento, es necesario en primer lu,ar obtener las inversas de las ma%
trices, -I A..sto es sencillo si se considera que la inversa de una matriz de transformacin "omo,/nea
viene dada por [3.44]:
-1
0n1p
1 )x
x
a x
Px 1 )x 1 )&
n z
n y 0 y a y
Py
x
0 y Oz
021p
1 )z
z
a z
Pz
a x
a y
a z
0a1p
2 2 2 1 2 2 2 1
3ue,o se tiene que:
e l
o
S I
o
-1
e l S I
o o
S I
o
- e l
o o o 1 -11
o A -1 _
I -
o 1 o 1 1
S I - e l
o o
o o o 1 o o o 1
e 2 o
- S 2
o -1
e 2
S 2
o o
S 2
o e 2 o o o -1 2
l A -1_
2 -
o -1 o o
- S 2
e 2 o o
o 2 o 1 o o o
1 o o o
-1
1 o o o
o o o o 1 o o
2 A -1_
4 3 5
2 o 1
q3
o o 1 -q3
o o o 1 2 o o 1
[4.3*]
[4.36]
116 Fundamentos de robtica
Por lo tanto, utilizando la primera de las ecuaciones de [4.35] se tiene que:
e S O O
1 2 x
x
ax
P x
( 0 AtO 3!A" "A3 !
O O 1 #$
1 2 y ay ay
P y
S #e O O
1 2 z
z
az
P z
O O O 1 O O O 1
e" O
#S" O 1 O O O e" O
#S" -S2q3
[4.3%]
S"
O e" O O 1 O O
S"
O e"
e2q3
O -1 O O O O 1
q3
O -1 O O
O O O 1 O O O 1 O O O 1
&e las $" relaciones esta'lecidas en la ecuaci(n [4.3%] interesan aquellas que e)presan q en *un+
ci(n de constantes ( , no de qi , q3 ). As- por e.emplo, tomando el elemento ( 3,4/ se tiene:
S P X - C p y =O =>
tan( q, ) =(;:) =>
q, =arcta0 1 : J [4.32]
3tilizando a4ora la se5unda de las ecuaciones de [4.35] se tendr6:
e *( o * "
A" A T= A3 !
e"
S"
O O e S O O
1 2 x
x
ax
P x
1 O O O
O O -1 O O O 1 #$
1 2 y 0y ay
P y
O O O
!
! [4.40 ]
#S" e" O O S #e O O
1 2 z O z
az
P z
O O 1
q3
O O O 1 O O O O O O 1 O O O 1
7"7 c.s,
S" #$S"
1 2 x
x
ax
P x
$ O O O
#S8 7 O O
lly 0y ay
P y
O 1 O O
!
!
#S"7 #S"S 7" #e"$
1 2 z
z
az
P z
O O 1
q3
O O O 1 O O O 1 O O O
Cinemtica del robot 117
Tomando el elemento (1,4) se tiene:
C2Cpx +C2Spy +S2Pz -1S2 =0 ~
C2(CPX +SPy)+S2(PZ -1)=0 ~
[4.41]
y considerandoque or [4.!"] :
SPX-Cpy=O ~
(SPX-C pyr =S p+C~ p~-2SC PxPy =0 ~
(l-#n$%(l-Sn~ =2S#PxPy ~
#2 2 S2 2 2S # 2 2
Px % 1 Py % 1 PxPy = Px %&y
[4.42]
se tiene 'inalmente:
[4.4!]
&or (ltimo, tomando de [4.40] el elemento (!,4) se tiene:
-S2Cpx -S2SPy +C2PZ -#2l =!"
C2(PZ-l)-S2(CPX+Spy)=#$ ~
[4.44]
)as e*resiones [4.!"], [4.4!] y [4.44] corresonden a la soluci+n del ro,lema cinem-tico in.erso
del ro,ot considerado. / continuaci+n se reroducen estas e*resiones.
-----------------------=0---
118 Fundamentos de robtica
q, =a r c t a n ( ; : J
~p; + p~
q7 = a r et a n
- 11 - pz
q3 = e2 (Pz - 1 1 ) - S2 ~ P; +P~
A los mismos r esult a dos se podr a ha ber llega do media n t e c on sider a c ion es geomt r ic a s.
4.2.3. Desacoplo cinemtico
[4.45
!os pr oc edimien t os "ist os en los a pa r t a dos a n t er ior es per mit en obt en er los "a lor es de la s # pr imer a s
"a r ia bles a r t ic ula r es del r obot $ a %uella s %ue posic ion a n su e&t r emo en un a s c oor den a da s (Px , Ps , pz)
det er min a da s$ a un %ue pueden ser igua lmen t e ut ili'a da s pa r a la obt en c i(n de la s ) a c ost a de un a ma *or
c omple+ida d.
Ahor a bien $ c omo es sa bido$ en gen er a l n o ba st a c on posic ion a r el e&t r emo del r obot en un pun t o
del espa c io$ sin o %ue c a si siempr e es pr ec iso t a mbin c on seguir %ue la her r a mien t a %ue a %ul por t a se
or ien t e de un a ma n er a det er min a da . ,a r a ello$ los r obot s c uen t a n c on ot r os t r es gr a dos de liber t a d
a dic ion a les$ sit ua dos a l -in a l de la c a den a c in em.t ic a * c u*os e+es$ gen er a lmen t e$ se c or t a n en un
pun t o$ %ue in -or ma lmen t e se den omin a mueca del robot. /i bien la "a r ia c i(n de est os t r es 0lt imos
gr a dos de liber t a d or igin a un c a mbio en la posic i(n -in a l del e&t r emo r ea l del r obot $ su "er da der o ob1
+et i"o es poder or ien t a r la her r a mien t a del r obot libr emen t e en el espa c io.
2l mt odo de desa c oplo c in em.t ic a sa c a pa r t ido de est e hec ho$ sepa r a n do a mbos pr oblema s: posi1
c i(n * or ien t a c i(n . ,a r a ello$ da da un a posic i(n * or ien t a c i(n -in a l desea da s$ est a blec e la s c oor den a 1
da s del pun t o de c or t e de los # 0lt imos e+es imuiieca del robot) c a lc ul.n dose los "a lor es de la s t r es
pr imer a s "a r ia bles a r t ic ula r es (QI,Q2,q3) %ue c on siguen posic ion a r est e pun t o. A c on t in ua c i(n $ a pa r t ir
de los da t os de or ien t a c i(n * de los *a c a lc ula dos (QI,Q2,Q3) obt ien e los "a lor es del r est o de la s "a r ia 1
bles a r t ic ula r es.
Tabla 4.4. Parmetros D-H del robot de la Figura 4.11.
Ar t ic ula c i(n e d a e&
1
e l
l o - 34
5 e 2 o
h
o
# e 3 o o 34
4 e 4
h
o - 34
5
e s
o o 34
6 e 6 1 4 o o
Cinemtica del robot 119
Pm =0005
Pr =0006
[4.46]
Figura 4.11. Cinemtica del robot IRB2400, cuya inversa se puede desacoplar.
En la Figura 4.11 se representa un robot que rene las citadas caractersticas, con indicacin de los
sisteas de coordenadas asociados segn el procediiento de !ena"it#$arteberg, cu%os par&etros
se pueden obser"ar en la 'abla 4.4.
El punto central de la u(eca del robot corresponde al origen del sistea )*5+, 05. Por su parte, el
punto -inal del robot ser& el origen del sistea { S 6 ! 06 . En lo que sigue se utili.ar&n los "ectores,
120 Fundamentos de robtica
que van desde el origen del sistema asociado a la base del robot {So} hasta los puntos centro de la
mueca y fin del robot, respectivamente.
Puesto que la direccin del eje Z6 debe coincidir con la de z, y la distancia entre Os Y6 medida a
lo largo de Zs es precisamente d, =: ! " , se tendr# que$
%" ." &'
estando todos los vectores referidos a las coordenadas del sistema {So}.
(n la e)presin %" ." 6' Pr son las coordenadas del punto donde se pretende que se posicione el ro*
bot e)presadas en {So}. Por lo tanto
%" ." +'
(l vector director Z6 es el vector a correspondiente a la orientacin deseada Z6 =: [ax , ay, azr y ! " es
un par#metro asociado con el robot. Por lo tanto, las coordenadas del punto central de la mueca (Pmx ,
p rny , Prnz) son f#cilmente obtenibles.
,al y como se mostr en el ep-grafe " .. es posible, mediante un m/todo geom/trico, por ejemplo,
calcular los valores de (qJ, q2, q3) que consiguen posicionar el robot en el prn deseado.
0ueda ahora obtener los valores de qs, Qs, YQ6 que consiguen la orientacin deseada. Para ello, de*
nominando o 16 a la submatriz de rotacin de o ,6 se tendr#$
%" ." 2'
donde o 13 es conocida por ser la orientacin deseada del e)tremo del robot, y o 14 definida por$
R A lA 2A
45 6 . 4
%" . 7'
tambi/n lo ser# a partir de los valores ya obtenidos de qs, q2, Yq3. Por lo tanto$
4 %' 8 o 9 5! o 8 : 9 , %
R6 ; [ij ; R4 R6 ; R n o a l
%" .7! '
tendr# sus componentes num/ricas conocidas.
Por otra parte, 416 corresponde con la submatriz 8 4)49 de rotacin de la matriz de transformacin
homog/nea 4,6 que relaciona el sistema <=4> con el <=6>. Por lo tanto$
%" . 7.'
donde i-IRes la submatriz de rotacin de la matriz de ?enavit5@artemberg i-IAi , cuyos valores son$
o
o
-1
Luego se tiene que:
Cinemtica del robot 121
[4.53]
r
C4CSC6 -S4S6 -C4CSS6 -S4C6
3R6 = S 4 CS C6 +C4S6 - S4CSS6 +C4C6
-SsC6 S S S 6
donde rjj sern por [4.51]valores nu!ri"os "ono"idos:
[4.54]
-C4 CS S 6 -S4C6
- S4CSS6 +C4C6
S S S 6
[4.55]
#e las nueve rela"iones e$presadas en [4.55]se pueden toar las "orrespondientes a r13%r&3%r33%r31
y r3&:
r]3 =C4SS r&3 =-S4CS
r31' -SsC( r3& ' SsS(
[4.56]
#el "onjunto de e"ua"iones [4.56] es inediato o)tener los valores de los paretros arti"ulares
*se re"oienda "onvertir todas las +un"iones trigono!tri"as inversas en su ar"otangente% por ser !sta
"oputa"ionalente s ro)usta,:
q4 =aresen* -&3.
33
qS ' areos* r33, [4.5/]
*
r30 .
q( ' aretan ---
r 31
122 Fundamentos de robtica
Esta expresin, junto con las [4.27], [4.30] Y[4.33], Yteniendo en cuenta que las posiciones de ce
ro son distintas, constituyen la solucin completa del prolema cinem!tico in"erso del root articular
de la #i$ura 4.%%.
4.3. MATRIZ JACOBIANA
El modelado cinem!tico de un root usca las relaciones entre las "ariales articulares y la posicin
&expresada normalmente en 'orma de coordenadas cartesianas( y orientacin del extremo del root. En
esta relacin no se tienen en cuenta las 'uer)as o pares que act*an sore el root &actuadores, car$as,
'ricciones, etc.( y que pueden ori$inar el mo"imiento del mismo. +in emar$o, s, que dee permitir
conocer, adem!s de la relacin entre las coordenadas articulares y del extremo, la relacin entre sus
respecti"as deri"adas. -+., el sistema de control del root dee estalecer qu/ "elocidades dee imprimir
a cada articulacin &a tra"/s de sus respecti"os actuadores( para conse$uir que el extremo desarrolle una
trayectoria temporal concreta, por ejemplo, una l,nea recta a "elocidad constante.
0ara este y otros 'ines, es de $ran utilidad disponer de la relacin entre las "elocidades de las coor
denadas articulares y las de la posicin y orientacin del extremo del root. 1a relacin entre amos
"ectores de "elocidad se otiene a tra"/s de la denominada matriz jacobiana &#i$ura 4.%2(.
1a matri) 2 acoiana directa permite conocer las "elocidades del extremo del root a partir de los
"alores de las "elocidades de cada articulacin. 0or su parte, la matri) 2acoiana in"ersa permitir!
conocer las "elocidades articulares necesarias para otener unas "elocidades determinadas en el ex
tremo del root.
4.3.1. Relaciones diferenciales
El m/todo m!s directo para otener la relacin entre "elocidades articulares y del extremo del root
consiste en di'erenciar las ecuaciones correspondientes al modelo cinem!tico directo.
-+., supn$anse conocidas las ecuaciones que resuel"en el prolema cinem!tico directo de un ro
ot de n 3415
2acoiana directa
6elocidad
j
.... 6elocidades ~
i
, . .
del extremo
\~
de las
~
articulaciones
' .
del root
~
(q1 ,q1 ,,qn) "
(x,y,i,a,(3, y)
2acoiana in"ersa
78r 7 ,9 : 5,; 87 <<8E8(%<9 <8888889 2828888=8,88 ~. t.
i!"ra 4.1#. Matriz jacobiana directa e inversa.
1
x = f, (q" ... ,qn)
a=fa(q,, .. ,qn)
y = fy(q,, .. ,qn)
~ = fp(q" .. ,qn)
Cinemtica del robot 123
z=fz(q,, .. ,qn)
' Y =fy(q" .. ,qn)
[4.58]
Si se derivan con respecto al tiempo ambos miembros del conjunto de ecuaciones anteriores, se
tendr
n df
. ~ !.
y = .4,,-q
, dq
. ~ dfp.
~ = .4,,-q
, dq
oe"presado en forma matricial
n df
z = #$%&'
' dq
n df
. ~ !.
' Y =.4,,-q
dq
[4.5(]
)a matri* Jse denomina matri* +acobiana.
,uesto &ue el valor num-rico de cada uno de los elementos . p&] de la +acobiana depender de los
valores instantneos de las coordenadas articulares Si, el valor de la +acobiana ser diferente en cada
uno de los puntos del espacio articular.
i
q,
df " df x
y
dq, dqn
*
J.
con
J [4./0]
a
~
df y ar,
' Y
( n
dq, dqn
Ejemplo 4.3.
Se va a obtener la matri* +acobiana del robot S1232 de la 4i5ura 4./. 6l problema cinemtica di7
recto viene determinado por las ecuaciones
x =1 3C,z +lz C,
y =1 3S ,z 8 I Z S
* =1 , -qJ
,or lo tanto se tendr
124 Fundamentos de robtica
Si el robot se encuentra en un momento determinado en la posicin dada por
7t
q
--rad
J - 6 .
7t
q - -rad
2 - 4 .
q3 =0,75m.
movindose a una velocidad articular de valor instantneo:
7t
q
. - -rad s
J - 2 .
7t
q? =-rad/s. a, =lm/s
- 2
y con h! h! " m, la velocidad de su e#tremo ser:
l
$ % l-& ,465
ji = 1,124
Z
-0,'65
0.25(
% l7t 2% l- ).("%
7t 2 = 2,"7
-1 1 -1
Si, mantenindose la velocidad articular, el robot se encontrase en la posicin *J ! rr) rad.,
q2=rr/2 rad., la velocidad del e#tremo ser+a:
[
X ] r-",)6
~ =l-0,66
-0,5
-0,(66
4.3.2. Jacobiana inversa
-el mismo modo *ue se .a obtenido la relacin directa *ue permite obtener las velocidades del e#tremo
a partir de las velocidades articulares, puede obtenerse la relacin inversa *ue permite calcular las
velocidades articulares partiendo de las del e#tremo. /n la obtencin de la relacin inversa pueden
emplearse di0erentes procedimientos.
"
, 1 ,
Cinemtica del robot 125
" " " I ~ . " . " ,
r' . .
: !
\
j i
En primerlugar, supuesta conocida la relacin directa, dada porla matriz Jacobiana [4. !", se pue#
de obtenerla relacin in$ersa in$irtiendo simblicamente la matriz
i J I
i
j i
=J-I
Z
e%
[4. &"
f 3
i J l ! r
Esta alternati$a, de planteamiento sencillo, es en la pr'ctica de di()cil realizacin. *uponiendo +ue
la matriz J sea cuadrada, la in$ersin simblica de una matriz , , cu-os elementos son (unciones
trigonom.tricas, es de gran comple/idad, siendo este procedimiento in$iable.
0omo segunda alternati$a puede plantearse la e$aluacin num.rica de la matriz J para una con(i#
guracin (q) concreta del robot, e in$irtiendo num.ricamente esta matriz encontrarla relacin in$ersa
$'lida para esa con(iguracin. En este caso 1a- +ue considerar, en primerlugar, +ue el $alornum.rico
de la Jacobiana $a cambiando a medida +ue el robot se mue$e -, porlo tanto, la Jacobiana in$ersa 1a
de serrecalculada constantemente. 2dem's, pueden e,istirn3uplas (q, ...,qn) para las cuales la matriz
Jacobiana J no sea in$ertible porsersu determinante, denominado Jacobiano, nulo. Estas con(igura#
ciones del robot en las +ue el Jacobiano se anula se denominan con(iguraciones singulares - ser'n
tratadas m's adelante. 4na tercera di(icultad +ue puede surgir con este - otros procedimientos de
computo de la matriz Jacobiana in$ersa, se deri$a de la circunstancia de +ue la matriz J no sea cua#
drada. Esto ocurre cuando el n5mero de grados de libertad del robot no coincide con la dimensin del
espacio de la tarea 6normalmente seis7. En el caso de +ue el n5mero de grados de libertad sea in(erior,
la matriz Jacobiana tendr' m's (ilas +ue columnas. Esto +uiere decir+ue el mo$imiento del robot est'
sometido a ciertas restricciones 6por e/emplo, no se puede alcanzarcual+uier orientacin7. 8)pica#
mente esto ocurre en los casos en los +ue esta restriccin no tiene importancia, como en robots dedi#
cados a tareas como soldadura porarco o desbarbado, en las +ue la orientacin de la 1erramienta en
cuanto a su giro en tomo al $ectora es indi(erente, porlo +ue puede sereliminado este grado de li#
bertad del espacio de la tarea, +uedando una nue$a matriz Jacobiana cuadrada.
En los casos en +ue el robot sea redundante 6m's de 9:; o m's columnas +ue (ilas en la matriz
Jacobiana7 e,istir'n grados de libertad articulares innecesarios, es decir, +ue no ser' preciso mo$er
para alcanzarlas nue$as posiciones - $elocidades del e,tremo re+ueridas. <orello, la correspondiente
$elocidad articularpodr' sertomada como cero, o si (uera 5til, como un $alorconstante.
En general, en el caso de +ue la Jacobiana no sea cuadrada podr' serusado alg5n tipo de matriz
pseudoin$ersa, como pore/emplo (J JT r' .
;a tercera alternati$a para obtenerla matriz Jacobiana in$ersa es repetirel procedimiento seguido
para la obtencin de la Jacobiana directa, pero a1ora partiendo del modelo cinem'tica in$erso. Esto
es, conocida la relacin:
126 Fundamentos de robtica
ql=fl(x, y,z,a,~, y)
[4.62]
q" =f" (x, y,z,a,~, y)
La matriz jacobiana inversa se obtendr por diferenciacin con respecto del tiempo de ambos
miembros de la igualdad:
i 1
i
J-I
q"
!
con:
d f l
d x
J-I
ar"
d x
[4.6#]
[4.64]
$omo en el caso de la primera alternativa" este m%todo puede ser algebraicamente complicado.
&ada la importancia 'ue paca el control del movimiento del robot tiene la (acobiana" se )an desarro*
llado otros procedimientos num%ricos para el clculo rpido de la (acobiana.
4.3.3. Configuraciones singulares
Se denominanconfiguraciones singulares de un robot a a'uellas en las 'ue el determinante de su matriz
(acobiana +(acobiano, se anula. -or esta circunstancia" en las configuraciones singulares no e.iste
(acobiana inversa.
/l anularse el (acobiano" un incremento infinitesimal de las coordenadas cartesianas supondr0a un
incremento infinito de las coordenadas articulares" lo 'ue en la prctica se traduce en 'ue en las inme*
diaciones de las configuraciones singulares" el pretender 'ue el e.tremo del robot se mueva a veloci*
dad constante" obligar0a a movimientos de las articulaciones a velocidades inabordables por sus ac*
tuadores.
Cinemtica del robot 127
Por ello, en las inmediaciones de las configuraciones singulares se pierde alguno de los grados de
libertad del robot, siendo imposible que su extremo se mueva en una determinada direccin cartesia
na. Las diferentes configuraciones singulares del robot pueden ser clasificadas como:
Singularidades en los lmites del espacio de trabajo del robot. Se presentan cuando el extremo
del robot est en alg!n punto del lmite de trabajo interior o exterior. "n esta situacin resulta
obvio que el robot no podr despla#arse en las direcciones que lo alejan de este espacio de tra
bajo.
Singularidades en el interior del espacio de trabajo del robot. $curren dentro de la #ona de tra
bajo y se producen generalmente por el alineamiento de dos o ms ejes de las articulaciones del
robot.
Ejemplo 4.4.
Para el robot S%&'& del que se obtuvo la matri# (acobiana en el "jemplo ).*, se tiene que:
+ ,- ./*S01 +/1S02 -/*S01
J - /*C01 +/1C, 1*%31
O O
por lo que el (acobiano ser:
que se anula para:
lo que se cumple siempre que q2 4 $ o rr , pues entonces la igualdad anterior se verifica para cual
quier q,:
"sta situacin definida por q2 4 $ o /t corresponde a los puntos lmite del espacio de trabajo
del robot:
q2 4 $ : Lmite exterior del espacio de trabajo.
q2 4 /t: Lmite interior del espacio de trabajo.
---- -------+----
128 Fundamentos de robtica
Se debe prestar especial atencin a la localizacin de las configuraciones singulares del robot para
que sean tenidas en cuenta en su control, evitndose solicitar a los actuadores movimientos a veloci
dades inabordables o cambios bruscos de las mismas:
La Figura 4.1 muestra el resultado de intentar realizar con un robot tipo S!"#", una tra$ectoria
en l%nea recta a velocidad constante que pasa por una configuracin singular. &bs'rvese la brusca
variacin de la velocidad articular q que crece (asta valores inalcanzables en la prctica.
)ara evitar la aparicin de configuraciones singulares debe considerarse su e*istencia desde la
propia fase de dise+o mecnico, imponiendo restricciones al movimiento del robot o utilizando robots
redundantes ,lo que conlleva otro tipo de problemas-. Finalmente, el sistema de control debe detectar
$ tratar estas configuraciones evitando pasar precisamente por ellas.
. . P n
)o
q 2
300
240
180
120
60
t,
t n t
Figura 4. 13. Ejemplo de pun t o sin gular para un robot t ipo SCARA.
Cinemtica del robot 129
Un posible procedimiento para resolver la presencia de una singularidad interior al espacio de tra
bajo, en la que se pierde la utilidad de alguna articulacin (prdida de algn grado de libertad) sera el
siguiente:
1. denti!icar la articulacin correspondiente al grado de libertad perdido (causante de que el de
terminante se anule).
". #liminar la !ila de la $acobiana correspondiente al grado de libertad perdido y la columna co
rrespondiente a la articulacin causante.
%. &on la nueva $acobiana reducida (rango n'l) obtener las velocidades de todas las articulacio
nes, a e(cepcin de la eliminada, necesarias para conseguir las velocidades cartesianas desea
das. )a velocidad de la articulacin eliminada se mantendr* a cero.
4.4. BIBLIOGRAFA
+,#-./0'112 $.,enavit y 34 5artenberg, 6. 7inematic -otation !or )o8er'9air :ec;anisms <ased
on :atrices6, Journal of Applied Mechanics, junio 1==1.
+>u'??2 7.4. >u el. al, 6&inem*tica del bra@o del robot6, en: Robtica. Control, deteccin, visin e
inteligencia, :cAra8'5ill, :adrid, 1=??.
+AB),#-<#3A'?12 .... Aoldenberg, b. <en;abib y 3A. >enton, 6. complete generali@ed solution to
t;e inverse Cinematics o! robots6, IEEE Journal of Robotics and Automation, 3.'1, 1, 1=?1.
+9.U)'?1239 9aul, Robot Manipulators : Mathematics, rogramming and Control, 0;e :0 9ress,
:assac;usetts, 1=?1.
caPtuloS
DINMICA DEL ROBOT
Djole el perro al hueso: si tu eres duro, yo tengo tiempo.
Refranero popular
La dinmicase ocupa de la relacinentre las fuerzas que actan sobreun cuerpo y el moimientoque en
!l se origina. "or lo tanto, el modelo dinmico de un robot tiene por objetioconocer la relacin entre el
moimientodel robot y las fuerzas implicadas en el mismo.
#sta relacin se obtiene mediante el denominado modelo dinmico, que relaciona matemtica$
mente:
%. La localizacin del robot definida por sus ariables articulares o por las coordenadas de locali$
zacin de su e&tremo, y sus deriadas: elocidad y aceleracin.
'. Las fuerzas y pares aplicados en las articulaciones (o en el e&tremo del robot).
*. Los parmetros dimensionales del robot, como longitud, masas e inercias de sus elementos.
La obtencin de este modelo para mecanismos de uno o dos grados de libertad no es e&cesia$
mente compleja, pero a medida que el nmero de grados de libertad aumenta, el planteamiento y ob$
tencin del modelo dinmico se complica enormemente. "or este motio no siempre es posible obte$
ner un modelo dinmico e&presado de una forma cerrada, esto es, mediante una serie de ecuaciones,
normalmente de tipo diferencial de '+ orden, cuya integracin permita conocer qu! moimiento surge
al aplicar unas fuerzas o qu! fuerzas hay que aplicar para obtener un moimiento determinado. #l
modelo dinmico debe ser resuelto entonces de manera iteratia mediante la utilizacin de un proce$
dimiento num!rico.
131
132 Fundamentos de robtica
El problema de la obtencin del modelo dinmico de un robot es, por lo tanto, uno de los aspectos
ms complejos de la robtica, lo que ha llevado a ser obviado en numerosas ocasiones. Sin embargo,
el modelo dinmico es imprescindible para conseguir los siguientes fines [SALTAE!"#$%&
'. Simulacin del movimiento del robot.
(. )ise*o + evaluacin de la estructura mecnica del robot.
,. )imensionamiento de los actuadores.
-. )ise*o + evaluacin del control dinmico del robot.
Este .ltimo fin es evidentemente de gran importancia, pues de la calidad del control dinmico del
robot depende la precisin + velocidad de sus movimientos. La gran complejidad +a comentada e/is0
tente en la obtencin del modelo dinmico del robot, ha motivado que se realicen ciertas simplifica0
ciones, de manera que as1 pueda ser utili2ado en el dise*o del controlador.
Es importante hacer notar que el modelo dinmico completo de un robot debe incluir no slo la di0
nmica de sus elementos 3barras o eslabones4 sino tambi5n la propia de sus sistemas de transmisin,
de los actuadores + sus equipos electrnicos de mando. Estos elementos incorporan al modelo dinmi0
co nuevas inercias, ro2amientos, saturaciones de los circuitos electrnicos, etc. aumentando a.n ms
su complejidad.
6or .ltimo, es preciso se*alar que si bien en la ma+or parte de las aplicaciones reales de la robti0
ca, las cargas e inercias manejadas no son suficientes como para originar deformaciones en los esla0
bones del robot, en determinadas ocasiones no ocurre as1, siendo preciso considerar al robot como un
conjunto de eslabones no r1gidos. Aplicaciones de este tipo pueden encontrarse en la robtica espacial
o en robots de grandes dimensiones, entre otras. 7n estudio del modelado de robots con estas caracte0
r1sticas puede encontrarse en [A8A9S"#:%.
Este cap1tulo va a presentar especial atencin a la obtencin del modelo dinmico del mecanismo
robot ms habitual, en el que se considera a 5ste como r1gido, reali2ndose posteriormente algunas
consideraciones sobre la dinmica de los actuadores ms habituales en robtica.
:.'. 8;)EL; )9!<89=; )E LA EST7=T7A 8E=<!9=A )E 7!
;>;T ?@9);
La obtencin del modelo dinmico de un mecanismo, + en particular de un robot, se basa
fundamentalmente en el planteamiento del equilibrio de fuer2as establecido en la segunda le+ de
!eAton, o su equivalentepara movimientosde rotacin, la denominada le+ de Euler&
[:. 1]
As1, en el caso simple de un robot monoarticular como el representado en la Bigura :.', el equili0
brio de fuer2as"pares dar1a como resultado la ecuacin&
Dinmica del robot 133
r ! [ 11
' , : 1
r . :
1
1
d2S 2"
' t = 1-2 +MgLcosS = ML S +MgLcosS
dt
[ 5. 2]
En donde se ha supuesto que toda a !asa se encuentr a concentr ada en e centr o de gr a"edad de
ee!ento# que no e$%ste r o&a!%ento aguno ' que no se !an%pua n%nguna car ga.
(ar a un par !otor 1:deter !%nado# a %ntegr ac%)n de a ecuac%)n [ 5. 2] dar *a ugar a a e$pr es%)n de
+,t- ' de sus der %"adas +,t- ' S,t-# con o que ser *a pos%.e conocer a e"ouc%)n de a coor denada
ar t%cuar de r o.ot ' de su "eoc%dad ' aceer ac%)n.
/e 0or !a %n"er sa# s% se pr etende que +,t- e"ouc%one seg1n una deter !%nada 0unc%)n de t%e!po#
sust%tu'endo en [ 5. 2] podr *a o.tener se e par 1: ,t-que ser *a necesar %o ap%car . S% e r o.ot tu"%ese que
e2er cer aguna 0uer &a en su e$tr e!o# 'a sea a !an%puar una car ga o# por e2e!po# r ea%&ar un pr oceso
so.r e aguna p%e&a# .astar *a con %ncu%r esta cond%c%)n en a ecuac%)n [ 5. 2] ' pr oceder de !%s!o
!odo.
Se t%ene as* que de pantea!%ento de equ%%.r %o de 0uer &as ' par es que %nter "%enen so.r e e r o.ot
se o.t%enen os deno!%nados !odeos d%n3!%cos d%r ecto e %n"er so:
4 Modeo d%n3!%co d%r ecto: e$pr esa a e"ouc%)n te!por a de as coor denadas ar t%cuar es de
r o.ot en 0unc%)n de as 0uer &as ' par es que %nter "%enen.
4 Modeo d%n3!%co %n"er so: e$pr esa as 0uer &as ' par es que %nter "%enen en 0unc%)n de a e"ou5
c%)n de as coor denadas ar t%cuar es ' sus der %"adas.
E pantea!%ento de equ%%.r %o de 0uer &as en un r o.ot r ea de 5 o 6 gr ados de %.er tad# es !ucho
!3s co!p%cado que e e2e!po de a 7%gur a 5. 1. /e.e tener se en cuenta que 2unto con as 0uer &as de
%ner c%a ' gr a"edad# apar ecen 0uer &as de 8or %o%s de.%das a !o"%!%ento r eat%"o e$%stente entr e os
d%"er sos ee!entos# as* co!o de 0uer &as centr *petas que dependen de a con0%gur ac%)n %nstant3nea de
!an%puador .
8o!o pantea!%ento ater nat%"o par a a o.tenc%)n de !odeo se puede usar a 0or !uac%)n La5
gr ang%ana# .asada en cons%der ac%ones ener g9t%cas. Este pantea!%ento es !3s s%ste!3t%co que e ante-
7%gur a 5. 1. Modelo de eslabn con masa concentrada.
1
1
134 Fundamentos de robtica
rior, y por lo tanto, facilita enormemente la formulacin de un modelo tan complejo como el de un
robot.
La formulacin Lagrangiana establece la ecuacin:
da-E a-E
------='t
dt aq aq
-E=l~-u
[5.!
con
q: coordenadas generali"adas #en este caso las articulares$.
1: %ector de fuer"as y pares aplicados en las q.
_jJ: &uncin Lagrangiana.
l~:energ'a cin(tica.
U: energ'a potencial.
En el caso del robot monoarticular de la &igura 5.1 se tendr'a:
1 . 1
k= -I )-
*
[5.+!
,dem-s:
u = .g/ = .gLsen) [5.5!
luego:
1 ? *
-E = 0 - u= - .L-) - .gLsen)
2
[5.1!
a-E
-=-.gLcos)
as
a-E .
-. =.e)
as
d a-E 23
--o =.L-)
dt as
[5.4!
y sustituyendoen [5.! se obtiene:
.ee 5 .gLcos) = 't [5. 6!
ecuacin 7ue coincide con la [5.*!.
Dinmica del robot 135
' 1
1 ,
Aunque, para el caso simple del ejemplo, la obtencin del modelo mediante la formulacin La
grangiana ha resultado ms tediosa que mediante la formulacin Newtoniana, la primera muestra sus
ventajas a medida que aumenta el nmero de grados de libertad.
La obtencin del modelo dinmico de un robot ha sido y es objeto de estudio e investigacin. Nu
merosos investigadores han desarrollado formulaciones alternativas, basadas fundamentalmente en la
mecnica Newtoniana y Lagrangiana, con el objeto de obtener modelos manejables por los sistemas
de clculo de una manera ms eficiente.
Algunos de estos planteamientos son los debidos a
! "ic#er$%&'( basado en la formulacin Lagrangiana.
! Lu$%&)* basado en la formulacin Newtoniana.
! Lee$%&)+.
"n estudio completo de estos y otros planteamientos puede encontrarse en ,-u$))., ,/A"L$)%. o
,01A23$)&. entre otros. Aqu4 se e5pondrn nicamente los resultados finales de estos planteamientos,
que e5presados en forma de algoritmo, permiten obtener el modelo dinmico del robot. 6n ambos
casos se aplica la metodolog4a a seguir sobre un robot de 7 grados de libertad.
(.7. 89:6N02;N <6L =8<6L8 <2N>=208 <6 "N 1898: =6<2AN:6
LA -81="LA02;N <6 LA31AN36$6"L61
"ic#er en %&'( ,"tc?61$'(. ,"20?61$'@. utiliA la representacin de <$B basada en las matrices de
transformacin homogCnea para formular el modelo dinmico de un robot mediante la ecuacin de
Lagrange.
6ste planteamiento utiliAa, por tanto, las matrices i-lAi que relacionan el sistema de coordenadas de
referencia del elemento i con el del elemento i$L De realiAan en este caso operaciones de producto y
suma innecesarias ErecuCrdese la informacin redundante contenida en las matrices A debido a la
ortonormalidad de la submatriA de rotacinF. De trata de un procedimiento ineficiente desde el punto
de vista computacional. /uede comprobarse que el algoritmo es de un orden de complejidad computa
cional 8EnG es decir, el nmero de operaciones a realiAar crece con la potencia @ del nmero de gra
dos de libertad. Din embargo, conduce a unas ecuaciones finales bien estructuradas donde aparecen de
manera clara los diversos pares y fuerAas que intervienen en el movimiento Einercia, 0oriolis, grave
dadF.
De presenta a continuacin al algoritmo a seguir para obtener el modelo dinmico del robot por el
procedimiento de Lagrange$6uler EL$6F.
136 Fundamentos de robtica
5.2.1. Algoritmo computacional para el modelado dinmico por
Lagrange- Euler
L-E 1. Asignar a cada eslabn un sistema de referencia de acuerdo a las normas de D-H.
L-E 2. Obtener las matrices de transformacin Aipara cada elemento i.
L-E 3. Obtener las matrices Uij definidas por:
aOA.
U..=--'
I aqj
!"er nota 1# $%.&'
L-E (. Obtener las matrices Uijkdefinidas por:
aUij
Uijk ) aqk
!"er nota 2# $%. 1*'
L-E %. Obtener las matrices de pseudoinercias Jipara cada elemento+ ,ue "ienen definidas por:
I X / dm
I x y dm
I -./.dm I -.dm
Ji =
I y x dm
I y / dm I 0./.dm I 0.dm
$%. 11'
I /.-.dm I /.0.dm
I /1dm I /.dm
f -.dm f 0dm f /.dm fdm
donde las integrales est2n+ e-tendidas al elemento i considerado+ 0 ( X i Y i /.# son las coordenadas del
diferencial de masa dm respecto al sistema de coordenadas del elemento.
L-E 3. Obtener la matri/ de inercias D ) $dij] cu0os elementos "ienen definidos por:
n
dij = I. 4ra/alf.l kjJkU~i)
5)!ma- i.j)
$%. 12'
con i+6 ) 1+2+...+n
n: n7mero de grados de libertad
L-E 8. Obtener los t9rminos :i5m definidos por:
Dinmica del robot 137
n
hilan= Traza(UjkmJjUn
jemax.k.m)
[5. 13]
con i.k.m= 1,2,....n
L-E 8. Obtener la matriz columna de fuerza de !orioli " centr#$eta % = [&i]'cu"o elemento
(ienen definido $or)
n n
h, =hikmqkqm
k=l rn=l
[5. 1*]
L-E +. Obtener la matriz columna de fuerza de ,ra(edad ! = [c-f cu"o elemento et.n defini/
do $or)
n
ci =(- rnjgUji jrJ
j=l
[5. 15]
con i = 1,2,....n
,) e el (ector de ,ra(edad ex$reado en el itema de la bae 01o2"(iene ex$reado $or (gxo,
s. gzo, O)
-rj) e el (ector de coordenada &omo,3nea del centro de maa del elemento j ex$reado en el
itema de referencia del elemento i.
L-E 10. 4a ecuaci5n din.mica del itema er.)
't =Di+H+C [5.16]
donde r e el (ector de fuerza " $are motore efecti(o a$licado obrecada coordenada q.
7O'81
1. 4a deri(ada de la matriz de 9:% o8- re$ecto de la coordenada qj $uede obtenere f.cil/
mente de manera com$utacional, mediante la ex$rei5n)
o 0O8 Q %8 ...
d A j:l j 1; < = ;
:::
dq j - [O] i j >i
con)
138 Fundamentos de robtica
O -1 O O
1 O O O
Q =
O O O O
si la articulacin i es de rotacin
O O O O
O O O O
O O O O
Q =
O O O 1
si la articulacin i es de traslacin
O O O O
2. Anlogamente:
{
DA. Q.j-lA Q k-lA. si iz kz j
su. ( a D J J -l J k-l k 1
__IJ __ a_ ~ _ D k-l j-l
a - a a . - Ak-lQk Aj-Qj A si i~j~k
qk qk qJ
[O ] si k > io j > i
. !as matrices J y " son sim#tricas y semide$inidas %ositi&as.
Figura 5.2. Robot pola r de dos gra dos de liberta d del Ejeplo !.".
Dinmica del robot 139
4. El trmino hikmrepresenta el efecto, en cuanto a fuerza o par, generado sobre el eslabn i
como consecuencia del movimiento relativo entre los eslabones k y m. Se cumple que
hikm=himk y que hiii=O.
. En la obtencin de las matrices de pseudoinercia !i, las integrales est"n e#tendidas al ele$
mento i, de modo que sta se eval%a para cada punto del elemento de masa dm y coordena$
das &#,Yi zi'referidas al sistema de coordenadas del elemento.
Tabla 5.1. Parmetros D-H del robot polar del E(emplo .).
*rticulacin ei di
a, &+i
)
el
o o ,-.
/ o d/ o o
Ejemplo 5.1.
Se va a aplicar el mtodo de 0agrange,Euler para la obtencin del modelo din"mico del robot de /
grados de libertad (el, d2)con base fi(a de la 1igura ./.
0,E ). Se asignan los sistemas de referencia y par"metros de 2enavit,3artenberg seg%n la
1igura .4 5 la 6abla .).
Figura 5.3. Sistemas de referencia del robot polar del Ejemplo 5..
140 Fundamentos de robtica
L-E 2. Matrices de transformacin Ai
el
o -SI o 1 o o o
SI
o
el
o o 1 o o
A -
lA -
l-
o -1 o o
2-
o o 1 d2
o o o 1 o o o 1
el
o -SI -d2S1
SI
o
el
d2el
A =oAlA =
2 I 2
o -1 o o
o o o 1
L-E 3. Matrices u,
-SI O -el O
aOA
el
O -SI O aOA
u ___ 1_
UI2 =__ 1 =[0]
II - as -
o o o o ad2
I
o o o o
-SI o -el
-d2el o o o -SI
aA2 el
o -SI -d2S1 aOA .
o o o
el
U21= U22=
2
=
aSI o o o o ad2 o o o o
o o o o o o o o
L-E 4. Matrices Vijk
-el o
SI
o
aUII
-SI o -el o
UI12=aUII =[o]
UIII =-ae=
o o o o
I
ad2
o o o o
au 12 [] su12 []
UI21=-ae = o UI22=-act= o
I 2
o o o -el
aU22
o o o -SI
aU22 []
U221=--as-
o o o o
U222= ad2 = o
1
o o o o
L-E 5. Matrices de pseudo inercia Ji
;,
: : ;
Dinmica del robot
141
-el o
SI
d2S1 o o o
-el
aU21 -SI o -el -d2el
aU21
o o o
-SI
U211= ---ae- =
o o o o
U22= ad2 =
o o o o
o o o o o o o o
.Y
Elemento 1 Elemento 2
Figura 5.4. Elementosdel robot polar del Ejemplo 5.1.
Elemento 1
f/2dm=O
f/2dm= O
f/lxdm = ixYdm = O
iyzdm =izydm = O
r 2 2
Jl dm=mi!"
ixdm=o
142 Fundamentos de robtica
O O O O
O O O O
JI=
O O mlLI2
mILI
O O
mILI mI
Elemento 2
Puesto que se considera la masa concentrada en el centro de masas y el origen del sistema de coor
denadas del elemento 2 se toma en el mismo centro de masas, la matriz J2 toma la forma:
O O O O
O O O O
J2 =
O O O O
O O O m2
L-E 6, Matriz de inercias D = [di!
d "" = # $razafl%& '"J 'V 'i$( = Tr(V ""J V ""T)+Tr(V 2"J 2V 2"$( =
'=ma)* l%l (
[ , ,
+","L"2m" O
- [ , ,
+","d22m2 O
. l=
,"-L" m" O ,"-d2 m2
,"+"L"2m"
, 2
O O +","d22m2
/ 2
O
=$r
+"-L" m"
0$r
+"-d2 m,
O O O O O O O
O O O O O O O
= *,"2 0+"2 (m"L"2 0*1"2 0+"2 (d2 2m2 = m"L"2 0 m2d2 2
'=mu)*l,2(
+"2d2m2
-+","d2m2
O
O
. . -=+","d2m, -+","d,m, =3
O O - - - -
O O
Dinmica del robot 143
o
d2 = I,TraZa(UkJkUk2T)=Tr(U2J2U22T)=
k =rnaxf Zvl)
SCd2ill2
S2d2ill2
=Tr
-C2d2ill2
-SCd2ill2
O
O
O
O
d22 = ITraza(Uk2JkUk2T)=Tr(U2zJ2U22T)=
k=max(2,2)
S2ill2 -SCill2
-SCill2 C2ill2
=Tr
O O
O O
luego
!-" #$ T%rmino& en 'ilan
,
'J = (Traza(U)J)U*) =Tr(UJJJUT)+ Tr(U2IIJ2U2T) =
)=max(,J,J)
-SJ2d*m2
SJCd*m2
O
O
2
hJJ2 = ,Traza(U )2J )U *) = Tr(U mJ 2U 2T) =
)emaxf Lt.Z)
C*dZm2 &$-,u,.,
SCd2ill2 S2d2ill2
=Tr
O O
O O
1
I
144 Fundamentosde robtica
o
hl21= !TraZa(Uj2IJjU/)=Tr(UnIJ2U2IT)
jemax t l.z.I)
como U221=U212 => hl21=hll2 =d2m2
,
h211= !Traza(U jllJ jU j2 T) = Tr(U mJ 2U22 T) =
j=max(2,1,1)
o 0 1 O O, ,
=SI-d,m2 -CI-d,m, =-d,m2
O O - - - -
O O
-S12d2m2
= Tr SICld2m2
O
O
SICld2m2
-C12d2m2
O
O
2
hl22 = L Traza(Uj22JjU/) = Tr(UmJ2U2IT)=
j=max(I,2,2)
2
h212 = L Traza(UjI2JjUj2T) = Tr(U2I2J2U22T) =
j=max(2,1,2)
SIClm2
-C12m2
! I=" ,c,m, -C,S,m, =#
,
-SIClm2
=Tr
SI-m2
O O
o
h221= ! Traza(U j21J jU j2T ) = Tr(U22IJ 2U 22T)
j=max(2,2,1)
como U 221= U 212 => h221= h212 =
2
h222 = L Tra! a(Uj22JjUj/)=Tr(U222J2U2/)=
j=max(2,2,2)
$-% &. 'a(r)z col*mna de +*erza" de Cor)ol)" , cen(r-+*.a" / = [hi
2 2
h, = L..L..hkml]kl]m =h000&0&0 1h002&0d2 1h020d2&0 1h0Z2d2d2 =
k= m=
, 2 . . 3 2 3 ,
= 4e0 - 1 (d.rn, 1 d2m2 )e0d2 1 4d,5 = 2d2m2e0d2
Dinmica del robot 145
2 2
h, = h2km ; = h2118181 +h21281d2 +h22ld281 +h222d2d2 =
k=1 m=1
luego
L-E 9. Matriz columna de fuerzas de gravedad e = !"#$
N
!" = (- ffi%g& %' %r%(
j=1
con)
g vector de gravedad e*+resado en el sistema de la ,ase del ro,ot -.o/.
g = 0,0,-g,0#
1 vector de coordenadas homog2neas de +osici3n del centro de masas del esla,3n j e*+resado
en el sistema -.%/.45igura 6.7.(
Irl = 0,0,L",l#$
2r2= 0,0,0,l#$
luego)
2
CI=',4- m.gfl %i %r8 =-rnlg& II Irl - m2g&212r2 =
%=1
-.
0 -el
9 El-m,o
-SI 0 -el
-d,c'l
=-m,0 o -g o# 9 )
0 -SI
0#
el
o -SI - d2S1 o
o 0
o -g
0 0 0
0 o =:
o 0 o o 0 0 1
2
C2 ='4-m%g&%2 %r%(=-mlg&'2 'rl - m2g&222r2 =
i=;
-.' o
=-ml0 : #: #
o
-m2: o#
o o o
el
o
o -g o -g
=:
L'
o o o o o
1 o
o o 1
146 Fundamentos de robtica
Por lo tanto:
e=[C;]T =[~l
L-E 10. La ecuacin dinmica del robot ser:
1: =Dt+H+C
T] =(I]L]! "I!d#$%I "!d!I!&]d!
'! =I!d! -d!I!&(!
[). 1*]
ondeT( es el +ar motor e,ecti-o (inclu.endo ro/amiento . otras +erturbaciones$ 0ue act1a so2
bre la articulacin 1 . '! es la ,uer/a motora e,ecti-a 0ue act1a sobrela articulacin !.
Figura 5.5. Robot polar del Ejemplo 5.1. en configuracin horizontal.
1
;
Dinmica del robot 147
W i l
1 1
J !
Como se ve, el modelo dinmico responde a un sistema de 2 ecuaciones diferenciales de 2 or
den no lineales y acopladas. Se observa tambin cmo el trmino ravedad C no aparece en el mo
delo. !sto es debido a "ue la estructura #ori$ontal del robot permite "ue las fuer$as de ravedad se
proyecten sobre los apoyos, no siendo necesario aportacin de par o fuer$a para vencerla. Si se
considerase al robot en posicin #ori$ontal, tal y como aparece en %iura 5.5, mantenindose la de
finicin de los sistemas de referencia de la %iura 5.3, las e&presiones de las matrices y vectores ',
(, J, ) y * resultarn iuales "ue en el caso anterior. Sin embaro, el vector e s+ se ver+a afecta
do, pues a#ora el vector de ravedad e&presado en el sistema de referencia de la base ,So-ser+a.
g / [g,Q,Q,Q]
con lo "ue.
o o
c2 / 0ml1 2 2 341340m21 2 2 24 56 / m2S1
O
-s
I
)e modo "ue las ecuaciones correspondientes al modelo dinmico tomarn a#ora la siuiente
forma.
TI =7m1 81 2 +m.d , 2 9 : 1 +2d2m2ld2 +m.l., cos;, +m.d, cos;.
.. . 2
%2 =m.d , 0d2m2el <rn. sen;,
[5. 18]
148 Fundamentos de robtica
5.3. OBTENCIN DEL MODELO DINMICO DE UN ROBOT MEDIANTE
LA FORMULACIN DE NEWTON-EULER
La obtencin del modelo dinmico de un robot a partir de la formulacin Lagrangiana conduce a un
algoritmo con un coste computacional de orden O(n4). Es decir, el nmero de operaciones a realizar
crece con la potencia cuarta del nmero de grados de libertad. En el caso habitual de robots de 6 grados
de libertad, este nmero de operaciones hace al algoritmo presentado en el epgrafe anterior
materialmenteinutilizable para ser utilizado en tiempo real.
La formulacin de !e"ton#Euler parte del e$uilibrio de fuerzas y pares%
&'=l( ro +ro ) (l(ro) *+. &,-
.n adecuado desarrollo de estas ecuaciones conduce a una formulacin recursi/a en la $ue se ob0
tienen la posicin, /elocidad y aceleracin del eslabn i referidos a la base del robot a partir de los
correspondientes del eslabn i#1 y del mo/imiento rel2ti/o de la articulacin i. 3e este modo, partien0
do del eslabn &se llega al eslabn n. 4on estos datos se procede a obtener las fuerzas y pares ac0
tuantes sobre el eslabn i referidos a la base del robot a partir de los correspondientes al eslabn i5&,
recorri6ndose de esta forma todos los eslabones desde el eslabn n al eslabn &.
El algoritmo se basa en operaciones /ectoriales (con productos escalares y /ectoriales entre mag0
nitudes /ectoriales, y productos de matrices con /ectores) siendo ms eficiente en comparacin con
las operaciones matriciales asociadas a la formulacin Lagrangiana. 3e hecho, el orden de comple7i0
dad computacional de la formulacin recursi/a de !e"ton#Euler es O(n) lo $ue indica $ue depende
directamente del nmero de grados de libertad.
El algoritmo se desarrolla en los siguientes pasos.
5.3.1. Algoritmo om!"t#io$#l !#r# %l mo&%l#&o &i$'mio !or
!e"ton#Euler
!#E 1. 8signar a cada eslabn un sistema de referencia de acuerdo con las normas de 3#9.
!#E :. Obtener las matrices de rotacin -IRy sus in/ersas R_I =C-I R ti =C-I R r ; siendo%
l
cs.
-IR. = SS:
& &
O
#4u<ss<
co.ce,
Su
so.se, -
#so.ce,
co,
Dinmica del robot 149
N-E 3. Establecer las condiciones iniciales.
Para el sistema de la base {So}:
oO)o: velocidad angular = [0,0,0]T
o . T
0!0: aceleracl"nangular = [0,0,0]
o vo: velocidad lineal = [0,0,0]T
ovo: aceleracion lineal = [g#,g$,g%]&
o0!0 ,o roo $ ovo son t'(icamente nulos salvo )ue la base del robot est* en movimiento.
Para el e#tremo del robot se conocer+ la ,uer%a y el (ar e-ercidos e#ternamente n.l,n./ y n.lnn./
0o = [o,",l,
iPi = 1oordenadas del origen del sistema {Si} res(ecto a {Si_l} = [ai .d.S. .a.c.]
i
Si = 1oordenadas del centro de masas del eslabon i res(ecto del sistema {Si }
i 23 = 4atri% de inercia del eslabon i res(ecto del su centro de masas e#(resado en {Si }
Para i = l...n reali%ar los (asos 5 a 6 :
N-E 5. "btener la velocidad angular del sistema {Si}'
{
iR (i-l . )
iro.= i-I O)i_I+ZOqi
I i i-I
Ri_/ roi-7
si el eslab8n i es de rotaci8n
[9. :0]
si el eslab8n i es de traslaci8n
N-E 9. "btener la aceleraci8n angular del sistema {Si}.
si el eslab8n i es de rotaci8n
[9. :/]
si el eslab8n i es de traslaci8n
N-E ;. "btener la aceleraci8n lineal del sistema i:
150 Fundamentos de robtica
i . : ro, Xipi ~i O)ii_:(i mi : : Pi )~i Ri<-I v i~1 . si el eslabn ies de rotain
v. ! R. I(Zoq+ v. 1)" O).X p. "# O).X R. Izoq+
1 1- 1 1- 1 1 1 1- 1
"imi $ (i O)i $% Pi) si el eslabn i es de traslain
&'. ##(
)-* +. Obtener la aelerain lineal del entro de ,ravedad del eslabn i:
i i% 's i (i i) i-
a.!m-$ ."O).X O).X.. "/.
1 1 1 1 1 1 I
&'. #0(
Para i ! n...1 reali1ar los pasos 2 alO.
)-* 2. Obtener la 34er1a e5erida sobre el eslabn i:
%3 iR i"l3 i
i! i"1 i"1"33i a
&'. #6(
)-* 7. Obtener el par e5erido sobre el eslabn i:
i iR &i"1 (i"IR i ) i"13 ( (i i) 'r i- i (i Ii ) &' #'(
8i! i"1 8i" i Pi X i"1 " Pi".i x m, ai" i O)i"O)iX i O)i .
)-* 19. Obtener la 34er1a o par apliado a la arti4lain i
{
. T'
_ %8i %Ri_I1o
'ti- . T'
%3. 'R. I:O
, ,-
si el eslabn i es de rotain
si el eslabn i es de traslain
&'. #;(
8onde 'tes el par o 34er1a e3etivo (par motor menos pares de ro1amiento o pert4rbain).
<abla '.#. Parmetros D-H del robot polar del Ejemplo 5.2.
=rti4lain .i di a,
-79
O
*5emplo '.#.
*n el ep>,ra3e anterior se obt4vo el modelo din?mio del robot de la @i,4ra '.# a travAs de la 3orB
m4lain de Ca,ran,e-*4ler. .e va a obtener aD4> el modelo din?mio del mismo robot, 4tili1ando
la 3orm4lain de )eEton-*4ler.
Dinmica del robot 151
:L
+---4
Figura 5.6. Configuracin y ejes de referencia del robot polar del Ejemplo 5.2.
N-E 1. La asignacin de los sistemas de referencia segn D-H es la mostrada en la Figura 5.6.
Los correspondientes parmetros de D-H se muestran en la !a"la 5.#.
N-E #. Las matrices de rotacin -IRy sus in$ersas son:
le%
o
&
'(% l)
o
! j
le%
o
-" # j
*(I + s)
o
el
$
*(# + ,
o
el
-$ o o -$ o
le%
" I
! lj
'(% l)
o
! j
le%
" I
) 1-
1(o + o o $ #(o + o o
-" I el
o
-" I el
N-E ..
//// +: 0 o% o% or
o %o + 0 /% /% /r
& mo +: 0 1 % 1 % 1 r
*2o +: 0 o% 1 % gr
y como no se e3ercen fuer4as e5ternas en el e5tremo del ro"ot: .f. + .D. + 1
152 Fundamentos de robtica
Zo =[o.o.i]'
IPI=[o.o.o]'
ISI=[O,O,LI]
2P2 = [0,0,d2f
2 S2 =[0,0,0]
y por estar toda la masa de los elementos 1 y 2 concentrada en sus respectivos centros de gravedad:
l
o l
III= O
l
o l
212 = O
N! ".
N-ES.
Dinmica deL robot 153
N-E 6.
N-E 7.
N-E 8.
154 Fundamentos de robtica
N-E 9.
2 2R [3 (3R 2 ) 3f] (2 2) 2 21 2 2 (21 2 )
DI= 3 D3 + 2 P2 X 3 + P2 + 52 X ffi2 a2 + 2 0)2 + 0)2 X 2 0)2 =
Dinmica del robot 155
N-E 10.
T [ .. 2 (d2~~+Lm)g .. 2 ]T 1 1
T, =n, Rozo = (- a,d, - 2a,d,~,)m, - e.i, m, 1-01 =
=(Sd22 +28!2d2)m2 +SL"2m#
$o% #o !an!o, #a& e'aione& ('e om)onen e# mode#o din*mio &on+
T" = (S#d, +28!2d2)m2 +S"L,m#
F2 =m2d2 - m2d2812
[-. 2.]
E'aione& ('e oiniden on #a& o/!enida& [-.1.] median!e e# )#an!eamien!o de Lag%ange0
E'#e%.
5.4. MODELO DINMICO EN VARIABLES DE ESTADO
La e'ai1n [-.12] e&!a/#ee e# mode#o din*mio in3e%&o de 'n %o/o!, dando #o& )a%e& 4 5'e%za& ('e
de/en )%o)o%iona% #o& a!'ado%e& )a%a. ('e #a& 3a%ia/#e& a%!i'#a%e& &igan 'na de!e%minada !%a4e!o%ia
((!)+
6!=7!+8+9 [-. 28]
En e&!a e:)%e&i1n on3iene %eo%da% ('e #a ma!%iz de ine%ia& 7 4 #a ma!%iz o#'mna de g%a3edad e
de)enden de #o& 3a#o%e& de (, 4 ('e #a ma!%iz o#'mna de 5'e%za& de 9o%io#i& 4 en!%;)e!a& 8 de)ende
156 Fundamentos de robtica
de q yq . Asimismo, hay que tener presente que el vector de pares generalizados 't, presupone pares
efectivos, por lo que de existir pares perturbadores o de rozamiento (viscoso o seco) stos debern ser
tenidos en cuenta, siendo:
't 't motor ! 't perturbador ! 't rozamiento viscoso ! 't rozamiento seco
"#$%&'
(a expresi)n "#$%*' es por tanto no lineal, no siendo trivial obtener a partir de ella el modelo di+
nmico directo que proporciona la trayectoria seguida como consecuencia de la aplicaci)n de unos
pares determinados 't$ ,ara obtener este modelo directo, as- como por su utilidad posterior en el desa+
rrollo de alguna tcnica concreta de control, puede ser conveniente obtener el modelo dinmico en
variables de estado$
(as variables de estado naturales del sistema sern las posiciones y velocidades de cada una de las
articulaciones, siendo por lo tanto el vector de estado "q, q f$ (a ecuaci)n "#$%*' puede expresarse
como:
.q +/ +e='t 0 .q +1 't 0
"#$ 23'
con 1=/ + 4$ yhaciendo uso del vector de estado:
"#$25'
donde n' es funci)n de q y 1 es funci)n de q y q. (a expresi)n "#$25' puede ponerse tambin de la
forma:
"#$2%'
u=.!5('t ! 1)
6sta representaci)n responde a una ecuaci)n de estado lineal, habindose trasladado la no lineali+
dad a la entrada u$ 6n la 7igura #$8 se representa el correspondiente diagrama de bloques, donde:
A ~ [~ ~] matriz (2nx 2n) y B ~ [~] matriz (2nx n)
Dinmica del robot 157
u
Figura 5.7. Diagrama de bloques de la dinmica de un robot en el espacio de estado.
El bloque sombreado es un bloque no lineal que depende del estado [q, q], lo que se representa
mediante lnea discontinua.
Ejemplo 5.3.
Para el robot del Ejemplo 5.1 en su disposicin horizontal, se obtuvo el modelo dinmico inverso
dado por la ecuaciones [5.18!
", # $%%i,&,' ( %%i'd) * 8, ( 'd2%%i'8,d' ( m.+l.. cos,. ( m.+d , cos,-
.' # %%i'ct' /d'%%i'8,' (%%i'+sen0,
[5.11
o e2presadas en %orma matricial!
con
0e tomar como vector de estado [013 d ' ,81.d ' r'resultando!
158 Fundamentos de robtica
D ' ~ [ m ' L " :m ,d" ;]
D - ' ( N _<) ~ [ m ,L . ' : m ,d,'
2d2ffi2ld2 +ffilgL I cosel +ffi2gd2 cosel - TI
m . L ," +ffi2d/
. 2
- d2ffi2el +ffi2gSeel - !2
L " ec#"ci$ de es%"do %om "&' l" fo&m ":
#(
2d2m 2ld2 + m lgL I cosel + m 2gd2 cosel - TI
m . L ,) +ffi2d22
. 2
- d2ffi2el +ffi2gSeel -F2
m2
l el
d2
(*+
d2
+,+#
el l
d2
d2
[ -. ./]
co:
0 0 1 0 0 0
0 0 0 1 0 0
*(
0 0 0 0
Y ,(
1 0
0 0 0 0 0 1
1s%" e23&esi$ 3e&m i%i&4" &esol5e& co&3#%"cio"lm e%e el m odelo di'm ico di&ec%o. 6"&%iedo
de #"s codicioes iici"les de 3osici$ [ el, d2] T 75elocid"d [ l' d 2 f8 de #" sec#eci" de 3"9
&es y f#e&:"s ( TI , !2; " lo l"&go del %iem 3o, se e5"l#"&4" 3"&" el is%"%e iici"l el 5ec%o& # y " 3"&%i&
de l, m edi"%e [ -. ./], el 5ec%o& de&i5"d" del es%"do [ I ' d 2 ' el' d 2 ].
Dinmica del robot 159
Puesto que:
81(k) =l (k- 1)~t+81(k-1)
d, (k) =d, (k- 1)~t+ 82 (k-1)
podran evaluarse los valores de la posicin [el, d2fen un instante Lltposterior, y conocidos stos
y los nuevos valores de las velocidades [l' d2]T se repetira el proceso para el instante siguiente.
5.5. !"#L! "$%&$'! #% #L #(P)'$! "# L) T)*#)
#l +odelo din,+ico o-tenido relaciona coordenadas articulares con pares o .uer/as desarrolladas en las
articulaciones. #n ocasiones es conveniente tener el +odelo din,+icoe0presado co+o una relacin entre
la trayectoria del e0tre+o del ro-ot y las .uer/as y pares que en l se aplican, re.eridos todos a un
siste+a de coordenadas cartesianas .i1o del entorno de tra-a1o. 'uando los datos 2trayectorias, .uer/as,
pares, etc.3 se dan en estas coordenadas, se dice que se tra-a1a en el espacio de la tarea.
Para o-tener esta e0presin del +odelo din,+ico se partir, de la e0presin [4.56] y de la relacin
[7.68] que esta-lece las relacin entre velocidades cartesianas y articulares 9aciendo uso de la +atri/
:aco-iana. (eg;n sta:
: =Jq [4. <4]
donde jrepresenta el vector de velocidades cartesianas del e0tre+o del ro-ot re.eridas al siste+a de
coordenadas asociado a su -ase J = [ x , y, z , a,~,yr."erivando esta e0presin se o-tiene:
[4.<6]
#0presiones que relacionan las aceleraciones cartesianas y articulares de +anera directa e inversa.
Por otra parte, partiendo del 9ec9o de que la potencia consu+ida por el ro-ot de-e ser la +is+a tanto
si se eval;a en el espacio cartesiano co+o en el articular, se tiene:
Potencia = Par' velocidad = > TT J = 'tT q [4. <?]
donde TT es el vector de .uer/as y pares e1ercidos en el e0tre+o del ro-ot e0presado en el siste+a de
coordenadasde la -ase y 'tT el vector de .uer/as y pares e1ercidas en las articulaciones. "e [4.<4] y [4.<?]
se o-tiene:
160 Fundamentos de robtica
[5.38]
Expresin, de destacable utilidad, que relaciona los pares generalizados ejercidos en el extremo del
robot con los ejercidos en cada una de las articulaciones.
Sustituyendo [5.3] y [5.38] en la ecuacin del modelo din!mico [5."] se obtiene#
't=Dt+H+C $%
JTT=cJ-IJ-DJ-Ijq+H+C $%
T$ (JTrDJ-IJ-(JTrDJ-Iq+(JTrH+(JTr C $%
[5. 3&]
con
Dj =(JTrDJ-1
Hj $ (JTr(H-DJ-1jq)
'j =(JTtc
[5. ()]
*as expresiones [5.3&] y [5.()] de+inen el modelo din!mico en coordenadas cartesianas o de la ta,
rea de un robot a partir de su modelo din!mico en el espacio articular o de la con+iguracin y de su
matriz -acobiana.
5.6. MODELO DINMICO DE LOS ACTUADORES
'omo se .a indicado en la introduccin de este cap/tulo, el modelo din!mico de un robot se compone
por una parte del modelo de su estructura mec!nica, que relaciona su mo0imientocon las +uerzas y pares
que lo originan, y por otra parte del modelo de su sistema de accionamiento, que relaciona las rdenes de
mando generadas en la unidad de control con las +uerzas y pares utilizados para producir el mo0imiento.
En el 'ap/tulo 1, dedicado a la mor+olog/a del robot, se indic que son los actuadores el2ctricos de
corriente continua los m!s utilizados en la actualidad, si bien es notable la tendencia a sustituir 2stos
por motores sin escobillas. En un caso u otro, el modelo din!mico del actuador responde a ecuaciones
similares, por lo que a e+ectos de establecerlo se considerar! el de motor de corriente continua.
3or su parte, los actuadores .idr!ulicos son usados en robots en los que la relacin peso manipula,
ble4peso del robot deba ser ele0ada. El modelo din!mico de un actuador .idr!ulico es signi+icati0a,
mente m!s complejo que el de un actuador el2ctrico. 5 las caracter/sticas din!micas del conjunto ser6
1 ' I 1
Dinmica del robot 161
R
L
Figura 5.8. Esquema de funcionamiento de un motor de corriente continua controlado por inducido.
va-vlvula cilindro (o motor) se le debe incorporar el comportamiento no invariante del fluido
(aceite), cuyas constantes dinmicas (ndice de Bul, viscosidad, etc.) varan notablemente con la
temperatura. !or "ltimo, las propias lneas de transmisi#n, tuberas o man$ueras, %ue canali&an al
fluido desde la bomba a las servo-vlvulas y de 'stas a los actuadores, pueden influir en el comporta(
miento dinmico del con)unto.
*e van a e+poner a continuaci#n los modelos dinmicos %ue son admitidos para traba)ar con ambos
tipos de actuadores, debiendo %uedar claro %ue en ambos casos se ,an reali&ado cierto n"mero de
simplificaciones %ue, por lo $eneral, son vlidas.
5.6.1. Motor elctrico de corriente continua
-n accionamiento el'ctrico de corriente continua consta de un motor de corriente continua alimentado
por una etapa de potencia y controlado por un dispositivo anal#$ico o di$ital. .l modelado del motor de
corriente continua controlado por inducido (/i$ura 5.8) responde a las ecuaciones %ue a continuaci#n se
deducen.
0uando el rotor $ira, se induce en 'l una tensi#n eb directamente proporcional a la velocidad an(
$ular y %ue se conoce como fuer&a contraelectromotri& 1
25.31 4
5a velocidad de $iro se controla mediante la tensi#n ea, salida del amplificador de potencia. 5a
ecuaci#n diferencial del circuito del rotor es 1
25. 364
162 Fundamentos de robtica
Etapa de potencia
(puente de transistores) +
Constante de fuerza 14-------------.
conlraeleetromotriz
Dinmica
de la
estructura
mecnica
Velocidad
de la
articulacin
Posicin
demando +
Intensidad
por el
1--__ -1Realimentacin de intensidad 14---..... devanado
Par perturbador
Figura 5.9. Esquema de bloques del modelo de motor elctrico de corriente contnua.
Por otra parte, el motor desarrolla un par proporcional al producto del flujo en el entreierro !V y la
intensidad i, siendo el flujo en el entreierro"
#$%&'(
donde if es la corriente de campo% De esta manera, la e)presin del par desarrollado por el motor es la
si*uiente"
#$%&&(
Para una corriente de campo if constante, el flujo se vuelve constante, y el par es directamente pro+
porcional a la corriente ,ue circula por el rotor"
t-.i
p
#$%&$(
Este par se emplea en vencer la inercia y la friccin, adems de posibles pares perturbadores"
#$% &/(
Por lo tanto, las ecuaciones del motor de corriente continua controlado por induccin son"
Dinmica del robot 163
eb= kb8
(Ls +R)i +e, = ea
't=ki
p
. 't-'tp
8=-----'-
Js+B
[5. 47]
donde todas las variables son en transformada de Laplae.
!ara el ontrol del motor se inl"#en las etapas de potenia # ontrol, "tili$%ndose realimentai&n
de intensidad # veloidad, tal # omo se representa en la 'i("ra 5.).
*n la 'i("ra 5.+, se -a representado el dia(rama de blo."es orrespondiente -aiendo "so de f"n/
iones de transferenia [001213)4], [561$$o3)5] y [001213)7], donde p"eden reali$arse iertas simpli/
fiaiones8
s+a
G] =k--::::::k,
s+ b
97 = : ,
L8888880
J, B8 ;neria # ro$amiento visoso e."ivalentes vistos
a la salida del e<e del rotor
1
1
8
Js+B
R+Ls
Figura 5.10. Diagrama de bloques del modelo de motor elctrico de corriente continua.
164 Fundamentos de robtica
Las simplificaciones del anterior diagrama permiten obtener (en ausencia de perturbaciones):
8(s) kpkk2 km
u(s) =(R + kkz)(Js + B) + kp (kb + kTkk2) Tms+ !
"#$%8&
"#$%'&
donde se tiene (ue:
k ) kpkk2
m kp(kb +kTkk2)+B(R+kk2)
k ) Bkpkk2
m kp(kb +kTkk2)+B(R+kk2)
"#$ #*&
J(R+kk2)
T=--:------'---:---'-:----~
m kp(kb +kTkk2)+B(R+kk2)
+ J
T =-
m B
"#$ #!&
,e obser-a. por lo tanto. (ue el comportamiento tension-elocidad del motor de corriente continua
responde al de un sistema de primer orden$ /n cuanto a la relaci0n tensi0npar. responde a un par
polocero$ /n la pr1ctica. la calidad de los motores utilizados en ser-oaccionamientos y las ele-adas
prestaciones de sus sistemas de control. 2ace (ue esta relaci0n pueda considerarse casi constante (sin
la din1mica propia de los polos y ceros)$
5.6.2. Motor hidrulico con servovlvula
La introducci0n de sistemas electr0nicos anal0gicos. y recientemente digitales. para el control de las
-1l-ulas de distribuci0n de caudal utilizadas en los accionamiento 2idr1ulicos (lineales o rotati-os). 2a
permitido la e-oluci0n de las -1l-ulas proporcionales a las ser-o-1l-ulas. consiguiendo (ue el
comportamiento din1mico de los actuadores 2idr1ulicos tenga la calidad adecuada para ser usados en
ser-omecanismos.y en especial en rob0tica$
/l con3unto e(uipo electr0nico. ser-o-1l-ula y motor 2idr1ulico (4igura #$!!) puede ser modelado
en una -ersi0n simplificada seg5n las siguientes ecuaciones:
Dinmica del robot 165
Equilibrio de pares:
[5.52]
Par desarrollado por el motor:
[5. 53]
Continuidad de caudales:
[5. 54]
Caudal de fuga:
[5. 55]
Prdida de caudal por compresin del fluido:
[5. 5]
Electrnica de mando de la corredera de la ser!o !"l!ula:
#$g%u& [5. 5']
Caudal suministrado por la ser!o!"l!ula:
[5.5(]
#
u
Electrnica
demando
Figura 5.11. Esquema de un actuador hidrulico (motor hidrulico).
166 Fundamentos de robtica
donde:
8: ngulo girado por la paleta (y el eje) del rotor.
1": par proporcionado por el motor.
1"p: par externo perturbador.
J, B: inercia y constante de rozamiento iscoso (de motor y carga) asociados a la articulaci!n.
"l#: di$erencia de presi!n entre las dos cmaras del motor.
%&: caudal proporcionado por la serolula (entrada al motor).
%( caudal 'ue se $uga entre las dos cmaras del motor (lea(age).
%c: caudal perdido por la compresibilidad del $luido (depende del )ndice de Bul(, del olumen y de
la di$erencia de presiones).
.: olumen en la cmara de entrada al motor.
y: posici!n de la corredera de la serolula.
u: tensi!n de re$erencia a la electr!nica de mando de la seroula.
(p, (, y (, se considerarn constantes.
*l dispositio electr!nico de mando de la corredera de la lula se dise+a con el objetio de 'ue
la relaci!n entre se+al de mando ,u, y posici!n de la corredera ,y, sea lo ms parecida posible a una
constante. -i bien este objetio no es del todo alcanzable, existiendo siempre una cierta dinmica en
dic.a relaci!n, la elocidad de la misma es muy superior a la dinmica propia del accionamiento .i/
drulico y de la articulaci!n, por lo 'ue puede ser considerada como constante.
#or este motio, la relaci!n 01.12& se sustituye por:
01. 13&
#or otra parte, la relaci!n entre la posici!n de la corredera de la lula, la di$erencia de presiones
y el caudal suministrado 01.18J es en principio no lineal. "inealizando entorno a un punto de $uncio/
namiento se obtiene:
01. 45&
#or lo tanto, la relaci!n entre la se+al de mando ,u,, el caudal %& y la presi!n di$erencial "l#ser:
01.41J
#or 6ltimo, la elocidad de ariaci!n de olumen en la cmara del motor v ] ser proporcional a la
elocidad de giro de la paleta, luego:
01. 47J
Dinmica del robot 167
Con lo que las ecuaciones [5.54], [5.55] y [5.56] podrn agruparse como:
[5. 63]
Transformando por Laplace las ecuaciones [5.52], [5.53], [5.6] y [5.63] se o!"iene el diagrama de
!loques de la #igura 5.2, que como se o!ser$a presen"a una a!solu"a analog%a con el correspondien"e
a un accionamien"o el&c"rico '#igura 5.() sal$o por la realimen"aci*n de $elocidad de giro del ac"ua+
dor presen"e en aqu&l. ,s"a -l"ima puede ser incluida en la elec"r*nica de mando, siendo en"onces el
modelado de am!os ac"uadores equi$alen"e aunque con carac"er%s"icas dinmicas y posi!ilidades dife+
ren"es.
.
$.
/!
0
~
+ 1. 2 .3
.
&
U
1
-
1
---+
/l
~
' "
k,
kr+ /.s
+
4s56
/.
#igura 5.2. Diagrama de bloques delmodelo de actuador hidrulico.
,n el caso de u"ili7ar un cilindro 8idrulico el modelado se 8ace ms complicado, mo"i$ado en"re
o"ras ra7ones por la diferencia de reas del &m!olo en am!as cmaras, lo que 8ace que su funciona+
mien"o a e9"ensi*n y re"racci*n sea no"a!lemen"e diferen"e.
,s"udios ms de"allados del modelado de accionamien"os 8idrulicos pueden encon"rarse en
[WA!"-#$%.
5.7. BIBLIOGRAFA
[:;:<=>2?5] @. :maris, Modelado y control de la flexin de robots de grandes dimensiones, Tesis
Aoc"oral, A=>:;, Bni$ersidad 3oli"&cnica de ;adrid, ??5.
[C<:=C2D?]4.4. Craig, E;anipula"or AynamicsE, en: Introduction to Robotics, :ddsison Fesley, 2a
edici*n, ?D?.
168 Fundamentos de robtica
[D' Azzo-95] J.J. D' Azzo y C.H. Houpis, "Writing System Equtions", en! Linear Control System
Analysis and Design, "#$r%-Hi&&, ' e(i#i)n, *995
[+u-,,] -.S. +u, .C. $onz/&ez y C.S.$. 0ee, "Din/mi# (e& 1rzo (e& .o2ot", en! Robtica, Con
trol, Deteccin, Visin e Inteligencia, "#$r%-Hi&&3&ntermeri#n, "(ri(, *9,,
[4$A5A-96] -. 4gt, "E&e#trome#7ni#& Systems", en! System Dynamics, 8renti#e-H&& 9ntemtio:
n& E(itions, 6 e(i#i)n, *996.
[4$A5A-9;]-. 4gt, ""o(e&(o "tem/ti#o (e Sistems Din/mi#os", en! Ingeniera de Control
Moderna, 8renti#e-H&& Hispnomeri#n, 6 e(i#i)n, *99;.
[8A<0-,*].8. 8u&, "Dynmi#s", en! Robot Manipulators, Matematics, !rogramming and Control,
57e "95 8ress, "ss#7ussets, *9,6.
[SA05A.E=-9>] . S&tren, "erramientas para el modelado y dise#o param$trio de robots basadas
en la din%mica de los sistemas multicuerpo, 5esis Do#tor&, D9SA", <ni?ersi(( 8o&it@#ni# (e
"(ri(, *99>
[<9C-E.->5]J.J.<i#Aer, &n te Dynamic Analysis o' Spacial Lin(ages )sing *+* Matrices, 87.D.
Disserttion, =ort7%estem <ni?ersBty, E?ston, 9&&, *9>5.
[<9C-E.->']J.J <i#Aer, J. Den?Bt y .S. Hrten2erg, "An 9terti?e "et7o( Cor t7e DBsp&#ement
An&ysis oC Spti& "e#7nism", ,rans- ASM. /ournal oiApplied Mec-, Do&. ;*, Serie 1, *9>'.
[WA554=-,9], J. Wtton, ".esponse, St2i&ity n( Contro& oC E&e#tro7y(ru&i#s Systems", en! Fluid
!o0er Systems, 8renti#e-H&&, *9,9.
Captulo 6
CONTROL CINEMTICO
No hay atajo sin trabajo.
Refranero popular
En captulos anteriores se ha visto cmo obtener el modelo cinemtico y dinmico de un robot. El
objetivo fundamental de ambos modelos es el de poder establecer las adecuadas estrategias de control
del robot que redundenenuna mayor calidad de sus movimientos.
El control cinemtica establece cules son las trayectorias que debe seguir cada articulacin del
robot a lo largo del tiempo para lograr los objetivos fijados por el usuario (punto de destino, trayecto
ria cartesiana del efector final del robot, tiempo invertido por el usuario, etc.!. Estas trayectorias se
seleccionarn atendiendo a las restricciones fsicas propias de los accionamientos y a ciertos criterios
de calidad de trayectoria, como suavidad o precisin de la misma.
6.1. FUNCIONES DE CONTROL CINEM TICO
"a #igura $.% muestra de manera esquemtica el funcionamiento del control cinemtica. &ecibe como
entradas los datos procedentes del programa del robot escrito por el usuario (punto de destino, precisin,
tipo de trayectoria deseada, velocidad o tiempo invertido, etc.! y apoyndose en el modelo cinemtica
delrobot establece las trayectorias para cada articulacin como funciones de tiempo. Estas trayectorias
deben ser muestreadas con un perodo ' a decidir, generndose en cada instante (' un vector de
referenciasarticulares para los algoritmosde control dinmico.
169
170 Fundamentos de robtica
PROGRAMA
~
Punto de destino (x,y,z,a,p;y)
Tipo de trayectoria
Tiempo a invertir o velocidad
Precisin del punto final y de la trayecto
GENERADOR
r Velocidady aceleracin
mxima de la articulaci
DE
TRAE!TOR"A#
$ I
MODE%O
!"NEM&T"!O
Trayectorias articulares q,(t)
'
M(E#TREO
I
Referencias para el control dinmico q,(kT
!ONTRO%
D"N&M"!O
ria cartesiana
n
Figura 6.1. Funcionamiento del control cinemtica (en sombreado).
De manera )eneral* el control cinemtico de+er reali,ar las si)uientes funciones-
' . !onvertir la especificacin del movimiento dada en el pro)rama en una trayectoria anal/tica en
espacio cartesiano 0evlucin de cada coordenada cartesiana en funcin del tiempo1.
2. Muestrear la trayectoria cartesiana o+teniendo un n3mero finito de puntos de dic4a trayectoria.
!ada uno de estos puntos vendr dado por una 56upla* t/picamente (x, y, ,* a, ~,y,).
7. (tili,ando la transformacin 4omo)8nea inversa* convertir cada uno de estos puntos en sus co9
rrespondientes coordenadas articulares (Q,Q2,Q3,Q4,q5,q6). De+e tenerse en cuenta a:u/ la posi+le
solucin m3ltiple de la transformacin 4omo)8nea inversa* as/ como la posi+ilidad de ausencia
de solucin y puntos sin)ulares* de modo :ue se ase)ure la continuidad de la trayectoria.
;. "nterpolacin de los puntos articulares o+tenidos* )enerando para cada varia+le articular una
expresin Q(t) :ue pase o se aproxime a ellos de modo :ue* siendo una trayectoria reali,a+le
por los actuadores* se transforme en una trayectoria cartesiana lo ms prxima a la especificada
por el pro)rama del usuario 0en cuanto a precisin* velocidad* etc.1.
<. Muestreo de la trayectoria articular para )enerar referencias al control dinmico.
Control cinemtica 171
t
a)
y
b)
y
2
'b 2
.q
q
3
ql
r'
q.
q
4
q4
q.
c)
ql q
d)
x
X
.1
J
x
e)
y
Figura 6.2. Ejemplo de control cinemtico de un robot de 2 grados de libertad.
La Figura 6.2 muestra un posible caso en el que se pretende que un robot de 2 grados de libertad se
mueva en lnea recta desde el punto jl=(X i) hasta el punto t=(x4, /) en un tiempo !Figura 6.2"a).
#l control cinem$tico selecciona % puntos de esta trayectoria r.&2' l,&% !Figura 6.2"b) y mediante la
trans(ormaci)n homog*nea inversa obtiene los correspondientes vectores articulares ql! q2! q3! q+
!Figura 6.2"c). , continuaci)n trata de unir estos % puntos con alg-n tipo de (unci)n que pasando por
todos ellos garantice la suavidad y no supere las velocidades y aceleraciones m$ximas permisibles
para cada accionador !Figura 6.2"d). #l resultado (inal del movimiento del extremo del robot es una
trayectoria que se aproxima en mayor o menor medida a la lnea recta deseada !Figura 6.2"e).
#l principal inconveniente del procedimiento descrito para la generaci)n de trayectorias radica en
la necesidad de resolver repetidamente la trans(ormaci)n homog*nea inversa' lo que conlleva un ele.
vado coste computacional. /omo alternativa' puede ser considerado un procedimiento basado en la
utili0aci)n de la matri0 1acobiana.
/omo se describi) en el apartado %.2' la matri0 1acobiana establece las relaciones di(erenciales
entre variables articulares y cartesianas en t*rminos de la ecuaci)n 3%.645' que de manera compacta
puede expresarse como6
1!t) =J(q)q(t) 36. 15
172 Fundamentos de robtica
Esta relacin es lineal y para una localizacin q determinada permite conocer las velocidades car
tesianas a partir de las correspondientes articulares. Adems, suponiendo J(q) invertible, lo que ocu
rrir siempre que las dimensiones del espacio articular y de la tarea sean iguales y q no sea un punto
singular, se podr expresar:
q(t) =J- (q)j(t) !".#$
%e este modo, a partir de la trayectoria cartesiana deseada para el extremo del robot &et' podr ob
tenerse su derivada y, a trav(s de la relacin anterior, la velocidad que debe seguir cada una de las
articulaciones. %ebe considerarse que esta relacin es lineal y, por lo tanto ms, )cil de obtener que
la que utiliza la trans)ormacin *omog(nea. +o *ay que olvidar, sin embargo, que J(q) var,a para cada
localizacin q considerada, siendo por tanto necesario actualizar continuamente los valores de los
elementos de la matriz J.
-a implementacin de este procedimiento en la unidad de control de un robot exigir, una vez ms,
la discretizacin de la trayectoria &et' y su derivada en un n.mero )inito de puntos que, posteriormen
te, y tras ser convertidos a velocidades articulares debern ser interpolados.
/or lo tanto, para estudiar el control cinemtico de un robot se deber )undamentalmente conocer
qu( tipo de interpoladores pueden ser e)icaces para unir los puntos articulares por los que se quiere
pasar. Asimismo, ser conveniente establecer criterios para seleccionar cuntos y qu( puntos sern
muestreados en la trayectoria del espacio cartesiano.
6.2. TIPOS DE TRAYECTORIAS
/ara realizar una tarea determinada el robot debe moverse desde un punto inicial a un punto )inal. Este
movimientopuede ser realizado seg.n in)initas trayectorias espaciales. %e todas ellas *ay algunas que,
bien por su sencillez de implementacin por parte del control cinemtico o bien por su utilidad y
aplicacin a diversas tareas, son las que en la prctica incorporan los robots comerciales. %e este modo,
puede encontrarseque los robots dispongan de trayectorias punto a punto, coordinadas y continuas.
6.2.1. Trayectorias punto a punto
En este tipo de trayectorias cada articulacin evoluciona desde su posicin inicial a la )inal sin realizar
consideracin alguna sobre el estado o evolucin de las dems articulaciones. +ormalmente, cada
actuador trata de llevar a su articulacin al punto de destino en el menor tiempo posible, pudi(ndose
distinguir dos casos: movimientoe&e a e&e y movimiento simultneo de e&es.
Control cinemtica 173
Movimiento eje a eje
Slo se mueve un eje cada vez. Comenzar a moverse la primera articulacin, y una vez que sta haya
alcanzado su punto final lo har la segunda, y as sucesivamente. ste tipo de movimiento da o!viamente
como resultado un mayor tiempo de ciclo, teniendo como "nica ventaja un menor consumo de potencia
instantnea por parte de los actuadores.
Movimiento simultneo de ejes
n este caso todos los actuadores comienzan simultneamente a mover las articulaciones del ro!ot a una
velocidad especfica para cada una de ellas. #ado que la distancia a recorrer y las velocidades sern en
general diferentes, cada una aca!ar su movimiento en un instante diferente.
l movimiento del ro!ot no aca!ar hasta que se alcance definitivamente el punto final, lo que se
producir cuando el eje que ms tarde concluya su movimiento. #e esta manera, el tiempo total inver$
tido en el movimiento coincidir con el del eje que ms tiempo emplee en realizar su movimiento
particular, pudindose dar la circunstancia de que el resto de los actuadores hayan forzado su movi$
miento a una velocidad y aceleracin elevada, vindose o!ligados finalmente a esperar a la articula$
cin ms lenta.
%or los motivos e&puestos, las trayectorias punto a punto no estn implementadas salvo en ro!ots
muy simples o con unidades de control muy limitadas.
'.(.(. )rayectorias coordinadas o isocronas
%ara evitar que algunos actuadores tra!ajen forzando sus velocidades y aceleraciones, teniendo que
esperar despus la conclusin del movimiento de la articulacin ms lenta, puede hacerse un clculo
previo, averiguando cul es esta articulacin y qu tiempo invertir. Se ralentizar entonces el
movimientodel resto de los ejes para que inviertan el mismo tiempo en su movimiento, aca!ando todos
ellos simultneamente. Se tiene as que todas las articulaciones se coordinan comenzando y aca!ando su
movimientoa la vez, adaptndose todas a la ms lenta.
l tiempo total invertido en el movimiento es el menor posi!le y no se piden aceleraciones y velo$
cidades elevadas a los actuadores de manera in"til. #esde el punto de vista del usuario la trayectoria
que descri!e el e&tremo del ro!ot no es significativa, siendo sta impredeci!le, aunque como es o!vio,
un conocimiento del modelo y control cinemtico del ro!ot permitira su clculo.
'.(.*. )rayectorias continuas
Cuando se pretende que la trayectoria que sigue el e&tremo del ro!ot sea conocida por el usuario
+trayectoriaen el espacio cartesiano o de la tarea,, es preciso calcular de manera continua las trayectorias
articulares.
)picamente, las trayectorias que el usuario pretende que el ro!ot descri!a son trayectorias en lnea
recta o en arco de crculo. %ara conseguirlo ha!r que seguir los pasos indicados en el epgrafe '.-. l
resultado ser que cada articulacin sigue un movimiento aparentemente catico con posi!les cam!ios
174 Fundamentos de robtica
de direccin y velocidad y sin coordinacin con el resto de las articulaciones. Sin embargo, el resulta
do conjunto ser que el extremo del robot describir la trayectoria deseada.
La Figura 6.3 representa las trayectorias articulares q(t) y q2(t) y el resultado inal en el espacio de
la tarea (x, y) para un robot tipo S!"#" correspondientes a los cuatro tipos de trayectorias indicadas.
y
q
b$
X
q 2
q
e$
y
q
X
x
. e. . .%
a$
y
x
d$
y
Figura 6.3. Diferentes trayectorias articulares posibles para un robot SCARA de 2 GOL. a) movimiento ee a
ee! b) movimiento simult"neo de ees! e) trayectoria coordinada! d) trayectoria continua rectil#nea.
Control cinemtica 175
6.3. GENERACIN DE TRAYECTORIAS CARTESIANAS
Normalmente el usuario del robot indica el movnmento que ste debe realizar especificando las
localizaciones espaciales por las que debe pasar el extremo, junto con otros datos, como instantes de
paso, velocidades o tipos de trayectorias. As, por ejemplo, es frecuente especificar que el robot debe ir
de un punto inicial hasta otro final, siguiendo en cartesianas una lnea recta a velocidad constante.
Puesto que estos puntos estn excesivamente separados !salvo tal vez la excepci"n de algunos ro#
bots de pintura programados por guiado, tal y como se ver en el $aptulo %& es preciso seleccionar
puntos intermedios suficientemente cercanos como para que el control del robot consiga ajustar no
s"lo el punto final al especificado, sino tambin la trayectoria seguida a la indicada en el programa.
Para ello es preciso establecer un interpolador entre las localizaciones expresadas en el espacio de
la tarea que dar como resultado una expresi"n analtica de la evoluci"n de cada coordenada. 'a in#
terpolaci"n ms frecuente es la lineal, en la que cada coordenada evoluciona a velocidad constante
desde su valor inicial j( hasta el final ) *
+,.-.
donde ti /tf son los instantes de tiempo en los que se pretende alcanzar la localizaci"n inicial y final,
respectivamente.
Para evitar las discontinuidades de velocidad en el caso de paso por varios puntos, pueden utilizar#
se las tcnicas de interpoladores a tramos o interpoladores c0bicos que se describen en el epgrafe ,.1
para el caso de variables articulares.
6.3.1. Evolucin de la orientacin
$omo es conocido, la especificaci"n de la posici"n por parte del usuario se realiza habitualmente, y
salvo escasas excepciones, en coordenadas cartesianas. 2in embargo, tal y como se vio en el $aptulo -,
la especificaci"n de la orientaci"n puede realizarse mediante diferentes herramientas, como son*
matricesde rotaci"n, ngulos de 3uler !en sus diferentes versiones&,par de rotaci"n o cuaternios.
3sta 0nica alternativa de representaci"n de la posici"n no deja dudas en cuanto a que el procedi#
miento ms adecuado para unir dos posiciones en el espacio de la tarea es la evoluci"n lineal, a velo#
cidad constante, de cada coordenada cartesiana desde su valor incial hasta el final, resultando un mo#
vimiento sencillo, fcilmente interpretable por el usuario y de calidad.
2in embargo, para el caso de la orientaci"n, esta evoluci"n lineal desde el valor inicial hasta el fi#
nal puede ser planteado en trminos de matrices de rotaci"n, ngulos de 3uler, par de rotaci"n o cua#
temios, resultando en cada caso trayectorias diferentes.
'a utilizaci"n de las matrices de rotaci"n lleva a resultados inconsistentes. $omo es sabido, las
matrices de rotaci"n deben ser necesariamente matrices ortonormales. 'a interpolaci"n lineal entre
176 Fundamentos de robtica
una matriz de rotacin inicial y otra final lleva a matrices intermedias no ortonormales y, por lo tanto,
que no corresponden a matrices de rotacin.
Ejemplo 6.1.
Supngase que se quiere evolucionar desde una orientacin inicial dada por:
hasta otra final dada por:
r
o -1
u, = o o
1 o
La orientacin R corresponde a una rotacin desde la orientacin definida por R de 90 res!
pecto del e"e z seguido de una rotacin de 90 respecto del e"e #.
$omo se puede compro%ar, las columnas o filas de am%as matrices son ortonormales. La evolu!
cin lineal entre estas & matrices dar'a lugar a una a una matriz intermedia dada por:
r
()& *()&
Rm+ , ()&
()& ,
$uyas filas y colunmas no son ortonormales y, por lo tanto, Rm no puede corresponder a una
orientacin v-lida del e#tremo del ro%ot.
La utilizacin de -ngulos de .uler, en cualquiera de sus formas, adem-s de ser la representacin
m-s compacta, no presenta este inconveniente. /s', para pasar de una orientacin inicial 0u, 1, 23a
una final 04 5 *, ~f, Yf)se podr'an utilizar las funciones lineales:
Control cinemtica 177
( )
t= t.
(t) = af -a I +a.
I t, - ti I
[6.4]
donde ti Ytf son los instantes de tiempo en los que se pretende estar en la orientacin inicial y final,
respectivamente. El inconveniente de esta trayectoria es que desde el punto de vista del usuario, es una
trayectoriano intuitiva, con etra!as evoluciones de la orientacin.
"a evolucin m#s natural desde una orientacin inicial $asta otra final, ser%a aquella que $ace &irar
de manera pro&resiva al efector final (u o'(eto manipulado por el ro'ot) desde su orientacin inicial
$asta la final en tomo a un e(e de &iro fi(o. )or este motivo, la utili*acin del par de rotacin, o su
equivalente, los cuatemios, es la manera m#s adecuada para &enerar la trayectoria cartesiana de
orientacin.
+omo se esta'leci en el ep%&rafe ,.-.,, dado un sistema ortonormal inicial y otro final rotado res.
pecto del primero, eiste un /nico e(e 0 que permite pasar del sistema inicial al final &irando un #n.
&ulo 1 respecto a 2l. )or lo tanto, para que el etremo del ro'ot evolucione desde la orientacin inicial
$asta la final, se podr# 'uscar cu#l es el par (0,1) que relaciona los sistemas de coordenadas ortonor.
males asociados a am'as orientaciones, y reali*ar la evolucin temporal mediante un &iro en tomo al
e(e 0 de valor3
t - t.
8(t)=8 I
t , 4 ti
[6.5]
6 partir del valor de 1(t) para instantes concretos de tiempo ser# inmediato conocer el cuatemio
correspondiente.
6.4. INTERPOLACIN DE TRAYECTORIAS
+omo se $a indicado, una de las funciones del control cinem#tico es la de unir una sucesin de puntos
en el espacio articular por los que se quiere que pasen las articulaciones del ro'ot en un instante
determinado. 6dem#s, (unto con las condiciones de posicin4tiempo, es conveniente a!adir restricciones
en la velocidad y aceleracin de paso por los puntos, de manera que se ase&ure la suavidad de la
trayectoriay se limiten las velocidades y aceleraciones m#imas. Estas restricciones &aranti*ar#n que los
actuadoresest#n capacitados para implementar la trayectoria final.
178 Fundamentos de robtica
Para ello deber seleccionarse algn tipo de funcin (frecuentemente polinmica) cuyos parme
tros o coeficientes se ajustarn al imponer las condiciones de contorno: posiciones, velocidades y
aceleraciones. En la seleccin de esta funcin debe considerarse ue tanto el clculo de sus parme
tros, como su posterior utili!acin para generar puntos de consigna al control dinmico, debe "acerse
en tiempo real, por lo ue la simplicidad de la funcin ser un factor a valorar.
#e van a presentar a continuacin las funciones interpoladoras utili!adas con mayor frecuencia.
$ada una de ellas "a sido desarrollada para un solo grado de libertad, debiendo uedar claro ue el
mismo clculo deber repetirse para cada uno de los grados de libertad del robot. $abe indicar ue si
bien las t%cnicas de interpolacin ue a continuacin se describen estn planteadas para el espacio
articular son igualmente aplicables para el espacio de la tarea.
6.4.1. Interpoladores lineales
#upngase ue se pretende ue una de las articulaciones q del robot, pase sucesivamentepor los valores
qi en los instantes & 'na primera solucin a este problema consistir(a en mantener constante la velocidad
de movimientoentre cada ) valores sucesivos (qi-l, qi) de la articulacin.
*a trayectoria entre dos puntos qi-l, qi ser(a entonces:
(
. . + ) t , ti-+
q(t) - q' - q'- T . qi-l
T=ti_ti-+
/0.01
$omo es obvio, esta trayectoria asegura la continuidad de la posicin, pero origina saltos bruscos
en la velocidad q de la articulacin, y consecuentemente precisa de aceleraciones ij de valor infinito
(ver 2igura 0.3), lo ue en la prctica no es posible.
*a seleccin de los instantes de paso ti por los puntos i podr "aberse "ec"o segn los diferentes
criterios e4puestos en el ep(grafe 0.). Esto es:
+ . 5ntentando ue cada articulacin q alcance el punto de destino en el menor tiempo posible sin
considerar las dems articulaciones, lo ue resultar en velocidades q constantes e iguales a la
m4ima.
). 6justando los instantes de paso a los de la articulacin ue ms tiempo precise, resultando mo
vimientos coordinados.
7. #eleccionando los tiempos a partir de las especificaciones dadas en el espacio de la tarea de
modo ue el e4tremo del robot describa una trayectoria predeterminada,
6.4.2. Interpoladores cbicos
Para asegurar ue la trayectoria ue une los puntos por los ue tiene ue pasar la articulacin
considerada presente continuidad en velocidad, puede recurrirse a utili!ar un polinomio de grado 7 ue
una cada pareja de puntos adyacentes. 8e este modo, al tener cuatro parmetros disponibles se podrn
imponer cuatro condiciones de contorno, dos de posicin y dos de velocidad. *os valores de las
Control cinemtica 179
q
q
q
l'
Figura 6.4. Posicin, velocidad y aceleracin para un interpolador lineal.
velocidades de paso por cada punto deben por tanto ser conocidas a priori. Esta seleccin no es obvia y
se tratar posteriormente.
Se consigue as una trayectoria compuesta por una serie de polinomios cbicos, cada uno vlido
entre dos puntos consecutivos. Este conjunto de polinomios concatenados, escogidos de modo que
exista continuidad en la posicin y velocidad, se denominan splines (cbicos, por ser de tercer grado).
na exposicin detallada de los mismos puede encontrarse en [ANAND-93].
!a expresin de la trayectoria que une dos puntos adyacentes el",qi) ser#
q(t) $ a % b( t & r"') % c(t & ti&( )) % d( t & r"#" r
r-:
a=q
b=q_i-l
* (. . + ) ) . + + .
1 1- 1- .J
e $ T 2 q _ q _ T 2 q _ T ) q
d !_3_(qi _ qi-I) "# ,$ % !i-l "q_i)
,* ,-
,$ti&ti-&
./.01
180 Fundamentos de robtica
Para poder calcular los valores de los coeficientes del polinomio cbico de la expresin [6.7] es
preciso conocer los valores de las velocidades de paso / . Para ello existirn diferentes alternativas.
Un primer criterio para seleccionar las velocidades de paso [C!"#$%&] podr'a ser(
si si)no (qi _ qi-I) - : 1 = si)no (qi+1 _ qi)
si si)no (qi _ qi-I) * si)no (qi+1 _ qi)
[6. %]
+sta seleccin es de sencilla reali,acin - da como resultado una continuidad ra,onable en la velo.
cidad. /in embar)o0 no establece nin)una condicin sobre la continuidad de la aceleracin.
Como alternativa pueden esco)erse las velocidades de paso de modo 1ue cada spline cbico sea
continuo en posicin0 velocidad - aceleracin con los dos polinomios ad-acentes. 2e esta forma0 los
coeficientes de los 3$l polinomios de tipo spline cbico 1ue pasan por los puntos qi 4ie [503]60 ase)u.
rando la continuidad en posicin0 velocidad - aceleracin de la tra-ectoria )lobal0 sern los dados por
la expresin [6.7]0 donde las velocidades de paso por los puntos se obtienen de resolver el si)uiente
sistema de ecuaciones lineales de dia)onal dominante [7#+/$76](
t8 94 t9 : t86
,
7 7 e/ t;8 [ ( e) 2 ( q 3 _ q 2 ) + ( t3 ) 2 ( q 2 _ q J ) ]
t$
7 t< 94t8:t<6 t8 7
. ,
q -
t8;< [ ( t3 ) 2 ( q 4 - ) + ( t4 n q 3 _ q 2 ) ]
[6.&]
7 7 t= 94t<:t=6 t< e
o tfi
t3;t3 [4t3$>69413 ?13$>6:4t369413$> _ q ! - 2 ) ] "
. 3
q
Como se observa0 el sistema tiene 3$9 ecuaciones - 3 inc)nitas0 1ue son las distintas velocidades
de paso por los 3 puntos. Para completar el nmero de ecuaciones de modo 1ue el sistema est@ defini.
do0 se pueden aAadir las si)uientes condiciones(
B5 . k O
q = q = [6. 5C]
+s decir0 1ue la articulacin parte de - lle)a a una situacin de reposo. Por lo tanto0 las 3 ecuacio.
nes lineales definidas en [6.&] - [6.5C] permiten obtener las 3 velocidades de paso necesarias para
poder aplicar la expresin [6.7] de los splines cbicos0 ase)urando la continuidad Dasta la se)unda
derivada de la tra-ectoria )lobal.
Una ltima alternativa para obtener las velocidades de paso ij' ser'a partir de las velocidades de pa.
so deseadas en el espacio de la tarea. 2e este modo0 lo mismo 1ue el modelo )eom@trico del robot
permite obtener las coordenadas articulares q a partir de las cartesianas j, el modelo cinemtica
4mediante el uso de la > acobiana6 permitir'a obtener las velocidades articulares ij a partir de las carte$
1 1
ControL cinemtica 181
sianas j.Sin embargo, es preciso en este caso considerar los problemas derivados de la posible exis
tencia de puntos singulares en la trayectoria cartesiana escogida, que daran lugar a velocidades arti
culares infinitas no realizables por los actuadores.
6.4.3. Interpoladores a tramos
En los interpoladores vistos hasta el momento, se utiliza un polinomio de un grado determinado (l o !
para unir dos puntos consecutivos de la trayectoria. El uso de polinomios de tercer grado permite
asegurar que el polinomio pasa por los dos puntos y al mismo tiempo permite imponer los valores de
velocidad de paso por los mismo. Sin embargo, al contrario de lo que ocurre con el interpolador de
primer grado (lineal!, la velocidad de la articulaci"n durante el recorrido est# variando continuamente, lo
que exige un control continuo de la misma.
$na alternativa que proporciona una soluci"n intermedia consiste en descomponer en tres tramos
consecutivos la trayectoria que une dos puntos l,ql. En el tramo central se utiliza un interpolador
lineal, y por lo tanto la velocidad se mantiene constante, no siendo preciso imprimir aceleraci"n algu
na al actuador. En los tramos inicial y final se utiliza un polinomio de segundo grado, de modo que en
el tramo 1 la velocidad vare linealmente desde la velocidad de la trayectoria anterior a la de la pre%
q
qt ~..
q t
t
q
a
tramo 1 tramo & tramo '
Figura 6.5. Interpolador con tres tramos.
182 Fundamentos de robtica
sente, y en el tramo 3 vare desde la velocidad de la trayectoria presente hasta la de la siguiente. Se
tiene entonces que en los tramos inicial y final la aceleracin toma valores constantes distintos de
cero, mientras que en el tramo intermedio la aceleracin es nula.
En el caso simple de una trayectoria con dos nicos puntos de velocidad inicial y final nula, se tie
ne (ver Figura .!" que las ecuaciones de los tres tramos seran#
a?
q +s$t-
y2
q(t)= q%&s&'s(t
2a
). **+
q
q
q
,&*# -t-,
o
q
t
a
t
Figura 6.6. Interpolador con ajuste parablico.
Control cinemtico 183
siendo:
V
1"=
a
ql _qO V
T=s +-
V a
V: velocidad mxima permitida
a: aceleracin a utilizar
. ( 1 O )
s: SIgnO !
"n el caso de tener una tra#ectoria $ormada por varios puntos% la velocidad de paso por los puntos
intermedios no de&er'a ser nula% puesto ue esto dar'a lugar a un movimiento discontinuo del ro&ot.
"sta situacin puede ser evitada si se permite ue la tra#ectoria no pase exactamente por los puntos.
(a tra#ectoria $inal coincidir'a con las tra#ectorias rectil'neas ue unen los puntos dos a dos salvo en
las cercan'as de los mismos% donde un polinomio de )* grado permitir'a variar progresivamente la
velocidad% evitando los valores in$initos de la aceleracin ue +an sido descritos en el apartado ,. -. 1 .
Ver la .igura ,. ,.
"sta t/cnica% denominada a0uste para&lico% se aproxima al interpolador lineal tanto ms cuanto
ma#or sea la aceleracin permitida% coincidiendo con au/l en el caso de aceleracin in$inita. 1s'% si
se uiere pasar por los puntos l,ql 2len los instantes t = O % t = TI 2 t = TI +T)% respectivamente%
se tendr'a ue la ecuacin de los tres tramos ue componen la tra#ectoria ue une dos puntos conse3
cutivos ser'a:
q(t) = 4,. 1 )5
6onde a es la aceleracin constante ue permite cam&iar la velocidad de un tramo al siguiente%
siendo su valor:
4,. 1 75
184 Fundamentos de robtica
y 21 es el tiempo utilizado en variar la velocidad del movimiento, estando repartido simtricamente
respecto al instante TI. Lgicamente, cuanto mayor sea la aceleracin a permitida menor ser el tiem
po de transicin 1.
Asimismo, es fcil obtener el mximo error cometido entre la trayectoria ideal (pasando por l! y
la real con el segmento parablico" #ste se produce en t $ TI y toma el valor%
&'" 1()
#ste error disminuye al permitir tiempos de cambio de trayectoria 1ms peue*os, siendo nulo si
no se utilizase tramo parablico (1$ +!,la aceleracin apudiese tomar el valor infinito"
6.4.4. Otros interpoladores
-iferentes tipos de interpoladores .an sido propuestos y utilizados para conseguir unir los puntos de la
trayectoria con funciones continuas, derivables dos veces y computacionalmentemane/ables" Aparte de
las ya citadas, puede destacarse la utilizacin de funciones senoidales , ue aseguran continuidad en
todas las derivadas" -e este modo, para unir dos puntos consecutivos podr0an utilizarse funciones de la
forma%
q(t) =a1 bt1csen(rot! &'" 12)
3mponiendo las condiciones de contorno en posicin, velocidad y aceleracin, se obtendr0an los
correspondientes coeficientes" #n &4567A8A9::) puede verse un estudio comparativo de diversos tipos
de interpoladores"
6.5. MUESTREO DE TRAYECTORIAS CARTESIANAS
5na vez analizadas algunas de las diferentes alternativas para interpolar los puntos seleccionados de la
trayectoria ue garanticen la obtencin de curvas realizables por los actuadores, ueda por establecer
criterios adecuadospara la seleccin ptima de los puntos de la trayectoria cartesiana"
La trayectoria cartesiana ms .abitual es la l0nea recta, utilizndose tambin en ciertas ocasiones
trayectorias circulares" Ambas pueden ser descritas con facilidad de manera anal0tica en funcin del
tiempo, de modo ue es fcil conocer las coordenadas cartesianas por las ue se desea ue pase el
extremo del robot en un instante concreto"
;udiera parecer en principio ue cuanto mayor sea el n<mero de instantes en los ue se muestrea la
trayectoria cartesiana, se obtendrn me/ores resultados, por cuanto ue la trayectoria final pasar0a por
estos puntos a/ustndose a lo especificado con mayor precisin" =in embargo, debe considerarse ue
Control cinemtica 185
cada uno de estos puntos debe ser transformado a sus correspondientes coordenadas articulares y ser
despus utilizado en alguno de los interpoladores presentados en el epgrafe 6.3 para generar la tra
yectoria articular. Por lo tanto es claro que el costo computacional, limitado por la necesaria respuesta
en tiempo real del sistema de control del robot, desaconseja que el nmero de puntos cartesianos a
tomar crezca de manera indiscriminada.
Por otra parte, la no linealidad existente en el modelo geomtrico del robot indica que, dependien
do de su cinemtica y de la posici!n instantnea en cuesti!n, el error cometido entre la trayectoria
resultante del extremo del robot y la trayectoria cartesiana deseada "que coincidirn en los puntos
seleccionados# puede $ariar enormemente. Por lo tanto, es con$eniente decidir no s!lo cuntos puntos
se seleccionan de la trayectoria cartesiana, sino tambin cules son estos puntos, teniendo siempre
como objeti$o llegar a un compromiso entre el nmero de puntos seleccionados y el error entre la
trayectoria resultante y la deseada.
%on estos objeti$os en [TAYLOR-79] se propone un algoritmo recursi$o que permite seleccionar
s!lo aquellos puntos de la trayectoria cartesiana estrictamente necesarios, quedando stos ms pr!xi
mos entre s all donde se producira mayor error de la trayectoria, y ms espaciados en los tramos en
los que las trayectorias deseada y resultante son ms cercanas.
&n la prctica suele ser suficiente con seleccionar puntos equidistantes tan cercanos como sea po
sible, asegurando que las trayectorias articulares puedan ser generadas antes del tiempo en que sean
requeridas por el control dinmico del robot.
6.6. BIBLIOGRAFA
'()()*+,3- ../. (nand, 0%ur$es0, en 1 Computer Graphics and Geometric Modeling for Engineers,
2o3n 4iley 5 6ons, 7,,3.
'%8(9:+;,-2.7. %raig, 0<rayectory :eneration0, en1 Introduction to Robotics Mechanics and Control,
(ddison+4esley, 7,;,.
'=u+;;- >.6. =u, 8.%. :onzalez y %.6.:. ?ee, 0Planificaci!n de <rayectorias de un @anipulador0,
en1 Robtica: Control, Deteccin, Visin e Inteligencia, @c:raA+BillC9nteramericana, @adrid,
7,;;.
'@D2<(/(+EE- @.6. @ujtaba, 0*iscussion of trayectory calculation met3ods0, Explorator !tud of
Computer lntegrated "ssembl !stems, 9nternal 8eport F 6<()+%6+t6+G6;, 6tanford (rtificial
9ntelligent ?aboratory, 6tanford Dni$ersity, %alifornia.
'8H:&86+E6-*.=.8ogers y 2.(. (dams, 06pace %ur$es0, en1 Mathematical elements for computer
graphics, @c:raA+Bill, 7,E6.
'6%B9??9):+,I- 8.7. 6c3illing, #undamentals of Robotics "naliss and Control, Prentice+Ball, 7,,I.
'<(J?H8+E,-8.B. <aylor, 0Planning and execution of straig3t line manipulator trajectories0, I$M
%ournal of Research and De&elopment, K3, pp. LKL+LK6.
1 "
Captulo
CONTROL DINMICO
Lo mejor es enemigo de lo bueno.
Refranero popular
A un robot se le demandanpor lo general elevadas prestaciones en velocidady precisin de movimiento.
Este objetivo ha marcado en gran medida las investigaciones y avances tecnolgicos realizados en el
campode la robtica. La utilizacin de materiales ms ligeros, de sistemas de transmisin sin holgura y
con baja inercia, de actuadores rpidos y precisos o de sensores de elevada resolucin, han permitido
mejorar de manera notable la calidaddel movimientodel robot.
Del mismo modo, los algoritmos de control del robot tienen por objetivo mejorar al mximo las ca
ractersticas de velocidad y precisin. El control cinemtico selecciona trayectorias !ue idealmente
deber seguir el robot para, teniendo en cuenta sus limitaciones, ajustarse lo mejor posible a las espe
ci"icaciones del movimiento dadas por el usuario. En la prctica, este ajuste del movimiento del robot
a las especi"icaciones del usuario no ser del todo posible, pues las caractersticas dinmicas del robot
#inercias, rozamiento, holguras, etc.$ muchas veces desconocidas, impiden en general una coinciden
cia entre la trayectoria deseada !d#t$ y la real !#t$.
El control dinmico tiene por misin procurar !ue las trayectorias realmente seguidas por el robot
!#t$ sean lo ms parecidas posibles a las propuestas por el control cinemtico !d#t$. %ara ello hace uso
del conocimiento del modelo dinmico del robot #obtenido en el &aptulo '$ y de las herramientas de
anlisis y dise(o aportadas por la teora del servocontrol #representacin interna, estado, estabilidad
de Lyapunov, control %)D, control adaptativo, etc.$.
&omo se vio al obtener el modelo dinmico de un robot, *ste es "uertemente no lineal, multivaria
ble, acoplado y de parmetros variantes, por lo !ue en general su control es extremadamente comple
jo. En la prctica ciertas simpli"icaciones, vlidas para un gran n+mero de los robots comerciales
187
188 Fundamentos de robtica
existentes, facilitan el diseo del sistema de control, dando unos resultados razonablemente acepta
bles, aunque limitando en ciertas situaciones la calidad de sus prestaciones.
La utilizacin de tcnicas de control ms potentes, que podran dar mejores resultados, pueden
verse limitadas en la prctica por la elevada complejidad y coste computacional, que si bien es abor
dable con la tecnoloa actual, supone un mayor coste econmico.
!ormalmente el control dinmico se realiza en el espacio articular, esto es, controlando las tra
yectorias articulares q"t# del robot. $in embaro, en ciertas ocasiones, como por ejemplo cuando el
robot entra en contacto con el entorno desarrollando fuerzas de reaccin, puede optarse por realizar el
control en el espacio de la tarea o cartesiano, controlando la trayectoria del extremo jet#.
%n este captulo se van a examinar las tcnicas de control dinmico ms frecuentes, centrndose
principalmente en el control en el espacio articular. &entro de ste se considerar tanto el control
monoarticular, en el que se desprecia la interaccin entre los rados de libertad del robot, como el
control multiarticular, en el que se considera al robot como el sistema multivariable que realmente es.
Las tcnicas de control utilizadas sern las basadas en control '(& y control por prealimentacin,
ampliamente extendidas, utilizndose tambin en ocasiones la linealizacin por inversin del modelo.
$e realizar asimismo aluna referencia a tcnicas de control ms potentes, como puede ser el control
adaptativo.
7.1. CONTROL MONOARTICULAR
Las caractersticas mecamcas de un robot "dimensiones, peso, tipo de actuadores, etc.# influyen
notablemente en el tipo de control a utilizar. )ecordando una vez ms la expresin del modelo dinmico
de un robot "ecuacin *+.,-.#/
't 0 D(q)q +H(q,q) +C(q) +1yq *2. ,.
en la que se 3a incluido la existencia del par debido al rozamiento viscoso mediante la matriz diaonal
constante 1y, puede intuirse cmo la estructura cinemtica del robot va a modificar la forma de las
matrices &, 4 y e y, por lo tanto, la complejidad del modelo y su correspondientecontrol.
5simismo, factores como la presencia de reductores o la existencia de elevados rozamientos visco
sos "notables, por ejemplo, al utilizar ciertos reductores o en los actuadores 3idra6licos# pueden 3acer
despreciables aluno de los trminos de la ecuacin *2.,..
7.1.1. Influencia del factor de reduccin
7onsidrese por ejemplo que cada actuador incorpora un reductor, de modo que la posicin de la
articulacinq est relacionada con la posicin del eje del correspondiente actuador q. mediante/
Control dinmico 189
qa = K q [7.2]
donde K es la matriz diagonal de los factores de reduccin, cuyos coeficientes son k>1.
onsecuentementese !erificar"n las relaciones#
l a =Kq t L =Kq [7.$]
donde " C a e%&resa el &ar resultante en el e'e del actuador. (or otra &arte, la matriz de inercia D(q) &uede
e%&resarse )*em&recomo#
D(q) =DI +D2 (q) [7.+]
donde DI es una matriz diagonal formada &or los elementos constantes de la diagonal &rinci&al de D(q) y
re&resenta la contri,ucin de cada esla,n en la inercia que so&orta su corres&ondiente actuador.
)ustituyendo las e%&resiones [7.$] y [7.+] en el modelo din"mico del ro,ot [7.1], se o,tiene#
[7.-]
que se &uede e%&resar de la siguiente manera#
donde#
[7..]
/!a# es la matriz diagonal de constantes de rozamiento !iscoso !isto &or los actuadores 0a la entra1
da del reductor2.
" C p: &uede ser considerado como un &ar &ertur,ador.
3a /igura 7.1 re&resenta mediante diagrama de ,loques las ecuaciones [7..], donde los !alores de
los ,loques re&resentados &or ca'as o!aladas de&enden de las !aria,les que llegan a ellos a tra!4s de
las flec5as a tramos. 3os ,loques encerrados en el recuadro som,reado est"n formados &or matrices
diagonales constantes, lo que indica que re&resentan el efecto que so,re el mo!imiento de la articula1
cin i tiene el &ar &ro&orcionado &or el &ro&io actuador. (or su &arte, los ,loques fuera del recuadro
no son constantes sino que de&enden de las &osiciones y !elocidades de los e'es y re&resentan el
efecto " C p que so,re la articulacin i tiene el mo!imiento de los dem"s e'es.
6ste esquema &ermite e!aluar en que condiciones &uede considerarse al ro,ot como a una serie de
esla,ones din"micamente desaco&lado 0t, des&recia,le2, en las que el mo!imiento de uno de ellos no
afecta a los dem"s.
190 Fundamentos de robtica
"'----------,
'" I
- - - - - - - ~ " ' - - - - q
'" I
'"
+
I r
s
"'---1-------1 q
' "
' "
' "
-----_'"
r E ]
I
I
q. P---"
I r
s
Figura 7.1. Diagrama de bloques que representa el comportamiento dinmico de una articulacin.
Obsr vese que si los factor es de r educcin son elevados, esto es, si las velocidades del movimiento
de los actuador es la son notablemente mayor es que las de las ar ticulaciones q , se tendr que los
elementos de la matr iz diaonal ! ser n muy su"er ior es a la unidad, y consecuentemente !#Iser una
matr iz diaonal de elementos de r educido valor . E n este caso, el tr mino ' tp ser des"r eciable y "odr
consider ar se que las ar ticulaciones del r obot estn desaco"ladas, de modo que un "ar motor en el ac$
tuador i tendr efecto %nicamente sobr e el movimiento de la ar ticulacin i, siendo esta r elacin la
cor r es"ondiente a una ecuacin difer encial lineal de &' or den (r ecur dese que K, DI )*va son matr i$
ces diaonales constantes+. ,or lo tanto, el dise-o del r eulador ms adecuado "ar a cada ar ticulacin i
"uede .acer se utilizando las tcnicas ms fr ecuentes de dise-o (,I /, "r ealimentacin+, cuyo ob0etivo
es ar antizar las es"ecificaciones de funcionamiento a%n ante "er tur baciones o im"r ecisiones en el
conocimiento de DI y *v-
1in embar o, no debe "ensar se que la intr oduccin de un r eductor de elevada r elacin es en ene$
r al conveniente. *r ente a las venta0as a"or tadas der ivadas de la "osible sim"lificacin del modelo
dinmico del r obot, a"or ta im"or tantes inconvenientes, como son el consider able aumento del r oza$
miento viscoso y la intr oduccin de .olur as y elasticidades en la tr ansmisin.
2omo se se-al en el 2a"3tulo &, dedicado a la mor folo3a del r obot, e4isten en la actualidad alu$
nos modelos de r obots denominados de accionamiento dir ecto, en los que se .a "r escindido del uso de
r eductor es (! 5 6+. E n ellos se consiuen mayor es velocidades y "r ecisiones a costa de una mayor
com"le0idad en el dise-o del sistema de contr ol, der ivado de no "oder consider ar ' tp des"r eciable.
Control dinmico 191
Ejemplo 7.1
Supngase que el robot de 2 grados de libertad del Ejemplo 5.1 en configuracin horizontal, cuyos
eslabones estn representados en la igura !.2, est accionado a tra"#s de reductores de factor de
reduccin 1$$ (l"uelta del eje suponen 1$$ "ueltas del motor%. &simismo, supngase que e'iste
un par de rozamiento "iscoso caracterizado por las constantes f"l ( f"2 ( 5 )ms*rad.
Figura 7.2. Eslabones del robot del Ejemplo 7.1.
+omo dimensiones del robot se tomar, m- ( 1$.g , m, ( 1.g , LI( $.1 m , g ( 1$rn*S2.
/al y como se obtu"o en el Ejemplo 5.1, el modelo dinmico del robot "iene dado por,
0or lo tanto se tendr,
192 Fundamentos de robtica
[
100 O 1
K = O 100
[
81 ] = K -1 [8al 1= [1O~ : 8al ]
d, da2 10 da2
\ '
1,
r
"
\
1/
~ ]
.;------------,
".;----.. I
[
1O-ICOS(1O-~ ~ .J(1~ 21O-2d'2)~ 82'1?~ 8d'2'ld'2] ..'; I I
10 sen(lO 8.1 )-10 d.28a1 I I
I I
_______1 -'
Ir '
.;
I I
[lO-: d! ~ ] ,' "
~
"
: [! .l ]
I
f' "
' t' p
I
[: : ]
[! : ]
[: : 1
I .2
I
+ ..-
I
[: .11
I
. . . 1 " [ 1 0 5 O ]
[1/ S O] [l~ S
"l"
".
-,\ ,~
,..
O 1 0 #
O 1/ s
,..
~ -
~
[$ 10~ l
$ 10-#
Figura 7.3. Diagr ama de bl o!e" del model o di#$mi%o del r obot del &'empl o (.1.
Control dinmico 193
[
1O-4f ] [510-4]
F -K-IF K-I - vI_
va - v - lO-4fv2 - 510-4
Con lo que la representacin en forma e ia!rama e "loques el moelo in#mico el ro"ot
quear# como en la Fi!ura $%&% 'uee apreciarse cmo la aportacin e par r( es si!nificativa)
mente peque*a( puieno ser espreciaa%
7.1.2. Control PID
+n casos como los e,puestos en el ep-!rafe anterior( el control el ro"ot puee ser tratao como el
control e n e.es inepenientes( inclu/eno en el par pertur"aor 0tp el efecto e los par#metros no
constantes e la ia!onal e la matri1 D, as- como sus elementos no ia!onales / los pares !eneraos por
la !ravea / movimientos relativos 2matrices e / 34% +n estos casos y suponieno el accionamiento e
tipo el5ctrico( se tenr# 2ver ep-!rafe 5%6%14 que el corresponiente ia!rama e "loques e caa e.e ser-a
el mostrao en la Fi!ura $%4% 'or claria se prescine e aqu- en aelante el factor e reuccin
aplicao en el e.e%
Figura 7.4. Diagrama de bloques de un accionamiento elctrico.
194 Fundamentos de robtica
Los trminos J y B son, respectivamente, inercia y rozamiento viscoso vistos por el actuador, e in
cluyen tanto los efectos del eslabn y la articulacin como los del motor y la transmisin.
En la prctica, la calidad de los sistemas de accionamiento es tal que se consigue una relacin li
neal entre la tensin de mando y el par proporcionado por el accionamiento, de modo que:
't ku !"."#
con lo que al ser:
t $%s +B&sq +'tp !". '#
resulta:
!".(#
)uponiendo *:p ine+istente y perfectamente conocidos ,, % -B, podr.a plantearse obtener por inver
sin del modelo la tensin de mando u$t& que resultar.a en una trayectoria q$t& preestablecida. )in
embargo, en la prctica ninguna de las dos premisas planteadas es cierta, por lo que es /abitual utili
zar un esquema de control realimentado como el indicado en la 0igura ".1.
En este esquema, 2$s& representa un regulador tipo 345 de funcin de transferencia:
!". *6#
f 'p
q d
/
+ e
, u *:
q
,
788 2$s&
,
...
kl
...
k "
. . .
..
..
. .
. .
87
*: =$%'9 B&sq 9:tp
;ccionamiento
;rticulacin
;lgoritmode control
0igura ".1. Esq uema d e algoritmo d e controlbasad o en PID.
Control dinmico 195
El trmino k-J se ha introducido al objeto de que la salida del regulador R(s) sea directamente el
par 't de entrada a la articulacin. La seal de mando u (le! de control) en los accionamientos ser"
entonces#
1( $ ) 1
u =- k s% k. % k &' -e
s p I d k
(). **+
Esta e,presin representa la le! de control que permite calcular cu"l es el par que se pretende que
den los actuadores del robot. A la -ista del diagrama de bloques. se tiene que#
*# =R(s)e (). */+
! haciendo uso de la ecuacin ().0+ que establece el comportamiento din"mico de la articulacin. se
tendr"#
(J s % 1)sq % *#p 2 R(s) e 3
*#p 2 R(s) e - (J s % 1)sq
(). *4+
5onsiderando que e 2 q d - q ! sumando (J s + 1)s q d en ambos miembros de ().*4+ se tiene#
*#p %(J &%1)&qd =(R(s)%(J s%1)s+e (). *6+
5on lo que el error entre la tra!ectoria deseada qd(t) ! la real q(t) -endr" dada por#
*#p +(J s +1lsq .
e( s) =-R'-(-s )-%-(-Js-%-1-'')-s
(). *7+
Esta e,presin de e(s) indica que si no se cambia la posicin deseada (qd(&) 2 8). pero aparece una
perturbacin en 9orma de escaln (r,2 lis). el error -aldr"#
1
e(s) 2 3-----#-----
(kps%k: %kds/)%(J s%1)&/
(). *;+
&upuesto el sistema estable. el -alor 9inal del error podr" obtenerse por aplicacin del teorema del
-alor 9inal#
3e( <<) 2 lim se(s) 2 8
7--6<
siempre que k: ' * 8 (). *)+
196 Fundamentos de robtica
Obsrvese que de utilizar un regulador sin accin integral (regulador PD, k = O),el error ante per
turbacin escaln valdra
1
e(s) = ----=---------=
s!(kp "kd#)"($#"%)#&
!'( )*&
siendo su valor +inal
1
,le(oo) =li- s. e(s) =-
/O k
p
!'( )0&
que, aunque dis-inuir1 al au-entar la ganancia proporcional kp, no llegar1 a 2acerse cero(
Por lo tanto, el esque-a de control propuesto, utilizando un regulador P3D (con accin integral no
nula) garantiza, sie-pre que el dise4o del regulador resulte en un siste-a estable, que el e+ecto de los
pares perturbadores en +or-a de escaln se anula(
Por otra parte, suponiendo que no e5istiese perturbacin, pero se de-andase a la articulacin que
evolucionase seg6n una deter-inada tra7ectoria qd(t), se tendra, seg6n la ecuacin !'()8&
($s" %lsq ,
e( s) = .9.(s.).".($.s:".;..%.)s
!'( <=&
con lo que al ser por de+inicin e = qd. q se tendr1
!($s"%)s"9(s).($s"%)s&qd = !($s"%)s"9(s)&q =>
9(s) ($s " %)s
...... = ).......
9(s) " ($s " %)s 9(s) " ($s " %)s
!'( <)&
>s decir, q(t) no coincide a lo largo del tie-po con qd(t)( ?s, ante una peticin de ca-bio instan
t1neo en la posicin deseada de la articulacin (qd(#) = lis) se tendra
)( k, )
- k +-' +k #
q(s) =) 9(s) = # p # d
s9(s)"($s"%)s ( k ) ( )
kp "."kds " $s"% #
#
!'(<<&
9esultando que q(t) y qd(t) no coinciden salvo, suponiendo el siste-a estable, en el valor +inal
( t ---7 == ) en el que q vale ), coincidiendo con la entrada(
Control dinmico 197
En definitiva, el control PID permite anular el efecto de una posible perturbacin en escaln en r
gimen permanente, as como asegurar que finalmente q y qdcoinciden, sin embargo,no consigue que q
siga la evolucin de qda lo largo del tiempo.
7.1.3. Control PID con prealimentacin
Como se a visto, la utili!acin del control PID permite anular el efecto de la perturbacin en rgimen
permanente, as como conseguir que la salida q"t# alcance a la entrada pasado el suficiente tiempo. $in
embargo, sera deseable que ante una trayectoria de entrada qd"t#, la salida coincidiese con ella en todo
momento, consiguiendo no slo un error nulo en regimen permanente, sino tambin un error de
seguimientonulo.
Para conseguir tal efecto puede utili!arse un control PID con prealimentacin, basado en un preci
so conocimiento del modelo de la articulacin "% y &#. 'a (igura ).* representa el esquema de control
PID con prealimentacin, donde a la se+al de mando u se le a incorporado una prealimentacin de
velocidad y de aceleracin, siendo aora la ley de control,
u =-./01"s#e2"%s2&#sqd3
k.
con 1"s# 4 -p 256 2 -ds
$
0).783
9aciendo uso de la caracterstica tensin.par del actuador 0).)3 y del modelo din:mico de la arti
culacin 0).;3, se tendr:,
"%s2&#s
I
'tp
/
qd
2
e q
1"s#
<ccionamiento
t ="%s2 &#sq 26,,
<lgoritmo de control
<rticulacin
Figura 7.6. Esquema de algoritmo de control basado en PIOcon prealimentacin.
198 Fundamentos de robtica
t= ku = RCS)e+(JS+B)Sqct} ~
t= (Js + B)sq + 'lp
RCs)e+(Js+B)sqct =(Js+B)sq+'lp ~
(R(s)+(Js+B)s)e='lp ~
'lp
e = R(s) + (Js + B)s [7.24]
Como se obser!" ! #$%ere&c$! #e l! e'pres$(& [7.)*]" obte&$#! p!r! el error cu!&#o s(lo se ut$l$+!
co&trol ,-." el error obte&$#o co& el uso #e co&trol ,-. m/s u&! pre!l$me&t!c$(& #e !celer!c$(& 0
eloc$#!#" &o #epe&#e #e qct.1ue2o" s$ b$e& !&te prese&c$! #e perturb!c$(& el error se comport!r/
como e& el c!so !&ter$or (te&#$e&#o ! cero cu!&#o 'l3pes u& esc!l(&)" !&te u&! e&tr!#! e& qct"&o te&#r/
!lor !l2u&o" co&s$2u$4&#ose u& se2u$m$e&to !bsoluto #e l! tr!0ector$! #ese!#!" es #ec$r" q(t) = qct(t)
p!r! to#! l! tr!0ector$!.
.ebe !#ert$rse u&! e+ m/s" !&te el pos$ble opt$m$smo #e los result!#os !&ter$ores" que el se2u$5
m$e&to !bsoluto #e l! tr!0ector$! #ese!#! qct(t)!&te !use&c$! #e perturb!c$(& se co&se2u$r6! solo s$ J"
B 7k %uese& per%ect!me&te co&oc$#!s. 8& l! pr/ct$c!" 9!br/ que co&%orm!rse co& te&er u&! bue&!
est$m!c$(& #e estos !lores 0 !#m$t$r c$ert!s #es$!c$o&es e&tre q 0 qct.
7.1.4. Control PD con compensacin de gravedad
Como se $o e& 7.).2" el co&trol ,-. !se2ur! que !&te perturb!c$(& se !&ul! el error e& r42$me&
perm!&e&te. S$& emb!r2o" #e us!r s(lo u& re2ul!#or ,. &o se co&s$2ue este e%ecto. ,or otr! p!rte" es
s!b$#o que l! $&clus$(& #e l! !cc$(& $&te2r!l (k:)&eces!r$! p!r! el$m$&!r el error e& r42$me& perm!&e&te"
t$e&#e ! empeor!r l! respuest! #$&/m$c! #e l! !rt$cul!c$(& (!#em/s #e te&er otros $&co&e&$e&tes" como
se er/ e& 7.4.2). ;!mb$4& e& 7.).< se 9! $sto c(mo l! pre!l$me&t!c$(& pue#e ser ut$l$+!#! p!r! el$m$&!r
el error #e se2u$m$e&to" s$empre que se te&2! u& bue& mo#elo #el s$stem!.
Recor#!&#o el esquem! prese&t!#o e& l! =$2ur! 7.)" se obser! que e& r42$me& perm!&e&te el t4r5
m$&o 'l3p#epe&#e s(lo #e l! 2r!e#!# (m!tr$+ C(q)) 0 ee&tu!lme&te #e perturb!c$o&es !le!tor$!s"
puesto que q y q so& &ul!s e& est! s$tu!c$(&.
8l co&trol ,. co& compe&s!c$(& #e 2r!e#!# s!c! p!rt$#o #e estos 9ec9os" &o ut$l$+!&#o l! !cc$(&
$&te2r!l p!r! !&ul!r el error perm!&e&te" s$&o u&! !port!c$(& >(q) que compe&s! el !lor 'tp e& r42$5
me& perm!&e&te. ?l ser el !lor >(q) #eb$#o t!& solo !l t4rm$&o #e 2r!e#!#" su co&oc$m$e&to 0
computo e& t$empo re!l es rel!t$!me&te s$mple. 1! =$2ur! 7.7 reco2e el esquem! #e co&trol corres5
po&#$e&te" e& el que !9or! R(s) es u& co&trol t$po ,." R(s) = k" + k# s" result!&#o l! le0 #e co&trol3
[7.2*]
Control dinmico 199
G(q) - - - - - - - - - - - - - - - - - -
'tp
e
Accionamiento
Algoritmo de control
Articulacin
Figura 7.7. Esquema del algoritmo de control basado en POcon compensacin de gravedad.
con lo que al considerar la relacin tensin-par del actuador [7.7] y el modelo dinmico de la
articulacin [7.8], se tiene:
't ku !(s)e " G(q)# =>
't($s"%)sq"'tp
!(s)e " G(q) ($s " %)sq " 'tp =>
(!(s) " ($s " %)s)e ($s " %)&qd " 'tp - G(q) =>
($s " %)&qd " 'tp - G(s)
e !(s)"($s"%)s [7.'(]
&uponiendo que el ro)ot se encuentra parado, esto es, que *lqd + , se tendr:
. 'tp - G(q)
i\e( , , ) = lim s- ___!__ _!___!._
.+ !(s) " ($s " %)s
[7.'7]
&i en r/gimen permanente 'tp 0iene dado slo por los e1ectos de la gra0edad 'tp e" se tendr que
para que el error permanente sea nulo:
200 Fundamentos de robtica
G(q) = 'tp = C(q) [7.28]
Por lo tanto, una compensacin calculada a partir de los trminos de ra!edad, permitir" utili#ar un
controlador P$ aseurando que el error permanente es nulo.
7.2. CONTROL MULTIARTICULAR
%a consideracin de que cada articulacin no se !e a&ectada m"s que por sus propias caracter'sticas
din"micas, siendo el e&ecto de las dem"s (representado por el par pertur(ador 'tp) poco sini&icati!o, no
es siempre acepta(le.
)rente a las tcnicas (asadas en el supuesto desacoplamiento de las articulaciones, las tcnicas de
control acoplado contemplan el modelo din"mico real del ro(ot, *aciendo uso del conocimiento del
mismo para tratar de desacoplar el sistema.
7.2.1. Desacoplamiento por inversin del modelo
Considerandouna !e# m"s el modelo din"mico del ro(ot, inclu+endo esta !e# un posi(le par e,terior 'te-
't = D(q)q +H(q,q) +C(q) +FA +'te = D(q)q +N(q,q) +'te [7.2.]
donde en N(q,q) se *an incluido todos los pares distintos del de inercia (Coriolis, ra!edad, ro#amiento,
etc.).
Para desacoplar este modelo puede recurrirse al esquema representado en la )iura 7.8, en el que
la tensin de mando de los actuadores u se o(tiene a partir de la se/al i + de las matrices D(q) +
N(q,q) , siendo-
't=KU=[D(q)i+N(q,q)]} ~
't = D(q)q +N(q,q) +'te
i =q0$1'(q)'te [7.23]
4esultando que el esquema de la )iura 7.81a equi!ale al de la )iura 7.81(, en el que se o(ser!a
que en ausencia de par e,terno 'te, la relacin entre i y q es desacoplada y lineal.
5na !e# desacoplado el sistema, es sencillo calcular el par i necesario para seuir la tra+ectoria
deseada qd. 6astar" para ello con que i = 7 id = 8 29 qd, con lo que-
Control dinmico 201
Robot
,
' t e
n-1(q)
r
-
1
q..
- ' " " ' - - ' "
821
+
, . .
. .
illS:'1';'Y"U!>';;, m. w
N(q,cj)
't =D(q)ij +N(q,q) +'t.
b)
a)
Figura 7. 8. Desacoplamiento por inversin del modelo.
[7. 31]
omo !" ob!"#$a, "% a&!"%'ia (" )a# "*t"#io# 't" !i i + 'i( ' la t#a,"'to#ia ("!"a(a -( y la #"al 'oi%.
'i("%. /o# lo ta%to, la l", (" 'o%t#ol 'o##"!)o%(i"%t" al m0to(o (" ("!a'o)lami"%to ("l mo("lo !&)o.
%" -&" la t"%!i1% (" ma%(o a )#o)o#'io%a# a lo! a''io%ami"%to! !"a 23i4&#a 7. 5):
[7. 32]
N(q,q)
6''io%ami"%to , 7777
6l4o#itmo (" 'o%t#ol
't + D(q)ij + N(q,cj) + 't"
Figura 7. 9. Esquema de algoritmo de control asado en desacoplamiento por inversin del modelo.
202 Fundamentos de robtica
7.2.2. Control PID con prealimentacin
Una vez conseguido independizar dinmicamente el movimiento de las articulaciones del robot, cabe
aplicar cualquiera de las tcnicas de control presentadas en 7.1 para el caso de ejes independientes. En
concreto, la presencia de perturbaciones 'te aleatorias no modeladas, e incluso las discrepancias entre los
valores reales y los estimados en las matrices Dy N, pueden ser en cierta medida compensados con el
clsico esquema de control P!.
En el diagrama de bloques de la "igura 7.1#, todas las variables son vectores de dimensi$n n y el
bloque %&s' es una matriz diagonal &n ( n' de reguladores tipo P!)
*it
+ + *p1,-,*d1.
.
*.,
%&s' /
+ *p0 , 111./-. , *d0s +
27.334
- . -
+
+ +
k,
*pn ,-,*dns
.
Este diagrama es equivalente al de la "igura 7.5 a6adiendo un bucle P!, resultando similar, tal 7
como se 8a justi9icado en 7.2.1, al de la "igura 7.11. En l se veri9ica)
i/ s2:d ,%&s'e ; 2 0
< = = = > 't = D(q) s-:d +R(s)e]+N(q,q)
't / D(q)'t +N(q,q)
27. 3>4
%obot
N(q,q)
:
+
%&s'
,/ D(q)ij +N(q,q) +'e
<lgoritmo de control
"igura 7.10. Esquema de algoritmo de control basado en P+ 7 prealimentacin sobre
el sistema desacoplado.
Control dinmico 203
' t e
D-l(q)
~
i : i d
1 ' "
. .
s21
,
,
,,.+ i , -
qd
+ e
1
, q
~~
,," 1""\
,
R(s)
s 2 1
,
lo
,
, ,. . .
1'- + +
Figura 7.11. Es quema de algoritmode control bas adoen PIO !realimentaci"n s obre
el s is tema des aco!lado.
Por otra parte, el mod elo d i nmi co d el robot [7. 29], establece !e:
[7. "#]
$%!aland o las ec!aci ones [7. "&] [7. "#] se obti ene:
'()[s2$(d ) R(s) e] #'()s2$ ) ' te * +
'()[s2$)R(s)]e * ' te * +
,-presi .n !e pone d e mani /i esto !e la !ti li 0aci .n d e re%!lad ores P$' preali mentaci .n d e ace1
$eraci .n i nd epend i ente por cad a e2e, 2!nto con el d esacoplami ento por la i n3ersi .n d el mod elo d a l!1
%ar a !e:
1 . ,n a!senci a d e pert!rbaci ones (' te * 4)el error es si empre n!lo 5, por tanto, * 6 i d .
2. 7nte !na pert!rbaci .n en /orma d e escal.n (t, #l8s), el error en r9%i men permanente se an!la.
e(: : ) #li m s[ s21 ) R(s) r';1 (q) 1 . #li mR(s) ;1 ';1 (q) * 4
s<o S s<o
[7. "7]
204 Fundamentos de robtica
puesto que:
1
o
[7.38]
o
1
o o
R(S)-l = S
kp2s+ki2 +kd2S2
O
O
1
O
De la expesi!" [7.3#] $ %o"sidea"do la ela%i!" popo%io"al e"te la te"si!" de &a"do del &oto
y el pa popo%io"ado po 'ste( se tie"e:
[7.3)]
sie"do 'sta la de"o&i"ada le$ de %o"tol que esta*le%e el %+l%ulo del pa que de*e eali,a la u"idad de
%o"tol paa -i.a las %o"si/"as de pa de los a%tuadoes.
0a e1alua%i!" e" tie&po eal de la expesi!" [7.3)] puede se ex%esi1a&e"te %ostosa. 2" o%asio3
"es( $ %o"sidea"do que las 1elo%idades q de las ati%ula%io"es "o so" &u$ ele1adas (del ode" de
&edia 1uelta po se/u"do) puede si&pli-i%ase su %+l%ulo despe%ia"do el e-e%to de la &ati, 4( q, tj)
$ de la &ati, 5( (q)q so*e el t'&i"o N(q,tj) que e"to"%es %oi"%idi+ %o" la &ati, de /a1edad
C(q).
0a expesi!" [7.3)] es el %aso /e"eal de %o"tol po par calculado $ se/6" se %o"sidee" o "o
%ietos t'&i"os( se te"d+" di-ee"tes %asos pati%ulaes.
7.3. CONTROL ADAPTATIVO
7o&o se 8a 1isto e" el ep9/a-e a"teio( si se %o"o%e pe-e%ta&e"te el &odelo di"+&i%o del o*ot( es
posi*le utili,a la t'%"i%a de desa%opla&ie"to po i"1esi!" del &odelo paa( e" ause"%ia de
petu*a%i!"( %o"se/ui que la ta$e%toia eal %oi"%ida exa%ta&e"te %o" la deseada.
Si" e&*a/o( e" la p+%ti%a esta t'%"i%a tie"e u"a apli%a%i!" li&itada( *ie" poque los pa+&etos
que de-i"e" el &odelo (i"e%ias( o,a&ie"tos( et%.) "o so" %o"o%idos %o" pe%isi!"( o *ie" poque el
%+l%ulo %o"ti"uo e" tie&po eal del &odelo i"1eso es ex%esi1a&e"te le"to.
0a t'%"i%a del control adaptativo se puede apli%a %o" *ue"os esultados e" aquellas o%asio"es e"
las que el &odelo( au" sie"do %o"o%ido( %a&*ia %o"ti"ua&e"te po %a&*ia las %o"di%io"es de -u"3
%io"a&ie"to. 0a idea *+si%a del %o"tol adaptati1o es &odi-i%a e" tie&po eal los pa+&etos que
Control dinmico 205
definen el regulador (PID por ejemplo) de acuerdo al comportamiento instntaneo del sistema
[RODRIGUEZ-96].
En el caso de un robot, es evidente que el comportamiento del sistema, y por lo tanto el modelo del
mismo, cambia con los valores de sus variables articulares y con la carga que transporta. De este mo
do, supuesto que se ubiese ajustado adecuadamente un controlador para unas condiciones determi
nadas de locali!aci"n del robot y carga manipulada, este ajuste no ser#a vlido cuando alguna de estas
condiciones cambiase.
$ucos robots industriales tienen un %nico controlador ajustado para unas condiciones interme
dias de funcionamiento y asegurando que los movimientos del robot se mantienen estables en otras
condiciones, aunque con su calidad disminuida (tiempo de establecimiento, oscilaci"n, precisi"n,
etc.). &a utili!aci"n de la t'cnica de control adaptativo permite reajustar los parmetros del regulador
cada ve! que el comportamiento del robot se modifica, de modo que los movimientos de 'ste se apro
(imen siempre a las especificaciones deseadas.
E(isten diferentes esquemas de control que entran dentro del concepto de control adaptativo. En
todos ellos se utili!an procedimientos de identificaci"n de los parmetros del modelo del sistema y
algoritmos de clculo de los parmetros del regulador.
El control por planificaci"n de ganancias puede ser considerado como un caso simple de control
adaptativo, en el que un n%mero determinado de reguladores estn precalculados para diferentes con
diciones de funcionamiento. )eg%n se detecta que 'stas se modifican se conmuta de un regulador a
otro.
El control adaptativo con modelo de referencia reali!a una comparaci"n en l#nea entre el compor
tamiento del sistema real y el deseado. El error entre ambos comportamientos se utili!a para modificar
los parmetros del regulador.
El control adaptativo autoajustable identifica continuamente el modelo del sistema y utili!a alg%n
algoritmo de dise*o para ajustar los parmetros del regulador. +omo caso particular de 'ste se co
mentar el control de par calculado adaptativo.
7.3.1. Control adaptativo por planificacin de ganancias (GS)
En el m'todo de planificaci"n de ganancias, una ve! seleccionado el tipo de control a utili!ar (por
ejemplo PID con prealimentaci"n de aceleraci"n independiente por cada eje) se ajustan los parmetros
del mismopara un n%mero determinado de condiciones de funcionamiento.
&as variables que acen que estas condiciones de funcionamiento se modifiquen son la carga que
manipula el robot y los valores de las coordenadas articulares. Durante el funcionamiento, los valores
de las coordenadas articulares son conocidas por la unidad de control del robot (ya sean las deseadas,
generadas por el control cinemtica, o las reales, obtenidas por los captadores de posici"n). ,simis
mo, la carga puede ser conocida, bien porque el programa del robot incluya instrucciones que permi
tan la especificaci"n de la misma, bien porque el e(tremo del robot cuente con un sensor adecuado o
bien porque se incluyan algoritmos que permitan calcular la carga a trav's del comportamiento de
magnitudes f#sicas del sistema (intensidad de accionamientos el'ctricos, presi"n diferencial en i
drulicos, etc.) [PAUL-81- .
+on estos datos, el algoritmo de planificaci"n de ganancias ace uso de una tabla en la que estn
especificados los parmetros de los reguladores a utili!ar para cada uno de los grados de libertad. En
206 Fundamentos de robtica
el caso de que el punto de funcionamiento no coincida exactamente con las entradas a la tabla, puede
utilizarse alguna tcnica de interpolacin.
Debe considerarse que en el caso general de un robot de 6 grados de libertad se tendra hasta 7 va
riables a ir modificando para establecer las diferentes condiciones de trabao. !sto puede dar lugar a
un n"mero excesivo de puntos de funcionamiento #, por lo tanto, de reguladores distintos. $%&, supo
niendo que cada grado de libertad tuviese un recorrido de '()*, discretizados en intervalos de '+*, #
que la carga variase de ,a +) -g, discretiz.ndose en intervalos de + -g, se tendra que el n"mero de
puntos de funcionamiento distintos a considerar sera/
+) 0'()16 7
2. 2 3 4.5(+(567')
+ '+
$ la vista de este resultado se conclu#e que no es posible realizar la citada discretizacin. 8ara
disminuir el n"mero de modelos diferentes puede comenzarse por hacer las siguientes consideracio
nes/
'. 9os movimientos de los "ltimos : grados de libertad, destinados a orientar el extremo del robot,
suponen peque;as variaciones en la din.mica del robot, por cuanto las longitudes de las corres
pondientes articulaciones 0par.metro d en los par.metros D2<1 son reducidas.
4. !n muchos robots, como es el caso de los articulares, el valor del primer grado de la libertad
est. en un plano perpendicular a los dem.s. !so origina que el efecto de su movimiento sobre
los dem.s sea mnimo, especialmente si las velocidades de movimiento no son elevadas.
x
Figura 7.12. Robot articular de 3 grados de libertad.
Control dinmico 207
Adems, un adecuado estudio del robot permite combinar los ejes para disminuir el nmero de en
tradas a la tabla. As, en el robot articular de la Figura 7.12, la dinmica del eje 1 se ve afectada por
una funcin de la masa reducida MI de los eslabones 2, ! "masa manipulada M) # de la distancia d$
de la masa reducida al eje de giro del grado de libertad 1, cu#o valor es%
reduci&ndose as el nmero de entradas a la tabla.
'el mismo modo, el eje ! por ejemplo, vera afectada su dinmica por una funcin de la masa re
ducida ( ! del eslabn ! # masa manipulada ( ) # de la distancia d2 de &sta al eje de giro del grado de
libertad, reduci&ndose del mismo modo el nmero de entradas a la tabla. *onsideraciones similares
pueden +acerse sobre los dems ejes.)
,n segundo problema a considerar en la utili-acin de un control por planificacin de ganancias
es, .ue si bien para los puntos de funcionamiento deseado se tiene asegurado la estabilidad # buen
funcionamiento del sistema con estas premisas se +a dise/ado el regulador), para puntos intermedios,
distintos de los considerados, no est garanti-ada ni si.uiera la estabilidad.
0ste problema puede ser tratado de manera terica con t&cnicas similares a las utili-adas en control
robusto 1A2345( 6789, o bien de manera ms prctica reali-ando un nmero amplio de pruebas en dife
rentes condiciones de funcionamiento.
:a Figura 7.1! representa el es.uema de funcionamiento de un control monoarticular con algorit
mo ;<' # prealimentacin de aceleracin usando una planificacin de ganancias. 3&ngase en cuenta
.ue la determinacin de los parmetros =a, =p, =, =d debe reali-arse para cada uno de los grados de
libertad sobre los .ue se desee reajustar el regulador.
*arga
q
6
-
3abla de ganancias
_ _ . .
= 2 ~
I a2 l~
I """"""'"
~
- -
-_/
.d
+ e
l. +
1%
>?
I
.
@A666B
=p -l1-' +=ds
. . 1"\
' "
~
' "
,
~-
I S
+
66
I
666666
____ J
T-
Figura 7.1!. Control monoarticular con planificacin de ganancia.
7.!.2. *ontrol adaptativo con modelo de referencia ( 4A*)
0n este tipo de control adaptativo se parte de un comportamiento ideal del sistema, definido por un
modelo de referencia la eleccin del mismo no es trivial). :a diferencia instantnea entre el
208 Fundamentos de robtica
qd
J ~
q'
I
Modelo de referencia
Algoritmo de
+
,
qe
.r
r
adaptacin
'-
I
-
,
,
I
qd ""
Algoritmo
't
_r
q
'de
""
""
".. ,
,..
"..
pontrol
,
Figura 7.14. Funcionamiento de un controlador MRAC.
comportamiento real del robot q y el modelo deeado q' e utili!a para calcular lo par"metro del
controlador utili!ado.
#a Figura 7.14 repreenta el funcionamiento de un controlador M$A%. Junto con el bucle de con&
trol normal, dibu'ado en tra!o grueo, aparecen otro bloque que componen el control adaptati(o. )l
algoritmo de control puede er cualquiera de lo preentado en la eccione anteriore. A*, el algo&
ritmo de adaptacin podr*a calcular lo par"metro del control +,- para cada punto de funcionamien&
to.
#a principal dificultad en la implantacin de ete tipo de control radica en la eleccin del algorit&
mo de adaptacin que aegure la etabilidad y correcto funcionamiento del itema. .ormalmente,
ete algoritmo utili!a t/cnica como la del gradiente o del deceno m" profundo 01A23,.)#-745 para
minimi!ar el error qe entre el comportamiento del itema real 6 del modelo de referencia.
-e nue(o, el an"lii terico de la citada etabilidad e comple'o, por lo que en la pr"ctica e fre&
cuente conformare con un comprobacin e7perimental del comportamiento del itema. )tudio m"
detallado obre el control adaptati(o con un modelo de referencia y u aplicacin para robot, pueden
encontrare en 0A23$8M-9:5, 0%$A,1-995 y 0;8,<8-9=5.
7.=.=. Control de par calculado adaptativo
)n el ep*grafe 7.> e e7amin la t/cnica de deacoplamiento por in(erin del modelo, en la cual el
conocimiento de la matrice - 6 . del modelo din"mico del robot permit*an aplicar una le6 de control
de la forma 07.=:5?
07.4@5
Control dinmico 209
consiguindoseque la evolucin de las articulaciones respondiera a [7.36]:
[7.41]
Esto es, en ausencia de perturbaciones, coincidan la traectoria deseada qd la real q. Y en pre!
sencia de perturbaciones de tipo escaln, el error "e # qd- q) tendera a cero [7.37].
$os proble%as de este %todo surgen por una parte de la di&icultad de calcular en tie%po real la
e'presin [7.4(] del par por otra parte, del di&cil conoci%iento preciso del %odelo din)%ico del
robot "%atrices D N), que ade%)s de variar con la locali*acin q del robot, depende de ciertos pa!
r)%etros, co%o %asas, inercias o ro*a%ientos, de di&cil obtencin.
El par calculado adaptativo trata de resolver este proble%a con una identi&icacin para%trica en
lnea de las %atrices + ,. +e este %odo, el esque%a de control presentado en la -igura 7.1( se con!
vertir) en el de la -igura 7.1.. +e nuevo, las di&icultades aparecen a la /ora de asegurar la estabilidad
del siste%a de su i%plantacin en tie%po real. En concreto, la convergencia del algorit%o de identi!
&icacin no est) asegurada, por cuanto que los valores que to%an las se0ales qd q no est)n seleccio!
nados con vistas a la identi&icacin del %odelo, sino que son consecuencia de las tareas enco%enda!
das al robot.
1si%is%o, el c)lculo en tie%po real de las %atrices D Nes e'tre%ada%ente laborioso. 2n estu!
dio detallado de la tcnica de control por par calculado adaptativo sus variantes puede verse en
[$E345673].
+
8"s9 .
1 _
1
1 qd
~ +
1 1
q 1
~----------- I
1lgorit%o
de
identi&icacin
Figura 7.15. Esquema de control por par calculado adaptativo.
210 Fundamentos de robtica
7.4. ASPECTOS PRCTICOS DE LA IMPLANTACIN DEL REGULADOR
Los algoritmosde control anteriormente expuestos, superadas sus limitaciones tericas como robustez y
convergencia, parecen prometedores por cuanto aseguran el objetivo de que la trayectoria deseada del
robot se aproxime en mayor o menor grado a la real. Sin embargo, la implantacin prctica de estos
algoritmos se encuentra con diferentes tipos de problemas, que en algunas ocasiones dificultan y
complicansu puesta en marcha o incluso anulan completamente su utilidad.
La primera dificultad, ya citada, se deriva del elevado coste computacional implicado en el clculo
de alguno de ellos. As, en general, las t!cnicas de inversin del modelo "con m!todos adaptativos o
no# precisan de la obtencin en tiempo real de las matrices $ y %. &n algunos casos, la reciente po'
tencia de los equipos de clculo utilizando procesadores digitales de se(al "$S)# o t!cnicas de proce'
samiento en paralelo "transputer#, resuelven este problema.
Se van a tratar aqu otro tipo de dificultades, comunes en general a cualquier sistema de control
discreto y que se centran en la implementacin de las t!cnicas ms bsicas, como es la del control
)*$.
7.4.1. Ajuste de los pa!"etos del PID. Espe#$%$#a#$o&es de d$se'o
&n cualquierade las t!cnicas de control establecidas a lo largo de los epgrafes anteriores, se planteaba la
existencia de un control )*$ cuyo objetivo era que, a+n con la presencia de posibles perturbaciones, el
error entre la trayectoria deseada y la real convergiese a cero de la manera ms rpida.
&ste regulador tena la forma estndar dada por la expresin,
-../01
quedandopor decidir los valores concretos de las constantes proporcional 2p, integral 23 y derivativa 4.
La seleccin de estos parmetros afectar al modo en que el robot alcanza su posicin final al va'
riar la referencia de !sta o al recibir una perturbacin que trata de modificarla [PAUL-81]. &n el caso
simple del control monoarticular, el modelo del robot responde al esquema de la 5igura ..6.
Suponiendo que se utilicen las tres acciones del regulador )*$ "i.e. 2p, 2., 4 distintas a cero# la
funcin de transferencia del regulador podr suponerse de la forma,
"#
"s7a#"s7b#
8s92
r s
-../:1
La 5igura ..;< representa el lugar de las races del sistema global. La eleccin adecuada de los ce'
ros a y b y de la ganancia 2, "lo que equivale a seleccionar las constantes 2p, 2, 4# se har de acuerdo
Control dinmico 211
Figura 7.16. Lugar de las races de una articulacin con control PID.
a las especificaciones de funcionamiento. En los sistemas de control se busca habitualmente una res
puesta lo ms rpida posible, admitiendo cierto grado de sobreoscilacin.
Con estos criterios se selecciona una posicin para los polos dominantes del sistema y se ajustan
los valores de la ganancia k, y del cero b para tal fin [PUENTE-79], [!T!-9"] y [#!$$IENT%-9&]. La
posicin del cero a se selecciona de modo que compense el efecto desestabilizador originado por el
polo en el origen introducido por la accin integral. En el caso de robots, si bien se persigue la mi
ma velocidad de respuesta, no es admisible la sobreoscilacin por cuanto !sta podr"a originar la coli
sin del robot con su entorno #consid!rese, por ejemplo, el caso de que el robot se acerque a un objeto
situado sobre una mesa$. %or lo tanto, la posicin de los polos dominantes debe escogerse buscando
que el sistema sea cr"ticamente amortiguado #punto p del lugar de las ra"ces$
&uponiendo inicialmente que slo se utilizan acciones %', se tendr que el polinomio caracter"sti
ca del sistema ser #mediante deduccin de la epresin ().**+$,
().--+
correspondiente a un sistema de *. orden con coeficiente de amortiguamiento/ y frecuencia natural ' n
dados por,
().-0+
%ara que el sistema sea cr"ticamente amortiguado, el coeficiente de amortiguamiento / deber ser
la unidad y por tanto,
212 Fundamentos de robtica
[7.46]
Por otra parte, si bien se ha considerado que la estructura del robot es rgida, en realidad sta ten
dr una determinada fleibilidad estructural caracteri!ada por una frecuencia de resonancia estructural
" # r. $n [PAUL-81] se aconse%a e&itar que el sistema se &ea ecitado por una frecuencia cercana a ' ( # ) ., por
lo que la frecuencia natural del sistema regulado deber ser inferior a la mitad de ' * r. $sto es(
[7. 47]
+as epresiones [7.46] , [7.47] establecen - condiciones que, supuestos conocidos ., / 0' * r, per
miten seleccionar en primera aproimaci1n las constantes proporcional 2p, deri&ati&a 2d del regula
dor. 3n a%uste ms preciso de las mismas deber reali!arse por ensa,o , error. $n cuanto a la cons
tante integral, como es bien sabido, tiene por ob%eti&o anular el error permanente ante cambios brus
cos 4en escal1n5 en la perturbaci1n 6tpo en qd. 7i bien cualquier &alor de 2) distinto de cero conseguir
este ob%eti&o 4&er epresi1n [7.87]5 una inadecuada selecci1n de la misma, cambiara radicalmente los
logros obtenidos con el a%uste de k,, 9 4referidos a 9 , :l) ,5, por cuanto la acci1n integral introduce
una pare%a polo;cero en el sistema, que de%ar de comportarse como un sistema de -< orden puro.
7.4.2. Saturacin de los amplificadores. Efecto de la accin integral
=ne&itablemente,los amplificadores o dispositi&os electr1nicos destinados a suministrar la potencia a los
actuadores 4elctricos o hidrulicos5 del robot, tienen un margen de actuaci1n limitado. >7?, aun en el
caso de comportamientoideal en el que la salida de la etapa de potencia o amplificador es proporcional a
la se@al de consigna, esta proporcionalidad es &lida :nicamente entre unos &alores etremos mnimo ,
mimo, superados los cuales la salida del amplificador se mantiene constante e independiente de la
7alida "t
Figura 7.17. Relacin entre entrada , salida de un amplificador con saturaciones.
Control dinmico 213
*
qd
+ e
u 't
1
q
o - - - .
PID
; - +1 k'
~
1 . . .
. .
s(Js+B)
J -
0=
~. . - -
Amplificado r
Fi!ra ". #$. Control PIO monoarticular con saturacin en el amplificador.
e%trada' (Fi!ra ". #"). &o mo se 'a (isto e% lo s ep)rafes a%terio res* lo s es+!emas de co %tro l !tili,ado s
para reali,ar el co %tro l de las artic!lacio %es del ro -o t* !tili,a% de ma%era e%eral el erro r e%tre
tra.ecto ria deseada . real para o -te%er la se/al de ma%do * +!e ser0 e%trada de la etapa de po te%cia +!e
alime%ta a lo s act!ado res.
1a prese%cia de erro res ma%te%ido s* 2!%to a la !tili,aci3% de la acci3% i%teral* p!ede o rii%ar +!e
la se/al de ma%do para lo s amplificado res s!pere lo s l)mites del co mpo rtamie%to li%eal* sie%do e%to %4
ces la se/al de marido a lo s act!ado res co %sta%te* i%depe%die%te del erro r +!e se te%a e% ese mo 4
me%to . P!ede decirse e%to %ces +!e el sistema %o !tili,a la realime%taci3%* p!es la se/al de ma%do
perma%ece co %sta%te i%depe%die%teme%te de la salida.
50s a6%* a!%+!e la po sici3% real + i!alase o i%cl!so s!perase a la deseada +d .* po r lo ta%to * el
erro r f!ese %!lo o %eati(o * la acci3% i%teral del re!lado r 'ar)a +!e s! salida se ma%t!(iese d!ra%te
cierto tiempo e% !% (alo r po siti(o s!ficie%teme%te ele(ado co mo para +!e la se/al de ma%do del ac4
t!ado r f!ese la m07ima co rrespo %die%te a la sat!raci3%. 83lo c!a%do el erro r se ma%t!(iese %eati(o
d!ra%te !% tiempo s!ficie%teme%te laro * el amplificado r e%trar)a e% s! ,o %a li%eal. 9ste fe%3me%o *
de%o mi%ado e% la literat!ra e% le%!a i%lesa wind-up, o rii%a ma.o res o scilacio %es e% la po sici3%
real +* tarda%do m0s e% esta-ili,arse.
1a Fi!ra ". #$ represe%ta el caso simple de co %tro l PID mo %o artic!lar e% el +!e el amplificado r de
a%a%cia k prese%ta !%a sat!raci3% caracteri,ada po r lo s (alo res m07imo . m)%imo de s! salida
(5A: . 5I;* respecti(ame%te). 9% la Fi!ra ". #< . Fi!ra ". =0se represe%ta la salida + . el par
pro po rcio %ado #>* respecti(ame%te* para lo s caso s de sistema si% sat!raci3% . sistema co % !%o s l)mites
de sat!raci3% dado s po r 5A: =+# . 5I; =- #. 9% am-o s caso s se 'a to mado k=#* J =# . B ==0.
9l re!lado r PID se 'a fi2ado a>
1
?(s) =#+4
s
* 9% la pr0ctica este co mpo rtamie%to %o es li%eal %i ta% si+!iera e%tre lo s (alo res m07imo s y m)%imo s* e7is4
tie%do ,o %as m!ertas* 'ist@resis . o tras %o li%ealidades.
214 Fundamentos de robtica
2
amplificador
sin saturacin
amplificador
/ con saturacin
O'~------~IOrO---------2TOO--------3~0-0--------~t
Figura 7.19. Comparacin de respuesta con y sin saturacin en amplificador.
sin incluir la accin derivativa, que agrava notoriamente el efecto de la saturacin por cuanto provoca
valores de seal elevados a la salida del regulador. Se observa en ellas cmo la saturacin origina
mayores oscilaciones en q y un mayor tiempo en alcanzar el valor final. Tambin se observa como el par
de mando1: permanece dentro de su comportamiento no lineal durante buena parte del tiempo.
!isten en la pr"ctica diversas tcnicas para evitar las consecuencias derivadas del funcionamiento
de la saturacin del amplifiacador #$ST%&'()*+. ,osiblemente, el m"s utilizado en sistemas de regula(
-
2
amplificador
sin saturacin
/
amplificador
Icon saturacin
o
-2
IDO 200 300
Figura 7.20. Comparacin entre el par 1: proporcionado por un amplificador con y sin saturacin.
Control dinmico 215
+
u
MAX~
~
+
Figura 7.21. Control monoarticular con regulador PID antiwind-up.
cin de posicin y en particular en robtica, es el de anular la accin integral hasta que el error entre q
y qdno entre dentro de los lmites establecidos, esto es, se est llegando a la posicin de destino.
Otra alternativa es la mostrada en la Figura 7.21. l sistema mostrado, conocido como regulador !"
con antiwind-up, corta la accin integral en cuanto se satura la salida del integrador [FRANKLIN-91].
#ambin una modi$icacin en el esquema de control !"% perinite reducir las ocasiones en las que
el ampli$icador se satura. &s, cuando se produce un cambio brusco entre la posicin deseada y la real
'cambio de consigna, por e(emplo), la accin proporcional y muy especialmente la derivativa, origi*
nan a la salida del regulador $uertes acciones de control que pueden originar la saturacin del ampli$i*
cador. !ara evitar esta circunstancia puede recurrirse al esquema de control de la Figura 7.22 denomi*
nado "+!% [!A"A- ,-.. n este esquema, las acciones proporcional y derivativa se han pasado a la
realimentacin, siendo la $uncin de trans$erencia 'mientras se traba(a en la /ona lineal) entre la posi*
cin real y la deseada0
k
1 q1 2 s1 ) 1 s
'3s +#$s +% &' +45 +&d s)
67.78.
que como se observa di$iere en el numerador de la correspondiente $uncin de trans$erencia entre q y qd
para el caso de regulador !"% 'ecuacin 67.21.), teniendo el mismo polinomiocaracterstico.
n general el control "+!% disminuye el problema de la saturacin, pero da lugar a respuestas m9s
lentas.
216 Fundamentos de robtica
*
!
+ e +
u r
q
qd
~
_1_ r
k1 _ p
. .
1
s
,
s(Js+B)
~
j
-
- -=="
Mm
~,~~. .,.. -"",. .
~+kdS
Figura 7.22. Controll-PD monoarticular.
7.4.3. Flexin y oscilaciones estructurales
Como se ha indicado en el epga!e ". #. 1, la !le$i%ilidad es&'c&'al de los esla%ones ( a&ic'laciones del
o%o& p'eden oigina oscilaciones no desea%les. )s&as oscilaciones no p'eden se en pincipio &a&adas
po el sis&ema de con&ol, po c'an&o, en geneal, no son medi%les al es&a los sensoes de posici*n
&picamen&e si&'ados en las a&ic'laciones ( no a lo lago de los esla%ones. )n el caso de o%o&s de
gandes dimensiones o de es&'c&'a ligea, es&e po%lema pasa a 'n pime plano, siendo necesaio
considea la !le$i*n es&'c&'al &an&o a ni+el de con&ol cinem,&ica como din,mico -./.01S-234.
)$is&en di+esas &5cnicas des&inadas a dismin'i los e!ec&os de la !le$i*n ( las oscilaciones es&'c6
&'ales. .lg'nos de ellos pecisan de la '&ili7aci*n de sensoes si&'ados !'ea de la a&ic'laci*n, (a sea
a lo lago del esla%*n o en el e$&emo del o%o& (a es&os sensoes se les denomina no colocados). 8a
medida popocionada po es&os sensoes se '&ili7a paa genea acciones de con&ol 9'e compensen
las oscilaciones de la es&'c&'a. :e manea al&ena&i+a o complemen&aia, se p'ede &a&a de e+i&a, o
c'an&o menos dismin'i, el po%lema en s' oigen, e+i&ando e$ci&a a los ac&'adoes del o%o& con
se;ales 9'e oiginen oscilaciones ( compensando a priori las !le$iones es&,&icas pe+is&as.
qd
+ e
'
u
't q
1
I
. . ~
k1
. .
GM(s)
..
k
. .
PID
,
s(Js+B)
~-
............
'
<il&o de m'esca
.mpli!icado .&ic'laci*n
del o%o&
Figura 7.23. Control monoarticular con la inclusi!n d" un #iltro d" mu"sca.
Control dinmico 217
--------,-r1-r11-------r-_;:-.::.- :_:-'_'---r--"r-r-rT
, ,,
,,
o
--
,-..
fg
'-'
0:1
-10
u
o
-20
,
I I I I I I I
_____ L I l __ L_L_Ll
, ,
9 0 - - - - - - - t - - - - ~ - - t - - ~ - ~ - ~ 1 - ~ ~ - - - - - - - ~ - - - - ~ - - t - - ~ - ~ - ~ t ~
I I I I I I I I I I I I I I II
I I I I I I I I I II
I I I I I I I II
I I I I I I I II
I I I I I I I II
O I I I I _- - - - - - - ~ - - - - : - - - T - - : - - : - - : _ ~ - :
I I I I I I I I
I I I I I
I I I I I
I I I 1I
I I I II
I I 1 I I I I I I 1 I I I I II
_______ L L __ l __ L_L_LJ __ L L l l __ I__ L_Ll_I
- 9 0
10
Frecuencia (rad/s)
Figura 7.24. Diagrama de Bo de de un filtro de muesca.
Con ta !ro!"sito, #a se $an indicado ciertas reco%endaciones !ara a seecci"n de os !ar&%etros
de '(). O tra t*cnica +recuente es a utii,aci"n de un +itro a a saida de re-uador .ue ei%ine de a
se/a de %ando as +recuencias !r"0i%as a a de resonancia %ec&nica de siste%a. 1ste +itro, deno%i2
nado +itro de %uesca (o notchfilter) 34O 546-789 ori-ina una +uerte atenuaci"n en un estrec$o ran-o de
+recuencias. 1ste e+ecto se consi-ue %ediante e es.ue%a de contro de a Fi-ura :.2; (caso %onoarti2
cuar), en e .ue se $a incor!orado e +itro de %uesca <=(s)entre a acci"n de contro # a se/a de
%ando .ue +ina%ente e-a a siste%a de acciona%iento.
1ste +itro tiene t>!ica%ente !or +unci"n de trans+erencia:
3:.879
1s decir, se co%!one de dos ceros # de dos !oos, a%?os co%!e@os con@u-ados. Aa seecci"n de
co , # B se $ace de ta %odo .ue ln coincida con a +recuencia .ue se desea ei%inar (+recuencia de
resonancia estructura C Dr de a articuaci"n considerada). 1n cuanto a B,deter%ina a atenuaci"n in2
troducida a esta +recuencia, .ue to%a e Caor -20 o-(2B).
Aa Fi-ura :.28 re!resenta os dia-ra%as de Dode de un +itro de %uesca, !udi*ndose o?serCar e
e+ecto de +itro seectiCo conse-uido (se $a to%ado CO n E 1 # B E 0.0F).
218 Fundamentos de robtica
7.5. BIBLIOGRAFA
[AMARS-95] H. Amars, Modelado y control de la flexin de robots de grandes dimensiones, Tesis
Doctoral, DISAM, Universidad olit!cnica de Madrid, "995.
[ASTR#M-95] $.%. Astrorn & Ha''l(nd, PID Controllers: Theory, Design and Tuning, ISA, "995.
[ASTR#M-)9] $%. Astr*m, $.+. ,ittenmar-, Adaptie Control, Addison-,esle&, "9)9.
[+ARRI./T#S-90]A. +arrientos et al., Control de sistemas continuos! Problemas resueltos, Mc1ra2-
Hill, Madrid, "990.
[3RAI1-))] %%. 3rai', Adaptie Control of Mechanical Manipulators, Addison-,esle&, "9)).
[4RA/$5I/-9"]1.4. 4ran-lin, %.D. o2ell & A. .mami-/aeini, 6rinci7ios esenciales de la retroali-
mentaci*n6, Control de sistemas din"micos con retroalimentacin, Addison- ,esle&, "99".
[1ASTI/.5-85]/. 1astinel, An"lisis num#rico lineal, .ditorial Revert!, "985.
[$orvo-)9] A%. $oivo, Fundamentals for control ofrobot manipulators, %o9n ,ile& : Sons, "9)9.
[$orvo-);] A. %. $oivo, 6Ada7tive linear controller <or ro=ot mani7(lators6, I$$$ Transactions on
Automatic Control, A3->), 77. "0>-"8","9);.
[5.,IS-9;] 4.5. 5e2is, 3.T. A=dalla9 & D.M. Da2son, Control of %obot Manipulators, Macmillan
(=lis9in' 3o., /(eva ?or-, "99;.
[#1ATA-9;] $. #'ata, Ingenier&a de Control Moderna, @rentce-HalI His7anoamericana, >a ediA
ci*n,"99;.
[AU5-)"] R a(l, 6Static 4orces6, enB %obot Manipulators, Mathematics, Programming and Con'
trol, T9e MIT ress, Massac9(ssets, "9)".
[U./T.-89] ..A. (ente, %egulacin autom"tica (, Secci*n (=licaciones, .TSI Ind(striales, UniA
versidad olit!cnica de Madrid, Madrid "989.
[R#DRI1U.C-90]4. Rodr'(eD & M%. 5*7eD, Control adaptatio y robusto, Secretara de (=licacioA
nes de la Universidad de Sevilla, Sevilla, "990.
[R#HRS-9E] 39. .@ Ro9rs, %.5. Melsa & D.1. Sc9(ltD, 6DiseFo de sistemas de control6, enB )istemas
de control lineal, Mc-1ra2 Hill, "99E.
Captulo
8
PROGRAMACIN DE ROBOTS
Quien hace un cesto, har ciento.
Refranero popular
Un robot industrial es bsicamente un manipulador multifuncional reprogramable, siendo esta capacidad
de reprogramacin la que permite su adaptacin de una manera rpida y econmica a diferentes
aplicaciones.La programacinde un robot se puede definir comoel procesomediante el cual se le indica
a ste la secuenciade acciones que deber llevar a cabo durante la realizacinde sutarea. Estas acciones
consistenen sumayor parte en moverse a puntos predefinidos y manipular obetos del entorno.
!urante la eecucin de un programa se interacciona con la memoria del sistema, leyendo y
actualizandoel contenidode las variables utilizadas en el programa" con el sistemade control cinemtico
y dinmicodel robot, encargados de dar la se#al de mando a los accionamientosdel robot a partir de las
especificaciones del movimiento que se les proporciona" y con las entradas$salidas del sistema,
consiguindoseas% la sincronizacindel robot con el resto de las mquinas y elementos que componen
suentorno.
El sistemade programacines, por tanto, la herramienta con que cuenta el usuario para acceder a las
diversas prestaciones del robot, e&istiendo una relacin directa entre las caracter%sticas y posibilidades
del sistemade programaciny las del robot en s% mismo.
En los ep%grafes siguientes se comienza e&aminando los diferentes procedimientos e&istentes para la
programacinde robots, realizndose seguidamente una clasificacin de los mismos. ' continuacin se
analizan aquellas caracter%sticas propias de un sistema de programacinpara robots, y que les distingue
de otro tipo de sistemas de programacin, como son los de equipos informticos. Estos aspectos se
concretan posteriormente en un caso prctico de programacin de un robot industrial. (inalmente, se
describenbrevemente dos sistemas actuales de programacin de robots industriales) *'+,! de '-- y
./ de 'dept 0echnology.
219
220 Fundamentos de robtica
8.1. MTODOS DE PROGRAMACIN DE ROBOTS. CLASIFICACIN
Programarun robot consiste en indicar paso por paso las diferentes acciones (moverse a un punto, abrir o
cerrar la pinza, etc.) que ste deber realizar durante su funcionamiento automtico. La flexibilidad en la
aplicacin del robot y, por tanto, su utilidad depender en gran medida de las caractersticas de su
sistemade programacin.
!n la actualidad no existe normalizacin alguna en cuanto a los procedimientos de programacin
de robots. Por el contrario, cada fabricante "a desarrollado su particular mtodo, vlido #nicamente
para sus propios robots. $in embargo, existen algunos sistemas de programacin que "an servido de
modelo para el desarrollo de otros. %al es el caso del lengua&e 'L [FINKEL-74] desarrollado por la (ni)
versidad de $tanford en los a*os setenta y que "a servido de referencia para muc"os de los sistemas
comerciales existentes. %ambin es necesario indicar que, a pesar de la variedad de sistemas de pro)
gramacin existentes en el mercado, en todos ellos se dan una serie de caractersticas comunes y que
se explicarn con detalle en el epgrafe +.,.
Los escasos intentos de unificar en cierta medida los procedimientos de programacin de robots no
"an tenido "asta la fec"a el reconocimiento y la aceptacin necesarios. -e entre estos, tal vez el ms
destacable "aya sido el denominado ./-'%' [REMBOLD-85] (reconocido como estndar por la 0-r
alemana), concebido por la (niversidad de 1arlsru"e como un cdigo intermedio entre el sistema de
programacinutilizado y el propio sistema de programacin del robot.
!xisten diversos criterios para realizar una clasificacin de los mtodos de programacin de robots.
'lgunas atienden a la potencia del mtodo, mientras que otras clasificaciones "acen referencia al sistema
empleado para indicar la secuencia de acciones a realizar. !ste segundo criterio es ms ilustrativo a la
"ora de dar a conocer las alternativas existentes para programar un robot, siendo por esta razn el que se
va a seguir.
$eg#n este criterio, un robot puede ser programado mediante lo que se denomina guiado o mediante
un procedimieno textual existiendo robots que con&ugan ambos tipos. !ste primer nivel de divisin
admite un segundo, atendiendo a la potencia y particularidades del mtodo de programacin. Las
caracterticas de cada procedimiento de programacin sern ms o menos venta&osas seg#n la aplicacin
a la que se destina el robot.
8.1.1. P!og!a"a#i$% &o! guiado
La programacin por guiado o aprendiza&e consiste en "acer realizar al robot, o a una maqueta del
mismo, la tarea (llevndolo manualmente por e&emplo) al tiempo que se registran las configuraciones
adoptadas, para su posterior repeticin de manera automtica.
Para guiar al robot por las trayectorias o puntos deseados se utilizan diferentes soluciones. $i los
actuadores del robot estn desconectados y es el programador quien debe aportar directamente la energa
para mover el robot, se trata de un guiado pasivo. !n este caso, el programador puede tomar el extremo
del robot y llevarlo "asta los puntos deseados siguiendo las trayectorias ms adecuadas. La unidad de
Programacin de robots 221
Figura 8.1. Robots de pintura RI/93 (hidrulico) y RE/91 (elctrico) de programacin mediante
guiado pasivo directo (!ortes"a de #aiotto)
control del robot registrar, de manera automtica, la seal de los sensores de posicin de las
articulacionesen todos los puntos recorridos. Este tipo de guiado se denomina guiado pasivo directo. Un
ejemplo de robot industrial programado por este procedimiento se encuentra en los robots de pintura de
la firma Gaiotto (Figura 8.1.
!a dificultad f"sica de mover toda la estructura del robot se resuelve con la utili#acin del guiado
pasivo por mani$u". En este caso se dispone de un doble del robot mientras $ue %ste permanece fuera de
l"nea. El mani$u" posee id%ntica configuracin $ue el robot real, pero es muc&o ms ligero y fcil de
mover. !a programacin se efect'a llevando de la mano a este doble, mientras $ue la unidad de control
muestreay almacena, con determinada frecuencia, los valores $ue toman los sensores de posicin de las
articulaciones, para su posterior repeticin por el robot. !os robots, tambi%n de pintura, fabricados por
(ordson se programan utili#ando este procedimiento.
Frente a estos sistemas pasivos, otra posibilidad permite emplear el propio sistema de accionamiento
del robot, controlado desde una botonera o un bastn de mando (jo)stic* para $ue sea %ste el $ue mueva
sus articulaciones. +e dir entonces $ue se trata de un guiado activo. Ejemplos de este tipo se encuentran
en los robots de la antes ,+E, ) a&ora ,-- (,.!, o en los de /incinnati 0ilacron (12. En este
caso, lo &abitual es $ue la unidad de control 'nicamente registre a$uellas configuraciones del robot $ue
el programadorindi$ue e3presamente.
,tendiendoa la potencia del sistema, se puede &ablar de guiado bsico ) de guiado e3tendido.
222 Fundamentos de robtica
Guiado bsico: El robot es guiado consecutivamente por los puntos por los que se quiere que
pase durante la fase de ejecucin automtica del programa. Durante sta, la unidad de control
interpola dichos puntos segn determinadas trayectorias. En muchas ocasiones no es posible in
cluir ningn tipo de estructuras de control dentro del programa, por lo que los puntos son reco
rridos siempre secuencialmente, en el mismo orden en que se programaron. !n caso l"mite de
este tipo de programacin ser"a la utili#ada en casi todos los robots de pintura, en los que la
unidad de control muestrea automticamente los puntos recorridos por el robot con una fre
cuencia muy alta.
Guiado extendido: $ermite especificar, junto a los puntos por los que deber pasar el robot,
datos relativos a la velocidad, tipo de trayectoria, precisin con la que se desea que se alcancen
los puntos, control del flujo del programa, atencin a entradas%salidas binarias, etc. En este ca
so, el mtodo de guiado utili#ado es el de la botonera o joystic& '(igura ).*+. ,a programacin
por guiado e-tendido aumenta notablemente la potencia del sistema de programacin.
,os mtodos de programacin por guiado son muy tiles e incluso imprescindibles en muchas oca
siones. .dems presentan ventajas, como que son fciles de aprender y que requieren un espacio de
memoria relativamente peque/o para almacenar la informacin. 0in embargo, presentan una serie de
inconvenientes, de los que el ms destacable es la necesidad de utili#ar al propio robot y su entorno
para reali#ar la programacin, obligando a sacar al1robot de la l"nea de produccin e interrumpiendo
sta. 2tros inconvenientes frecuentes son la ine-istencia de una documentacin del programa y la
Figura 8.2. Botonera o paleta de programacin de un robot industrial.
(Cortesa de Yaskawa.)
3
Programacin de robots 223
dificultad de realizar modificaciones en el mismo, inconvenientes ambos que conducen a una difcil
depuracin y puesta a punto de las aplicaciones.
8.1.2. Programacin textual
Como alternativa a la programacin por guiado, el mtodo de programacin textual permite indicar la
tarea al robot mediante el uso de un lenguaje de programacin especfico. Un programa se corresponde
ahora, como en el caso de un programa general, con una serie de rdenes que son editadas y
posteriormenteejecutadas. xiste, por lo tanto, un texto para el programa.
!a programacin textual puede ser clasificada en tres niveles" robot, objeto y tarea, dependiendo de
que las rdenes se refieran a los movimientos a realizar por el robot, al estado en que deben ir quedando
los objetos manipulados o al objetivo #o subobjetivo parcial$ a conseguir.
n el estado actual, la programacin de robots se queda materialmente en el primero de ellos #nivel
robot$, existiendo una gran cantidad de lenguajes de programacin textual a este nivel [BONNER-82],de
entre los que se pueden destacar por orden cronolgico"
%&!
.&'!
%!'
.(&!))
.y*
%+&,)-
#Universidad de .tanford / 1974) [FINKEL-74].
(mM- 1979) [TAYLOR-82].
#Universidadde 0renoble, .C') / 1981) .
#U1)'&2)31/ 1983) [STABLI-92].
#&-,2/ 1989) [AOEPT-89].
(ABB -1994) [ABB-94].
.e han realizado diversos intentos de desarrollar lenguajes a nivel objeto [KOT!"#-81], pero las
dificultades con que se han encontrado los investigadores han impedido una implementacin eficiente
del lenguaje. Como ejemplos pueden citarse"
%!&'&
%&U23,&..
.+&,2
#')2 / 197$) [LO%ANO-7$].
(mM - 1977) [LIEBERMAN-77].
#Universidadde dimburgo / 1978) [POPPLESTONE-78] [AMBLER-8$].
,ara aclarar el modo en que se programara un robot en cada uno de los niveles anteriormente
mencionados, se va a resolver una tarea concreta utilizando las tres alternativas.
!a 4igura 8.3 representa el robot y su entorno. .e pretende situar la pieza &, sobre la que se apoya la
pieza 5, en el interior del orificio de la pieza -. & continuacin se presenta el programa en los tres
niveles de manera simplificada y utilizando lenguajes hipotticos.
% 1ivel robot" s necesario especificar cada uno de los movimientos que ha de realizar el robot,
as como la velocidad, direcciones de aproximacin y salida, apertura y cierre de la pinza, etc.
.er6 necesario tambin descomponer la tarea global en varias subtareas, como por ejemplo,
quitar B de A (poniendo B sobre C), introducir A en D, etc. ,ara el ejemplo que se est6 conside7
rando, la operacin que consiste en colocar 5 sobre C tendra el siguiente aspecto"
224 Fundamentos de robtica
B
Figura 8.3. Ejemplo de tarea de programacin.
Mover_a Pi via P2
Vel = 0.2 * VELMAX
Pinza = ABRIR
Prec = ALTA
Mover_recta_a P3
Pinza = CERRAR
Espera= 0.
Mover_recta_a Pi
Prec = ME!IA
Vel = VELMAX
Mover_a P" via P2
Prec = ALTA
Vel = 0.2 * VELMAX
Mover_recta_a P
Pinza = ABRIR
#it$arse en $n p$nto so%re la pieza B
Re&$cir la veloci&a&
A%rir la pinza
A$'entar la precisi(n
!escen&er vertical'ente en l)nea recta
Cerrar la pinza para co*er la pieza B
Esperar para *arantizar cierre &e pinza
Ascen&er vertical'ente en l)nea recta
!ecre'entar la precisi(n
A$'entar la veloci&a&
#it$arse so%re la pieza C
A$'entar la precisi(n
Re&$cir veloci&a&
!escen&er vertical'ente en l)nea recta
A%rir pinza
Nivel Objeto: Disminuye la complejidad del programa. La programacin se realiza de manera
ms cmoda, ya que las instrucciones se dan en funcin de los objetos a manejar. Un planifica
dor de la tarea se encargar de consultar una base de datos y generar las instrucciones a nivel de
robot.
#it$ar B so%re C +acien&o coin&i&ir
LA!,_Bl con LA!,_Cl y LA!,_B2 con LA!,_C2
#it$ar A &entro ! +acien&o coinci&ir
E-E_A con E-E_./EC,_! 0 BA#E_A con BA#E_!
Programacin de robots 225
Nivel Tarea : El programa se reduce a una nica sentencia ya que se especifica qu es lo que
debe hacer el robot en lugar de cmo debe hacerlo.
Ensamblar A con D
Es importante destacar que, cada ve con mayor notoriedad, los sistemas de programacin de ro!
bots tienden a combinar los dos modos b"sicos #guiado y te$tual%, permitindose desarrollar el pro!
grama mediante la escritura de las instrucciones, y utiliando la posibilidad de guiado en l&nea en
aquellos momentos en que sea necesario. 'istemas como ()*+, de )--, .)/ ++ de 'ta0bli y .+ de
)dept Technology son e1emplos de esta ambivalencia.
2omo resumen, la 3igura 4.5 recoge los diferentes mtodos de programacin de robots e$istentes.
6odos de programacin
7
7
,irecto #8aiotto%
*asivo ,
8uiado 6.aniqul#Nordson%
)ctivo #)(/)9 )--%
7
Nivel robot #.:, ()*+,%
Te$tual Nivel ob1eto #()*T%
Nivel tarea
3igura 4.5. Mtodos de programacin de robots.
4.;. (E<=E(+6+ENT>' ,E =N '+'TE6) ,E *(>8()6)2+?N
,E (>->T'
Entorno de programacin.
6odelado del entorno.
Tipo de datos.
6ane1o de entradas@salidas #digital y analgica%.
) pesar de la falta de normaliacin entre los mtodos de programacin de robots e$istentes, las
necesidades comunes han originado un cierto paralelismo y afinidad entre casi todos ellos. Esta
circunstancia permite establecer una serie de caracter&sticas generales que se manifiestan en los
elementos de programacin que contienen. Tradicionalmente los requerimientos generales que se vienen
estableciendo A2()+894BC A/>D)N>94;C A-/=6E94EC para un sistema de programacin de robots son los
siguientes:
226 Fundamentos de robtica
Control de movimiento.
Control del flujo de ejecucin del programa.
Cada sistema de programacin de robots da respuesta a estos requerimientos en mayor o menor
grado. As, mientras algunos no contemplan modelo alguno del entorno, otros basan totalmente su modo
de funcionamientoen la existencia y mantenimiento de un detallado modelo geomtrico.
Se realia a continuacin una descripcin de estos requerimientos, prestando mayor atencin a los
que se consideranm!s frecuentes.
8.2.1. Entorno de programacin
Como en cualquier lenguaje de programacin convencional, es de gran importancia, para conseguir un
aumento considerable de productividad de la programacin, el contar con un entorno de programacin
adecuado a las necesidades.
"rogramar las acciones de un manipulador es complicado en el sentido de que en todo momento
existe una interaccin con el entorno, trat!ndose de un proceso continuo de prueba y error. #sta es la
principal causa que lleva a que la mayora de los sistemas de programacin de robots sean de tipo
interpretado, pudindose realiar un seguimiento paso a paso de lo programado en cada momento. Se
evita as el tedioso ciclo de editar$compilar$ejecutarmuy costoso en tiempo.
#s pues importante y de desear que un sistema de programacin de robots presente una buena
capacidad de depuracin y de ejecucin paso a paso, teniendo especialmente en cuenta la interaccin en
tiempo real que existe entre los distintos equipos de la clula en el controlador del robot. %ambin es
aconsejable la existencia de una buena monitoriacincontinua del desarrollo del programa &'()$**+.
Algunos de los sistemas de programacin actuales se soportan sobre sistemas operativos multitarea,
permitiendoel control simult!neo y sincroniado de varios robots o del robot con otros sistemas ,visin,
transportes, ect.-.
8.2.2. Modelado del entorno
#l modelo del entorno es la representacin que tiene el robot de los objetos con los que interacciona.
.ormalmenteeste modelo se limita a caractersticas geomtricas/ posicin y orientacin de los objetos, y
en ocasiones a su forma, dimensiones, peso, etc.
"ara definir la posicin y orientacin de los objetos del modelo, lo m!s frecuente es asignar a cada
objeto de manera solidaria un sistema de referencia, de manera que la posicin y orientacin de este
sistema referidos a un sistema base, normalmente denominado sistema del mundo, definen de manera
0nica las del objeto.
Algunos modelos del entorno permiten establecer relaciones entre objetos &12.3#)$45+ &6(76289#:$;5+.
<stas establecen la posible unin fsica entre los objetos. 7os objetos pueden ser independientes ,el
movimientode uno no afecta al otro-, tener dependencia de unin rgida ,el movimientode uno implica
el del otro y viceversa- o tener una dependencia de unin no rgida ,el movimientode uno implica el del
otro, pero no al revs-. #ste modelo relacional, una ve definido es actualiado de manera autom!tica
durante la ejecucin del programa mediante una estructura arborescente ,1igura *.=-, simplificando
notablementela tarea del programador.
Programacin de robots 227
No rgida
No rgida
No rgida
Rgida
No rgida No rgida
Rgida
Rgida
Figura 8.5. Relacin entre diversos elementos de un entorno de programacin.
8.2.3. Tipos de datos
Un sistema de programacin de robots cuenta, adems de con los tipos de datos convencionales (enteros,
reales, booleanos, etc.) con otros especficamente destinados a definir las operaciones de interaccin con
el entorno, como son, por ejemplo, los que especifican la posicin y orientacin de los puntos y objetos
a los que debe acceder el robot. omo ya se vio en el aptulo !, correspondiente a "errramientas
matemticas, la posicin y orientacin espacial de un objeto puede ser especificada de diversas formas.
Utili#ando coordenadas articulares o del robot$ mediante una n%upla (q ...qn), donde n es el n&mero de
grados de libertad del robot, que indica los valores articulares que debe tomar el robot para posicionar y
orientar su e'tremo como el objeto en cuestin.
Utili#ando coordenadas cartesianas o del usuario$ en este caso, una ve# asociado un sistema de
referencia de coordenadas {S () al objeto, su posicin se describe por las coordenadas cartesianas del
origen de *+(), (Px, Py, pz) mientras que la orientacin admite diferentes tipos de representacin$
, -ngulos de .uler$ (ex,B,y).
, uatemios$ (/+e01, h, sene01, hy sene01, b sene01).
, 2atri# noa$
228 Fundamentos de robtica
La representacin conjunta de posicin y orientacin del extremo del robot se consigue agrupando las
tres coordenadas de posicin con alguno de los mtodos de representacin de la orientacin. Los
diferentes sistemas de programacin existentes emplean una o varias de estas representaciones:
VAL Il (ta!bli"
A#L(I$#"
A%LA (A$$"
%A&I' (A$$"
V( (Adept"
AL (tanford"
emplea (q, ...q6), (Px, Pv - Pz, ex) B, y)
emplea (Px, Py, Pz, ex) B, y)
emplea (Px, Py, Pz, *+,-) hxsensl-) hysen,-) h.sensl-"
emplea (Px, Py, Pz, *+I-) hxsen,-) hysensl-) h.sen,-"
emplea (Px, Py, Pz, ex) B, y)
emplea (Q, ... q6) y matrices de transformacin /omognea.
0n VAL Il) V+ y %A&I' tambin existe la posibilidad de emplear matrices de transformacin.
8.2.4. Manejo de entradas-salidas
La comunicacin del robot con otras m12uinas o procesos 2ue cooperan con l) es fundamental para
conseguir su integracin y sincroni.acin en los procesos de fabricacin. 0sta comunicacin se consigue)
en el nivel m1s sencillo) mediante se3ales binarias de entrada y salida. #ediante ellas el robot puede
decidir comen.ar una determinada accin o indicar a un dispositivo externo 2ue comience la suya.
&ara el manejo de las salidas binarias el robot posee instrucciones de activacin o desactivacin de
las mismas. 0n cuanto a las entradas) el robot tiene capacidad de leerlas y controlar el flujo del programa
en funcin de su valor) como esperas o saltos condicionados. Algunos sistemas incluyen la posibilidad
de comen.ar autom1ticamente su ciclo de trabajo cuando le llega una se3al binaria determinada.
4na utili.acin especial de las entradas binarias es la generacin de interrupciones. 0n estos casos
una determinada se3alo una combinacin lgica de las mismas) se monitori.a de manera autom1tica. i
la citada condicin se verifica) la unidad de control del robot ejecuta una rutina especial)
interrumpindose el flujo normal del programa. 0sta interrupcin puede reali.arse inmediatamente
(incluso en mitad del movimiento del robot") cuando finali.a la ejecucin de la instruccin en curso (al
finali.ar el movimiento") o cuando finali.a el ciclo de trabajo fijado por el programa (al finali.ar la
secuencia".
4na utili.acin a mayor nivel de la comunicacin del robot con su entorno lo constituye el empleo de
comunicaciones mediante red local o conexin punto a punto (normalmente mediante l5nea serie
as5ncrona". 0sta comunicacin permite integrar al robot en un sistema inform1tico general controlando o
supervisando su funcionamiento desde un computador externo. 0jemplos de sistemas con esta posibi6
lidad son los sistema %A&I' de A$$ y VAL n de ta!bli.
+tra aplicacin importante de las entradas7salidas del robot) ya sean digitales o analgicas) es la
integracin de sensores) incorporando la informacin de stos al desarrollo de la tarea. Los sensores
permiten ante todo reali.ar determinadas aplicaciones en un entorno no conocido de forma total sin tener
2ue /acer uso de /erramientas especiales. La informacin proporcionada por los sensores puede
utili.arse en la programacin de robots de muy diversas formas) entre las 2ue se pueden destacar las
siguientes:
Programacin de robots 229
Modificar la trayectoria.
Elegir entre diversas alternativas.
Obtener la identidad y posicin de objetos y sus caractersticas.
Cumplir con restricciones externas.
8.2.5. Control del movimiento del robot
Indudablemente, un mtodo de programacin de robots debe incluir la posibilidad de especificar el
movimiento del robot. !dem"s del punto de destino, puede ser necesario especificar el tipo de
trayectoria espacial #ue debe ser reali$ada, la velocidad media del recorrido o la precisin con #ue se
debe alcan$ar el punto destino. Incluso en ocasiones puede ser necesario indicar si el movimiento debe
reali$arse en cual#uier caso o debe estar condicionado a alg%n tipo de circunstancia, procedente, por
ejemplo, de la medida proporcianada por un sensor.
&al y como se vio en el Captulo ' dedicado al control cinem"tica, las trayectorias de un robot pueden
ser punto a punto, coordinadas o trayectoria continua, englobando este %ltimo caso a la lnea recta, inter(
polacin circular y otras.
En cuanto a la especificacin de la velocidad, suele ser frecuente indicarla en la propia instruccin de
movimiento como tanto por ciento de una velocidad base definida aparte. )e este modo se facilita la
alteracin de la velocidad de todo el programa o de una parte de l sustituyendo una %nica instruccin.
En muc*as ocasiones, el movimiento del robot en un entamo con obst"culos obliga a la utili$acin de
una trayectoria en lnea recta, para as asegurar #ue el robot no colisione con ninguno de ellos. +o
obstante, muc*os sistemas de programacin disponen de los denominados puntos de paso o via points,
para resolver este tipo de situaciones. El modo en #ue una determinada configuracin ,posicin y
orientacin- se define como punto de paso, est" relacionado con la especificacin de la precisin con #ue
se desea #ue el robot alcance dic*o punto.
El control ,cinem"tico.din"mico- del robot, recibe las referencias de posicin procedentes del
programa, no admitiendo una nueva referencia *asta #ue el extremo del robot no alcan$a la referencia en
vigor con la precisin indicada. )e este modo, si la precisin con la #ue se desea alcan$ar una
determinada configuracin se define como baja, el extremo del robot se encaminar" *acia la
configuracin siguiente sin *aber llegado a la anterior y sin tener #ue disminur apenas su velocidad. El
resultado final es #ue el movimiento gana en continuidad y velocidad a costa de perder una precisin
innecesaria en esos puntos de paso ,/igura 0.'-.
1e *a de tener en cuenta tambin la posibilidad de #ue el robot al recorrer la trayectoria generada
tenga #ue pasar por un punto singular, ya sea por#ue los valores de sus ejes no estn definidos de forma
biunvoca o por#ue alguno de ellos deba de alcan$ar una velocidad excesiva para mantener la posicin,
orientacin y velocidad deseadas del extremo. !lgunos sistemas, como el 2!3I) 4!55.678, permiten
especificar #u tipo de interpolacin se debe utili$ar de forma general durante la ejecucin de una
trayectoria cuando se *a de pasar por estos puntos singulares.
9a consideracin de las se:ales captadas por los sensores en la especificacin de los movimientos del
robot, puede *acerse a varios niveles. ;na primera posibilidad responde a la interrupcin del
movimiento del robot por verificarse alg%n tipo de condicin extema programada. Esta posibilidad ya
230 Fundamentos de robtica
Posicin
programada
Camino _____.
descrito
por el extremo
del robot
Zona de
precisin
Figura 8.6. Funcionamiento de un punto de paso (via point).
comentada en el manejo de Entrada-Salida se suele denominar movimiento protegido o monitoriado
(guarded motions).
!a segunda alternativa" implica la modi#icacin del movimiento" en cuanto a la situacin de destino o
velocidad" seg$n la in#ormacin captada del entorno. %e este modo el movimientodel extremo del robot
&ueda alterado" adapt'ndose a las necesidades de un entorno cambiante o parcialmente indeterminado.
Estos movimientos se conocen como acomodaticios (compliant motionsi. En la pr'ctica los movimientos
monitoriados se implementan mediante el uso de interrupciones" mientra &ue los acomodaticios se
realian medianteel uso de #unciones especiales (#uncin )!*E+ en ,)! *-o ,./.
8.2.6. Control del flujo de ejecucin del programa
)l igual &ue en cual&uier lenguaje de programacin de propsito general" un lenguaje de programacin
de robots 0a de permitir al programador especi#icar de alguna manera un #lujo de ejecucin de
operaciones. Se emplean para ello las estructuras 0abituales de bucles tfor, repeat, while, etc./. *ambi1n
es de especial importancia la capacidad de procesamiento en paralelo" tanto para el control de varios
robots trabajandoconjuntamente bajo las rdenes de un solo programa" como para el control de un $nico
robot en una celda de trabajo cu2os e&uipos se encuentran igualmente bajo el control del programa del
robot. Se emplea para ello se3ales de sincronismo basadas en sem'#oros 2 ejecucin de tareas en
paralelo.
Es importante para la ma2or4a de las aplicaciones el tener un control de interrupciones mediante las
&ue distintos e&uipos en #uncionamiento puedan interaccionar con el robot. Se debe poder #ijar la
prioridad en el tratamiento de las mismas" as4 como activarlas y desactivarlas durante la ejecucin de
diversas #ases del programa.
Programacin de robots 231
8.3. EJEMPLO DE PROGRAMACIN DE UN ROBOT INDUSTRIAL
Para concretar de forma prctica como se realiza la programacin textual de un robot industrial, se
desarrolla a continuacin un caso concreto utilizando un lenguaje textual de carcter experimental, como
es el Cdigo-R[FELI-85]. Este lenguaje fue desarrollado para su utilizacin sobre el robot DIS!-E"#$
Se trata de un cdigo de bajo ni%el &ue sir%e de enlace entre el controlador del robot y un lenguaje de
ms alto ni%el, pudiendo ser escrito directamente o ser generado por otro sistema de programacin
superior, como es el caso del 'RS ()RRIE*+,S--".$
'a aplicacin a programar, mostrada en la /igura -$0, consiste en una c1lula de %erificacin y
empa&uetado de componentes$ 'os componentes llegan a la c1lula a tra%1s de un alimentador, de donde
el robot 2a de cogerlos y realizar un test espec3fico de %alidacin sobre ellos$ Si el test resulta positi%o, se
coloca el componente en el primer agujero libre del pallet de 4x# situado en una cinta de transporte
contigua$ Esta cinta se mue%e mediante un motor controlado por el propio robot$ Si el test resultase
negati%o 5componentedefectuoso6, se colocar el componente en una caja de componentes desec2ados$
El robot utilizado en la aplicacin es de tipo SCR, de cuatro grados de libertad7 dos para
posicionamientoen (x, y), uno para subir y bajar la pinza en z y el cuarto para girar la pinza sobre el eje
z. El tercer eje tiene la particularidad de &ue est accionado neumticamente, por lo &ue slo posee dos
posibles posiciones7 arriba y abajo$
Cinta
transportadora
Robot
SCR
Pallet
Caja de
desec2os
!otor
cinta
limentador
Figura 8.7. Esquema de la aplicacin programada con Cdigo-A.
232 Fundamentos de robtica
Ejemplo
Como seales de control de la clula por parte del sistema de control del robot se utilizan diversas
seales digitales de entrada y salida. Como seales de entrada digitales se tienen:
Ea : Indica si hay componente en el alimentador.
Eh : Indica la existencia de componente en la herramienta (pinza).
Et : Indica si el test ha resultado positivo.
Ep : Indica si el pallet est disponible.
ycomo salidas digitales:
!n : "larma #ue indica la necesidad de un nuevo componente.
!h : "larma #ue indica #ue no hay componente en la pinza.
!m : !eal de control del motor de la cinta de transporte.
!t : !eal de activaci$n del test.
En la %abla &.' se describen de (orma breve el (ormato simpli(icado de las instrucciones del C$digo)
*+ necesarias para poder compreder sin di(icultad el c$digo del programa #ue se muestra a continuaci$n.
Existen adems dos macroinstrucciones para coger la pieza (C,-) y dejar la pieza (DEI).
Tabla 8.1. Instrucciones del lenguaje Cdigo-R
.,!/
0om. .armetros 1escripci$n
2ariable posici$n (x+y) .osiciona el extremo del robot en la posici$n
especi(icada.
3lamada a una subrutina.
4ucle de repetici$n.
5in de bucle.
*ealizaci$n de una operaci$n entre variables.
!alto condicional.
!alto incondicional.
Esperar un tiempo en segundos.
-irar pinza a una orient.
Esperar entrada.
*etorno de subrutina.
"signar velocidad.
6onitoriza el valor de una seal un tiempo+ si
la seal toma el valor indicado salta a l7nea.
1e(inici$n de var. de posici$n.
1e(inici$n de var. de orientaci$n.
!ubir la pinza.
4ajar la pinza.
"ctivar salida durante un tiempo.
.or de(ecto es siempre.
!4*
48C
*E.
,.E
!"39
!"3
E!%
-.:
E!E
*E%
2E3
6,0
2"*
2"*a
!84
4";
!31
0<!ubrutina
0=rep.+identi(icador
Identi(icador de bucle
2ar+,peracion+ 2ar
0<de linea+ condici$n
0= de l7nea
2alor n>merico
2ariable orientaci$n
Id. Entrada ? valor
tipo y velocidad
Id entrada ? valor+ linea de
salto+ tiempo de espera
Id. variable ? posici$n
Id. variable ? orientaci$n
Id.!alida ? valor+tiempo
.,!/ .a
!4* @AA
48C B+'
*E. '
,.E .v?.aC.i
!"39 'AA+ Ea?'
!"3 'AD
E!%E
-.:,a
E!E Ea?l
*E%
2E3 a?EAAA
6,0 Ea?'+BAF+@A
2"*.a? 'AA+ l AA
2"*a,p ? 'AA
!84
4";
!31 !n?l+l,
Macroinstrucciones
MAC COG
PINZA = ABRIR
BAJ
EST 0.5
PINZA = CERRAR
SUBIR
END MAC
MAC DEJ
BAJ
PINZA = ABRIR
EST 0.5
SUB
PINZA = CERRAR
END MAC
Programacin de robots 233
Definicin de la macrin!"r#ccin c$er
Definicin de la macrin!"r#ccin DEJAR
El programa desarrollado para realizar esta aplicacin consta de un mdulo principal y varias
subrutinas. A continuacin se muestra el cdigo de programa de cada una de ellas, precedidas de una
breve explicacin de su funcionamiento.
Inicializacinde variables
Se definen en este bloque de datos inicial la velocidad lineal y angular del efector final, as como
distintas variables con posiciones y orientaciones a utilizar durante el desarrollo de la aplicacin.
1
2
%E& '(000
%E&a ')00
* %AR Pa
+ %AR P"
5 %AR ,i
- %AR Pd
. %AR P/
0 %AR Pf
)0 %AR Ic
)) %AR If
)( %ARa O,
)* %ARa Oa
)- %ARa O"
%elcidad 1a!e de ,!icinamien"
%elcidad de $ir de la ,in2a
3+504(.5
04+50
**043*0
3(504+50
P!icin del alimen"adr
,!icin del di!,!i"i/ de "e!"
,!icin de cmien2 del ,alle"
P!. almac5n de cm,. defec"#!!
**043*0
**043*0
!, "
", !
P!. ,alle" li1re # a#6iliar
P!. de la fila li1re
Incremen" de cl#mna
Incremen" de fila
)00
"
50
Orien"acin del cm,. en ,alle"
Orien"acin del cm,. en alimen"acin
rien"acin de di!,!i"i/ de "e!"
234 Fundamentos de robtica
Proceso de llenado de pallet
Primero se pide un nuevo pallet, y despus de coger el componente, se realiza el test. Si el test resulta
positivo, se coloca el componente en el pallet y se actualiza la variable que representa la primera
posicin libre en el pallet. Si el test es negativo, se desecha el componente y se deja en la zona de
componentes defectuosos. Si desaparace el pallet durante el llenado, se pedir un nuevo pallet y se
reiniciar el proceso.
100 SBR 300
101 BUC S,filas
102 OPE Pv=Pf
103 BUC 3,columnas
104 SAL* 100,Ep=0
105 SBR 500
10 SBR 00
10! SAL* 110,E"=1
10# SBR !00
10$ SAL 104
110 SL% S"=O
111 SUB
112 SBR 400
113 OPE Pv=Pv&'c
114 REP columnas
115 OPE Pf=Pf&lf
11 REP filas
11! SAL 100
Subrutina de nuevo pallet
Solici"a pall(" nu(vo
Bucl( )( in)(*aci+n )( filas
Comi(n,o )( fila
Bucl( )( in)(*aci+n )( columnas
-o .a/ pall("0 com(n,a1 p1oc(so
2oma1 compon(n"( )(l alim(n"a)o1
R(ali,a1 "(s"
Compon(n"( v3li)o4 Si"ua1l( (n pall("
Compon(n"( )(f(c"uoso4 R(c.a,a1l(
Co5(1 un nu(vo compon(n"(
2(s" pasa)o, )(sac"iva1 "(s" / saca1
compon(n"( )(l )isposi"ivo )( "(s"
Coloca1 compon(n"( (n pall("
'nc1(m(n"a1 posici+n )( columna
fin )( in)(*aci+n )( columnas
'nc1(m(n"a1 fila
6in in)(*aci+n filas, pall(" ll(no
El propsito de esta subrutina es garantizar que el pallet nuevo est posicionado en la posicin de
llenado, inicializando las variables Pv y Pf a la primera posicin del pallet. Para conseguir esto, se activa
la salida que controla el motor de movimiento de la cinta.
300 OPE Pv=Pi 'niciali,aci+n )( Pv
301 OPE Pf=pi 'niciali,aci+n )( pf
302 SL% Sm=l P()i1 nu(vo pall(", ac"iva1 cin"a
303 ES2 2 2i(mpo )( (vacuaci+n )(l pall(" an"(1io1
304 ESE Ep=l Esp(1a ll(5a)a )( pall(" nu(vo
305 SL% Sm=O Pa1a1 cin"a
30 RE2 6in )( nu(vo pall("
Subrutina de colocar en pallet
Esta rutina coloca, con la adecuada orientacin de la pinza, un componente en la primera posicin libre
en el pallet.
T
400
401
402
403
POS$ Pv
GPZ op
DEJ
RET
Subrutina colocar componente
Programacinde robots 235
Ir a posicin libre en pallet
on la correcta orientacin
!in "e colocar en Pallet
Espera durante un mximo de 30 segundos la llegada de un componente al alimentador. Si no llega,
emite una alarma durante 10 segundos y lo vuelve a intentar. Si llega, lo recoge, verificando que est en
la pinza del robot. Si no est (por ejemplo, porque a resbalado! emite una alarma y trata de realizar la
operaci"nde nuevo.
#00 POS$ Pa
#01 GPZ Oa
#02 $O% Ea&1'#0('30
#03 EST 30
#04 S)D Sn&1'10
#0# S*) #02
#0( OG
#0+ S*)*
#10'E,&0
#0- RET
#10 S)D S,&1'#
#11 S*) #00
Subrutina de test
posicionarse sobre el ali.enta"or
Orient/n"ose correcta.ente
$onitori0a la entra"a 1 "1rante 30s ./23
Espera "e 30 se41n"os
Si no lle4a co.ponente en 30s
*lar.a 5Sn6 "1rante lOs # repite accin
)le4a co.ponente' co4erlo3
7eri!icar 81e co.ponente ,a si"o co4i"o
9in "e to.ar co.ponente
9allo al co4er el co.ponente
E.itir alar.a 5S,6 "1rante Ss : reintentar
Esta subrutinacoloca el componente en el dispositivo de test y lo activa.
(00
(01
(02
(03
(04
POS$ Pt
GPZ Ot
;*J
S)D St&l
RET
Subrutina de recazo de componente
posicionarse sobre "ispositivo "e test
orientarse correcta.ente
Intro"1cir co.ponente en "ispositivo
*ctivar test
9in "e test
Esta subrutina recaza los componentes que no pasan el test, y los deja en el almac$n de componentes
defectuosos.
+00
+01
+02
+03
+0#
S)D St&O
S<;
POS$ P"
DEJ
RET
o.ponente "e!ect1oso
Sacar co.ponente "el "ispositivo "e test
posicionarse sobre al.acen "e pie0as .alas
De=ar co.ponente
9in "e rec,a0ar co.ponente
236 Fundamentos de robtica
8.4. CARACTERSTICAS BSICAS DE LOS LENGUAJES RAPID Y V+
En este apartado se realiza un breve repaso a las caractersticas de dos lenguajes de programacin
comerciales. Se trata de los sistemas de programacin de robots V+ de Adept Technologies y RA!" de
A##. $on este repaso se pretende %ue el lector conozca de &orma pr'ctica la estructura real de un
lenguaje de programacin de robots. (a in&ormacin &acilitada para ambos lenguajes ha sido e)trada de
los respectivos manuales *A##+,-. *A"ET+/,.0 1en ning2n caso se pretende sustituirlos0 tan slo realizar
una breve introduccin a la programacin de ambos sistemas. ara la correcta comprensin de las
e)plicaciones es conveniente %ue el lector posea algunas nociones b'sicas de programacinen lenguajes
in&orm'ticosde programacinconvencionales.
8.4.1. El lenguaje de progr!"#$% RAPID
El lenguaje RA!"0 desarrollado por la empresa A## para su nueva generacin de robots0 constituye
uno de los 2ltimos lenguajes de programacin de robots aparecido en el mercado. Su lanzamiento en el
a3o 4,,- supone un nuevo paso adelante en el desarrollo de herramientas de programacin para robots
comerciales.
$onstituye un lenguaje de programacin te)tual de alto nivel %ue incluye algunas caractersticas
importantes0 tales como la utilizacin de &unciones y procedimientos0 la posibilidad de usar rutinas
parametrizables0 la estructura completamente modular del programa o la posibilidad de declarar rutinas y
datos como locales o globales.
5n programa escrito en RA!" consiste en una serie de instrucciones %ue describen el trabajo del
robot. $ada instruccin tiene asociada una serie de par'metros %ue de&inen de &orma completa la accin
a realizar. Estos par'metros espec&icos a cada instruccin pueden ser valores num6ricos0 re&erencias a
un dato0 e)presiones de datos0 llamadas a una &unciones e incluso en algunos casos cadenas de
caracteres.
(os programas se desarrollan en la paleta de programacin bajo un entorno de men2s dirigidos. A
trav6s del joystic7 situado en la propia paleta y de los diversos botones adicionales 8tipo de movimiento0
ejes e)ternos0 entradas9salidas: se puede tambi6n realizar entrada de datos por guiado e interaccionar con
el entorno en cual%uier momento. (os programas tambi6n pueden ser escritos directamenteen un $ con
un editor de te)to convencional0 para ser posteriormente volcados en la memoria del robot a trav6s de un
dis%uete.
Se trata de un lenguaje altamente estructurado %ue recuerda a un lenguaje de programacin de
propsito general. (os programas desarrollados en RA!" se denominan tareas e incluyen el programa
en s junto con varios mdulos de sistema0 mdulos %ue contienen rutinas y datos de tipo general0
independientes del programa pero %ue pueden ser utilizados por 6l en cual%uier momento. A su vez0 el
programa puede ser dividido en varios mdulos0 uno de los cuales ha de ser el principal. $ada uno de
estos mdulos contiene submdulos de datos0 adem's de diversas rutinas de ejecucin. (a ;igura /./
muestra de &orma es%uem'tica la organizacin de esta estructura. (a de&inicin de mdulos se realiza
r
Programacin de robots 237
I
'
>~
especificando su nombre y sus atributos, como por ejemplo que se trata de un mdulo del sistema
(SYSMODE) o que no se puede modificar (VIEWONLY)
Existen tres tipos diferentes de rutinas o subprogramas posibles:
Procedimiento: Rutina que no devuelve ningn valor y se utilia como una instruccin!
"uncin: Rutina que devuelve un dato de tipo espec#fico y que se utilia como una expresin!
Rutina $R%P: &on rutinas que se asocian a interrupciones y se ejecutan cuando 'stas se acti(
van! )o pueden llamarse nunca de forma expl#cita!
*os datos a manejar pueden ser de dos tipos:
$ipo de dato atmico: )o se define en funcin de otro tipo y no se puede dividir en diferentes
componentes!
$ipo de dato registro: Est+ compuesto por una serie ordenada de componentes con sus respec(
tivos nombres! *os componentes pueden ser a su ve de tipo atmico o de tipo registro!
Estos datos, que se pueden definir como globales o locales tanto en mdulos como en subrutinas,
pueden a su ve ser definidos como:
,onstantes: (!ONS) representan datos de un valor fijo a los que no se puede reasignar un nue(
vo valor!
-ariables: (VAR) son datos a los que se les puede asignar un nuevo valor durante la ejecucin
del programa!
Programade la tarea
Programa
.od! datos
/Programa main0
Rutina principal
r
Rutina 1
/mdulo 20
........
Rutina 3
/ mdu4o30
..... .od! datos
/ mdulo50
".
Rutina5
".........
....
.od! de sistema 1 6
.od! datos
Rutina 5
.od! de sistema 3
"igura 7!7! Estr uctur a de un pr ogr ama en RAPI D.
238 Fundamentos de robtica
Persistentes:(PERS) se trata de variables en las que cada vez que se cambia su valor durante la
ejecucin del programa, tambin se cambia el valor de su inicializacin.
Los tres tipos bsicos de datos habituales con los que se trabaja son:
Numrico: numo
Lgico: bool.
Cadena: string.
s importante destacar la e!istencia de una serie de estructuras prede"inidas de datos con distintos
campos para la utilizacin por parte del usuario. #e muestran a continuacinalgunos ejemplos:
Confdata
$escripcin: estructura para especi"icar la con"iguracin del robot.
Campos: efl: cuadrante del eje %
ef4: cuadrante del eje &
ef6: cuadrante del eje '
jemplo:
VAR eonfdata eonfl:!" #$%#$&
Loaddata
$escripcin: describe la carga colocada en la mu(eca del robot.
Campos: mass: peso de la carga en )ilogramos
cog: centro de gravedad de la carga
aom: orientacin de los ejes de inercia en el centro de gravedad e!presada como
cuatemios.
ix, i' iz: momentos de inercia de la carga alrededor del eje !, eje y y eje z e!presado en
)gm*.
jemplo:
PERS loaddata (ie)a: !*+$*+,$,$+, t.t#$,$,$, t.$,$,t.
Tooldata
$escripcin: estructura para especi"icar las caracter+sticas de una herramienta.
Campos: rob-old: de"ine si el robot tiene la herramienta o no.
tframe: sistema de coordenadas de la herramienta ,posicin y orientacin de la
herramienta-
tload: dato tipo loaddata.
jemplo:
PERS tooldata (in)a:!*.R/E$**01$,$22,&$*,.024$,$,.343$&&
*+$* %23$,$ 1+&$* #$,$,$, &$$$&&
Programacin de robots 239
Ejemplo:
Robtarget
Descripcin: se utiliza para definir la localizacin del robot y de los ejes externos
Campos: trans: desplazamientoen x,y,z del sistema de coordenadas
rot: rotacin del sistema de coordenadas como cuaternios
robconf: configuracindel robot (cfl,cf4,cf6 y cfx)
extax: posicin de los ejes externos
VAR robtarget posicion.= [ [600,00,22!,[ ",0,0,#!,[",",0,#!,
["$,"2,9%9,9%9,9%9,9%9!&'
Motsetdata
Descripcin: se utiliza para la definicin de algunos parmetros de mo!imiento "ue afectan a las
instrucciones de posicionamiento del programa#
Campos: (e$.oride: !elocidad como porcentaje de la programada
(e$.max: !elocidad mxima en rnm$s
sing#%rist: des!iacin de la orientacin de la &erramienta para e!itar singularidad de la
mu'eca#
sing.arm: des!iacin de la orientacin de la &erramienta para e!itar singularidad en el
brazo#
conf.ax$ :des!iacinmxima del eje (
earif#ax4:des!iacinmxima del eje 4
eanfax6:des!iacin mxima del eje 6
El sistema de programacin)*+$Dposee un !ariada gama de instrucciones para controlar el flujo de
ejecucin del programa, de entre# las "ue destacan: llamadas a rutinas con distintos parmetros,
instrucciones de repeticin tipo )#R, tipo *) o tipo +,*-%. ,e cuenta adems con las operaciones
aritm-ticas &abituales (asignacin,.,/,.,"/ "ue se pueden asociar tanto a n0meros como a !ectores o
matrices (con las limitaciones oportunas), con algunas funciones matemticas particulares como son:
Add, 0$ear, $ncr, 1ecr, Abs y operadores booleanos para el tratamientode !ariables tipo boo$.
El control de mo!imientos del robot se encuentra especialmente cuidado, existiendo primeramente
unos parmetros generales de mo!imiento "ue afectan a todas las instrucciones de mo!imiento, a no ser
"ue en la propia instruccin se indi"ue lo contrario# *lguno de estos parmetros son:
Aee2et: mxima aceleracin permitida#
2ingArea: m-todo de interpolacin en puntos singulares#
3rip$.oad: peso de la pieza a manipular#
Ve42et: !elocidad mxima y sobre!elocidad#
1as intrucciones generales de mo!imiento se definen en base a cmo posicionar el punto central de la
&erramienta (2C+), pudi-ndoseutilizar las siguientes#
240 Fundamentos de robtica
Asignar un valor
Obtener el valor absoluto
Leer el valor de una seal de entrada analgica
Reducir la aceleracin
Sumar un valor numrico
Borrar un valor
Iniciar un reloj para la toma de tiempos
Parar un reloj para la toma de tiempos
Comentario
Si se cumple una condicin, entonces !una instruccin"
Controlar la con#iguracin durante movimiento articular
$onitori%a la con#iguracin del robot durante movimiento en l&nea recta
'ecrementar en I
(erminar la ejecucin del programa
Repetir un n)mero de veces
Leer el valor de la *ora actual como valor numrico
Ir a una nueva instruccin
'e#inir la carga del robot
Interrumpir el movimiento del robot
Si se cumple una ocndicin, entonces + de otra manera
Incrementar en l
Invertir el valor de una salida digital
,ombre de una l&nea
'e#inir la desviacin permitida en la con#iguracin del robot
$over el robot en movimiento circular
$ovimiento articular del robot
$ovimiento del robot en l&nea recta
'espla%amiento de la posicin del robot
Apertura de un #ic*ero o de un canal serie
Comprobar -ue se utili%a un par.metro opcional
Llamada a un nuevo procedimiento
/enerar un pulso en una seal digital de salida
Llamada a un manejador de errores
Continuar con el movimiento del robot
Reset de una salida digital
Recomen%ar tras un error
(erminar la ejecucin de una rutina
Set de una salida digital
Cambiar el valor de una salida analgica
Cambiar el valor de una salida digital
Cambiar el valor de un grupo de salidas digitales
'e#inicin de la interpolacin alrededor de puntos singulares
Parar la ejecucin de un programa
'ependiendo del valor de la e0presin
Borrar el te0to de la paleta de programacin
Leer las teclas de #uncin de la paleta de programacin
1scribir en la paleta de programacin
Cambiar la velocidad programada
1sperar *asta el set de una entrada digital
1sperar un tiempo determinado
1sperar *asta -ue se cumpla una condicin
Repetir mientras
1scribir en un #ic*ero de caracteres o en un canal serie
1scribir en un canal serie binario
Tabla 8.2. Juego de instrucciones del RAPID
Abst)
Alnputt"
AccSet
Add
Clear
Cl2Start
Cl2Stop
cornrnent
Compactl3
Con#4
Con#L
'ecr
15I(
3OR
/et(imeO
/O(O
/ripLoad
6old$ove
I3
Incr
Invert'O
label
LimCon#L
$ovee
$ove4
$oveL
oreo
Open
Present&"
ProcCall
Pulse'O
RAIS1
Rel$ove
Reset
R1(R7
R1(8R,
Set
SetAO
Set'O
Set/O
SingArea
Stop
(1S(
(P1rase
(PRead39O
(P:rite
;elSet
:ait'I
:ait(ime
:ait8ntil
:6IL1
:rite
:riteBin
Programacin de robots 241
MoveC: mover el TCP de manera que ste describa un crculo.
MoveJ: mover el robot con trayectoria articular (isocrona o coordinada en articulares).
MoveL: mover el TCP del robot describiendo una lnea recta.
Estas instruciones tienen asociados una serie de parmetros, definidos como variables de los tipos
generales predefinidos, algunos de los cuales ya se an visto. !a forma de programar estas instrucciones
es"
MoveJ f\Cone] ToPoint Speed f\V] I f\T] Zone #$%& Tool f\Wb!]
f\Cone]: e'ecuci(n concurrente. )e e'ecutan las siguientes instrucciones a medida que el robot
se mueve.
ToPoint: punto destino del robot (tipo de dato" robtarget"# )i se graba directamente por guiado
aparecer un asterisco (*).
Speed: velocidad que afecta al movimiento (tipo de dato" speeddata"#
f\V]: velocidad especfica del TCP (tipo de dato" n$m%#
f\T]: tiempo en segundos que debe tardar en reali+ar el movimiento (tipo de dato" n$m&#
Zone: +ona del movimiento para que se empiece a e'ecutar la siguiente instrucci(n (tipo de da,
to" 'onedatai#
[\Z]: precisi(n del TCP (tipo de dato" n$mi#
Tool: la erramienta en uso (tipo de dato" tooldata"#
f\Wb!]: ob'eto de traba'o con el que el movimiento est relacionado (tipo de dato" (ob!data"#
!os movimientos se programan a base de posiciones definidas, es decir, se le dice al robot que se
mueva desde donde se encuentra a una posici(n determinada.
El sistema permite manipular se-ales de entrada.salida de diversas maneras. )e definen los nombres
de las se-ales en los parmetros del sistema y a travs de una llamada a la funci(n correspondiente se
puede leer su valor )*lnp$t" o modificarlo )Set*"# Es posible, igualmente, la manipulaci(n al mismo
tiempode un grupo de se-ales.
)e permite tambin la comunicaci(n con la paleta de control, tanto para mostrar mensa'es en pantalla
)TPWrite"+ como para leer la informaci(n que se introdu+ca a travs de ella )TP,edStr"# Es posible la
lectura.escritura a travs de un canal o ficero tanto en /)C00 como en binario. E1iste adems la
posibilidad de que el programador controle las acciones a reali+ar cuando en una determinada subrutina
aparece un error no previsto, por e'emplo divisi(n por cero.
)on importantes tambin las instrucciones que posibilitan el mane'o de un relo' de tiempo, que se
puede utili+ar durante la e'ecuci(n del programa para controlar determinadas acciones.
En la Tabla 2.3 se muestra el 'uego de instrucciones del 4/P05 con una breve e1plicaci(n de la
aplicaci(nde cada una de ellas.
Programa ejemplo
)e presenta a continuaci(n un programa e'emplo de una operaci(n sencilla de manipulaci(n. El robot
retira de una cinta transportadora aquellas pie+as identificadas como defectuosas. (6igura 2.7.) !a
operaci(n se desarrolla como sigue" el robot se encuentra en espera asta la llegada de una se-al
indicando la e1istencia de una pie+a defectuosa sobre la cinta transportadora. El robot procede entonces
242 Fundamentos de robtica
Cmara
Robot
Sensor
de presencia
Cinta
transportadora
cinta
Figura 8.9. Clula robotizada de inspeccin para ejemplo de programacin.
a parar la cinta y a coger la pieza y a depositarla en un almacn de piezas defectuosas. El propio robot se
encarga de activar de nuevo el movimientode la cinta una vez la pieza ha sido cogida. Tras la operacin,
el robot vuelvea su posicin inicial y se repite de nuevo el ciclo.
El programa cuenta con una rutina principal unto con varias subrutinas espec!ficas, adems de la
definicinde las variables correspondientes.
"efinicinde variables
El robot posee en su e#tremo una pinza para la manipulacin de piezas, definida dentro del programa
mediante la variableherramienta de tipo tooldata. $ su vez se ha definido una variable loadata llamada
carga para definir la carga a transportar por la pinza.
%ERS tooldataherramienta :=&'$(SE,&&)*,+,,,-.,&+.),/,+,+.-0-,+..,
&1,&2,-,+,*1.,&3,+,+,+.,+,+,+..
%ERS loaddatacarga :=&1,&1+,+,1+.,&3,+,+,+.,+,+,+.4
$ las entradas y salidas digitales se les puede asignar identificadores alfanumricos. Esta asigancin
es vlida para todos los programas, debindose realizar en la etapa de definicin de parmetros del
sistema. %osteriormente, los programas 5ue vayan a usar estas variables, debern declararlas con la
instruccin VAR. (a salida correspondiente a la activacin de la pinza se ha denominado pinza. (a
entrada digital correspondiente a la deteccin de una pieza defectuosa se llama pieza_defectuosa. La
T
6
Programacin de robots 243
salida correspondiente a la activacin del motor de la cinta se llama activar_cinta. Existe adems una
entrada digital llamada terminar para indicar que la aplicacin ha terminado.
VAR signaldo pinza
VAR signaldo activar_cinta
VAR signaldi pieza_defectuosa
VAR signaldi terminar
.seal de activacin de pinza
.seal de activacin de cinta
.seal de pieza defectuosa
.seal de terminar programa
Es necesario definir una configuracin inicial en la que el robot espera la seal que le indica que
puede recoger la pieza defectuosa. sta se denomina conf_espera ! tiene estructura de robtarget.
VAR robtarget conf_espera"# $$%&&'(&&'))(*'$+'&'&'&*'$+'+'&'&*'
$,E,',E,',E,',E,',E,',E,* *-
Existen a su vez una serie de variables que se utilizan durante la e.ecucin del programa ! que !a
estn predefinidas. /e inclu!en entre ellas los parmetros de precisin 0z)&'z1&'234E ...5 ! los de
velocidad 0V6A7'V3&&&'V8&& ...5 pertenecientes a la instruccin de posicionamiento' adems de una
variable 09:A;:5 que indica la ausencia de carga en la pinza.
Rutinas de control de la pinza
<ara el control directo de la pinza se han definido dos procedimientos' a los que se puede llamar en
cualquier momento dentro del programa principal o desde cualquier otra rutina.
<R:==oger:
/et pinza
>ait?ime &.1
@rip9oad carga
E4;<R:=
- =errar la pinza activando la seal digital pinza
- Esperar &.1 segundos
- /ealar que la pieza est cogida
<R:= ;e.an5
Reset pinza
>ait?ime &.1
@rip9oad 9:A;:
E4;<R:=
- Abrir la pinza
- Esperar &.1 segundos
- /ealar que no ha! pieza cogida
Rutina de coger la pieza de la cinta
/e coge una pieza de la cinta transportadora. /e realiza primero una aproximacin en coordenadas
angulares' movimiento coordinado en articulares 0tra!ectoria isocrona5' para ms tarde acercarse en lAnea
recta y con precisin a coger la pieza.
244 Fundamentos de robtica
PROC Cogerpieza)
MOVEJ*, VMAX, z60, herramienta
MOVEL*, VSOO, z20, herramienta
MOVEL*, V1S0, FINE, herramienta
Coger
MOVEL*, V200, z20, herramienta
ENPROC
R!"i#a $e $e%ar &a pieza
' Mo() e# ar"i*!&are+ *o# po*a pre*i+i,#
' Mo() &#ea re*"a *o# pre*i+i,#
' -a%ar *o# pre*i+i,# ./0i.a
' Coger &a pieza
' S!1ir *o# &a pieza *ogi$a
E& ro1o" $e%a &a pieza +o1re e& a&.a*2# $e pieza+ $e3e*"!o+a+
PROC e%ar4piezaO
MOVEJ*, VMAX, z50, herramienta
MOVEJ*, V500, z50, herramienta
e%ar
ENPROC
R!"i#a $e ir a &a po+i*i,# $e e+pera
' Mo(er 6a*ia a&.a*2#pieza+ .a&a+
' e%ar &a pieza)
Se .!e(e a& ro1o" $e+$e &a po+i*i,# e# &a 7!e +e e#*!e#"re 6a+"a &a po+i*i,# $e e+pera)
PROCIr4po+i*i,#4e+peraO
Mo(eJ *o#34e+pera, VMAX, z50, herramienta
ENPROC
Progra.apri#*ipa&
' Mo(er a po+i*i,# i#i*ia&
E& progra.a pri#*ipa& *o.pre#$e "o$a+ &a+ i#+"r!**io#e+ a e%e*!"ar+e para &a rea&iza*i,# pr/*"i*a $e &a
ap&i*a*i,#) A&g!#a+ +o# i#+"r!**io#e+ 1/+i*a+, .ie#"ra+ o"ra+ *orre+po#$e# a &&a.a$a+ a pro*e$i.ie#"o+)
Pri.ero +e (a a &a po+i*i,# i#i*ia& $e e+pera y +e ag!ar$a a &a i#$i*a*i,# $e 7!e e0i+"e !#a pieza
$e3e*"!o+a) 8ra+ parar &a *i#"a y *oger &a pieza, e& ro1o" &&e(a &a pieza a& a&.a*2# $e $e+e*6o+ y &a
$epo+i"a a&&) E+"e pro*e+o +e repi"e 6a+"a 7!e +e pre+io#e !# 1o",# a+o*ia$o a &a e#"ra$a $igi"a&
terminar.
PROC.ai#O
Ir4po+i*io#4e+pera'
9:ILEI#p!";"er.i#ar) < O
IF I#p!";pieza4$e3e*"!o+a) < 18:EN
Se"Oa*"i(ar4*i#"a,O'
' Mo(er a po+i*i,# $e e+pera
' E+perar +e=a& $e "er.i#ar
' E+perar +e=a& $e pieza $e3e*"!o+a
' Parar *i#"a
Programacin de robots 245
Coger_pieza
SetDOactivar_cinta, 1;
Dejar pieza
Ir_posicion_espera
ENDIF
ENDWHILE
ENDPROC
; Coger a pieza
; !ctivar se"a #e cinta
; Dejar a pieza
; Ir a posici$n #e espera
! sencio progra%a presenta#o se e p&e#en a"a#ir s&cesivos re'ina%ientos( Por eje%po, se p&e#e
conte%par e caso #e tener controa#o %e#iante &na se"a #igita )&e a pieza se enc&entre agarra#a por
a pinza * )&e no se +a*a sota#o #e,i#o a c&a)&ier circ&nstancia acci#enta(
Para eo se p&e#e &tiizar &na se"a #igita asocia#a a &na interr&pci$n, )&e se activar- #&rante e
transporte #e a pieza( Si se #etecta )&e a pieza se +a sota#o, a interr&pci$n a%ar- a &na r&tina tipo
TRAP )&e parar- #e in%e#iato e %ovi%iento #e ro,ot * presentar- &n %ensaje por a paeta #e
progra%aci$n in#ican#o e acci#ente( .na vez arrega#o e pro,e%a, a con'ir%aci$n #e operario
per%itir- a ro,ot vover a a posici$n #e espera(
Se #e'ine pri%ero a varia,e #e interr&pci$n/
0!R intn&% sena_pieza;
Dentro #e a r&tina principa %ain se asocia a a varia,e sena_pieza a r&tina #e interr&pci$n
correspon#iente* se #e'inen as varia,es/
ISignaDI sena_pieza
CONNEC1 sena_pieza 1O etrap
; !signar se"a #e interr&pci$n
; !signar r&tina #e interr&pci$n
La interr&pci$n #e,er- activarse 2nica%ente c&an#o se transporte &na pieza, &ego se activar- a
coger a pieza * se #esactivar- a #ejara( De esta 'or%a as r&tinas coger * #ejar )&e#an/
PROCCogerO
Set pinza
Wait1i%e 3(4
5ripLoa# carga
IWatc+ sena_pinza
ENDPROC
; Cerrar a pinza activan#o a se"a #igita pinza
; Esperar 3(4 seg&n#os
; Se"aar )&e a pieza est- cogi#a
; !ctivar interr&pci$n
PROCDejarO
ISeep sena_pinza
Reset pinza
Wait1i%e 3(4
5ripLoa#LO!DO
ENDPROC
; Desactivar interr&pci$n
; !,rir a pinza
; Esperar 3(4 seg&n#os
; Se"aar )&e no +a* pieza cogi#a
246 Fundamentos de robtica
Por ltimo, se deber incluir la rutina TRAP de ejecucin cuando se da la seal de interrupcin.
TRAP etrap
HoldMove ; Para la ejecucin del robot
TPErase ; orrar pantalla de paleta
TP!rite "ERR#R$ %a pie&a se 'a soltado de la pin&a"
TP!rite ""
re($)TPRead*+,"-uando el sistema est. listo pulse /tart",0*+l $)"/tart"1;
RelMove ; Reanudar el movimiento
2r3posicion3espera ; 2r a posicin inicial
E4TRAP
#tra opcin de mejora posible podr5a ser la inclusin de al(n tipo de control sobre el paso en las
cercan5as de puntos sin(ulares. %os puntos sin(ulares resultan un problema importante de ejecucin real
de movimientoslineales por parte del e6tremo del robot. En un robot A articular de 7 (dl e6isten dos
tipos posibles de puntos sin(ulares$ de mueca ,ejes 8 9 7 paralelos1 9 de bra&o ,centro de mueca
coincide con eje :1.
En el pro(rama ;ue se est mostrando ser5a conveniente aadir una instruccin para indicar ;ue en
las cercan5as de un punto sin(ular de mueca se le permite al robot separarse li(eramente de la
orientacin establecida para as5 evitar la sin(ularidad. Para ello se utili&ar5a la si(uiente instruccin al
.principio del pro(rama$
/in(Area 0!rist;
Por ltimo, otra posible mejora del pro(rama consistir5a en la ejecucin concurrente de las
instruccionesde movimientojunto con posibles instrucciones l(icas posteriores. Por de<ecto, durante la
ejecucin de una instruccin de movimiento el pro(rama se ;ueda blo;ueado, sin ;ue se ejecuten las
instrucciones si(uientes. Pero podr5a ser interesante permitir ;ue mientras el robot va a la posicin de
espera, estuviera pendiente de las seales de terminacin de la aplicacin o de la presencia de una pie&a
de<ectuosa en la cinta. Para ello, en la instruccin de movimiento a la posicin de espera se aade el
parmetro 0-onc, ;ue indica la concurrencia, ejecutndose todas a;uellas instrucciones l(icas ;ue
sucedena la instruccinde movimientomientras se reali&a .ste.
Move= 0-onc conf_espera, >MA?, &@A, 'erramienta ; mover a espera
8.4.2. El len(uaje de programacin V+
>B es un len(uaje de pro(ramacin te6tual de alto nivel, desarrollado en :CDC por Adept Tec'nolo(9.
Actualmente se utili&a en los robots Adept 9 en al(unos robots de la <irma /taEbli, como por ejemplo en
el modelo R6 CA. Furante la d.cada de los setenta los robots se utili&aron de <orma satis<actoria en
tareas como soldadura o pintura, utili&ando el (uiado como m.todo de pro(ramacin, 9a ;ue este tipo de
tareas no re;uieren interaccin entre el robot 9 el entorno. En la actualidad, la utili&acin de los robots
para la reali&acinde tareas cada ve& ms complejas re;uiere la pro(ramacinen len(uajes de alto nivel,
I
Programacin de robots 247
ya que es necesario utilizar la realimentacin de los sensores, y este tipo de interaccin slo se puede
realizar satisfactoriamentecon mtodos de programacin que contengancondiciones.
Los lenguajes de programacin de alto nivel, yen concreto V+, proporciona una mayor interaccin
entre el hombre y el robot. Adems presenta claras ventajas como son!
" #nteligibilidad! $e puede realizar una buena documentacin, as% como un dise&o ordenado y
coherente del programa.
" 'iabilidad! $obre todo en sistemas que deban responder a situaciones imprevistas.
" Adaptabilidad! Los programas permiten modificaciones, mejoras y ampliaciones con, relati(
vamente, poco esfuerzo.
" )ransportabilidad! Los programas se pueden desarrollar en una computadora *un +,, por
ejemplo- para poder ser posteriormente introducidos en el controlador del sistema a travs de
un disquete. V+ cuenta con el protocolo ./01#) y el programa de aplicacin 2134/1 que
permiten la transferencia de programas entre el controlador Adept y otro computador a travs
de una l%nea serie.
5n programa en V+ consiste en un conjunto de instrucciones. ,ada l%nea o step se interpreta como
una instruccindel programa. /l formato general de cada l%nea es
nmero_lnea etiqueta instruccin ;comentario
A cada l%nea de programa se le asigna automticamente un n6mero de l%nea, que se ajusta
automticamentecuando se insertan o borran l%neas. A medida que el programa evoluciona, los n6meros
de l%nea cambian, por lo que para identificar a una l%nea se le puede colocar una etiqueta, que no es ms
que un n6mero entre 3 y 78898 colocado al principio de la l%nea. A continuacin de la etiqueta
*opcional- se coloca cualquier instruccin vlida de V+. +or 6ltimo se puede incluir en la l%nea un
comentario que consiste en una frase escrita despus del carcter :;:. /l editor de programa de V+
compruebaautomticamenteque la sinta<is es correcta cada vez que se introduceuna nueva l%nea.
La primera l%nea de un programa en V+ es la instruccin =.+03>0A1=, seguida del nombre del
programay de los parmetros que deba recibir o devolver. )iene el formato!
.PROGRA nombreilista de par!metros"
donde el nombre es obligatorio y la lista de parmetros opcional. /l final del programa se indica con una
l%nea que contiene la instruccin =./?4=.
/n el sistema V+ se pueden usar variables que, dependiendo de la forma en que acceden a ellas los
programas, se pueden clasificar en tres tipos diferentes!
" >lobales! )odos los programas que se encuentran en memoria tienen acceso a ellas. /l princi(
pal problema que presentan es que hay que ser muy cuidadosos para que una subrutina u otro
programa no modifiquen el valor que est usando un programa concreto. +ara evitar este incon(
veniente se utilizan las variables locales y automticas.
" Locales! 5na variable se puede hacer local utilizando la instruccin #O$A#. 5na variable local
se crea la primera vez que se utiliza la instruccin #O$A#% y mantiene su valor entre llamadas
248 Fundamentos de robtica
al programa. Es decir, si un programa crea una variable local y luego se sale del programa, la
variable mantiene su valor hasta la siguiente vez que se entra al programa. Sin embargo, si dife
rentes tareas usan el mismo programa, o si se usa recursivamente por una tarea, pueden existir
conflictos con los valores que toma la variable en cada caso. Para evitar este inconveniente se
usan las variables automticas. Otra desventaa de las variables locales es que contin!an ocu
pando memoria una vez que el programa al que estn asociadas termina su eecuci"n.
# $utomticas% &as variables automticas se crean dentro de un programa con la instrucci"n
AUTO. Son parecidas a las variables locales ya que s"lo se puede acceder a ellas desde el pro
grama en que han sido creadas. Sin embargo, la diferencia estriba en que, cada vez que se entra
al programa, se crea una copia separada de cada variable automtica, y el valor de dicha copia
se pierde cuando se sale del programa. Si un programa se usa por varias tareas a la vez, los va
lores de las variables automticas son independientes en cada momento, con lo que se evitan los
conflictos. 'uando se sale del programa, la memoria se libera automticamente, con lo que los
programas que no estn activos al mismo tiempo pueden compartir la memoria usada por las
variables automticas. $unque no se pueden considerar como un tipo independiente de variable,
los argumentosde las subrutinas son un caso especial de variables automticas. El alcance de los
argumentosde las subrutinas es el mismo que el de las variables automticas.
Es preciso se(alar que el sistema )+ permite especificar el contexto de las variables locales y
automticas que se utilizan mediante comandos como *E+E, PO,-., .E$'*, etc. &a sintaxis general
es la siguiente%
comando @tarea:programa' parmetros
donde comando representa el nombre de un comando, y parmetros representa los parmetros normales
del comando. El elemento opcional @tarea:programa especifica el contexto para las variables
referenciadasen los parmetros del comando. tarea es un entero que indica una de las tareas del sistema
yprograma el nombre de un programa en la memoria del sistema.
/ependiendo del tipo de instrucciones o comandos que se utilicen, y de las acciones que pueden
llevar a cabo, existen tres tipos diferentes de programas que se pueden realizar con el sistemaV+ :
# Programas de control del robot% 'ontrolan directamente el robot. Pueden contener cualquier
tipo de instrucci"n, incluyendo instrucciones de movimiento del robot. -ormalmente se eecu
tan con la tarea principal 0n!mero O1, pero pueden ser eecutados con cualquier tarea del siste
ma.
# Programas de control de prop"sito general% Es un programa que no controla al robot. Pueden
existir uno o ms programas de este tipo eecutndose al mismo tiempo que un programa de
control. Por eemplo, se pueden usar estos programas para controlar procesos externos a trav2s
de l3neas binarias externas. Se pueden comunicar con el programa de control mediante variables
compartidas y se(ales soft4are. En general, estos programas no pueden eecutar directamente
instrucciones que afecten al movimiento del robot. Sin embargo, y aunque no es habitual, un
programa puede cambiar su clasificaci"n durante la eecuci"n, pasando de ser un programa de
prop"sito general a un programa de control y viceversa.
Programacin de robots 249
Programas de comandos del monitor: Se componen de comandos de monitor ms que de
instrucciones de programa. Se usan para realizar secuencias de comandos del monitor que se
usan frecuentemente.
Una de las caractersticas ms importantes del sistema V+ consiste en la posibilidad de ejecucin de
diferentes programas al mismo tiempo. As pues, se puede ejecutar, por ejemplo, un programa de control
y otros programas adicionales. El sistema administra la ejecucin de cada programa como una tarea
independiente. El sistema V+ cuenta con siete tareas disponibles. El modo de ejecucin del programa
depende de la tarea que se use y del tipo del programa a ejecutar. e las tareas e!istentes, la n"mero # es
la ms significati$adado que se usa generalmente para la ejecucin del programa de control del robot, y
es por tanto la tarea de ms alta prioridad.
%as instrucciones de un programa se ejecutan normalmente de manera secuencial, aunque e!isten
instrucciones como &# '# , (A%%, )*...&# '# , +A)', S'# ,, E'(. que pueden $ariar el flujo de
ejecucin del programa.
Una caracterstica particular y mu- potente de V+ es el proceso asncrono, que consiste en la
capacidad del sistema para responder a e$entos .se/ales e!ternas o errores0 cuando estos ocurren. Si est
1abilitado el manejo de e$entos, cuando alguno de estos ocurre, se produce la ejecucin de un programa
especfico, llamado rutina de reaccin, como si de una instruccin (A%% se tratara. Se llama ,roceso
Asncronoporque la ejecucin no est sincronizada con el flujo normal del programa.
%os procesos asncronos se 1abilitan con las instrucciones 2EA(', 2EA('E y 2EA('). (ada una
de las tareas usa estas instrucciones para preparar el procesado independiente de los e$entos. Una rutina
de reaccin se ejecuta solamente si la prioridad del programa es menor que la de la reaccin. El
programa principal .normalmente el programa de control0 se ejecuta 1abitualmente con prioridad cero,
mientras que la menor prioridad que puede tener una reaccin es uno. e esta forma, la reaccin puede
interrumpir normalmente el programa principal. (uando se ejecuta una rutina de reaccin, la prioridad
del programa se ajusta automticamente a la prioridad de la reaccin para e$itar que sea interrumpido
por reacciones de igual o menor prioridad. Al salir de la rutina de reaccin, el programa principal
recupera la prioridad que tena anteriormente.
Programa ejemplo
A continuacin se presenta un programa de ejemplo en el que el robot 1a de realizar operaciones de
manipulacin. En el programa se introduce un ejemplo del concepto de ejecucin concurrente .ejecucin
de $arios programas en paralelo0 - de la 1abilitacin de un proceso asncrono para la gestin de errores.
El robot 1a de realizar una tarea de pick and place entre posiciones $ariables calculadas en un ordenador
que se encarga de recibir - transmitir mensajes al robot. %os dos programas, el de comunicaciones con la
estacin y el de control del robot se ejecutan en paralelo.
El programade comunicacin tendr el siguiente aspecto3
.,2# &2A4comunicai0
5,2# &2A4AE (# 4U6)(A()# 6(# 6 %A ES'A()# 6
lu7est 8 9:
1a-7cod7fun8 *A%SE
;mens ttir 8 < <
5 asigna a la unidad lgica de la estacin el $alor 9#
5 indica que no 1a- cdigo de funcin disponible
5 el mensaje a transmitir es una cadena $aca
250 Fundamentos de robtica
hay_syst_err = FALSE ; indica que no hay error del sistema
;CODIGOS DE ERROR
er_robnoo! = "#$
;l%ICIALI&A EL CO%'ROL DEL RO(O'
S)EED "* ; se asi+na la ,elocidad del robot
READ- ; .re.ara al robot .osicion/ndole en la .osici0n de es.era
DE'AC1 2O3 ; se libera al robot de la tarea 4*
E5EC6'E 7robot83 ; se e9ecuta el .ro+rama de control del robot con la tarea 47
; a .artir de aqu8 los dos .ro+ramas se e9ecutan en .aralelo
;ES'A(LECI:IE%'O DE LA CO%E5I;% RO(O'<ORDE%ADOR
7* '-)E= Es.erando establecer la cone>i0n = ;mensa9e .or .antalla
A''AC1 2lu_est?O3 ; se asi+na la l8nea de comunicaci0n al .ro+rama
;se establece un bucle que controla si la comunicaci0n se reali@a con A>ito
IF IOS'A' 2lu_est?O3 <= '1E%
'-)E =Error al intentar establecer la comunicaci0n BBBB=
DE'AC1 2lu_est3 ;libera la unidad l0+ica de la tarea
GO'OI*
ELSE
'-)E= Robot conectado a la estaci0n=
E%D
;RECE)CIO% - DECODIFICACIO% DE ORDE%ES
;se establece un bucle que com.rueba el estado del canal de comunicaci0n y lee el mensa9e manC
dado .or el ordenador Si hay un error del sistema se en,8a un mensa9e tra,As del canal l0+ico y se
lee el nue,o mensa9e
"* DO
IF 2hay_syst_err3 '1E%
DRI'E 2lu_est3 Emens_ttir? FS
E%D
READ 2lu_est? ? 73 Emens_rbdo
6%'IL 2IOS'A'2lu_est?O3 <> <"#$3
;se com.rueba el estado del canal de comunicaci0n com.robando que la rece.ci0n es correcta
IF IOS'A'2lu_est?O3 <= '1E%
'-)E =iostat errorBBB=? IOS'A'2lu_est?O3
'-)E =Rece.ci0n incorrecta de orden=
DE'AC1 2lu_est3 ;se libera la unidad l0+ica de la tarea asi+nada
GO'O 7*
E%D
Programacin de robots 251
;se asigna el cdigo de la funcin recibida
codfun= ASC($MID($mens_rbdo, 1,1))
;EEC!CI"# DE "$DE#ES
;se com%rueba si el robo& es&' lis&o( Si lo es&') se da %aso al %rograma de con&rol, si no, se en*+a un
mensa,e diciendo -ue el robo& no es&' %re%arado
I. ((S/A/E(l) <> 0) "$ (cod fun = = 1)) /2E#
3a4_cod_fun =/$!E ;da %aso al %rograma del robo& -ue es&aba en es%era ac&i*a(
5AI/ (#"/ 3a4_con_fun) ;es%era a -ue se 3a4a e,ecu&ado la orden
E6SE
$mens_&&ir = $C2$(789cod_fun)9$I#/:(er_rob(no(o;)
E#D
;/$A#SMISI"# DE ME#SAES
5$I/E (lu_es&) $mens_&&ir, <S ;se en*+a el mensa,e a &ra*=s de la unidad lgica
;se com%rueba si 3a4 error en la &ransmisin( En ese caso se res&ablece la cone>in
I. I"S/A/(lu_es&) <="/2E#
/?@E AE$$"$ en la &ransmisin de A
/?@E ASC($MID($mens_&&ir, 1,1))
DE/AC2 (lu_es&) ;se libera el canal de comunicacin
B"/" 18 ;se res&ablece la cone>in
B"/808
(E#D
;es%era a una nue*a orden
;fin del %rograma de comunicacin
END
3a4_s4s&_err = .A6SE ;indica -ue no 3a 3abido error
El %rograma de con&rol del robo& se encarga de e,ecu&ar los cdigos de funcin %asados %or el orC
denador en $cod_fun 4 de*uel*e el mensa,e $mens_&&ir( SegDn el cdigo de funcin recibido, el robo&
%uede realiEar &res &areasF inicialiEacin, &area de pick &place 4 %arada(
En el %resen&e e,em%lo slo se mues&ra la %rogramacin de la &area de pick &place, %udiendo el
lec&or realiEar el e,ercicio de com%le&ar las o&ras dos &areas( El %rograma de con&rol, %odr+a &ener el
siguien&e as%ec&oF
(@$"B$AM robo&&)
;I#ICIA6IGACI"# DE 6AS HA$IA:6ES
al&ura = 08
ra%ido = 178
len&o =I8
;indica la al&ura de a%ro>imacin 4 salida en mil+me&ros
;indica la *elocidad r'%ida
;indica la *elocidad len&a
252 Fundamentos de robtica
;PUNTODE REENTRADATRAS SYST_ERR
TYPE "El programa de control ha sido relanzado"
REACTEerrores ;hailitael proceso as!ncrono de tratamiento de errores
"# $A%T&ha'_cod_()n* ;espera hasta +)e est, disponile )n c-digo de ()nci-n
TYPE "C-digoreciido". cod ()n ;indica a tra/,s del monitor el c-digo +)e se ha reciido
CASEcod ()n O0
1A2UE 3 4 ;%N%C%A2%5AC%ON
;a+)! se incl)ir!a el c-digo de inicializaci-n
1A2UE " 4 ;PARADA
;a+)! se incl)ir!a el c-digo correspondiente a la parada
1A2UE 6 4 P%C7 8 P2ACE
TYPE "Reciida la orden de P%C7 8 P2ACE"
ATTAC9 &O* ;Asigna al programa la tarea n:mero
SETpos_in =TRANS&;63.<3O.="6.#.3>#.;=*;indicael p)nto de recogida de las piezas
SET pos_de? @ TRANS&""A.B=;>.A3".#.3>#.;=*;indicael p)nto de de?ada de las piezas
;comienzala operaci-n de picCing
SPEEDrapida A2$AYS ;selecciona la /elocidad
ACCE2 D#. A= ;selecciona la aceleraci-n
APPROposjn,alt)ra ;se aproEima al p)nto de recogida a )na distancia "alt)ra"
SPEEDlenta ;red)ce la /elocidad
FO1E pos_in ;se m)e/e al p)nto de recogida
C2OSE% ;cierra la pinza
DEPARTS alt)ra ;se separa hasta )na distancia "alt)ra"
;operaci-nde de?ada de la pieza
SPEEDrapida A2$AYS ;selecciona la /elocidad
ACCE2 D#.A= G ;selecciona la aceleraci-n
APPROpos_de?. alt)ra ;se aproEima al p)nto de de?ada a )na distancia "alt)ra"
SPEEDlenta ;red)ce la /elocidad
FO1E pos_de? ;se m)e/e al p)nto de de?ada
OPEN% ;are la pinza
DEPARTS alt)ra ;se separa hasta )na distancia "alt)ra"
GEND ;(in de la instr)cci-n CASE
ha'_cod_()n@ 0A2SE
HOT#"#
GEND
;indica +)e 'a no ha' c-digo de ()nci-n
;regresa al estado de espera
;(in del programa de control
Por :ltimo. se m)estra )n e?emplo de c-mo ser!a el programa de tratamientode erroresG
r
I
Programacin de robots 253
.PROGRAM errorest)
TYPE "RUTINA DE TRATAMIENTO DE ERRORES DEL SISTEMA V+"
TYPE "Error nmero : ", ERROR(!)
TYPE "Mens"#e: ", $ERROR(ERROR(!%
error & A'S(ERROR(!% ("s)*n" e! error +,e se -" .ro/,0)/o
$0o/1er & $INT'(error) (0om.r,e2" 0,3! es e! error
-"41s4st1err & TRUE ()n/)0" +,e se -" .ro/,0)/o ,n error
-"40o/ 5,n & 6ALSE ()n/)0" +,e no -"4 07/)*o /e 5,n0)7n
E8E9UTE : err1ro2otO
9Y9LE.END:
RETURN
.END
(e#e0,t" e! .ro*r"m" err1ro2ot "s)*n3n/o!e !" t"re" :
(5)n /e! .ro*r"m" /e tr"t"m)ento /e errores
.PROGRAM errro2ott)
A'ORT ;
9Y9LE.END ;
E8E9UTE ; ro2ot<)
("2ort" !" e#e0,0)7n /e! .ro*r"m" /e 0ontro! /e! ro2ot
(e#e0,t" e! .ro*r"m" /e 0ontro! /e! ro2ot
("s)*n3n/o!e !" t"re" =;
A'ORT:
.END (5)n /e! .ro*r"m" errro2ott)
8.5. BIBLIOGRAFA
>A''?@AA'' Ro2ot)0s, RAPID Programmig Manual, 1994.
>ADEPTB?A A/e.t Te0-no!o*4 In0., Adept !Programming Manual, 19"9.
>AM'LERBCAAm2!er, A.P, 9"meron, S.A. 4 9omer, D.6., "A,*ment)n* t-e RAPT Ro2ot L"n*,"*e",
en: #anguages $or %ensor&'ased (ontrol )n Robotics (U.Rem2o!/ 4 D. E7rm"nn E/.), ... FGH
F;I. S.r)n*er Ver!"*, 'er!)n, ;?BC.
>'ARRIENTOSBCAA. '"rr)entos, %istema operati)o * lengua+e de programacin para robots dotados
de sensores, Tes)s Do0tor"!, DISAM, Un)Jers)/"/ Po!)tK0n)0" /e M"/r)/.
>'LUMEBCA '!,me, C. 4 L"Mo2, N., Programming #anguages $or Industrial Robots, S.r)n*erVer!"*,
'er!)n, ;?BC.
>'ONNERB:A 'onner, S. 4 S-)n,D.G, "A 9om."r"t)Je St,/4 o5 Ro2ot L"n*,"*es", (omputer, ;:, ..
B:?C, ;?B:
Captulo 9
CRITERIOS DE IMPLANTACIN DE UN
ROBOT INDUSTRIAL
Del dicho al hecho hay gran trecho.
Refranero popular
Un robot industrial raramente trabaja como un elemento aislado, sino que forma parte de un proceso de
fabricacin que incluye muchos otros equipos. El robot, parte principal de la denominada clula de
trabajo robotizada, debe en general interactuar con otras mquinas, formando parte de un estructura de
fabricacin superior. En este captulo se abordarn, tanto desde un aspecto tcnico como econmico,
aquellos temas relacionados con la implantacin de un robot en un entorno industrial.
El primer aspecto considerado es el dise!o de la clula desde el punto de "ista del lay-out #esquema
de disposicinde equipos, mquinas y dems elementos de la planta$ y de la arquitectura de control. %e
trata de una cuestin importante para poder e&traer las m&imas prestaciones a un robot industrial
durante su e&plotacin, como tambin lo es el escoger el robot adecuado para una determinada
aplicacin. En este captulo se dan algunas indicaciones y se e&plican aquellas cuestiones a considerar
para tomar dicha decisin. 'a seguridad de la clula robotizada tambin es tratada de forma especial,
pues obliga a tener en cuenta consideraciones importantes en la fase de dise!o, desarrollo y e&plotacin.
%e e&ponentambinalgunas indicaciones de cmo realizar la justificacin econmica de la implantacin
de una clula robotizada. (inalmente, se muestra una imagen actualizada de cul es la situacin del
mercadode robots en Espa!a.
255
254 Fundamentos de robtica
[CRAIG-89]Craig, JI., "Robot Programming Languages and Systems", en: Introduction to Robotics
Mechanies and Control, 2 edi!ion" Addison-#es$ey Pub$is%ing Com&any, Reading, 'assa!%u(
sets, )989"
[*+LI,-8-]*e$i,, .", /arrientos, A y Puente, +"A, "A Lo0 Le1e$ Language 2or Assemb$y Robots",
International Symposium on Robot Control 3S4R5C568-7,&&"89-::, )98-"
[*I;<+L-9:] *in=e$, R" et a$", "AL, A Programming System 2or Automation", Memo AIM-243, Stan(
2ord Arti2i!ia$ $nte$$igen!e Laboratory, )99:"
[*u-88] *u, <"S", Gon>a$e>, R"C" y Lee, C"S"G", "Lengua?es de Programa!i@n de Robots", en: Con
trol, eteccin, !isin e Inteli"encia, 'a!Gra0-Ai$$B$nterameri!ana, 'adrid, )988"
[<5CDsou-8)] <outsou"A, "A Sur1ey o2 'ode$-/ased Robot Programming Languages", AI
#or$in" %aper &o' 108. Ee&t o2 Arti2i!ia$ $nte$$igen!e, Cni1ersity o2 +dimburg%, )98)"
[LI+/+R'A;-99] Lieberman, L"I" y #es$ey, '"A", "ACD5PASS: An Automati! Programming
System 2or Com&uter Contro$$ed 'e!%ani!a$ Assemb$y", I(M )ournal o* Researeh &e+elo
pment, :, &&" 82)-888, )999"
[L5FG;5-82] Lo>ano-PHre>, D", "Robot Programming", Memo AIM-,-., 'assa!%usetts Institute o2
De!%no$ogy, )982"
[LIFA;5-9J] L@>ano-PHre>, D", "D%e Eesign o2 a 'e!%ani!a$ Assemb$y System", Al /ab' 0echnical
Report, 'assa!%usetts $nstitute o2 De!%no$ogy, )99J"
[P5PPL+SD5;+-98] Po&&$estone, RK", Amb$er, AP y /e$$os, $", "RAPD: A Language 2or Ees!ribing
Assemb$ies", 0he Industrial Robot, -, &&" )8)-)89, )998"
[R+'/5LE-8J] Rembo$d, C", "Programming o2 Industria$ Robots, Doday and in t%e *uture", en:
/an"ua"es *or Sensor-(ased Control in Roboties,12'Rembold y <" A@rmann +d"7, &&"8-2:" S&rin(
ger-.er$ag, /er$in, )98J"
[R+'/5LE-8-] Rembo$d, C", /$ume, C. y *romm%er>, /K", "D%e Pro&osed Robot So2t0are Inter2a!es
SRL and IREADA", Roboties &Computer-Inte"rated Manu*acturin", .o$"2 ;o 8B:, &&" 2)9-22-,
)98-"
[R5ERIGC+F-9:] RodrLgue>, C"*"", %lani*icacin y control de sistemas multirobot en tareas coordi
nadas, Desis Eo!tora$, EISA', Cni1ersidad Po$itH!ni!a de 'adrid, )99:"
[SDAM/LI-92] StaNb$i, S"A", 3u4a !A/ JI, 5--2'
[DA4L5R-82] Day$or, R"A", Surnmers, P"E" y 'eyer, K"'", "A'L: A 'anu2a!turing Language", 0he
International )ournal o* Robotics Research, .o$") ;o 8, &&" )9--J, )982"
[.oL>-88] .o$>, R"A, "Re&ort o2 t%e Robot Programming Language #or=ing Grou&: ;AD5
#or=s%o& on Robot Programming Languages", I666 )ournal o* Robotics and Automation, .o$"2
;o ), &&" 8J-9O, )988"
256 Fundamentos de robtica
9.1. DISEO Y CONTROL DE UNA CLULA ROBOTIZADA
El proyecto e implantacin de un sistema robotizado implica la consideracin de un gran nmero de
factores, que van desde el posible rediseo del producto, hasta la definicin detallada dellay-out o plano
de implantacindel sistema (Figura 9.!.
"unto con la seleccin m#s adecuada del robot para la aplicacin, habr# que definir, e incluso disear,
los elementos perif$ricos pasivos (mesas, alimentadores, utilla%es, etc.! o activos (manipuladores
secuenciales, m#quinas eN, etc.! que intervienen en la c$lula, y situarlos f&sicamente en el sistema.
Figura 9.1. Ejemplo del/ay-out de una clula robotizada de fabricacin de calzado.
T
W
!
Criterios de implantacin 257
Asimismo ser preciso definir y seleccionar la arquitectura de control, tanto hardware como software,
que todo sistema flexible de fabricacin debe incluir.
La definicin del lay-out del sistema es un proceso iterativo del que debe resultar la especificacin
del tipo y nmero de robots a utilizar, as como de los elementos perifricos, indicando la disposicin
relativa de los mismos. !n este proceso iterativo es clave la experiencia del equipo tcnico responsable
del dise"o. La utilizacin de herramientas informticas, como sistemas #A$, simuladores especficos
para robots y simuladores de sistemas de fabricacin flexible facilitan enormementeesta tarea.
%n simulador de sistemas robotizados permite de manera rpida y eficiente evaluar las diferentes
alternativas en cuanto al robot a utilizar y la disposicin fsica de todo el sistema. %tilizando la
interaccin &rfica, se puede analizar qu robot de los existentes en la librera del pro&rama se adapta
me'or a la tarea pro&ramada, detectando posibles colisiones y verificando el alcance ()*$)+,%!-./01. %n
simulador de sistemas de fabricacin flexible permite dimensionar adecuadamentela clula, informando
sobre su productividad, rendimiento y comportamiento ante cambios de la demanda o situaciones
imprevistas 2averas, cambios en el producto, etc.3. Asimismo permite ensayar diferentes estrate&ias de
control de la clula encaminadas a optimizar su funcionamiento (#A#+./41.
9.1.1. Disposicin del robot en la clula de trabajo
A la hora de decidir la disposicin del robot en la clula, cabe plantearse cuatro situaciones bsicas5
Robot en el centro de la clula
!n esta disposicin el robot se sita de modo que quede rodeado por el resto de elementos que
intervienen en la clula. 6e trata de una disposicin tpica para robots de estructura articular, polar,
cilndrica o 6#A)A, en la que se puede aprovechar al mximo su campo de accin, que presenta una
forma bsica de esfera.
-ona de
traba'o
7iezas
)obot
a3
b)
Figura 9.2. Disposicin del robot en a) el centro de la clula y b) en lnea.
258 Fundamentos de robtica
Figura 9.3. Robot en el centro de una clula de pulido del piezas de reloj.
(Cortesa de KUKA.)
La disposicin del robot en el centro se usa frecuentemente en aquellas aplicaciones en las que un
robot sirve a una o varias mquinas (carga-descarga de mquinas herramientas), as como en las
aplicaciones de soldadura al arco, paleti!acin o ensamblado, en las que el robot debe alcan!ar diversos
puntos fi"os dentro de surea de traba"o (Figura 9.#-a y Figura 9.3).
$obot en lnea
%uando uno o varios robots deben traba"ar sobre elementos que llegan en un sistema de transporte, la
disposicinde robots en lnea es la-ms adecuada. (Figura 9.#-b.)
&l e"emplo ms representativo de esta disposicin son las lneas de soldadura de carroceras de
vehculos, en las que 'stos pasan secuencialmente frente a sucesivos robots alineados, cada uno de los
cuales reali!auna serie de puntos de soldadura.
&n este tipo de disposicin cabe diferenciar que el transporte sea de tipo intermitente o continuo. &n
el primer caso, en un momento determinado cada robot tiene delante una pie!a sobre la que reali!a las
operaciones establecidas. (na ve! acabadas 'stas, bien se espera a que todos los robots finalicen sus
tareas, para que entonces el sistema de transporte avance un puesto, o bien, si el sistema lo permite, da
salida a la pie!a que proceda, quedando disponible para recibir una nueva.
)i el transportees continuo, esto es, si las pie!as no se detienen delante del robot, 'ste deber traba"ar
sobre la pie!a en movimiento, para lo que el transporte deber limitar su velocidad de modo que la pie!a
quede dentro del alcance del robot durante al menos el tiempo de ciclo.
T
Criterios de implantacin 259
1 , ;
Robot mvil
En ocasiones es til disponer al robot sobre una va que permita su desplazamiento lineal de manera
controlada (Figura 9.4). Esta posibilidad permite, por eemplo, seguir el movimiento de la pieza en el
caso de que !sta se desplace sobre un sistema de transporte continuo, de modo que la posicin relativa
entre pieza " robot durante el tiempo que dura el proceso se mantenga #ia. $ara ello es necesario una
precisa sincronizacin de los dos movimientos% transporte de la pieza " transporte del robot, lo que se
puede conseguir con un acoplamiento mec&nico desembragable o mediante un adecuado control en
cadena cerrada de ambos transportes. En cualquier caso, una vez acabado el procesamiento de la pieza,
el robot debe regresar r&pidamente a su posicin inicial para recibir una nueva.
'tra situacin en la que el empleo del robot con capacidad de desplazamiento lineal es
particularmente ventaosa es cuando !ste debe cubrir un elevado campo de accin. $or eemplo, en la
pintura de carroceras de coc(es, el dotar al robot de este grado de libertad adicional permite que dos
robots de dimensiones medias () metros de radio de alcance apro*imadamente) lleguen con la
orientacin adecuada a todos los puntos de pro"eccin correspondientes a un coc(e.
+simismo, esta disposicin del robot puede utilizarse cuando !ste tenga que dar servicio a varias
m&quinas (por eemplo, para carga,descarga de m&quinas (erramientas), obteniendo el m&*imo
rendimientodel robot.
Figura 9.4. Disposicin de robot mvil sobre rail. (Cortesa de KUK.!
260 Fundamentos de robtica
Robot suspendido
La disposicin del robot suspendido es la intrnseca de un robot tipo prtico en la que ste queda situado
sobre el rea de trabajo. Pero adems de esta estructura de robot, es posible colocar un robot articular
invertido sobre la clula (Figura 9.5.
Las ventajas !undamentales que se obtienen en este segundo caso son las de un mejor
aprovec"amiento del rea de trabajo, pues de este modo el robot puede acceder a puntos situados sobre
su propio eje vertical.
Las operaciones tpicas donde se utili#a el robot suspendido son en aplicacin de ad"esivos o
sellantes, pro$eccin de material (pintura, acabado super!icial, etc., corte (c"orro de agua, lser, etc. $
soldadura al arco. %lgunos !abricantes incluso "an desarrollado modi!icaciones sobre sus robots bsicos,
tanto en su estructura mecnica como en su control, para !acilitar el uso del robot en esta disposicin.
Figura 9.5. Robot IRB 3200 proyectando cemento en disposicin suspendido.
(Cortesa de DlSAM!"M.#
T
I i : ~
Criterios de implantacin 261
9.1.2. Caractersticas del sistema de control de la clula de trabajo
Una vez establecidos los elementos operativos de la clula y su disposicin en la planta, el segundo
factor crtico en la definicin de la clula robotizada es la especificacindel sistema de control.
Una clula robotizada debe responder a las premisas de flexibilidad y automatizacin que justifican
su empleo. Para ello es imprescindible el establecimiento de un buen sistema de control que deber
realizar, entre otras, las siguientes funciones.
Control individual de cada una de las mquinas, transportes y dems dispositivos, incluidos
robots, que compongan la clula.
Sincronizacin del funcionamiento de los diferentes dispositivos entre s.
Deteccin, tratamiento y recuperacin si es posible de las situaciones anmalas de funcio
namiento que puedan presentarse.
Optimizacin del uncionamiento conjunto de los dispositivos de la clula, distribuyendo si
es posible las funciones de manera dinmica, para as evitar paradas por espera o acciones in
necesarias.
!nteraz con el usuario, mostrando la informacin adecuada para que en todo momento se co
nozca con el detalle necesario el estado del sistema, as como permitiendo que el operador ac
ceda, con las restricciones pertinentes, al funcionamiento del mismo.
!nteraz con otras clulas, para permitir la sincronizacin entre ellas, optimizando el funcio
namiento de un sistema de fabricacin flexible compuesto por varias clulas.
!nteraz con un sistema de control superior que realiza bsicamente funciones de supervisin
y actualizacin de programas cuando se diese un cambio en la produccin.
!stas funciones, que pueden ser necesarias en mayor o menor medida en el control de una clula
robotizada, se implementarn en un "ard#are que ser preciso definir y dimensionar. !n aquellas
ocasiones en las que la simplicidad de la clula $% permite, el propio controlador del robot podr
simultanear las funciones propias de control de sus ejes con el mando del resto de los dispositivos. Para
ello utilizar sus entradas&salidas digitales&analgicas, o si fuera necesario la posibilidad de incorporar
ejes externos servocontrolados.
'i por el contrario la clula incluye un mayor n(mero de dispositivos, algunos de los cuales incluso
disponen de su propio controlador, ser preciso disponer de una estructura jerarquizada en la que un
elementocentral )ordenador, P*+, etc., mantenga una comunicacincon el resto de los controladores.
!n cualquier caso, el correcto dimensionamiento del control de la clula es tarea que no debe
desestimarse, pues repercutir tanto en el coste de implantacin y desarrollo de la misma como en el de
explotacin.
262 Fundamente" de robtica
9.2. CARACTERSTICAS A CONSIDERAR EN LA SELECCIN
DE UN ROBOT
Cuando se desea robotizar un determinado proceso, el equipo de tcnicos responsable de esta tarea debe
seleccionar el robot ms adecuado. Para ello recurrir a su eperiencia y buen criterio, esco!iendo,
dentro del amplio mercado de robots eistente, aquel que me"or responda a las caracter#sticas necesarias
y buscandosiempre el adecuado compromiso entre precio y prestaciones.
Caract. !eomtricas
Tabla 9.1. Caractersticas a tener en cuenta para la seleccin de un robot
Caract. cinemticas
Caract. dinmicas
Tipo mo$imientos
%odo pro!ramaci&n
Tipo accionamiento
Comunicaciones
'er$icio pro$eedor
Coste
( )rea de traba"o
( *rados de libertad
(Errores de posicionamiento
( Distanciatras emer!encia
(Repeti$idad
( Resoluci&n
( Errores en el se!uimientode tra+ectorias
(Calidad de una l#nea recta, arco,...
( Precisi&ncuando se mue$e el m#nimoincrementoposible
(,elocidad nominal mima
( -celeraci&n+ deceleraci&n
( .uerza
( De a!arre
( Car!a mima
( Control de /uerza0par
(.recuencia de resonancia
(%o$imientos punto a punto
(%o$imientos coordinados
(Tra+ectoriascontinuas 1CP2
(Ense3anza 1!uiado2
(Tetual
(Elctrico 1c. alterna o c. continua2
(Neumtico
( 4idrulico
(E5' Di!itales5-nal&!icas
( Comunicacionesl#nea serie
(%antenimiento, 'er$icioTcnico, Cursos de /ormaci&n
~
!i
Criterios de implantacin 263
t :
ii
!'
La seleccin del robot ms idneo debe hacerse valorando una gran variedad de caractersticas,
siendo ste un proceso de difcil sistematizacin. Sin embargo, en general puede ser suficiente con
considerar un conjunto limitado.
n los catlogos de robots, los fabricantes proporcionan los valores de las prestaciones de sus
productos. stos valores estn con frecuencia medidos en condiciones ptimas, diferentes de las reales!
no obstante, sirven como medida comparativa para la seleccin del robot. "or otra parte, aun#ue hasta el
momento no e$iste una homologacin oficial para los robots industriales #ue garanticen la veracidad de
los datos de catlogo, s e$isten laboratorios con acreditado renombre en los #ue se realizan una serie de
test orientados a cuantificar las caractersticas de los robots con elevada e$actitud. ste es el caso del
instituto alemn%"& 'Stuttgart(.
Se van a comentar a continuacin las caractersticas ms destacadas #ue deben ser consideradas a la
hora de seleccionar un robot para una determinada aplicacin, ) #ue han sido recogidas de manera
resumida en la *abla +.,.
9.2.1. rea de trabajo
l rea de trabajo o campo de accin es el volumen espacial al #ue puede llegar el e$tremo del robot.
ste volumen est determinado por el tama-o, forma ) tipo de los eslabones #ue integran el robot
'.igura +./(, as como por las limitaciones de movimiento impuestas por el sistema de control. 0unca
deber utilizarse el efector colocado en la mu-eca para la obtencin del espacio de trabajo, )a #ue se
trata de un elemento a-adido al robot, ) en el caso de variar el efector el rea de trabajo se tendra #ue
calcular de nuevo.
n los catlogos suministrados por los fabricantes se suele indicar el rea de trabajo mediante un
dibujo acotado. 1uando la informacin es de tipo numrico, el rea de trabajo se indica mediante el
rangode recorrido de cada articulacin.
l robot debe elegirse de modo #ue su rea de trabajo 'o campo de accin( le permita llegar atados
los puntos necesarios para llevar a cabo su tarea. n este sentido, no debe olvidarse la necesidad de
incluir entre los puntos a acceder los correspondientes a puntos de recogida de piezas 'alimentadores(,
mesa de trabajo, puntos de salida de piezas, etc.
l #ue el robot pueda acceder a todo el espacio de trabajo no significa #ue 1 0 pueda hacer con
cual#uier orientacin. $istirn un conjunto de puntos, los ms alejados ) los ms cercanos, #ue
2nicamente se podrn acceder con unas orientaciones determinadas, mientras #ue otros puntos admitirn
cual#uier orientacin.
Se ha de tener en cuenta tambin la posible e$istencia de los denominados puntos singulares, #ue )a
fueron e$plicados en el epgrafe 3.4.4. Se trata de puntos con una determinada orientacin en el espacio
sobre los #ue, por ejemplo, no es posible realizar una tra)ectoria rectilnea, bien sea por#ue su ejecucin
implicarael movimiento a velocidad infinita de uno de los ejes, bien por#ue el valor de los ejes en ese
punto con esa orientacin se encuentre %ndeterminado.
La disposicin ptima de todos los elementos #ue compondrn la clula junto con el robot, es una
delicada tarea por el gran n2mero de variables a considerar. 0o basta con asegurarse de #ue todos los
puntos necesarios #uedan dentro del campo de accin, sino #ue se deber verificar #ue una vez situados
los dems componentes de la clula, el robot no colisione con ellos al efectuar sus movimientos.
264 Fundamentos de robtica
8000
3000 2500 2000
Figura 9.6. Configuracin y seccin del rea de trabajo del robot ROCCO.
Por este motivo, es de gran ayuda el empleo de programas de simulacingrfica (ROBeAD, GRASP,
TOROS, etc!, "ue dotados de un sistema de dilogo interactivo con el usuario, permiten seleccionar
mediante ensayo y error la disposicin ptima de la c#lula, pudi#ndose incluso ensayar diferentes ro$ots
almacenadospara tal efecto en memoria (%igura &'!
(
\
\
I
\
)
i r
I
Criterios de implantacin 265
Figura 9.7. Clula de soldadur a en la i ndustr i a de automoci n si mulada con ROBCAD.
(Cor tesa de TECNOMATIX.)
9.2.2. Grados de libertad
El nmero de grados de libertad con que cuenta un robot (GDL) determina la accesibilidad de ste su
capacidad para orientar su herramienta terminal. Es relativamente frecuente que el nmero de GDL de
los robots comerciales coincida con el nmero de articulaciones, es decir, que cada articulacin
representaun GDL.
La eleccin del nmero de grados de libertad necesarios viene determinada por el tipo de aplicacin.
!", en muchas operaciones de manipulacin, tpick ! place, paleti#ado) los ob$etos se recogen %
depositan sobre planos hori#ontales. En estos casos, un robot con & GDL para posicionar, a lo sumo
uno m's para orientar (giro en tomo a un e$e vertical), es suficiente. !in embargo, en otras aplicaciones,
es preciso orientar la herramienta en el espacio o acceder a posiciones complicadas, siendo precisos ( o
incluso m's grados de libertad. plicaciones t)picas que precisan de ( GDL pueden ser la pintura, la
soldaduraal arco o la aplicacin de sellantes.
*on cierta frecuencia los fabricantes de robots proporcionan un nmero determinado de grados de
libertad ampliables (en + o ,) de manera opcional. Este grado e-tra se a.ade al robot en unos casos en su
e-tremo en otros en su base.
En general ha% que considerar que el aumento del nmero de grados de libertad lleva pare$o un
considerable aumento del coste del robot. En ocasiones, ste puede suplirse con el empleo de un utilla$e
apropiado% con el redise.o de las pie#as que entran a formar parte de la instalacin. s), en tareas en las
266 FundamentoS de robtica
que es preciso acceder a piezas grandes o complejas, stas pueden ir montadas sobre mesas
posicionadoras u orientadoras, que disponen de un nmero finito o infinito de posiciones alternativas,
controladas de manera sincronizada con el robot. En el primer caso, el accionamiento puede ser
neumtico o hidrulico, siendo su coste comparativamente reducido. En el segundo caso
(posicionamientocontinuo), el precio de estos perifricos auxiliares es elevado, debindose escoger con
cuidado la solucina adoptar.
En cualquier caso, ! para tareas mu! espec"ficas, se pueden desarrollar robots con ms de # $%&
como configuracin bsica. 'e les suele denominar robots redundantes, aunque esta terminolog"a se
aplica de forma ms espec"fica a aquellos robots que poseen ms $%& que los que implica la tarea que
realizan, independientemente de cul sea el nmero de los mismos. En la actualidad los valores t"picos
en cuanto al nmero de $%& var"a entre tres ! seis.
9.2.3. Precisin, repetibilidad y resolucin
&as ventajas del robot frente a otras mquinas en muchas de las aplicaciones actuales se basan adems
de en la flexibilidad ! velocidad, en el bajo error de posicionamiento con el que realizan su trabajo. (ara
la definicin de este error es necesario tener en cuenta tres conceptos complementarios entre s", como
son) la precisin, la repetibilidad ! la resolucin. %e entre los tres, el dato normalmente suministrado por
los fabricantes es el de repetibilidad ! ste es el utilizado a la hora de seleccionar un robot u otro por su
exactitud.
&a *igura +., presenta grficamente estos tres conceptos. El origen de cada uno de ellos es diferente-
su definicin! causa se indica a continuacin)
(untos
alcanzados
real
(linto ......
deseado
(recisin
...)
/esolucin
'---'
/epetibilidad
(untos
Figura 9.8. Visualizacin de los conceptos de resolucin, precisin ! repetibilidad.
0
i
I
I r
Criterios de implantacin 267
Resolucin: Mnimo incremento que puede aceptar la unidad de control del robot. Su valor est
limitado por la resolucin de los captadores de posicin y convertidores AJD y DI A, por el
nmero de bits con los que se realizan las operaciones aritmticas en la CP. y por los ele!
mentos motrices, si estos son discretos "motores paso a paso, sistemas neumticos todo nada,
etc.#
Precisin: $istancia entre el punto pro%ramado "normalmente de manera te&tual# y el valor
medio de los puntos realmente alcanzados al repetir el movimiento varias veces con car%a y
temperatura nominales. Su ori%en se debe a errores en la calibracin del robot "punto de sincro!
nismo por e'emplo#, de(ormaciones por ori%en trmico y dinmico, errores de redondeo en el
clculo de la trans(ormacin cinemtica "especialmente en las cercanas de puntos sin%ulares#,
errores entre las dimensiones reales y tericas del robot, etc.
Repetibilidad: )adio de la es(era que abarca los puntos alcanzados por el robot tras su(icien!
tes movimientos, al ordenarle ir al mismo punto de destino pro%ramado, con condiciones de
car%a, temperatura, etc., i%uales. "*ormalmente se considera la banda que abarca el ++, de los
puntos respecto a la media.# -l error de repetibilidad es debido (undamentalmente a problemas
en el sistema mecnico de transmisin como rozamientos, .istresis, zonas muertas (backlash).
-l error de repetibilidad tiene especial importancia en aquellos robots que son pro%ramados por
aprendiza'e, pues entonces no a(ectan los debidos a la resolucin ni precisin. /os valores normales de
error de repetibilidad de robots industriales comerciales varan entre los 01 milmetros y 02,2l
milmetros.
-n el valor total del error de posicionamiento de un robot, a(ectan una serie de (actores, como la
lon%itud de sus brazos, car%a mane'ada, tipo de estructura 3"la cartesiana no precisa trans(ormacin
.omo%nea, evitndose errores de clculo#, que pueden dar una idea %eneral sobre la calidad del
posicionamiento(inal de su e&tremo. As, por lo %eneral, los robots cartesianos y los de reducidas dimen!
siones son ms precisos "en el sentido %lobal# que otros como articulares o robots de %ran enver%adura.
2tras medidas relativas a los posibles errores de posicin de un robot son las relacionadas con la
precisin con que un robot, que dispon%a de capacidad para ello, recorre una determinada trayectoria
pro%ramada, por e'emplo una lnea recta. -n este caso, los posibles errores se ven a(ectados por las
mismas causas que los anteriores ms por aquellas derivadas del al%oritmo interpolador de la trayectoria
y de su control dinmico.
As, el nmero de puntos con que se interpole una trayectoria determinar la precisin con que el
robot la si%ue. -ste nmero de puntos est limitado por el tiempode clculo de la trans(ormacin inversa
"dependientede la estructura del robot, potencia de clculo del sistema de control, etc.#, as como por la
velocidad con que se desee recorrer la trayectoria pro%ramada "l%icamente una menor velocidad
posibilitarun mayor nmero de puntos interpolados#.
9.2.4. Velocidad
Como ya se .a indicado, la velocidad a la que puede moverse un robot y la car%a que transporta, estn
inversamenterelacionados. 4anto es as que en muc.as ocasiones los datos proporcionados en catlo%o
sobre la velocidad de movimiento del robot se dan para di(erentes valores de la car%a a transportar. $e
268 Fundamentos de robtica
igual forma y como es lgico, tambin suele existir una relacin de orden inverso entre el error de
posicionamientoy la velocidad del robot.
La velocidad de movimiento de un robot puede darse por la velocidad de cada una de sus
articulaciones o por la velocidad media de su extremo, siendo esta ltima ms til para el usuario, pero
ms imprecisa. El valor de la velocidad nominal de movimientode un robot es un dato relevante para el
clculo de los tiempos de ciclo, sobre todo en robots destinados a tareas de manipulacin o ensamblaje.
No obstante, hay ue considerar ue el dato proporcionado normalmente corresponde a la velocidad
nominal en rgimen permanente. !ara alcan"ar este rgimen es preciso ue el movimiento del robot sea
suficientemente largo. En otro caso, los tiempos de arranue y parada son proporcionalmente ms
significativosue el correspondiente al movimiento a velocidad nominal.
En la prctica, en la mayor#a de los casos los movimientos del robot son rpidos y cortos, con lo ue
la velocidadnominal es alcan"ada en contadas ocasiones. !or este motivo, la medida del tiempo de ciclo
no puede ser obtendia a partir de la velocidad, siendo sta una valoracincualitativa del mismo. En ve"
de este dato, algunos robots indican el tiempo empleado en reali"ar un movimiento t#pico $un pick &
place, por ejemplo%.
Los valores habituales de velocidad del extremo oscilan entre &y ' mis con carga mxima.
9.2.5. Capacidad de carga
La capacidad de carga del robot a seleccionar para una determinada tarea viene condicionada por el
tama(o, la configuracin y el sistema de accionamiento del propio robot. !or otra parte, al evaluar la
carga a manipular por el robot debe considerarse el peso de las pie"as a manipular y el propio peso de la
herramienta o pin"a ue emplee el robot colocada sobre la mu(eca $en muchas ocasiones superior al de
los propios objetos%. )e debe tener en cuenta adems de la carga, el momento ue la pie"a a transportar
genera en el extremo del robot. !ara ello el fabricante puede proporcionar un cuadro en el ue se indica
la disminucinde la posible carga a transportar para no disminuir prestaciones a medida ue el centro de
gravedadde la misma se aleja del centro de la mu(eca.
El dato ue normalmente se proporciona en la hoja de caracter#sticas del robot, corresponde a la carga
nominal ue ste puede transportar sin ue por ello disminuyan sus prestaciones dinmicas, y siempre
considerandola configuracin del robot ms desfavorable. )in embargo, es posible aumentar esta carga
hasta un cierto l#mite, siempre y cuando se pueda admitir una disminucin en la velocidad de los
movimientosdel robot e incluso en su precisin.
Los valores ms frecuentes de capacidades de carga var#an entre *+*,-g, aunue se pueden encontrar
robots ue transporten ms de media tonelada.
9.2.6. Sistema de control
La potencia de la unidad de control del robot determina en gran medida sus posibilidades. Las
caracter#sticas del control del robot hacen referencia por una parte a sus posibilidades cinemticas $tipo
de trayectorias% y dinmicas $prestaciones dinmicas del robot%, y por otra parte a su modo de
programacin.
En cuanto a las posibilidades cinemticas es muy importante tener en cuenta la aplicacin a reali"ar.
!ara muchas aplicaciones (pick & place, por ejemplo%, es suficiente con un control del movimiento
Criterios de implantacin 269
punto a punto (PTP) en el que slo es relevante el punto final a alcanzar por el robot y no el camino
seguido. En otras, por el contrario, la trayectoria continua (CP) descrita por el extremo del robot es
fundamental (soldadura al arco). Casi todos los robots incorporan la posibilidad de realizar trayectorias
en lnea recta y con interpolacin circular. Estas posibilidades vienen normalmente indicadas en las
especificaciones t!cnicas del robot.
"n primer dato relativo al control din#mico de un robot, es el que indica si !ste se efect$a en cadena
abierta o cerrada. El primer caso no es frecuente si bien se emplea cuando no se prev!n grandes inercias.
%u implementacin se realiza normalmente con motores paso a paso, simplificando notablemente la
comple&idadde los algoritmos de control.
'as caractersticas del control din#mico del robot, como velocidad de respuesta y estabilidad, son de
particular importanciacuando !ste debe mane&ar grandes pesos con movimientosr#pidos. En estos casos,
un buen control din#mico asegura que el extremo del robot no presente oscilaciones ni errores de
posicionamiento. El sobrepasar el punto de destino (overshoot) por una elevada inercia, puede originar
colisiones de graves consecuencias.
(ormalmente las prestaciones del control din#mico no son indicadas explcitamente como una
caracterstica a conocer por un posible usuario. )lgunos sistemas de control de robots permiten variar,
incluso en mitad de la e&ecucin de un programa, algunas de las caractersticas del control din#mico (su
accinPo* en caso de que se trate de un servo).
+tra importante caracterstica relacionada con el control din#mico,ace referencia a la posibilidad de
realizar un control de esfuerzos de manera selectiva en alguna de las articulaciones o e&es cartesianos.
Esta posibilidad, que implica el empleo de sensores de esfuerzos, es fundamental en aquellas
aplicaciones en las que la pieza manipulada deba entrar en contacto con alg$n ob&eto durante la
realizacinde la tarea (ensambla&e, desbarbado, pulido, etc.).
En cuanto a las caractersticas relacionadas con el m!todo de programaciny las posibilidades que
!ste ofrece, puede decirse que una primera divisin entre programacin por guiado y programacin
textual es suficiente como para decidirse sobre el empleo de un robot u otro para una determinada
Tabla 9.2. Carctersticas deseables en un robot segn su aplicacin
P*(T"-) P)'ET*.)C*/(
Programacin por guiado
Campo de accin similar al ,umano
Estructura antropomrfica
0 grados de libertad
Elevada capacidad de carga
-elacin grande entre #rea de traba&o y tama1o del robot
Control PTP
P-+CE%)2+ E(%)34')2+
%istema de programacin
560 grados de libertad
Campo de accin similar al ,umano
Control de trayectoria continua
Elevada precisin y rapidez
Campo de accin similar al ,umano
Potencia del sistema de programacin
%istema sensorial
270 Fundamentos de robtica
aplicacin. As, una aplicacin de pintura debe realizarse con un robot cuya programacin se efecte
fundamentalmente mediante guiado, y ms especficamente, con un sistema en el que la unidad de
control memorice automticamente el camino por el que se desplaza el extremo del robot durante la
etapa de programacin. Por el contrario, en un robot destinado a tareas de paletizado ser aconsejable la
programacintextual.
Otras caractersticas importantes relacionadas con el modo de programacin son las relatias al
manejo de entradas salidas, posible estructuracin de los programas !manejo de subrutinas, bucles, etc.",
posibilidad de atencin de interrupciones y modificacin de trayectorias atendiendo a se#ales externas,
sistemasde programaciny control desde un dispositio externo !computador",etc. $stos aspectos ya se
comentan con ms detalle en el epgrafe %.&, dedicado a los sistemas de programacin para robots
industriales.
Tabla 9.3. Caractersticas tcnicas de algunos robots comerciales
'abri( )odelo Aplicacin *onfi( +,- Alcance *arga .eloc. /epeti Acciona( *ontrol
cante guracin 0orizon. mxima mxima bilidad miento trayec.
!mm" !1g" !mm2s" !mm"
A33 4/3&566 7so Angular 8 9:5& 10 5666 6.6% $l;ctrico P<P*P
general !c.a."
</ :66& Pintura Angular 8 &:=5 : &666 9.6 $l;ctrico P<P*P
(c.a.)
Adept Adept 7so >*A/A 5 96=6 &: 99666 6.6&: ,irecto P<P*P
<0ree general !c.c."
,$A 3/A.O )edicin *artes. ? x@&:&: :66 6.? $l;ctrico P<P*P
&&6: y@99%: !c.c."
'AA7* A/*)ate >old. Arco Angular 8 986: 9& 9?: 6.9 $l;ctrico P<P*P
9&62>(9& !B2s" !c.a."
-(4OOO *orte lser Polar : 9&66 : 6.6: $l;ctrico P<P*P
!c.a."
Cremlin AC/?666 Pintura Angular = &:66 9: &666 9.6 Didru( *P
lico
C7CA C/ 9&: 7so Angular 8 &596 9&: 9666 6.& $l;ctrico P<P*P
general !c.a."
>taEbli P7)A:86 7so Angular 8 F66 5 5=66 6.9 $l;ctrico P<P*P
general !c.c."
4nestigar
/GF6 7so Angular 8 F66 9& F%66 6.6& $l;ctrico P<P*P
general !c.e"
Has1aIa )otoman 7so Angular 8 9==: 8 956 6.9 $l;ctrico P<P*P
>C 98(8
general !B2s" !c.a."
)otoman )ontaje >*A/A 5 9F:6 86 6.& $l;ctrico P<P*P
S604 )anipular !c.c."
Criterios de implantacin 271
Existen otras consideraciones, adems de las meramente tcnicas, a la hora de seleccionar el robot
ms adecuado para robotizar una proceso. As, es importante considerar el servicio tcnico que
proporciona el fabricante (de postventa, mantenimiento, formacin, actualizacin) que l!icamente
variar se!"n la distribucin !eo!rfica del lu!ar de implantacin de la fbrica o dele!acin del
fabricante del robot. #ambin ser importante considerar el costo posibilidad de amortizacon del
robot, pues un robot ms barato, con menos prestaciones, puede resolver correctamente la aplicacin
en cuestin, pero ser difcilmente adaptable a otras aplicaciones futuras.
$a #abla %.& muestra una primera aproximacin de las caractersticas a tener en cuenta para la
eleccin de un robot en una determinada aplicacin. Estas indicaciones no tienen porqu ser vlidas en
todas las situaciones, pero se cumplen de forma !eneral. En la #abla %.' se proporcionan las
caractersticas tcnicas ms relevantes de al!unos robots comerciales.
9.3. (E)*+,-A- E. ,.(#A$A/,0.E( +010#,2A-A(
El tema de la se!uridad prevencin de accidentes en los sistemas robotizados, suele tratarse de manera
mar!inal en casi todos los textos dems fuentes de informacin que sobre robots industriales existen.
(in embar!o, ste es un aspecto crtico durante el desarrollo explotacin de una clula robotizada. $as
consideraciones sobre la se!uridad del sistema robotizado cobran especial importancia
fundamentalmente por dos razones. En primer lu!ar, por el motivo intrnseco de que el robot, como se
analizar ms adelante, posee maor ndice de ries!o a un accidente que otra mquina de
caractersticas similares. En se!undo lu!ar, por un aspecto de aceptacin social del robot dentro de la
fbrica, aceptacin difcil por lo !eneral ho en da.
$a realidad, sin embar!o, es que el n"mero de accidentes ocasionados por los robots industriales
no es ni mucho menos alarmante, existiendo pocos datos al respecto, siendo pocos los pases que
cuentan con suficiente informacin al respecto.
%.'.3. /ausas de accidentes
4ara prevenir los posibles accidentes ocasionados por los robots, ha que comenzar detectando qu tipo
de accidentes se producen, para despus analizar el porqu se ori!inan determinar cmo pueden
evitarse.
En principio, dado lo similar de sus caractersticas, los ries!os de accidente en un entorno de tra5
ba6o con robots industriales deberan ser similares a los debidos al empleo de mquinas herramientas
con control numrico. (in embar!o, ha una serie de circunstancias que aumentan el nivel de ries!o
en el caso de los robots. Estas causas se refle6an de manera comparativa en la #abla %.7. Adems, el
hecho de que el robot traba6e en muchas ocasiones en ambientes de alto ries!o de accidente (for6as,
prensas, pintura, etc.) contribue a aumentar la probabilidad !ravedad del accidente.
$os tipos de accidentes causados por robots industriales, adems de los ocasionados por causas
tradicionales (electrocuciones al instalar o reparar el equipo, quemaduras, etc.), son debidos a8
272 Fundamentos de robtica
Colisin entre robots y hombre.
Aplastamiento al quedar atrapado el hombre entre el robot y algn elemento fijo.
Proyeccin de una pieza o material (metal fundido, corrosio! transportada por el robot.
"stos causas son agraadas por la gran elocidad con la que los robots pueden realizar sus moi#
mientos, adem$s de su eleada energ%a est$tica y din$mica.
"stablecidos los tipos principales de accidentes, es preciso localizar cu$les son las causas que los
originan. &os accidentes proocados por robots industriales se deben normalmente a'
(n mal funcionamiento del sistema de control (soft)are, hard)are, sistemas de potencia!.
Acceso indebido de personal a la zona de trabajo del robot.
"rrores humanos de los operarios en las etapas de mantenimiento, programacin, etc.
*otura de partes mec$nicas por corrosin o fatiga.
&iberacin de energ%a almacenada (el+ctrica, hidr$ulica, potencial, etc.!.
,obrecarga del robot (manejo de cargas e-cesias!.
.edio ambiente o herramienta peligrosa (l$ser, corte por chorro de agua, o-icorte, etc.!.
Tabla 9.4. Comparacin entre un robot industrial y otras mquinas de control numrico
*obot industrial .$quina conencional de control num+rico
.oimiento simult$neo de arios ejes (seis o m$s!. /ormalmente muee simult$neamente slo uno o dos
ejes.
.oimiento independiente de cada uno de los ejes. .oimientos limitados y con trayectorias simples.
0rayectorias complejas.
Campo de accin fuera del olumen cubierto por la Campo de accin dentro del olumen abarcado por la
propia m$quina. "spacio de trabajo no reconocido m$quina.
f$cilmente.
Campo de accin solapado con el de otras m$quinas y /ormalmente sin solapamiento del campo de accin.
dispositios.
9.3.2. Medidas de seguridad
(na ez istos los tipos de accidentes y las causas que los originan, es preciso determinar las medidas de
seguridada seguir que disminuyan el riesgo y la graedad.
"s importante considerar que segn estudios realizados por el Instituto de Investigaciones de Segu
ridad en el Trabajo de 0o1yo, el 234 de los accidentes en l%neas robotizadas ocurren durante las ope#
raciones de mantenimiento, ajuste, programacin, etc., mientras que slo el 534 ocurre durante el
funcionamiento normal de la l%nea.
Criterios de implantacin 273
Este dato es de gran relevancia y pone de manifiesto la gran importancia que tiene, para lograr un
nivel de seguridad adecuado, el impedir el acceso de operarios al campo de accin del robot mientras
ste est en funcionamiento.
La seguridad en sistemas robotizados presenta, por tanto, dos vertientes: aquella que se refiere a la
seguridad intrnseca al robot y que es responsabilidad del fabricante; y aquella que tiene que ver con
el diseo e implantacin del sistema y su posterior utilizacin, programacin y mantenimiento, res!
ponsabilidad del usuario.
En este sentido, se "a desarrollado la normativa europea E# $$%, adoptada en Espaa como norma
&#E'E# $$% de ttulo ()obot manipuladores. *eguridad(, que adems de proporcionar a diseadores
y fabricantes un marco de traba+o que les ayude a producir mquinas seguras en su utilizacin, pre!
senta una estrategia de traba+o para el desarollo y seleccin de medidas de seguridad. Esta estrategia
comprende las siguientes consideraciones:
, -eterminacin de los lmites del sistema: intencin de uso, espacio y tiempos de traba+o, etc.
, .dentificacin y descripcin de todos aquellos peligros que pueda generar la mquina durante
las fase de traba+o. *e deben incluir los riesgos derivados de un traba+o con+unto entre la
mquina y el operador y los riesgos derivados de un mal uso de la mquina.
, -efinicin del riesgo de que se produzca el accidente. *e definir probabilsticamente en fun!
cin del dao fsico que pueda producir.
, /omprobar que las medidas de seguridad son adecuadas.
La seleccin de las medidas de seguridad viene definida por las siguientes consideraciones.
0edidas de seguridad a tomar en la fase de diseo del robot
En el diseo del robot y de su sistema de control debe considerarse siempre el posible accidente,
tomndose las acciones oportunas para evitarlo en la medida de lo posible. 1s, el propio robot debe
contar con una serie de medidas internas encaminadas a evitar posibles accidentes:
, *upervisin del sistema de control: El sistema de control debe realizar una continua supervi!
sin del correcto funcionamiento de todos los subsistemas 2bucles de realimentacin, acciona!
mientos, etc.3 y de incluso l mismo (watch-dog).
, 4aradas de emergencia: -eben disponerse paradas de emergencia que desenergicen comple!
tamente al robot.
, 5elocidad m6ima limitada: El sistema de control asegurar que la velocidad m6ima de los
movimientos cuando una persona se encuentra en las pro6imidades del robot 2fase de progra!
macin por e+emplo3 sea inferior a la nominal 2como referencia debe ser inferior a 7,8 mis).
, -etectores de sobreesfuerzo: *e incluirn detectores de sobreesfuerzo en los accionamientos
que los desactiven cuando se sobrepase un valor e6cesivo 2caso de colisin o de atrapar a una
persona contra una parte fi+a3.
, 4ulsador de seguridad: Las paletas y consolas de programacin dispondrn de un dispositivo
de seguridad 2pulsador de "ombre muerto3 que impidan el movimiento accidental del robot.
, /digos de acceso: El acceso a la unidad de control y el arranque, parada y modificacin del
programa, estarn limitadas mediante el empleo de llaves, cdigos de seguridad, etc.
274 Fundamentos de robtica
Frenos mecnicos adicionales: Si el robot maneja grandes cargas, se debern de incluir frenos
mecnicos que entren en funcionamiento cuando se corte la alimentacin de los accionadores.
Asimismo, se dispondrn medios para desactivar estos frenos de forma manual.
Comprobacin de seales de autodiagnstico en la unidad de control previamente al primer
funcionamiento niveles de tensin de las fuentes de alimentacin, leds indicadores, mensajes
de error, etc.!.
"edidas de seguridad a tomar en la fase de diseo de la c#lula roboti$ada
%n el establecimientodel [ay-out de la c#lula se &a de considerar la utili$acin de barreras de acceso y
protecciones en general que intenten minimi$ar el riesgo de aparicin de un accidente. 'e forma general
se puedencitar las siguientes:
(arreras de acceso a la c#lula: Se dispondrn barreras en tomo a la c#lula, que impidan el ac)
ceso a personas parada inmediata al entrar en la $ona de trabajo! Figura *.*!.
'ispositivos de intercambio de pie$as: %n caso de que el operador deba poner+recoger pie$as
situadas dentro del rea de trabajo del robot, se utili$arn dispositivos que permitan reali$ar
estas acciones a distancia, utili$ando, por ejemplo, mesas giratorias Figura *.,-!.
Figura *.*. Clula robotizada de paletizado con vallas de proteccin para impedir el acceso.
(Cortesa de INSER Robtica.)
Criterios de implantacin 275
'j
Movimientos condicionados: En el caso de que durante el funcionamiento de la clula el ope
rario deba entrar en determinados momentos dentro del campo de accin del robot (para ali
mentar de nuevas piezas al robot por ejemplo), se programar a ste de manera que no efect!e
movimiento alguno durante estos instantes"
#onas de reparacin: $e prever la e%istencia de zonas de reparacin y mantenimiento" Estas
zonas, dentro del campo de accin del robot, estarn fuera de su zona de trabajo" En ellas se
asegurar mediante diferentes dispositivos que el robot no realizar movimientos de manera
automtica"
&ondiciones adecuadas en la instalacin au%iliar: $istema elctrico con protecciones, aisla
mientos, etc", sistemas neumticos o 'idrulicos correctos"
(igura )"*+" Operador utilizando una mesa giratoria para la alimentacin de piezas en una
clula robotizada de soldadura. (Cortesa de KUKA.)
Medidas de seguridad a tomar en la fase de instalacin y e%plotacin del sistema
,or otra parte, durante la utilizacin del sistema - en especial durante las fases de instalacin - puesta en
marc'a, deben respetarse rigurosamente determinadas normas que reducirn el riesgo de accidente"
.dems, es importante que e%ista informacin en la propia planta de la posibilidad de esos riesgos, as/
como que los operarios tengan la formacin adecuada" Estas consideracionesse pueden resumir de forma
breve en los siguientes puntos"
.bstenerse de entrar en la zona de trabajo: 0urante la programacin e implantacin de la
aplicacin, se procurar permanecer, dentro de lo posible, fuera del campo de accin del robot"
1ste trabajar a velocidades lentas" En cualquier caso, se deber salir fuera del rea de trabajo
276 Fundamentos de robtica
cuando el robot vaya a trabajar de manera automtica, aun siendo en fase de pruebas. Es tam
bin aconsejable que, siempre que sea posible, la fase de programacin se realice con dos ope
rarios, observando uno de ellos la marcha del proceso, estando dispuesto a accionar el paro de
emergencia en caso de necesidad.
Sealizacin adecuada: La clula estar dotada de una adecuada sealiacin del estado del
robot o l!nea robotiada mediante seales luminosas y ac"sticas. #s!, ser aconsejable que antes
de comenar el ciclo de trabajo tras una parada se avise mediante una sirena e indicacin lumi
nosa. $el mismo modo, seales luminosas llamarn la atencin sobre el hecho de que el robot
est funcionando y su riesgo potencial de accidente.
Prueba progresiva del programa del robot: El desarrollo y ejecucin del programa del robot,
y de toda la clula en s!, deber hacerse con sumo cuidado. El programa deber ejecutarse pri
meramente a velocidad lenta y paso a paso. # continuacin se podr ejecutar de manera conti
nua, pudindose aumentar progresivamente la velocidad.
Formacin adecuada del personal que manejar la planta.
9.3.3. Normativa legal
En cuanto a la normativa legal relativa a la instalacin y empleo de robots, sta ha sido hasta principios
de los aos noventa escasa. Los motivos que han llevado al retraso a la hora de proponer una
normaliacinson varios, y en general podr!an citarse%
& La tendencia e'istente a enfrentarse con los problemas tcnicos y de mercado (ventas) antes
que con ning"n otro.
& La necesidad de suficiente e'periencia en la materia de accidentes ocasionados por robots como
para establecer una casu!stica suficientemente vlida.
& La dificultad en unificar criterios y niveles de seguridad entre los diferentes usuarios y pa!ses.
& La dificultad y tiempo necesario para preparar la documentacin referente a la normativa, as!
como a los procedimientos de evaluacin.
En la actualidad, la normativa ms relevante e'istente al respecto a nivel mundial es la siguiente%
Normativa internacional ISO !"# :99"
*e trata de una normativa realiada por el organismo internacional de estandariacin +,*-./01.Es
relativamentereciente, pues data del ao 2//0. # grandes rasgos contiene la siguiente informacin% una
seccin sobreel anlisis de la seguridad, la definicin de riesgos y la identificacin de posibles fuentes
de peligros o accidentes. 3ontiene adems una seccin sobre diseo y fabricacin, que dedica un breve
anlisis al diseo de sistemas robotiados, teniendo en cuenta aspectos mecnicos, ergonmicos y de
control.
La mayor!a de las indicaciones que se proporcionan son de carcter general. 4ay que mencionar
que dado el corto espacio de tiempo que lleva vigente, no se conocen datos fiables sobre los resulta
dos derivados de su utiliacin.
Criterios de implantacin 277
Normativa americana ANSIIRIA R15.06-1992
Se trata de una normativa realizada por el Instituto Nacional de Normalizacin de Estados Unidos
(ANSI) [ANSI-92. !am"i#n data del a$o 1992% &iendo una revi&i'n de una normativa pu"licada en 19(6.
)& relativamente "reve% pero pre&enta al*una& caracter+&tica& ,ue merecen de&tacar&e. -or e.emplo%
la inclu&i'n% en el apartado &o"re la de/inici'n de rie&*o&% de al*uno& ep+*ra/e& ,ue ver&an &o"re la
pro"a"ilidad de la aparici'n de un accidente 0 la &everidad del po&i"le da$o /+&ico a una per&ona% de1
pendiente& del nivel de e2periencia del operador 0 la /recuencia en la ,ue #&te &e encuentra en zona de
peli*ro.
Normativa europea )N 335 y e&pa$ola 4N)-)N 335
)l Comit Europeo de Normalizacin (5)N) apro"' en 1992 la normativa )N 77S, adaptaci'n de la
norma internacional IS6 1021( 71992. A &u vez la Asociacin Espaola de Normalizacin (A)N6R)
adopt' en marzo de 1996e&ta normativa (traducida al e&pa$ol) denomin8ndo&e4N)-)N77S 0 ,ue lleva
por t+tulo 7 9Ro"ot& manipuladore& indu&triale&. Se*uridad9 [4N)-96.
-or lo tanto% la normativa e&pa$ola (coincidente con la europea) &e :a de&arrollado &o"re la nor1
mativa internacional IS6 1021( 71992% incorporando y adaptando a&pecto& relacionado& en la norma
europea 9)N 2927 1991 Sa/et0 o/ ;ac:iner0 - <a&ic concept&% *eneral principIe& /or de&i*n9 [)N-9I.
)&ta normativa 4N)-)N 77S inclu0e una &erie de re,ui&ito& para me.orar la &e*uridad en la& /a&e&
de di&e$o% utilizaci'n% reparaci'n 0 mantenimiento de lo& ro"ot& indu&triale& y de la& c#lula& ro"otiza1
da&. )n t#rmino& *enerale& e&ta& recomendacione& &on &imilare& a la& de&crita& en el ep+*ra/e 9.=.2%
enumer8ndo&e la& po&i"le& /uente& de peli*ro y e&ta"leci#ndo&e una &erie de re,ui&ito& en la& /a&e& de
di&e$o 0 con&trucci'n del ro"ot% di&e$o 0 protecci'n de la c#lula ro"otizada 0 utilizaci'n% in&talaci'n 0
pue&ta en marc:a de la mi&ma.
9.4. >4S!I?I5A5I@N )56N@;I5A
)& norma :a"itual ante& de llevar a ca"o cual,uier pro0ecto de in*enier+a% el realizar un an8li&i&
econ'mico del mi&moA an8li&i& ,ue determinar8 de /orma apro2imada &u via"ilidad 0 renta"ilidad.
5uando adem8& el pro0ecto con&i&te en &u ma0or parte en la inclu&i'n de material tecnol'*icamente
avanzadoo en la automatizaci'nde un proce&o 0a conocido% e&te an8li&i& &e convierte en impre&cindi"le.
)&te e& el ca&o de un pro0ecto de in*enier+a en el ,ue &e utiliza como e,uipo principal un ro"ot
indu&trial.
Bo& "ene/icio& &ociale& o lo avanzado de la tecnolo*+a a utilizar% aun,ue &e con&ideren cue&tione&
importante&% &on normalmente a&pecto& &ecundario&% pue& el primer o".etivo de cual,uier empre&a ,ue
acometeun pro0ecto de e&ta& caracter+&tica& e& o"tener de #l un rendimientoecon'mico% 0a &ea a corto o
a lar*o plazo.
)n e&te ep+*ra/e &e va a con&iderar la metodolo*+a a aplicar para la realizaci'n de e&te an8li&i&. )&ta
metodolo*+a&e "a&a en el an8li&i& de lo& /actore& ,ue la aplicaci'nde un ro"ot trae con&i*o.
278 Fundamentos de robtica
9.4.1. Factores econmicos y datos bsicos necesarios
Para poder realizar el anlisis econmico de un proyecto con robot es necesario tener en cuenta un
conjunto de factores econmicos particulares, adems de contar con una informacin previa sobre
algunos datos bsicos del proyecto. Como factor econmico principal se considera el tipo de instalacin
a desarrollar, y como datos bsicos se pueden citar los siguientes coste de inversin, costes de
instalacin y a!orros o beneficios resultantes del proyecto. "odo ello teniendo en cuenta al robot de
manera directa.
"ipo de instalacin
# la !ora de realizar un proyecto con robot e$isten dos posibles situaciones. Primero, %ue la aplicacin
%ue se %uiere realizar sea de marcado carcter novedoso. &n este caso, la inclusin de un robot es slo
una posibilidad entre diversas alternativas. 'e debern considerar todas y seleccionar la %ue resulte ms
beneficiosa seg(n los criterios de inversin de la compa)*a. &n este tipo de proyectos e$iste una
dificultad a)adida, pues al tratarse de una nueva aplicacin muc!os datos sobre el proceso no son
conocidos de manera fiable, pudi+ndose llegar a deducir conclusiones e%u*vocas. Puede llegar a ser
ciertamente compleja la evaluacin econmica y t+cnica en este tipo de proyectos si no se posee un
conocimientoadecuado sobre la implantacin de c+lulas robotizadas.
&l segundo caso, de aplicacin ms frecuente, consiste en la automatizacin de un m+todo de
operacin %ue se realiza en buena medida de forma manual, con la inclusin de un robot. &n esta
situacin el anlisis resulta ms sencillo, pues los parmetros y tiempos de operacin manual o
robotizada son fcilmente comparables. 'e podr asimismo realizar una comparacin de costes y
beneficios, encontrndose todos los factores de produccin perfectamentedelimitados.
Con independencia de cul sea la situacin en la %ue se encuentre es necesario, para realizar el
anlisis, utilizar lo %ue se denomina el anlisis econmico.
,atos bsicos de coste
#l igual %ue en cual%uier proyecto de ingenier*a, los datos bsicos de coste a tener en cuenta se dividen
en dos categor*as costes de inversin y costes de e$plotacin. 'e estudian a continuacin dic!os costes,
orientadossiempre !acia el caso particular de una c+lula robotizada.
Costes de inversin -os costes de inversin son a%uellos costes necesarios para realizar la im.
plantacin f*sica del sistema. Como principales costes de inversin se incluyen los siguientes.
Coste de adquisicin del robot: &ste coste incluye el robot e%uipado con a%uellas caracter*sti.
cas %ue se consideren oportunas. /o se incluir a%u* la !erramienta a colocar en el e$tremo del
robot. &l coste del robot es muy variable, y depende principalmente de las prestaciones %ue sea
capaz de suministrar. Por regla general, robots ms caros podrn adaptarse a un mayor n(mero
de tareas diferentes, mientras %ue robots de un precio inferior se adaptarn peor y se tendrn
%ue desarrollar !erramientas especiales para ellos.
Coste de herramientas y equipos especiales: 'e incluyen en este apartado tanto la !erramienta o
efector final a utilizar por el robot, como todos a%uellos e%uipos especiales %ue se !ayan de
Criterios de implantacin 279
utilizar debido a la inclusin del robot. Este coste va ntimamente ligado al coste de compra del
robot.
Coste de ingeniera e instalacin: Aqu se deben incluir en principio aquellos costes derivados
del estudio de planificacin y diseo, as como costes de desarrollo para la utilizacin del robot.
Posteriormente se han de aadir aquellos costes especficos de la instalacin del sistema. Habr
que tener en cuenta de forma especial aquellos costes generados de forma directa por la inclu!
sin del robot, para poder as comparar, cuando sea necesario, con los costes de ndole similar
utilizando soluciones alternativas al robot.
"ostes y beneficios de e#plotacin$ %on aquellos costes derivados de la utilizacin directa de la
c&lula. 'ambi&n se ha de tener en cuenta el ahorro o beneficios que la utilizacin del robot, o la auto!
matizacin de forma general, comporte. Entre los costes de e#plotacin y ahorro se pueden mencionar
los siguientes$
Mano de obra: "omo costes se debern incluir tanto la mano de obra directa de operacin de la
planta, como la mano de obra que de forma indirecta interviene en la e#plotacin, como puede
ser en la supervisin, planificacin, etc. %e debe computar como un ahorro la mano de obra
sustituida por la automatizacin, siempre teniendo en cuenta los costes sociales que pudieran
generarse.
Mantenimiento: %e incluyen aqu los costes derivados del mantenimiento de los equipos de la
planta, e#ceptuando la mano de obra considerada en el factor anterior. Entre los equipos es ne!
cesario destacar el mantenimiento del robot. Estos datos sobre reparaciones, repuestos, etc., han
de suponerse en su mayor parte. Habr que ser consecuente y tener en cuenta las demandas o
requerimientos que el traba(o y su entorno e#i(an al robot y a los dems equipos.
Aumento de calidad e incremento de productividad: %e trata de beneficios importantes a tener
en cuenta como consecuencia directa de la utilizacin de un robot. El aumento de calidad se
debe principalmente a que el robot realiza su tarea de manera uniforme y consistente, sin la
aparicin de altiba(os propios del estado de nimo de un operario. El robot puede, en la mayora
de los casos, traba(ar tan rpido como un operario, pero adems puede seguir realizndolo du!
rante varios tumos sin problema alguno.
Entrenamiento: Al tratarse de una tecnologa relativamente moderna, ser necesario formar
previamente a la mano de obra y al personal que de alguna manera intervenga en la c&lula. Este
entrenamiento ha de ser continuo y por ello se incluye como gasto de e#plotacin y no como
gasto de inversin.
9.4.2. El robot como elemento principal del anlisis econmico
El robot desde el punto de vista econmico presenta unas caractersticas completamente distintas a los
dems equipos de una planta, y como tal merece ser tratado de forma independiente.
)a se han mencionado en el epgrafe anterior algunas de esas caractersticas, como puede ser su
coste, mantenimientoo el aumento de calidad y productividad que su presencia aporta. %in embargo, no
se ha tenido en cuenta uno de los factores que definen de por s a un robot industrial$ la versatilidad o
fle#ibilidadde su uso.
280 Fundamentos de robtica
Normalmente, en una aplicacin industrial se considera que la vida de los equipos de fabricacin se
corresponde con la del producto que se est fabricando. Es decir, cuando se ha de cambiar de producto,
ya sea por cuestiones de mercado o necesidades tcnicas, las mquinas empleadas se quedan obsoletas o
su reciclaje para el nuevo proceso resulta muy costoso. Su rendimiento posterior al ciclo de vida del
producto es prcticamente nulo.
Un robot, en cambio, es una herramienta programable y fleible y por tanto susceptible de adaptarse,
casi sin coste alguno para ser utili!ado en diversas aplicaciones. Esta caracteristica es sumamente
interesante, pues implica que el robot, como equipo de fabricacin, no est sujeto al ciclo de vida del
producto, sino que posee un ciclo de vida propio y por tanto su rentabilidad puede ser mayor. Eisten,
sin embargo, dos matices que se deben mencionar.
"rimero, aunque el robot sea reprogramable nunca se asegura que tras concluir el ciclo del producto
al que contribu#a a fabricar, el robot pueda incluirse de forma eficiente en un nuevo proceso de
fabricacin. Eistirn muchas ms posibilidades que con cualquier otra herramienta, pero no la
seguridad total. Segundo, se tiende a utili!ar el robot, precisamente por su fleibilidad, en procesos de
fabricacin con ciclos de vida cortos. $o que eplica que para la primera aplicacin sea complicado
justificar su inversin.
Esto lleva a tener que considerar un valor de recuperacin o retomo del coste del robot al finali!ar
cada uno de los proyectos en los que se aplica. $gicamente, este valor de retomo deber ir
disminuyendocon cada proyecto, ya sea por su deterioro o por su obsolescencia. Este valor de retomo es
muy importante y se concretar en el siguiente ep#grafe cuando se hable de los mtodos de anlisis
econmico.
%tro factor a tener en cuenta, ya mencionado en el ep#grafe anterior, es el aumento de productividad
que el robot aporta. &umento que es consecuencia directa de la reali!acin del trabajo de forma ms
rpida y con menores interrupciones 'trabajo en varios tumos seguidos(. Este factor se ver con ms
detalle en el siguiente ep#grafe.
9.4.3. Mtodos de anlisis econmico
Eisten diversos mtodos aplicables para reali!ar el anlisis econmico de una inversin y poder decidir
si sta va a resultar rentable o no. Se trata de mtodos de aplicacin general a cualquier tipo de inversin
o proyecto )*%+,-N./01 )23%%4E3.5/1, aunque aqu# se particulari!arn para proyectos que incluyan la
utili!acinde robots. $os tres mtodos a estudiar son6
7 "er#odo de 3ecuperacin.
7 *todo del 4alor &ctual Neto '4&N(.
7 *todo de la 8asa 9nterna de la 3enta '893(.
+ada uno de los tres mtodos es de aplicacin independiente y sirven para reali!ar anlisis similares.
8ericamente, de la aplicacin de los tres a un caso concreto se deberian etraer las mismas
conclusiones. Es preciso considerar que al basar gran parte de los ra!onamientos en datos supuestos, los
resultados, en ocasiones pueden ser de valide! limitada.
Criterios de implantacin 281
En este epgrafe se presenta una breve descripcin de cada uno, sin querer llegar a profundizar
demasiado en ellos. Adems, cada empresa suele desarrollar sus propios procedimientos, donde realiza
una evaluacinparticular del proyecto y valora los resultados segn sus propios criterios.
Perodo de recuperacin
Se entiende como periodo de recuperacin a aquel intervalo de tiempo que transcurre desde el comienzo
del proyectohasta que el fluo de caa (cash-flow) neto o acumulado sea mayor que cero. Es decir, indica
cundo se empieza a tener ingresos positivos sumando todas las entradas y salidas de capital desde el
comienzo del proyecto. !omo es lgico, se busca un periodo de recuperacinlo ms corto posible, pues
transcurrido este tiempo es cuando realmente la inversin comienza a ser rentable. "eriodos de
recuperacin cercanos al ciclo de vida del proyecto o mayores suponen un descarte automtico de la
inversin, pues en un caso los riesgos no merecen la pena, y en el otro nunca se recuperar lo invertido.
El periodo de recuperacin se mide normalmente en a#os, y viene dado por el valor de n que cumple
la ecuacin$
[9. 1]
en la que %, y !jrepresentan los ingresos y costes estimados durante el transcursodel a#o. &gicamente
los costes de inversin vendrn incluidos en el valor de !a siendo %a' (."ara simplificar se supone un
cash-flow constante durante la vida del proyecto y despear n de la ecuacin$
) el * n+% ) e, ' o -../0
en la que !1 representa el coste de la inversin inicial y +%)!, el cash)flo2 anual. 3espeando n
resultar$
el
n=---
R-e
-.. 40
&a realizacin de un proyecto con robot no cambia significativamentela aplicacin de este m5todo.
6nicamenteconsiderar el aumento de productividad y por tanto de ingresos que su utilizacin acarreara.
Se muestra a continuacinun eemplo.
Ejemplo 9.1.
Supngase un proyecto que cumpla los datos mostrados en la 7abla ..8. &a influencia de utilizar
un robot se notar en los ingresos que se esperan recibir cada a#o, funcin directa de la productivi9
dad. "ara hallar el perodo de recuperacin bastar aplicar la ecuacin -..:0, y es sencillo obtener
que el perodo de recuperacin n ha de tener un valor de /.; a#os para cumplirla.
) /<<* +;<) 4<, * +:/<) 8<, * <.;+:8<) ;<, ' (
282 Fundamentos de robtica
Mtodo del Valor Actual Neto (VAN)
El mtodo anterior, aunque til por su simplicidad, presenta el inconveniente de que no se considera el
valor temporal del dinero. En el mtodo del VAN este concepto s se tiene en cuenta. Se considera que
los elementos de coste de la inversin incluyen adems del precio del material a adquirir, el tipo de
inters a abonar por financiacin eterna. Se consideran adems los beneficios como rendimientos
futuros netos que se espera que obtener de la inversin inicial.
Se considera entonces cmo VAN de la inversin al valor presente del cash-flow futuro, utili!ando
como tasa de descuento del coste el tipo de inters. Es decir, el VAN podr epresarse mediante la
si"uienteformula#
$%.&'
donde n es el perodo de vida del proyecto, Rj y q los in"resos y "astos estimados durante el a(oj, e i es
el tipo de inters o rentabilidad. )"icamente, un valor de VAN positivo indica una inversin rentable, y
cuanto mayor sea aqul mayor ser la rentabilidad. *or el contrario, un valor del VAN ne"ativo supondr
una inversin no rentable.
+omo valor de i se ele"ir aquel que la empresa considere como aceptable para asumir el ries"o. En
este mtodo si es posible considerar el valor del retomo del robot. Si se supone que al final del proyecto
el valor de retomo del robot puede considerarse como ,- , el yAN quedara#
$%..'
Se /ace notar que el valor de retomo del robot se considera al final del ltimo a(o del proyecto. Se
aplica a continuacinsobre un e0emplo.
Tabla 9.5. Datos econmicos de un proyecto (en millones de pesetas)
*erodo de vida .a(os
A(os 1 2 3 4 4 .
+oste de inversin 355
+ostes de eplotacin 45 .5 65 65 65
7n"resos 65 235 2.5 2.5 2.5
Criterios de implantacin 283
Se consideran los datos de un proyecto dados por la Tabla 9.5. Suponiendo que el valor de depre
ciacin del robot es lineal con respecto al paso del tiempo y conociendo la vida til del robot y su
coste inicial, es inmediato calcular el valor de retomo del mismo tras el quinto ao. Suponiendo
este valor de 5 millones, y que la rentabilidad que se quiere obtener es del 0.2, el V! vendr" da
do por la si#uiente ecuacin$
%&emplo 9.2.
'0( )0 *20( 50 *50( '0 *50( '0 *50( '0 5
V!+ (200, , , , , ,((((($(
-*,0.2. -*,0.2.2 -*,0.2.) -*,0.2./ -*,0.2.5 -*,0.2.0
y operando se obtiene un valor del V! de (5.05, lo que indica que el proyecto no es rentable, es
decir, que no lle#a a proporcionar el 0.2 de rentabilidad propuesto.
12todo de la Tasa 3nterna de la 4enta -T34.
%ste m2todo es muy similar al del V!, aunque su en5oque es li#eramentedistinto. 6o que se trata de
7allar es la tasa de rendimiento que se va a obtener del proyecto y por tanto de la inversin. Si en el
m2todo del V! se supon8a una tasa de rendimiento aceptable, con el T34 se trata de ver cu"l es esa tasa
de rendimiento m"9ima posible. :ara ello se utili;a la 5rmula del V!, pero considerando que 2ste es
nulo y que la tasa de rentabilidad i es desconocida. <e esta ecuacin se obtendr" i, y en base a ella se
decidir" si merece la pena el ries#o que supone la inversin. %n todo lo dem"s es similar al m2todo del
V!.
%&emplo 9.).
Se consideran los mismo datos de partida que en el %&emplo 9.2. Sin embar#o, se desconoce
a7ora el valor de la rentabilidad, que es precisamente lo que se quiere obtener. plicando la ecua
cin =9.5> y considerando el valor del V! i#ual a cero, se tiene$
'0( )0 *20( 50 *50( '0 *50( '0 *50( '0 5
0+(200, , , , , ,((($(
-3 r) -l,i.2 -*,i.) -*,i./ -l,i.5 -l,i.0
<espe&ando i se obtiene el valor del T34, que en este caso es de 0.*'?.
6000
. : : : : ;
HDTotal
r--
DExcepto Automvil
A
te.
'---
1-
.a
- - r-- 1-
..q
.c . "".
- - - 1-
A
...V
. l~
,~
'e,
r--
'---
1,
1 1 11
",'
. . l1 li
,.
284 Fundamentos de robtica
5000
4000
3000
2000
1000
o
89 90 91 92 93 94 95
Figura 9.11. Evo lucin del parque de ro bo ! en E!pa"a #a!a el a"o 1 99$ %&uene: AE'(.
Singapu
!ep. "#eca
!eino $ni%o
&ancia
'enelux
Alemania
$SS!
$SA
. .
( ) *
)***
*+*
1111
,-l*'
+ + '
,p
~
l*i
. .
*ii'
. .
*il'
...
~
( ) +
Suecia
,oea
+ talia
E-pa.a
o 10000 20000 30000 40000 50000 60000 70000
Figura 9.12. .arque /undial %e0cepo 1apn( de ro bo ! a co /ien2o ! del a"o 1 993 %&uene: AE'(.
Criterios de implantacin 285
9.5. MERCADO DE ROBOTS
Por muchas de las consideraciones realizadas a lo largo de este captulo, la instalacin y posterior
explotacin de un robot industrial se adapta mejor a un tipo de industria que a otro. Esto es debido
principalmente a que determinadas aplicaciones propias de estas industrias permiten la utilizacin de
robots de forma muy rentable. Tradicionalmente, cuando se presentan estadsticas sobre implantacin de
robots en una determinada zona, se suele distinguir entre la distribucin de robots por sectores y por
aplicaciones. La propia Federacin Internacional de Robtica !"#$ propone una serie de indicaciones
sobre cmo realizar esta clasificacin.
La realizacin de este tipo de estadsticas no siempre es sencilla, pues suelen aparecer
contradicciones entre los datos proporcionados por suministradores y usuarios, cada uno atendiendo a
sus propios intereses. %dem&s, en numerosas ocasiones, la asignacin de un robot a un sector o
Tabla 9.6. 'ensidadde robotse ndicede parode (ariospases en 1996
)"uente* %E#l
Pases 'ensidad de robots +ndice de paro ,-mero de robots
.apn /01 23 452.067
8uecia 91 :3 0.:55
%lemania 07 :3 09.560
!talia 00 5/ 3 /0.1:9
Estados ;nidos 20 63 90.5:7
"rancia 22 5/3 54.269
Espa<a // //3 0.249
'ensidad de robots =n= de robots cada 51.111 trabajadores de la industria
!nd. no
manufacturera >tros
4% 5%
!nd.
manufacturera
31%
motor
60%
Figura 9.13. 'istribucinde robotsen Espa<a porsectores a comienzosdel a<o 1996 "uente*%E#$.
286 Fundamentos de robtica
Mecanizacin
7%
Otros
6%
Manipulacin
18%
Soldadura
55%
Figura 9.14. Distribucin de robots por aplicaciones en Espaa a comienzos del ao 1996 (Fuente: AER)
aplicacinno est lo suficientemente clara. Aun as, estos datos son extremadamentetiles para conocer
tendencias! la situacin aproximada del mercado.
"os datos estadsticos so#re el mercado de ro#ots son actualizados anualmente por la $%& !
pu#licados en cada pas socio. 'n 'spa(a, la Asociacin Espaola de Robtica )A'&*,como or+anismo
miem#ro de la $%&, pu#lica anualmente estos datos. "as estadsticas presentadas en este ep+rafe ,an
sido extrados del informe anual correspondiente al a(o 1--6 ! .ue inclu!e datos a fec,a de enero de
1--6/A'&0-61.
'spa(a, aun.ue no se trate de un pas con un +ran ndice de ro#otizacin, s presenta la particularidad
de al#er+ar numerosas industrias de automocin, lo .ue, como ms adelante se 2er, condiciona de
forma importante las caractersticas de su par.ue de ro#ots. 3ormalmente, el ndice de ro#otizacin de
un pas se define en funcin del nmero de ro#ots en funcionamientopor cada 14.444tra#a5adores en la
industria.
'n la %i+ura -.11 se muestra la e2olucin se+uida por el par.ue de ro#ots en 'spa(a durante los
ltimos a(os. Se aprecia un crecimiento constante ! sostenido, .ue se espera se manten+a durante al+n
tiempo, pues la ro#tica es an una tecnolo+a 5o2en, suscepti#le de a#rirse camino en aplicaciones !
sectores nue2os, como puede ser el de la construccin. 'n total el nmero de ro#ots funcionando en
nuestro pas durante el a(o 1--6alcanz los 6.786.
Al a(o, se estn 2endiendoen todo el mundo unas 76.644 unidades de ro#ots industriales. Alemania !
Suecia destacan, a excepcin de 9apn, como los pases con ms nmero de ro#ots implantados por cada
14.444tra#a5adores de la industria :densidad de ro#ots*, aun.ue en cuanto al nmero a#soluto de ro#ots
en sus f#ricas se encuentren por de#a5o de 'stados ;nidos o 9apn :%i+ura -.1<*. 'ste ltimo :no
incluido en la fi+ura* tiene la particularidad de incluir en su par.ue de ro#ots toda una +ama de
manipuladores de propsito especfico .ue no son considerados como tal en el resto de los pases ! .ue
lle+an a la desor#itante cifra de 817.678 para el a(o 1--6. "a =a#la -.6 muestra los datos
correspondientes a la densidad de ro#ots en al+unos pases industrializados, ! su comparacin con el
ndice aproximadode paro en los mismos.
"a =a#la -.8, 5unto con la %i+ura -.17, muestra la distri#ucin de ro#ots por sectores en 'spa(a a
principios del a(o 1--6. >estaca de forma aprecia#le la cuota de mercado .ue el sector dedicado a
2e,culosa motor, es decir, la industria del autom2il, posee en 'spa(a.
Criterios de implantacin
I
287
: j
: 1 1
h
, ; . )
Tabla 9.7. Distribucinde robots en Espaa por aplicaciones (1 996)
~Fuente: AERl
Aplicacin Hasta Alt. 95 a!.95 "otal
1 99#
Aplicacin ad$esi%os 1 5& &' ( 1 ')
Apliacacin *ateriales ') ( ( ')
+ar,a y descar,a de *-.uinas &'& /& ( /1 #
+orte *ec-nico0 desbarbado #) 1 ( #1
+orte por l-ser l 1 ( &
+orte por c$orro de a,ua 5) 9 ( 59
Des*oldeo en pl-stico 1 15 1 1 # ( &'9
Ensean2a0 in%esti,acin 1 )' 1 9 ( 1 &1
3nsercin y *onta!e &# ( ( &#
4anipulacin de *ateriales /19 11 ( #5)
4anipulacin en 5undicin 1 / &' ( #1
4anipulacin para paleti2acin 99 &/ ( 1 &&
4edicin e inspeccin &6 ( ( &6
4onta!e *ec-nico 1 '/ ( ( 1 '/
6intura 1 &' &9 ( 1 51
7oldadura al arco 1 ))# 1 56 ( 1 1 6)
7oldadura por puntos 1 #') &## ( 1 1&#
7oldadura0 otros 6/ ( ( 6/
8arios &&9 69 ( &9'
"otal #51 6 '/) ( 5/#6
Tabla 9.8. Distribucinde robots en Espaa por sectores (1 996)
9Fuente: AERl
7ector Hasta Alt. 95 a!.95 "otal
1 995
Ali*entacin : bebidas 1 ' 6 ( &#
+er-*ica 6& 5 ( 61
Educacin '& 9 ( 91
E.uipos el;ctricos 1 6& 1 # ( 1 16
3ndustrias *anu5actureras #1 1 ( #'
3n%esti,acion : desarrollo '1 9 ( 9)
4adera : *uebles & 1 ( /
6apel0 i*presin : edicin ( ( l
<u=*ica0 pl-sticos &&1 1 1 5 ( /#&
"e>til 1 & ( ( 1 &
"rans5or*ados *et-licos 9)# 1 1 & ( 1 )1 6
8e$=culos a *otor &6#1 #'/ ( /1 &#
8arios &11 15 ( /5&
"otal #51 6 '/) ( 5/#6
288 Fundamentos de robtica
Tabla 9.9. Distribucin de robots en Espaa por marcas (1996)
Fuente: AERl
Marca Hasta Ll95 Total %
1994
ABB 1672 468 2140 40.0
Adept 49 3 52 1.0
Comau 59 26 85 1.6
Danoat 64 5 69 1.3
D!A 38 " 38 0.7
#A$%C 485 58 543 10.1
H&tac'& 46 " 46 0.8
(%(A 181 53 234 4.3
)enault ACMA 197 " 197 3.7
*epro 104 50 154 2.9
*ta+l& %n&mat&on 272 12 284 5.3
,ol-s.a/en 331 " 331 6.2
0ama'a 116 12 128 2.4
0as-a.a 220 20 240 4.5
" tros 683 102 785 15.2
Total 4516 830 5346 100
1a Tala 9.72 3unto con la #&/ura 9.142 muestra la d&str&uc&4n de roots por apl&cac&4n en !spa5a a
pr&nc&p&os del a5o 1996. !n consonanc&a con la tala anter&or2 a6uellas apl&cac&ones prop&as de la
&ndustr&a de automoc&4n2 como son la soldadura al arco o por puntos2 son las 6ue m7s roots emplean. !n
el pr48&mo cap9tulo se e8pl&can con detalle todas las apl&cac&ones menc&onadas en la tala : 6ue
const&tu:en2con m7s o menos &mplantac&4n2 las apl&cac&ones m7s &doneas para la ut&l&;ac&4n de roots.
<or =lt&mo2 en la Tala 9.9 se muestra la d&str&uc&4n de roots por marcas en !spa5a a com&en;os
del a5o 1996. >n&camente se menc&onan a6uellas con ma:or 9nd&ce de &mplantac&4n2 pues la l&sta /loal
lle/a a &nclu&r m7s de 60 marcas d&?erentes2 muc'as de ellas s&n lle/ar a tener m7s de med&a docena de
roots &mplantadostotales.
9.6. BIBLIOGRAFA
@A!)A96B Asoc&ac&4n !spa5ola de )o4t&ca2 Estudio estadsticas de robotica 19962 Barcelona2 1996.
@AC%A0" A90B A/ua:o2 #.2 " rte/a2 M. y Dur7n2 M2 D!stud&o de *e/ur&dad en *&stemas )oot&;adosD2
Revista de Robtica y Automatizacin Integrada, 472 pp 40A482 1990.
Criterios de implantacin 289
[ANSI-92] American National Standar ANSIIRIA RI5.06-1992: Industrial Robots and Robot Systems
- Safety, 1992.
[CACI-95] CACI Products Coman!" Simulation with SIM!C"#R$ l%.&, 199&.
[#N-91] #N 292-1" Safety of Machinery - 'asic Concepts, (eneral principles for desi(n, 1991.
[#N$#%&#R$#R-'0] #n(el)er(er" *.+." ,-undamental s and .ana(ament," en Robotics in )ractice.
/-101. +o(an Pa(e" %ondres" 19'0.
[-A&RI1I-'2] -a)ri3i" 4" ,%a Se(uridad en el #mleo del Ro)ot" Princiios ! Normas Italianas e In
ternacionales," Re*ista de Robtica, 20" 01-06" 19'2.
[$ASC5I$N#-9/] $ascoi(ne" A.#." ,Ro)ot Sa6et!: A S!stems Sa6et! Aroac7 in 58er8ie9," )roce+
edin(s of an International Conference of the !ustralian Robot !ssociation and the Intemational
ederation of Robotics, &ris)ane" :ueensland" Australia" 199/.
[$R55;#R-'9] $roo8er" ..P. et al." Robtica Industrial, "ecnolo(ia, )ro(ramacin y !plicaciones,
/0/-59/. .c$ra9-<ill" .adrid" 19'9.
[IS5-92] International Standard IS5 1021':1992=#> Manipulatin( Industrial Robot - Safety, 1992.
[.5C<5N-90] -. .oc7?n" ,conom-a. "eor-a y pol-tica, .c$ra9-<ill" 1990.
[R54RI$@#1-9/] RodrA(ue3" -.*." )lanificacin autom.tica de trayectorias libres de colisin para
robots en entornos /0, Besis 4octoral" 4ISA." @ni8ersidad PolitCcnica de .adrid" 199/.
[@N#-96] @N#-#N 225" Robots manipuladores industriales. Se(uridad, A#N5R" .ar3o 1996.
[DARN#C+#-'2] DarnecEe" <.*. ! Sc7ra6t"R.4." ,Alication Plannin(," en: Industrial Robots,
!pplication ,1perience, 120-252.I-S =Pu)lications> %td." @.+." 19'2.
Captulo 10
APLICACIONES DE LOS ROBOTS
Si no se pisa el barro, no se hace el jarro.
Refranero popular
En la actualidad los robots se usan de manera extensa en la industria, siendoun elemento indispensable
en una gran parte de los procesos de manufactura. Impulsados principalmente por el sector del
automvil, los robots han dejado de ser mquinas misteriosas propias de la ciencia ficcin para ser un
elementoms de muchos de los talleres y lneas de produccin.
or su propia definicin el robot industrial es multifuncional, esto es, puede ser aplicado a un
n!mero, en principio ilimitado, de funciones. "o obstante, la prctica ha demostradoque su adaptacin
es ptima en determinados procesos #soldadura, paleti$acin, etc.% en los que hoy en da el robot es, sin
duda alguna, la solucinms rentable &E"'E()E*'E*+,-., &'*//0E*+,1. &2(E3/"+,4..
5unto con estas aplicaciones ya arraigadas hay otras novedosas en las que si bien la utili$acin del
robot no se reali$a a gran escala, s sejustifica su aplicacinpor las condicionesintrnsecasdel medio de
trabajo #ambientes contaminados, salas as6pticas, construccin, etc.% o la elevadaexigencia en cuanto a
calidad de los resultados #medicina, etc.%. Estos robots se han venido llamando robots de servicio
&E"'E()E*'E*+,1..
En este captulo se repasan las aplicaciones ms frecuentes, destacandolas posibilidades del robot y
sus ventajas frente a otras alternativas. 2simismo, se presentan algunas de las aplicaciones ms
novedosasen sectores como la construccin, medicina, sector el6ctrico, etc.
291
292 Fundamentos de robtica
10.1. CLASIFICACIN
La Federacin Internacional de la Robtica (IFR) estableci en 1988 una clasificacin de las
aplicaciones de la robtica en el sector manufacturero [TORRALVA9!"#La Tabla 1$#1 presenta esta
Tabla 10.1. Clasificacin de las aplicaciones industriales de la
robtica
11$ %anipulacin en fundicin
111 %oldes
119 Otros
1&$ %anipulacin en moldeo de pl'sticos
1($ %anipulacin en tratamientos t)rmicos
1*$ %anipulacin en la for+a y estampacin
1,$ -oldadura
1,1 Al arco
1,! .or puntos
1,& .or /as
1,( .or l'ser
1,9 Otros
10$ Aplicacin de materiales
101 .intura
10! Ad1esi2os y secantes
109 Otros
18$ %ecani3acin
181 4ar/a y descar/a de m'5uinas
18! 4orte mec'nico6 rectificado6 desbarbado y pulido
189 Otros
19$ Otros procesos
191 L'ser
19! 41orro de a/ua
199 Otros
!$$ %onta+e
!$1 %onta+e mec'nico
!$! Insercin
!$& 7nin por ad1esi2os
!$( 7nin por soldadura
!$* %anipulacin para monta+e
!$9 Otros
!1$ .aleti3acin
!!$ %edicin6 inspeccin6 control de calidad
!&$ %anipulacin de materiales
!($ Formacin6 ense8an3a e in2esti/acin
9$$ Otros
~
i
Aplicaciones de los robots 293
clasificacin, que pretende englobar la mayor parte de los procesos robotizados en la actualidad aunque,
como se ha indicado anteriormente, se pueden encontrar aplicaciones particulares que no aparecen de
manera explcita en esta clasificacin. En el siguiente epgrafe se tratan con detalle todas estas
aplicaciones.
10.2. APLICACIONES INDUSTRIALES DE LOS ROBOTS
La implantacin de un robot industrial en un determinado proceso exige un detallado estudio previo del
proceso en cuestin, examinando las ventajas e inconvenientes que conlleva la introduccin del robot.
Ser preciso siempre estar dispuesto a admitir cambios en el desarrollo del proceso primitivo
!modificaciones en el dise"o de piezas, sustitucin de unos sistemas por otros, etc.# que faciliten y hagan
viable la introduccin del robot.
En cuanto al tipo de robot a utilizar, habr que considerar aspectos de diversa ndole como rea de
accin, velocidad de carga, capacidad de control, coste, etc. $stos ya fueron examinados con detalle en el
%aptulo &.
%iertas aplicaciones industriales cuentan en la actualidad con suficiente experiencia en su
robotizacin como para poder fijar unas lneas generales en cuanto a las posibilidades reales del robot en
ellas, as como en cuanto a las dificultades, cambios y ventajas a las que la introduccin del robot puede
dar lugar. El primer proceso robotizado, la fundicin inyectada, instalado en la 'eneral (otors !)renton#
en *&+,, cuenta con ms de tres d-cadas de antig.edad, tiempo suficiente como para que se hayan
valorado con detalle las ventajas e inconvenientes del robot.
/ continuacin van a ser analizadas algunas de las aplicaciones industriales de los robots. 0ando una
breve descripcin del proceso, exponiendo el modo en el que el robot entra a formar parte d- -l, 1
considerando las ventajas e inconvenientes. 2or 3ltimo, en algunos casos, se presentar y comentar
alguna aplicacin prctica real.
10.2.1. Trabajos en fundicin
La fundicin por inyeccin fue el primer proceso robotizado !*&+,#. En este proceso el material. usado,
en estado lquido, es inyectado a presin en el molde. Este 3ltimo est formado por dos mitades que se
mantienen unidas durante la inyeccin del metal mediante la presin ejercida por dos cilindros. La pieza
solidificada se extrae del molde y se enfra para su posterior desbarbado. El molde, una vez limpio de
residuos de restos de metal y adecuadamente lubricado, puede ser usado de nuevo.
En la fundicin por inyeccin el robot puede realizar numerosas tareas auxiliares !4igura *,.*# como
son5
6 Extraccin de las piezas del molde y transporte de -stas a un lugar de enfriado y posteriormente
a otro proceso !desbarbado, corte, etc.#.
294 Fundamentos de robtica
Figura 10.1. Robot MOTOMAN en una clula de fundicin por inyeccin.
(Cortesa de Yaskawa.
Limpieza y mantenimiento de los moldes eliminando rebabas (por aplicacin de aire comprimi
do) y aplicando el lubricante.
Colocacin de piezas en el interior de los moldes (embutidos).
Las cargas manejadas por los robots en estas tareas suelen ser medias o altas (del orden de decenas de
kilogramos), no necesitan una gran precisin (salvo tal vez si deben colocar piezas en el interior del
molde) y su campo de accin ha de ser grande. u estructura m!s "recuente es la polar y la articular. u
sistemade control es por lo general sencillo.
#tro proceso de "undicin es el denominado "undicin a la cera perdida, por micro"usin o a la
c!scara. $ste sistemapermite "undir piezas con una gran precisin y buen acabado super"icial.
$n este proceso, el robot puede realizar las tareas relativas a la "ormacin del molde de material
re"ractario a partir del modelo de cera, por sucesivas inmersiones controladas del mismo en ba%os de
arenas re"ractarias. $l robot, dotado de una pinza especial, recoge un racimo de modelos (conjunto de
varios modelo unidos) y lo introduce en una masa de grano "ino, intercalando e&tracciones y
centri"ugacionespara conseguir un reparto uni"orme del recubrimiento. 'arios robots en serie pueden ir
introduciendo secuencialmente los racimos en di"erentes tipos de arenas y, por (ltimo, en un horno,
pudi)ndoseconseguir un proceso continuo de "abricacin de moldes.
10.2.2. Soldadura
La industria automovil*stica ha sido la gran impulsora de la robtica industrial, empleando la mayor
parte de los robots hoy en d*a instalados. La tarea m!s "recuentemente robotizada dentro de la
Aplicaciones de los robots 295
' !
' 1
fabricacin de automviles ha sido sin duda alguna la soldadura de carroceras. En este proceso, dos
piezas metlicas se unen en un punto por la fusin conjunta de ambas partes, denominndose a este tipo
de soldadurapor puntos.
Para ello, se hace pasar una corriente elctrica de elevada intensidad 1 !"" #$ %baja tensin a travs
de dos electrodos enfrentados entre los &ue se sit'an las piezas a unir. (os electrodos instalados en una
pinza de soldadura, deben sujetar las piezas con una presin determinadade lo &ue depende la precisin
de la soldadura$. #dems deben ser controlados los niveles de tensin e intensidad necesarios, as como
el tiempode aplicacin. )odo ello e*ige el empleo de un sistema de control del proceso de soldadura.
(a robotizacin de la soldadura por puntos admite dos soluciones+ el robot transporta la pieza
presentando sta a los electrodos &ue estn fijos, o bien, el robot transporta la pinza de soldadura
posicionando los electrodos en el punto e*acto de la pieza en el &ue se desea realizar la soldadura. El
optar por uno u otro mtodo depende del tama,o, peso y manejabilidadde las piezas.
En las grandes lneas de soldadura de carroceras de automviles, stas pasan secuencialmente por
varios robots dispuestos frecuentemente formando un pasillo. -na vez situada una carrocera en el
pasillo, los robots, de manera coordinada, posicionan las pinzas de soldadura realizando varios puntos
consecutivamente.
(a gran demanda de robots para la tarea de soldadura por puntos ha originado &ue los fabricantes
desarrollen robots especiales para esta aplicacin &ue integran en su sistema de programacin el control
de la pinza de soldadura &ue portan en su e*tremo .igura 1 "./$.
(os robots de soldadura por puntos precisan capacidad de carga del orden de los !"01 "" 1g y
estructura articular, con suficientes grados de libertad ! o 2$ como para posicionar y orientar la pinza de
Figura 10.2. Robot IRB 6000 realizando un punto de soldadura en una carrocera de automvil.
(Cortesa ABB Robtica.
296 Fundamentos de robtica
Figura 10.3. Robot MOTOMAN aplicando un cordn de soldadura. (Cortesa de Yaskawa.)
soldadura (o pieza, segn el caso) en lugares de difcil acceso. En cuanto al control suele ser suficiente
con un control punto a punto (PTP).
El otro tipo de soldadura, tambin ampliamente robotizado aun!ue en menor grado !ue el anterior, es
el de soldadura por arco. En ella se unen dos piezas mediante la aportaci"n de un flu#o de$ material
fundido procedente de una %arilla de metal (electrodo). &n arco elctrico, entre la pieza a soldar ' el
electrodo, origina las altas temperaturas !ue funden este ltimo. (a calidad de la soldadura depende de la
distancia entre pieza ' electrodo, de la %elocidad de desplazamiento del electrodo por la tra'ectoria de
soldadura, de la tensi"n e intensidad empleadas, del )ngulo de ata!ue del electrodo, etc.
(a dificultadde mantener constantes las %ariables antes citadas, #unto con el ambiente poco agradable
en el !ue se desarrolla la soldadura por arco (radiaci"n ultra%ioleta, *umo, c*ispas, etc.) propician !ue el
robot sustitu'aal *ombre en este proceso.
(os robots de soldadura por arco cuentan con una pistola !ue aporta el alambre del electrodo (%er
Figura 10..). Para realizar cordones de soldadura siguiendo caminos complicados, precisan un control
de tra'ectoria continua. +o precisan gran capacidad de carga (l, -g.), pero s un amplio campo de
acci"n (alrededor de . m. de radio) ' un nmero ele%ado de grados de libertad (/ o 0), incorporando
incluso el control de e#es e1ternos !ue mue%en el utilla#e !ue soporta a la pieza. En ocasiones, ' para
aumentar la accesibilidad del robot, se dispone suspendido sobre las piezas a soldar. Esto permite cubrir
grandes superficiesposicionando ' orientando la pistola a lo largo de complicadas tra'ectorias.
2lgunos fabricantes *an dotado a las unidades de control de sus robots de instrucciones especiales
para efectuar la soldadura por arco, pudindose especificar los par)metros de soldadura. 2simismo, la
1
Aplicaciones de los robots 297
posible imprecisin en el posicionamiento de las piezas a unir dificulta el posicionado inicial y
seguimientodel cordn. Por ello, algunos robots incluyen sensores especiales para localizar el comienzo
y seguir el cordn de manera automtica. .
Estos sistemas de seguimientodel cordn estn basados normalmenteen sensores lser. Este es capaz
de detectar inicialmente la posicin de comienzo del cordn as como de determinar su anchura para,
posteriormente, seguir el cordn. Se consiguen as precisiones del orden de 0,5 mm a velocidades de 0
rnmIs.
10.2.3. Aplicacin de materiales. Pintura
El acabado de superficies por recubrimiento de un cierto material !pintura, esmalte, partculas de metal,
etc." con fines decorativos o de proteccin, es una parte crtica en muchos procesos de fabricacin.
#anto en la pintura como en el metalizado, esmaltado o arenado, la problemtica a resolver es similar,
siendo la primera la $ue cuenta con mayor difusin. Su empleo est generalizado en la fabricacin de
automviles,electrodom%sticos,muebles, etc.
En estos procedimientos se cubre una superficie !de forma tridimensional y en general complicada"
con una mezcla de aire y material !pintura" pulverizada mediante una pistola. Es preciso conseguir una
perfecta homogeneidaden el reparto de la pintura, realizndose para ello un control de la viscosidad, de
la distancia entre pieza y pistola, velocidad&de movimiento de %sta, n'mero de pasadas, etc. #odos estos
parmetros son tradicionalmentecontrolados visualmentepor el operario.
Figura 10.4. Robots en aplicacin de pintura sobre la carrocera de un automvil.
(Cortesa de FANUC.)
298 Fundamentos de robtica
Por otra parte el entorno en el que se realiza la pintura es sumamente desagradable y peligroso. En l
se tiene simultneamente un reducido espacio, una atmsfera txica, un alto nivel de ruido, un riesgo de
incendio, etc. Estas circunstancias han hecho de la pintura y operaciones afines, un proceso de
interesante robotizacin. Con el empleo del robot se eliminan los inconvenientes ambientales y se gana
en cuanto a homogeneidad en la calidad del acabado, ahorro de pintura y productividad.
ormalmente los robots de pintura son espec!ficos para este fin. "uelen ser robots articulares, ligeros,
con # o ms grados de libertad que les permiten proyectar pintura en todos los huecos de la pieza.
Cuentan con protecciones especiales para defenderse de las part!culas en suspensin dentro de la cabina
de pintura y sus posibles consecuencias $explosiones, incendio, deterioros mecnicos, etc.%. $&er la
'igura lOA.)
Este mismo motivo origina que, en muchos casos, el accionamiento de los robots de pintura sea
hidrulico, o de ser elctrico los cables vayan por el interior de conductos a sobrepresin, evitndose as!
el riesgo de explosin.
(al vez la caracter!stica fundamental de los robots dedicados a estas tareas sea su mtodo de
programacin. )bviamente es preciso que cuenten con un control de trayectoria continua, pues no basta
con especificar el punto inicial y final de sus movimientos, sino tambin el camino seguido. "in
embargo, cuando la pintura es realizada por un operario experimentado, ste no conoce el camino con
precisin milimtrica, siendo cada vez diferente. Por este motivo, no es posible especificar el camino a la
unidad de control del robot mediante trayectorias procedentes de una interpolacin $lineal, circular, etc.%.
El mtodo normal de programacin de estos robots es el de aprendiza*e con un muestreo continuo de la
trayectoria. El operario realiza una vez el proceso de pintura con el propio robot o mediante un maniqu!,
mientras que la unidad de programacin registra continuamente, y de manera automtica, gran cantidad
de puntos para su posterior repeticin $esto motiva que su capacidad de memoria no se mida por el
n+mero de puntos a almacenar, sino por el tiempo durante el que se puede estar registrando puntos%.
Figura 10.5. Aplicacin robotizada de sellante sobre una carrocera de automvil.
(Cortesa de Kremlin.)
1
Aplicaciones de los robots 299
10.2.4. Aplicacin de adhesivos y sellantes
Los robots son frecuentemente utilizados para la aplicacin de cordones de material sellante o adhesivos
en la industria del automvil (sellante de ventanas y parabrisas, material anticorrosin en los bajos del
coche, etc.). (Figura 10..)
!n este proceso el material a aplicar se encuentra en forma l"#uida o pastosa en un tan#ue, siendo
bombeada hasta la pistola de aplicacin #ue porta el robot, #ue regula el caudal de material #ue es
proyectado.
!l robot, siguiendo la trayectoria preprogramada, proyecta la sustancia #ue se solidifica al contacto
con el aire. !n este proceso, tan importante corno el control preciso de la trayectoria del robot, es el
control sincronizado de su velocidad y del caudal de material suministrado por la pistola, puesto #ue
la cantidad de material proyectado en un punto de la pieza depende de ambos factores.
!s habitual una disposicin de robot suspendido sobre la pieza, siendo necesario, por los motivos
antes e$puestos, #ue el robot tenga capacidad de control de trayectoria continua (posicin y velocidad
regulados con precisin), as" corno capacidad de integrar en su propia unidad de control la regulacin
del caudal de material aportado en concordancia con la velocidad del movimiento.
10.2.5. Alimentacin de mquinas
La alimentacin de m%#uinas especializadas es otra tarea de manipulacin de posible robotizacin. La
peligrosidad y monoton"a de las operaciones de carga y descarga de m%#uinas como prensas,
estampadoras, hornos o la posibilidad de usar un mismo robot para transferir una pieza a trav&s de
diferentes m%#uinas de procesado, ha conseguido #ue gran n'mero de empresas hayan introducido
robots en sus talleres.
Figura 10.(. Robot IRB 2000 descargando piezas termoplsticas de una mquina de inyeccin.
(Cortesa ABB Robtica.
300 Fundamentos de robtica
En la industria metalrgica se usan prensas para conformar los metales en fro o, para mediante
estampacin y embutido, obtener piezas de complicadas formas a partir de planchas de metal. En
ocasiones la misma pieza pasa consecutivamente por varias prensas hasta conseguir su forma definitiva.
La carga y descarga de estas mquinas se realiza tradicionalmente a mano, con el elevado riesgo que esto
conlleva para el operario, al que una pequea distraccin puede costarle un serio accidente.
Estas circunstancias, unto con la superior precisin de posicionamiento que puede conseguir el
robot, y la capacidad de !ste de controlar automticamente el funcionamiento de la mquina y
dispositivos au"iliares, han hecho que el robot sea una solucin ventaosa para estos procesos #ver
$igura %&.'(.
)or otra parte, los robots usados en estas tareas son, por lo general, de baa compleidad, precisin
media, nmero reducido de grados de libertad y un control sencillo #)*)(, bastando en ocasiones con
manipuladores secuenciales. +u campo de accin interesa que sea grande. En cuanto a la carga, vara
mucho, pudi!ndose necesitar robots con capacidad de carga de pocos ,ilogramos, hasta de algunos
cientos #e"istenrobots capaces de manipular hasta tonelada y media(.
Las estructuras ms frecuentemente usadas son la cilndrica, esf!rica y articular. *ambi!n la
cartesiana#no prtico( puede aportar en ocasiones la solucin ms adecuada.
-tencin especial merece la aplicacin del robot en las c!lulas fle"ibles de mecanizado, que han
adquirido gran auge en los ltimos aos. .stas emplean centros de mecanizado o varias mquinas de
control num!rico #/0( para conseguir compleos y distintos mecanizados sobre las piezas. En los centros
de mecanizado se realiza sobre una pieza los diferentes procesos de mecanizacin para dar a !sta la
forma programada. La capacidad de programacin de estas mquinas permite una produccin fle"ible de
piezas, adaptndose as perfectamente a las necesidades del mercado actual #pequeas y variadas series,
etc!tera(.
Estas mquinas emplean diferentes herramientas que se acoplan a un cabezal comn de manera
automticacuando el proceso de mecanizado lo precisa. Las herramientas a usar en un proceso concreto
son almacenadasen tambores automticos que permiten un rpido intercambiode la herramienta.
El robot es el complemento ideal de estas mquinas. +us tareas pueden comenzar con la recogida de
la pieza del sistema de transporte y su carga en la mquina de mecanizado. /uando esta finaliza su
programa, el robot retira la pieza para dearla en el sistema de transporte encargado de evacuarlas o para
llevarla a otra mquina #o a la misma tras un cambio de orientacin(. -simismoel robot puede ocuparse
de cargar el alimentador automtico de herramientas de la mquina, reponiendo herramientas gastadas o
seleccionandolas adecuadas para la produccin de una determinada pieza.
En las c!lulas de multiproceso el mismo robot alimenta a varias mquinas o centros de mecanizado.
1na misma pieza, transportada por el robot, puede ir pasando de una mquina a otra, incluyendo
controles metrolgicosde calidad u otras tareas de calibracin #$igura %&.2(.
La sincronizacin de toda la c!lula #alimentadores, centros de mecanizado, robots, etc.( puede ser
realizada por la propia unidad de control del robot que cuenta, por lo general, con gran potencia de
clculo y capacidad de maneo de entradas y salidas.
En ocasiones estas c!lulas cuentan con sistemas multirobot, trabaando !stos de manera secuencial
con la pieza. 3asta la fecha no e"isten apenas realizaciones prcticas de cooperacin de robots de
manera coordinada 45675891E:;<=>.
Las caractersticas de los robots para estas tareas de alimentacin de mquinas herramientas son por
lo general similares a las necesarias para la alimentacin de otras mquinas. Las nicas discrepancias
estribanen su mayor precisin y capacidad de carga inferior #decenas de ,ilogramoa lo sumo(.
%
Aplicaciones de los robots 301
Figura 10.7. Robot IR 761/125.0 en clula de tratamiento (fresado, taladrado, serrado, etc.) de
componentes de aluminio. (Cortesa de !"!#.)
10.2.6. Procesado
Dentro del procesado se incluyen aquellas operaciones en las que el robot enfrenta pieza y herramientas
(transportandouna u otra) para conseguir, en general, una modificacinen la forma de la pieza.
El desbarbado consiste en la eliminacin de rebabas de las piezas de metal o plstico, procedentes de
un proceso anterior (fundicin, estampacin, etc.). Esta operacin se realiza manualmente con una
esmeriladorao fresa, dependiendo la herramienta de las caractersticas del material a desbarbar. Un robot
dedicado al desbarbado porta la herramienta o la pieza, segn la aplicacin, haciendo entrar en contacto
ambas. !a herramienta debe seguir el contorno de la pieza, que en muchas ocasiones es comple"o, con
ele#ada precisin en su posicionamiento y #elocidad. $or este moti#o se precisan robots con capacidad
de control de trayectoria continua y buenas caractersticas de precisin y control de #elocidad. %dems,
puesto que las rebabas con que #ienen las piezas presentan formas irregulares, con#iene que el robot
posea capacidad para adaptarse a &stas mediante el empleo de sensores o el desarrollo de un elemento
terminal del robot autoadaptable ('igura ().*).
302 Fundamentos de robtica
Figura 10.8. Robot IRB 2000 realizando el desbarbado de caperuzas de fundicin gris
para bombas de aceite. (Cortesa de ABB Robtica.)
Parecida al desbarbado en cuanto a necesidades es la aplicacin de pulido, cambiando bsicamente la
herramienta a emplear. Las necesidades de precisin y de empleo de sensores son tal vez en este caso
menos exigentes.
10.2.7. Corte
El corte de materiales mediante robot es una aplicacin reciente que cuenta con notable inters. La
capacidad de reprogramacin del robot y su integracin en un sistema C!, hacen que aquel sea el
elemento ideal para transportar la herramienta de corte sobre la pieza, realizando con precisin un
programade corte de"inido previamente desde un sistema de #ise$o %sistido por Computador &C%#'.
Los mtodos de corte no mecnico ms empleados son oxicorte, plasma, lser y chorro de agua,
dependiendo de la naturaleza del material a cortar. En todos ellos el robot transporta la boquilla por la
que se emite el material de corte, proyectando ste sobre la pieza al tiempo que sigue una trayectoria
determinada&(igura )*.+'.
Las piezas a cortar pueden disponerse en varias capas, unas encima de otras, realizndose el corte
simultneode todas ellas &corte de patrones en la industria textil'.
,i bien el oxicorte y el corte por plasma son tecnolog-as muy extendidas y consecuentemente bien
conocidas, no ocurre lo mismo con el corte por lser y por chorro de agua, de ms reciente aparicin. La
disposicint-pica del robot en el corte por chorro de agua es la de robot suspendido traba.ando sobre las
piezas "undamentalmenteen direccin vertical.
/,
I
;
Aplicaciones de los robots 303
, l .
ii'
i
ii
: 1
. ,
1 1 ,
'1
1 ,
il
i
: 1
Figura 10.9. Corte por l ser robotizado de pl anchas de al uminio. (Cortesa de KUKA. )
Figura 10.10. Robot R!" en apl icaci#n de corte por chorro de a$ua. (Cortesa de %ta&bl i. )
304 Fundamentos de robtica
El robot porta una boquilla de pequeo dimetro (normalemente de 0,1 mm.) por la que sale un
chorro de agua, en ocasiones con alguna sustancia abrasiva, a una velocidad del orden de 900 mis, y a
una presin del orden de 000 !g"cm#, El sistema completo precisa de bomba, intensi$icador, reguladores
de presin y electrovlvulas [DRAUGHTON-93].
El corte por chorro de agua puede aplicarse a materiales como alimentos, $ibra de v%drio, &'(,
mrmol, madera, goma espuma, neopreno, yeso, tela, cartn, e incluso a metales como aluminio, acero y
titanio. En estos casos se aade al agua una sustancia abrasiva.
)as principales venta*as del corte por chorro de agua $rente a otros sistemas son+
, -o provoca un aumento de temperatura en el material.
, -o es contaminante.
, -o provoca cambios de color.
, -o altera las propiedades de los materiales.
, (oste de mantenimiento ba*o.
)os robots empleados precisan control de trayectoria continua y elevada precisin. .u campo de
accin var%a con el tamao de las pie/as a cortar, siendo en. general de envergadura media (de 1 a 0
metros de radio). En este sentido, como se ha comentado, con mucha $recuencia se dispone al robot
suspendidoboca aba*o sobre la pie/a (1igura 10.10).
10.2.8. Montaje
)as operaciones de monta*e, por la gran precisin y habilidad que normalmente e2igen, presentan
grandes di$icultades para su automati/acin $le2ible. .in embargo, el hecho de que estas operaciones
representen una buena parte de los costes totales del producto, ha propiciado las investigaciones y
desarrollosen este rea, consigui3ndose importantes avances.
4uchos procesos de ensamblado se han automati/ado empleando mquinas especiales que $uncionan
con gran precisin y rapide/. .in embargo, el mercado actual precisa de sistemas muy $le2ibles, que
permitan introducir $recuentes modi$icaciones en los productos con unos costes m%nimos. &or este
motivo, el robot industrial se ha convertido en muchos casos en la solucin ideal para la automati/acin
del ensambla*e.
En particular, el robot resuelve correctamente muchas aplicaciones de ensamblado de pie/as
pequeas en con*untos mecnicos o el3ctricos (1igura 10.11). &ara ello el robot precisa toda una serie de
elementos au2iliares cuyo coste es similar o superior al del propio robot. Entre 3stos cabe destacar los
alimentadores (tambores vibradores, por e*emplo), posicionadores y los posibles sensores que usa el
robot para ayudarseen su tarea (es$uer/os, visin, tacto, etc.).
Estos sensores son indispensables en muchos casos debido a las estrechas tolerancias con que se
traba*a en el ensambla*e ya los inevitables errores, aunque sean muy pequeos, en el posicionamientode
las pie/as que entran a tomar parte en 3l.
)os robots empleados en el ensambla*e requieren, en cualquier caso, una gran precisin y
repetitividad, no siendo preciso que mane*en grandes cargas. El tipo .(565 ha alcan/ado gran
popularidad en este tipo de tareas por su ba*o coste y buenas caracter%sticas. 7stas se consiguen por su
adaptabilidad selectiva, presentando $acilidad para desviarse, por una $uer/a e2terna, en el plano
l
Aplicaciones de los robots 305
1
j i ]
' 1 '
1
Figura 10.11. Montaj e de faros de automvi l con un robot pendular ti po IRB 1 000.
(Cortesa de !BB Robti ca."
horizontal y una gran rigidez para hacerlo en el eje vertical. Tambin se usan con frecuencia robots
cartesianos por su elevada precisin y, en general, los robots articulares que pueden resolver muchas de
estas aplicaciones con suficiente efectividad.
La dificultad inherente a este tipo de tareas obliga, en casi todos los casos, a facilitarlas con un
adecuado rediseo de las partes que componen el conjunto a ensamblar. e este modo, conjuntos cuyo
ensamblaje automatizado ser!a inabordable con su diseo inicial, pueden ser montados de una manera
competitivamediante el empleo de robots.
10.2.9. Paletizacin
La paletizacin es un proceso b"sicamente de manipulacin, consistente en disponer piezas sobre una
plataforma o bandeja #palet$. Las piezas en un palet ocupan normalmente posiciones predeterminadas,
procurando asegurar la estabilidad, facilitar su manipulacin y optimizar su e%tensin. Los palets son
transportadospor diferentes sistemas #cintas transportadoras, carretillas, &'(, etc.$ llevando su carga de
piezas, bien a lo largo del proceso de fabricacin, bien hasta el almacn o punto de e%pedicin.
ependiendo de la aplicacin concreta, un palet puede transportar piezas idnticas #para
almacenamiento por lotes por ejemplo$, conjuntos de piezas diferentes, pero siempre los mismos
306 Fundamentos de robtica
1
i
,
(subconjuntos procedentes de ensamblados) o cargas de piezas diferentes y de composicin aleatoria
(formacinde pedidos en un almacn de distribucin).
Existen diferentes tipos de mquinas especficas para realizar operacionesde paletizado. Estas, frente
al robot, presentan entajas en cuanto a elocidad y coste, sin embargo, son rgidas en cuanto a su
funcionamiento,siendo incapaces de modificar su tarea de carga y descarga.
!s pues, los robots realizan con entaja aplicaciones de paletizacin en las que la forma, n"mero o
caractersticas generales de los productos a manipular, cambian con relatia frecuencia (#igura $%.$&).
En estos casos, un programa de control adecuado permite resoler la operacin de carga o descarga,
optimizandolos moimientos del robot, aproec'ando al mximo la capacidad del palet o atendiendo a
cualquier otro imperatio.
(eneralmente, las tareas de paletizacin implican el manejo de grandes cargas, de peso y
dimensioneseleadas. )or este motio, los robots empleados en este tipo de aplicaciones acostumbran a
ser robots de gran tama*o, con una capacidad de carga de $% a $%%+g. ,o obstante, se pueden encontrar
aplicacionesde paletizacin de peque*as piezas, en las que un robot con una capacidad de carga de - +g
es suficiente.
.as denominadas tareas de pick & place, aunque en general con caractersticas diferentes al
paletizado, guardanestrec'a relacin con ste.
.a misin de un robot trabajando en un proceso de pick &place consiste en recoger piezas de un
lugar y depositarlas en otro. .a complejidad de este proceso puede ser muy ariable, desde el caso ms
sencilloen el que el robot recoge y deja las piezas en una posicin prefijada, 'asta aquellas aplicaciones
en las que el robot precise de sensores externos, como isin artificial o tacto, para determinar la
posicinde recogida y colocacin de las piezas.
Figura 10.12. Paleti zado medi ante robot de di versas cajas de productos. (Cortesa de FANUC.
Aplicaciones de los robots 307
Figura 10.13. Robot AdeptThree en clula de picking de cartones de tabaco.
(Cortesa de DISAM-UPM.)
Al contrario que en las operaciones de paletizado, las tareas de picking suelen realizarse con piezas
pequeas (peso inferior a los 5 kg) necesitndose velocidad y precisin.
Un ejeplo t!pico de aplicacin del ro"ot al paletizado ser!a la foracin de palets de cajas de
productos alienticios procedentes de la l!nea de epaquetado. #n estos casos, cajas de diferentes
productos llegan aleatoriaente al capo de accin del ro"ot. All! son identificadas "ien por una c$lula
de carga, por alguna de sus diensiones, o por un cdigo de "arras. %onocida la identidad de la caja, el
ro"ot procede a recogerla y a colocarla en uno de los diferentes palets que, de anera siultnea, se
estn forando. #l propio ro"ot gestiona las l!neas de alientacin de cajas y de palets, a la vez que
toa las decisiones necesarias para situar la caja en el palet con la posicin y orientacin adecuadas de
una anera fle&i"le ('igura ().(*). #l ro"ot podr!a ir equipado con una serie de ventosas de vaco y su
capacidadde carga estar!a en too a los 5) kg.
10.2.10. Control de calidad
+a tendencia a conseguir una copleta autoatizacin de la produccin a"arca todas las etapas de $sta,
inclusiveel control de calidad.
#l ro"ot industrial puede participar en esta tarea usando su capacidad de posicionaiento y
anipulacin. As!, transportando en su e&treo un palpador, puede realizar el control diensional de
piezas ya fa"ricadas. ,ara ello el ro"ot toca con el palpador varios puntos claves de la pieza. A partir del
conociientoque en todo instante tiene la unidad de control del ro"ot de la posicin y orientacin de su
e&treo, se o"tienen los datos relativos a la posicin espacial de los puntos deterinados de la pieza.
#stos datos son utilizados para registrar posi"les desviaciones so"re los valores deseados ('igura ().(-).
1
308 Fundamentos de robtica
Figura 10.14. Robot cartesiano BRAVO 2207 realizando el control dimensional del lateral
de un automvil. (Cortesa de DA.!
Otras posibles aplicaciones del robot en el control de calidad consisten en utilizar a ste para
transportar el instrumental de medida (ultrasonidos, rayos X, etc.) a puntos concretos de la pieza a
examinar. La situacin de posibles defectos detectados puede registrarse y almacenarse a partir, como
antes, de la propia unidad de control de robot (Figura 1.1!).
"or #ltimo, el robot puede usarse como mero manipulador encargado de clasificar piezas seg#n
ciertos criterios de calidad (piezas correctas e incorrectas, por e$emplo). %n este caso, el control y
decisin de a &u familia pertenece la pieza se 'ace mediante un sistema espec(fico, capaz de
comunicarsecon el robot ()isin artificial, sistema de pesa$e, etc.).
*o existe, en este caso, un tipo concreto de robot m+s adecuado para estas tareas. %n el control
dimensional suelen usarse robots cartesianos por la precisin de stos pero, en general, son igualmente
)+lidos robots articulares.
10.2.11. Manipulacin en salas blancas
,iertos procesos de manipulacin deben ser realizados en ambientes extremadamente limpios o-y
controlados. %n ellos, la acti)idad del operador se )e dificultado no por el traba$o en s(, &ue no tiene
por&u ser especialmente comple$o o delicado, sino por la necesidad de mantener ele)adas medidas de
control de impurezas mediante el uso de tra$es especiales y controles rigurosos. Las denominadas salas
blancas de la industria de los semiconductores o las salas de fabricacin de algunos productos
farmacuticos, son e$emplos t(picos.
Aplicaciones de los robots 309
Figura 10.15. Robots IRS 60 realizando un control de calidad por ultrasonidos.
(Cortesa de DISAM-UPM.)
Diversos procesos de la industria farmacutica, como la produccin de vacunas y hormonas, o la
preparacin de injertos de piel y reproduccin de clulas, deben ser realizadas bajo estrictas condiciones
de esterilidad. La manipulacin de estos productos durante su fabricacin se realiza en cabinas con
proteccin de clase 10, en las que los operadores deben pasar por un minuciosoproceso de esterilizacin
antes de entrar al interior.
Las funciones tpicas de manipulacin a realizar en estos procesos son la recoida de una de las
probetas que contienen el producto en fase de fabricacin, su apertura, la adicin de al!n nuevo
producto, iro de la probeta, etc.
La utilizacinde un robot para estas funciones se realiza introduciendoste de manera permanente en
la cabina. "l robot debe cumplir la normativa correspondiente al entorno de clase 10, siendo por lo
dem#s v#lido cualquier robot comercial, normalmente de seis rados de libertad y alcance inferior a un
metro. De este modo se consiue, entre otros beneficios, una reduccin del rieso de contaminacin, una
mayor homoeneidad en la calidad del producto, y una reduccin en el coste de la fabricacin $ver
. %iura 10.1&'.
(on menos e)iencias de limpieza que las demandadas en la fabricacin de semiconductores o en la
industria farmacutica, la industria alimenticia puede hacer uso de robots para la preparacin o
procesado de alimentos. La preparacin de bandejas de comida (catering), la preparacin de cajas de
hamburuesas$%iura 10.1*' o incluso el corte de piezas de carne en un matadero, son alunos ejemplos
de sistemas hoy en da en funcionamiento.
l'
1
!
310 Fundamentos de robtica
Figura 10.16. Manipulacin de obleas en una sala blanca. (Cortesa de Stabli.)
Figura 10.17. Preparacin robotizada de cajas de hamburguesas en la industria alimentaria.
(Cortesa de F!"C.)
Aplicaciones de los robots 311
10.3. NUEVOS SECTORES DE APLICACIN DE LOS ROBOTS.
ROBOTS DE SERVICIO
Las aplicaciones de la robtica examinadas anteriormente responden a los sectores que, como el del
automvil o de la manufactura, han sido desde hace 30 aos usuarios habituales de los robots
industriales. Este uso extensivo de los robots en los citados sectores se ha visto propiciado por la buena
adaptacin del robot industrial a las tareas repetitivas en entornos estructurados. De este modo, la
competitividaddel robot frente a otras soluciones de automatizacinsejustifica por su rpida adaptacin
a series cortas, sus buenas caracter!sticas de precisin " rapidez, " por su posible reutilizacin con costes
inferiores a los de otros sistemas.
#in embar$o, existen otros sectores donde no es preciso conse$uir elevada productividad, en los que
las tareas a realizar no son repetitivas, " no existe un conocimientodetallado del entorno.
Entre estos sectores podr!a citarse la industria nuclear, la construccin, la medicina o el uso
dom%stico. En nin$uno de ellos existe la posibilidad de sistematizar " clasificar las posibles aplicaciones,
pues %stas responden a soluciones aisladas a problemas concretos.
Este tipo de robots ha venido a llamarse robots de servicio " pueden ser definidos como &'(#)*+'D,
-0./
0 1n dispositivo electromecnico, mvil o estacionario, con uno o ms brazos mecnicos, capa2
ces de acciones independientes.
Estos robots estn siendo aplicados en sectores como/
0 +$ricultura " silvicultura.
0 +"uda a discapacitados.
0 3onstruccin.
0 Dom%sticos.
0 Entornos peli$rosos.
0 Espacio.
0 4edicina " salud.
0 4iner!a.
0 #ubmarino.
0 5i$ilancia " se$uridad.
En $eneral, la aplicacin de la robtica a estos sectores se caracteriza por la falta de estructuracin
tanto del entorno como de la tarea a realizar, " la menor importancia de criterios de rentabilidad
econmicafrente a la de realizar tareas en entornos peli$rosos o en los que no es posible el acceso de las
personas.
312 Fundamentos de robtica
Estas caractersticas obligan a que los robots de servicio cuenten con un mayor grado de inteligencia,
que se traduce en el empleo de sensores y del software adecuado para la toma rpida de decisiones.
Puesto que en muchas ocasiones el estado actual de la inteligencia artificial (disciplina que aborda esta
problemtica) no est lo suficientemente desarrollado como para resolver las situacionesplanteadas a los
robots de servicio, es frecuente que stos cuenten con un mando remoto, siendo en muchas ocasiones
robots teleoperados.
entros de investigaci!n en rob!tica, como la "niversidad arnegie#$ellon o el %et Propulsion
&aboratory (%P&) en Estados "nidos, han orientado desde hace tiempo buena parte de sus esfuer'os de
investigaci!nen rob!tica en esta lnea, desarrollando robots especiali'ados, capacitados para traba(ar en
el e)terior, en entornos no estructurados y peligrosos (superficie de planetas, volcanes, desastres
nucleares, etc.).
$uchos de estos sistemas responden en buena medida a los conceptos de telemanipulador o robot
teleoperado, que quedan fuera de los ob(etivos de este te)to, remitindose al lector a te)tos
especiali'ados [SHERIDAN-92].
Para dar una idea general de las posibilidades de la rob!tica en estos sectores, se van a comentar
algunas aplicaciones concretas en las que el robot ha aportado me(oras y beneficios al proceso primitivo.
10.3.1. Industria nuclear
Por sus especiales caractersticas, el sector nuclear es uno de los ms susceptibles de utili'ar robots de
dise*o especfico +,-.&E#/01. Entre las diversas aplicaciones se han escogido aqu, por su especial
relevancia, las relativas a operaciones de mantenimiento en 'onas contaminadas y de manipulaci!n de
residuos.
Inspeccin de los tubos del generador de vapor de un reactor nuclear
&as operacionesde inspecci!n y mantenimiento de las 'onas ms contaminadasde una central nuclear de
producci!nde energa elctrica son por naturale'a largas y costosas.
2e reali'arlas manualmente, el tiempo de e)posici!n de los operadores a la radiaci!n es un factor
crtico que, (unto con el elevado coste que supone una interrupci!n temporal del funcionamiento del
sistema en cuesti!n, (ustifica sin ning3n lugar a dudas la utili'aci!n de sistemas roboti'ados,
normalmenteteleoperados, total o parcialmente, que sustituyan al operador.
En el generador de vapor se produce el intercambio de calor entre el fluido primario y secundario.
Para ello, dentro de la vasi(a del generador, se encuentran dispuestas en forma matricial los tubos por los
que circula el fluido receptor del calor.
El inevitable desgaste de estos tubos obliga a reali'ar peri!dicamente labores de inspecci!n, para que
en el caso de que alguno se encuentre da*ado inutili'arlo, poniendo en funcionamiento alguno de los
tubos de reserva que a tal fin se han dispuesto en el generador.
Para reali'ar esta operaci!n de manera automtica puede utili'arse un robot de desarrollo especfico
que, introducidoen la vasi(a, posicione una sonda de inspecci!n en la boca de cada tubo. 4sta, empu(ada
por el interior del tubo, proporcionar informaci!n sobre el estado del mismo.
Es preciso considerar que el robot se introduce en la vasi(a mediante un sistema mecnico que, (unto
con los posibles errores en la disposici!n matricial de los tubos, obliga a que el robot traba(e, bien con
Aplicaciones de los robots 313
ayuda de teleoperacin, o bien con sistemas sensoriales externos como visin o lser, que proporcionen
la posicin real relativa entre el extremo del robot y los tubos.
Manipulacin de residuos radioactivos
Como se indic en el Captulo 1, los primeros sistemas teleoperados, desarrollados por el Argonne
National Laboratory ANL! tuvieron como ob"etivo la manipulacinde productos radioactivos sin riesgo
para el ser #umano.
La industrianuclear genera una cantidad considerable de residuos radioactivosde ba"a contaminacin
vestimentas, envases de plstico, papel, etc.! o de alta restos de las c$lulas del reactor, materiales en
contacto directo prolongado con las %onas radiactivas, etc.!. La &orma, tama'o y peso de estos desec#os
es variable y su manipulacin tiene por ob"etivo &inal su envase en contenedores especiales, que son
posteriormentetransportados y almacenados lo que origina una nueva problemtica!.
(ara manipular remotamente estos residuos se #ace uso tanto de telemanipuladores con unin
mecnica y seguimiento directo del proceso por parte del operador a trav$s de un cristal caso de ba"a
contaminacin!, como con sistemas con mando remoto por radio o cable en el caso de contaminacin
elevada. )stos manipuladores permiten la &lexibilidad necesaria para manipular elementos de peso
variabley &orma no de&inida incluso no rgidos!.
Adems, es preciso considerar la importancia que tiene la optimi%acin del espacio ocupado por los
residuos en su almacenamiento, por 1* que antes de su envasado en los contenedores puede ser preciso
&ragmentarlos +LA,C-M.)/01 l.
10.3.2. Medicina
2e entre las varias aplicaciones de la robtica a la medicina destaca la ciruga. Las primeras aplicaciones
de la robtica a la ciruga del cerebro datan del a'o 1304. )n esta &ec#a se comen% en Memorial
Medical Center de Long .eac# Cali&ornia! un programa cuyo ob"etivo consista en utili%ar un robot
comercial (5MA 46*! para reali%ar determinadas operaciones de neurociruga. 2esde entonces se #an
puesto a punto varios sistemas que, con la ayuda de un scanner, un ordenador registre toda la
in&ormacin necesaria del cerebro para que el equipo m$dico decida el punto exacto donde debe ser
reali%ada la incisin, donde penetrar la sonda para obtener una muestra para reali%ar una biopsia. )l
robot, que se encuentra per&ectamente situado con respecto al paciente, porta en su extremo los
instrumentos necesarios para reali%ar la incisin, tomar la muestra, etc.
La utili%acin de un robot conectado al ordenador permite que tanto la incisin como la toma de la
muestra se realicen con la mxima precisin y en un tiempo notablemente in&erior al que se consumira
en caso de emplear el sistema #abitual.
Adems, se descarga al ciru"ano de la mecnica de ciertas tareas como el correcto posicionamiento de
los instrumentosde ciruga con respecto al crneo del paciente, permitiendouna mayor concentracin en
el seguimientoy control de la operacin.
7ambi$n, otro posible bene&icio de la aplicacin de la robtica a la ciruga se encuentra en el
telediagnsticoy la teleciruga. )sta 8ltima consiste en la operacin remota de un paciente mediante un
telemanipulador.
)n"ulio de 1339un robot :CA,A en Miln ;talia! reali% sobre el #gado de un cerdo una biopsia y
una incisin para introducir un laparoscopio. )l robot estaba siendo teleoperado en tiempo real desde
314 Fundamentos de robtica
14000 km de distancia en el Jet Propulsion Lab de Pasadena, California. Las rdenes del cirujano y la
informacin procedente de la sala de operaciones eran intercambiadas a travs de satlites de
comunicaciones y redes de fibra ptica.
!sta primera e"periencia en operacin remota permite ase#urar $ue este tipo de intervenciones sobre
pacientes %umanos podr& ser una realidad en un futuro pr"imo. 'u justificacin puede encontrarse en el
tratamiento de pacientes situados en locali(aciones dif)cilmente alcan(ables *espacio, plataformas
submarinas, escenarios blicos, etc.+. ,o obstante %ay $ue considerar $ue a-n e"isten importantes
dificultades tcnicas, como es el retraso en las comunicaciones *en el caso mencionado del orden de
varios se#undos+ y el elevado coste *es preciso, por ejemplo, el uso e"clusivo de los satlites de
comunicaciones+.
10.3.3. Construccin
!l sector de la construccin es, en la mayor)a de los pa)ses industriali(ados, uno de los $ue movili(a
mayor n-mero de recursos econmicos y %umanos. ,o es pues de e"tra.ar $ue desde %ace al#o m&s de
una dcada se estn desarrollando #ran n-mero de sistemas roboti(ados, orientados a automati(ar en lo
posible al#unas de las m-ltiples labores $ue entran a formar parte de los procesos constructivos.
!n este tipo de aplicaciones de la robtica, como en otros muc%os, es Japn el pa)s $ue cuenta con un
mayor n-mero de sistemas en funcionamiento. !n al#unos casos se trata de robots parcialmente
teleoperados, constru)dos a partir de ma$uinaria convencional *#ruas, e"cavadoras, etc.+. !n otros es
ma$uinaria espec)ficamente constru)da para resolver un proceso concreto.
'i se anali(an las condiciones e"istentes para la roboti(acin de la construccin se lle#a entre otras a
las si#uientes conclusiones [PUENTE-95):
/ Las condiciones de trabajo son complejas.
/ Los robots deben tener capacidad de locomocin y cierto #rado de inteli#encia.
/ Los robots deben estar preparados para trabajar en e"teriores, movindose en entornos dif)ciles
y no prote#idos.
/ 0eben manejar pie(as pesadas y de #randes dimensiones.
/ Las operaciones a reali(ar son complejas, variadas y poco repetitivas.
/ Los robots deben ser f&cilmente transportables a la obra.
Con estos condicionantes, las posibles tareas roboti(ables dentro de la construccin de edificios
*comerciales, industriales o residenciales+ podr)an a#ruparse en [OPPENHEIM-90):
1. 1peraciones de colocacin de elementos.
/ Construccin mediante colocacin repetitiva de estructuras b&sicas *ladrillos, blo$ues, etc.+.
/ Posicionamiento de pie(as, normalmente #randes y pesadas *vi#as, etc.+.
/ 2nin de diferentes pie(as $ue componen una estructura *soldadura, remac%es, etc.+.
/ 'ellado de las uniones entre diferentes pie(as.
Aplicaciones de los robots 315
2. Operaciones de tratamiento de superficies.
e Acabado de superficies (pulido, etc.).
e Recubrimiento de superficies con pintura, barniz, etc.
e Extensin de material sobre la superficie (cemento, espuma aislante, etc.).
3. Operaciones de rellenado.
e Vertido de cemento u hormin en encofrados.
! Exca"acin para la preparacin de terrenos y mo"imiento de tierras.
e Rellenado con tierra de "ol#menes "acios.
$. Otras.
e %nspeccin y control.
Tabla 10.2. Aplicacin de la robtica en la industria de la construccin
&enominacin Acti"idad Empresa 'a(s Estado
)urf*Robo )uelos de cemento +a,ena,a -orp. .apn En uso
)oldadura de columnas )himizu -orp. .apn En uso
+#neles /itachi 0osen -orp. .apn En uso
1A2A 1impieza de fachadas 'utzmeister Alemania 'rototipo
3loc,bot -erramiento de ladrillos 2%+ 4)A 1aboratorio
OR-*Auto 'refabricados de OR- &%)A2 *&raados Espa5a En uso
-2*6$ Extraccin de material -ameie*2ellon 4ni". 4)A 'rototipo
7A689 Asfaltado de carreteras :ippon /odo -o. .apn 'rototipo
;omatsu 1td.
RO--O -erramientos y tabi<ues &%)A2*;arlsruhe 4ni". Espa5a* 'rototipo
interiores de edificios Alemania
=uera de la construccin de edificios, cabr(an destacar las realizaciones de robots para la construc>
cin de t#neles, carreteras (asfaltado), inspeccin de estructuras en puentes o muros de edificios dif(>
cilmente accesibles, etc.
1a +abla 69.2 recoe aluna de las realizaciones m?s conocidas en este ?rea [OAMBAO-96]. -omo se
puede obser"ar, destacan los desarrollos @aponeses. :o obstante, debe indicarse <ue, como en otras mu>
chas ocasiones, los robots @aponeses son, en su maAor(a, teleoperados total o parcialmente, mientras <ue
en Europa A EE. 44. existe una maAor tendencia al desarrollo de sistemas con un maAor rado de auto>
nom(a (=iura 69.6B).
316 Fundamentos de robtica
Figura 10.18. Robot ROCCO para la construccin mediante el posicionamiento automtico de
bloques de hormign. (Cortesa DISAM!"M.#
10.4. BIBLIOGRAFA
[ApPLETON-87]E. Appleton y D.J. Williams, Industrial Robot Applications, Halsted Press, Jon Wi!
ley and "ons y Open #ni$ersity Press, %&87.
[D'A#(HTON-&)]'.N. Dra*+ton, ,'o-oti. *ltrai+-press*re /ater0et .*ttin+,, en1 Robotics for
Competitive Industries, 2e.ani.al En+ineerin+ P*-li.ations Limited, London, %&&).
[EN(EL3E'(E'-8&]J.4. En+el-er+er, Robotics in Service, 5o+an Pa+e, Londres, %&8&.
[EN(EL3E'(E'-86]J.4. En+el-er+er, Robotics in Practice, 5o+an Pa+e, Londres, %&86.
Aplicaciones de los robots 317
[FOGLE-93] Fogle, R.F., "Robots and teleoperators in radioactive applications", en: Robotics and Re
mate Systems for Hazardous Environments, Ed. M.a!s"idi # $.%. Eic&er, $rentice-'all, 993.
[G(M)(O-9*]E. Ga!bao, Control de robots con accionamientos hidrulicos. Aplicacin a robots de
randes dimensiones para la construccin, +esis ,octoral, ,-.(M, /niversidad $olit0cnica de
Madrid.
[GROO1ER-29]M.$. Groover et. al , "(plicaciones de robot en 3abricaci4n", en: Robtica industrial.
!ecnolo"a, proramacin y aplicaciones, McGra5-'ill, Madrid, 929.
[L(R6OM)E-27]Larco!be # %.R. 'alsall, Robotics in #uclear Enineerin, 6.E.6., E/R 938E9,
997.
[9O.+R(9,-9:]%.;. 9ostrand # E.L. .a!pson, "Robots in .ervice -nd<str#", en: Concise $nterna
tional Encyclopledia of Robotics, Editor R.6. ,or3, %o"n ;ile# &.ons , 99:.
[O$$E9'E-M-9:]%.. Oppen"ei!, "Robots in 6onstr<ction", en: Concise $nternational Encyclopedia
of Robotics,%Editor. R.6. ,or3=, %o"n ;ile# and .ons, 99:.
[$/E9+E-9>]E.(. $<ente, #uevos robots para nuevas aplicaciones. Robtica en la construccin civil,
doc<!ento interno de ,-.(M, /niversidad $olit0cnica de Madrid, 99>.
[RO,R-G/E?-97] Rodr@g<eA, 6.F., Control y planificacin de sistemas multirrobot traba&ando en
tareas coordinadas, +esis ,octoral, ,-.(M, /niversidad $olit0cnica de Madrid, 997.
[.'ER-,(9-98]."eridan, +.)., !elerobotics, Automation and Human Supervisory Control, +"e M-+
$ress, 998.
[+ORR(L1(-98] +orralva, c., "9<eva clasi3icaci4n de la -FR para los robots", Automatizacin indus
trial y ' revista de robtica, *B, (bril 998.
. ,
"
Indice analtico
. _ . . --. ~
PJBB,221, 223,236,270
Accidentes,271
Accionamiento,
caractersticas, 26, 35
directo, 20, 24, 190
elctrico, 29, 160
!idr"#lico, 2$, 160
ne#m"tico, 26-2$
Aceleraci%n, 149,239
Acomodaci%n,230
Act#ador (vase Accionamiento&
Ada'tati(o, control, 204
Ade't )ec!nolo*+,25, 223, 270
Ad!esi(os, 299
A,- (vase Asociaci%n,s'a.ola de -o/%tica&
A012- (vase Asociaci%n 0rancesa de
1ormali3aci%n&
A0-4 (vase Asociaci%n 0rancesa de -o/%tica
4nd#strial&
A5,220,223
Al*oritmo,
6-7,97
5a*ran*e-,#ler, l35
1e8ton-,#ler, 14$
Alimentaci%nde m"9#inas,299
A:5,223
Amorti*#amiento,211
Am'li;icador,212
An"lisisecon%mico,
/ene;icios de e<'lotaci%n, 279
costes de e<'lotaci%n, 279
costes de in(ersi%n, 27$
descri'ci%n, 277
mtodos, 2$0
ro/ot, 255, 279
A15 (vase Ar*onne1ational 5a/orator+&
Anti-windup,215
A'licacionesind#striales,
alimentaci%n de m"9#inas, 299
a'licaci%n ad!esi(os, 299
clasi;icaci%n, 292
control de calidad, 307
corte, 302
;#ndici%n, 293
ins'ecci%n, 307
mani'#laci%n, 304, 305, 30$
mercado, 2$6
monta=e, 304
'aleti3aci%n, 305
'int#ra, 297
'rocesado, 301
salas /lancas, 30$
soldad#ra, 294
A'licacionesen n#e(os sectores,
constr#cci%n, 311, 314
medicina, 311, 313
n#clear, 311, 312
A'licacionesno ind#striales,7, 311
An*#lar, con;i*#raci%n, 1$, 109
An*#los,
,#ler, 57-60, $5-91,176,227
-P>, 59
?@?,5$,$6
?>?, 5$,$7
Area de tra/a=o, 263
Ar*onne1ationa15a/orator+AA15&, 5, 313
A-5A, 221, 22$
Artic#laci%n,
an*#lar, 9$
de;inici%n, 16,94
'ar"metros 6-7, 99
ti'os, 16
AB,A, 6, 221, 22$
Asimo(, 4saac, 4
Asociaci%n,
4nd#strias -o/%ticas A-4A&, 6, 9
0rancesa de 1ormali3aci%n AA012-&, 10
-o/%tica 4nd#strial de Ja'%n AJ4-A&, 6
-o/%tica de Amrica A-4A&, 6
-o/%tica de ,s'a.a AA,-&, 2$6
-o/%tica de 0rancia AA0-4&, 11
319
320 Fundamentos de robtica
Capacidadde carga, 268
Capek, Karel, 3
Caractersticas,
robot, 262, 269, 270
reductores, 22
actuadores, 35, 26
sistemas programacin, 225
Carga/descargade m!uinas, 299
Carnegie"#e$lon%ni&ersit', 3(2
Cartesiana,con)iguracin, (8
Casli Flow, 28(
C*lulade traba+o, 255, 256
Cilndrica,con)iguracin, (8
Cilindro,
neumtico, 26
,idrulico, 28
Cinemtica,
directa, 93, 9-"(08
in&ersa, 93, (08"(22
Cinemticadirecta,
cuaternios, (03
."/,96
$01 6-00C, (0(
robot cilndrico, (00
2C303,(03
Cinemticain&ersa,
desacoplo cinemtica, ((8
$012-00, ((8
matri4 ,omog*nea, ((2
m*todo geom*trico5 ((0
robot planar de 36.7, ((0
robot polar, ((2
Cincinatti#ilacron, 22(
Clasi)icacin,
aplicaciones, 292
lengua+es de programacin, 225
robots, ((, (-
sensores, 36
transmisiones, 20
Codi)icadoresde posicin, 37
Cdigo de 6ra', 38
Cdigo"0, 23(
Codo del robot, (((
Coe)icientede amortiguamiento,2((
Compensacin,
gra&edad, (98
prealimentacin, (97, 202
por par calculado, 20-
Compliant motions, 230
Composicinde rotaciones, 56
Comunicacin,lneas de, 228
Concurrente,2-(, 2-9
Con)iguracindel robot
angular, (8, (09
cartesiana, (8
cilndrica, (8, 99
codo aba+o, (((
codo arriba, (((
descripcin, 238
es)*rica, (8
polar, (8, (38, ((3
2C303, 7,(8,(03,(7-,23(
singular, (25,23(,239,2-6,263
tipos, (7
Construccin,3((, 3(-
Control,
adaptati&o, 20-
cinemtica, (69"(72
con compensacin de gra&edad, (98
con prealimentacin, (97,202
dinmico, (32, (87, 269
$"8.,2(5
monoarticular, (88
mo&imiento, 229
multiarticular, 200
8.,(98
8$., (9-, (97,202
por e9citacin, 30
por inducido, 30
por in&ersin del modelo, (9-,200
por par calculado, 20-
programa, 230
Control adaptati&o,
por modelo de re)erencia, 207
por par calculado, 208
por plani)icacin de ganancias, 205
Control de calidad, 307
3utmata,2
3utomati4acin,3
3%:;8322,223
Backslash, 22
1arrerasde proteccin, 27-
1ene)iciosde e9plotacin, 279
Brushiess, 32
ndice analtico 321
Conrrol numrico, 272
Coordenadas,
articulares, 227
cartesianas, 51,227
cilndricas, 52
esfricas, 52
homogneas, 62
polares, 51
sistemas de, 50
Coriolis
fuerzas/pares, 135
matriz, 137, 155
Corte,
chorro de agua, 302
lser, 302
Costes,
eplotaci!n, 27"
in#ersi!n, 27$
Cuaternios,
lge%ra, $2
aplicaci!n, $1, $5&"1, 103, 177, 227
definici!n, 61,$1
con'ugado, $1
in#erso, $2
norma, $2
rotaci!n, $3
C(clo,23
en el centro, 257
en lnea, 25$
m!#il, 25"
suspendido, 260
)inmica,
ecuaci!n, 137, 155,1$$,200
principios, 132
directa, 133
in#ersa, 133
)) (vase *ccionamiento directo+
)atos, tipos, 227
),*, 30$, 270
)efinici!n,
ro%ot industrial, "&11
ro%ot de ser#icio, 11, 311
ro%ot teleoperado,ll
)ena#it&-arten%erg, "3, "6
)ensidad de ro%ots, 2$6
)esacoplamiento, 200
)esacoplo cinemtico, 11$
)etector,
capaciti#o, .3
efecto -all, .3
inducti#o, .3
sincronismo, 3"
)e#ol, /eorge c., 5
)&-, "6, ""
)inmica del ro%ot, 131&135
)012,307,260,30"
)isposici!n del ro%ot,
,cuaci!n,
dinmica, 137, 155, 1$$,200
3agrange&,uler, 13.
4e5ton&,uler, 132, 133
,fecto&-all, .3
,fectores finales, ..
,'e de rotaci!n, 61,177
,'ecuci!n concurrente, 2.1, 2."
,'emplo de programaci!n, 231, 2.1, 2."
,lctrico, accionamiento, 2", 160
,lementos terminales, ..
,ncoder,
a%soluto, 3$
incremental, 37
,nerga,
cintica, 13.
potencial, 13.
,ngel%erger, 6787, 5
,ngrana'es, 20
,ntorno,
de programaci!n, 226
interacci!n,
modelado, 226
,ntradas/salidas, 22$
,rror, 1"5,203
,scalado, 63, 72
,sfrica, configuraci!n, 1$
,sla%!n, 16, ".
,spacio,
cartesiano, 50
estado, 155
tarea, 15"
tra%a'o, 15"
,stadsticas, 2$5
,uler, ngulos, 57&60,$5&"1, 176,227
,plotaci!n, 275 7
322 Fundamentos de robtica
Factor de reduccin, 188
F~C,297,306,310
Federacin Internacional de Robtica (IFR), 6, 10,
285,292
Filtro de mueca, 217
Fle!in, 216
Frecuencianatural, 211
Fuer"a,
centr#$u%a, 137, 155
contacto, 159
Corioli, 137, 155
%ra&itacional, 135
inercia, 135
Funcin,
'a%ran%iana, 13(
tran$erencia, 163,30
Fundicin,
a la cera )erdida, 29(
)or in*eccin, 293
+aiotto, 221
+,'(vase +rado de libertad)
+eneral-otor, 6, 293
+eom.trico,m.todo, 110
+oert", R/C/, 5
+rado de libertad, 17, 265
+r0$icode tran$ormacin,80
+R123,26(
+ra&edad,
aceleracin, 137
com)enacin, 198
$uer"a, 135, 137
matri" de $uer"a,
+2,205
Guarded motions, 230
+uiado,
acti&o, 221
b0ico, 222
)ai&o, 220
directo, 221
e!tendido, 222
mani4u5,221
+ra*, cdi%o, 38
6all, e$ecto, (3
6armonic7,ri&e,22
6erramienta, (6
6idr0ulico, accionamiento,
decri)cin, ((, 238
ti)o, (6
IFR (vase FederacinInternacionalde Robtica)
Im)lantacin,255
Inducto*n,(2
Inercia,
$uer"a, l35
matri", 136, 1(9, 155
In)eccin, 307
Intalacin, 275, 279
Intruccione,
Cdi%o7R,232
R13I,,2(0
89,2(7
Inter)olacin,
a tramo, 181
c:bica, 178
lineal, 178
tra*ectoria, 177
Interru)cin, 228, 2(5
In&erindel modelo, 19(,200
I73,,215
IR,1;1,220
I2<,10
=acobiana,
determinante, 125
in&era, 12(
matri", 122, 123, 159, 171
=acobiano, 125
=et 3ro)ulion'ab, 312, 31(
=IR1 (vase 1ociacinde Robtica de =a)n)
=3' (vase =et 3ro)ulion'aborator*)
=ue%o an%ular, 22
>en?ard, C/@/, 5
>rerrilin,(5,270, 298
>l=>1,258,259,275,301,303
'a%ran%e7Auler,
$ormulacin, 133
al%oritmo, 135
'a%ran%iana, 13(
'1-1,223
ndice analtico 323
Manipulacin,49, 304, 305, 308
Manipulador, 9, 10
Mantenimiento,279
Matriz,
bsica de rotacin, 56
centrpeta, 137, 155
oriolis, 137, 155
!actores de reduccin, 189
"ra#edad, 137, 155
$omo"%nea in#ersa, 76, 115
inercias, 136, 149, 155
&acobiana, 122'123, 159, 171
noa, 74,112,227
pseudoinercias, 136
re"uladores, 202
rotacin, 53 63, 148, 175
rozamiento #iscoso, 189
trans!ormacin, 95, 135
trans!ormacin $omo"%nea, 62,85'91,94
traslacin, 63, 64
Matriz $omo"%nea,
aplicacin, 64, 85,94, 112
composicin, 76
de!inicin, 63
in#ersa, 76
si"ni!icado, 74
Medicina, 311,313
Mercado de robots, 285
M%todo,
anlisis econmico, 280
perodo de recuperacin, 280, 281
()*, 280, 283
+,-, 280, 282
Modelo,
actuadores, 160
de re!erencia, 207
dinmico, 131, 155, 159, 169, 187
dinmico directo, 133
dinmico in#erso, 133
cinemtico, 93, 169
entorno, 226
motor ., 161, 193
motor $idrulico, 164
Monta/e, 304
Mor!olo"adel robot, 15
Mos$er, R., 5
M0(0M,-, 294, 296
Motor,
autopilotado, 30
brushless, 32
corriente alterna 1,2, 34
corriente continua 1.2, 29
$idrulico, 28, 164
modelo, 160, 164, 193
neumtico, 27
paletas, 27, 28
paso a paso, 32
pistones a3iales, 27, 28
Motor ,,
asncrono, 36
sncrono, 35
Motor.,
controlado por e3citacin, 30
controlado por inducido, 30, 161
modelo, 161,30
Lay-out, 225, 226
4en"ua/esde pro"ramacin
,4, 220, 223, 228
,M4, 223, 228
,*4,, 221, 228
,5(06,77,223
clasi!icacin, 225
e/emplo, 231, 241, 249
)*.,(,,220
4,M,, 223
4M,223
ni#el ob/eto, 224
ni#el robot, 223
ni#el tarea, 225
*,6)., 223, 228, 229, 236
*,6(,223
re8uerimientos, 225
(3,221
+9,223,228,230,246
+,4 11,223, 228, 230
4e: de control, 195, 197, 198,201,204
4e: de -e;ton, 132
4e:es de la robtica, 4
4neas de comunicacin,228
4M,223
4ocalizacinespacial,
comparacin, 85
descripcin, 50, 239
m%todos, 85
relacin entre m%todos, 86
4+.(,41
324 Fundamentos de robtica
Ordenador, 1
Orientacin,
ngulos de Euler, 57, 85, 176, 227
descripcin, 52
extremo, 239
RP,59
Oscilaciones, 216
Par,
calculado, 2!", 2!8
pertur#ador, 156, 189
rotacin, 61,177
P$,198
Per%odo de recuperacin, 28!, 281
Perspecti&a, 63, 72
P'$,
control, 19", 197,2!2,213
parmetros, 21!
Pick and place, 1",3!6
Pintura, 297
Pin(as, ""
Pin(as de soldadura, "6
Pistolas de pintura, "5
Pitch,59
Plani)icacin
ganancias, 2!5
tra*ectorias, 17!, 172, 177
Polar, con)iguracin, 18, 138, 113
Polinomio de interpolacin, 178
Posicin,
error, 195,2!3,266
extremo, 15!, 229, 266
Posicionamiento, 5!, 229, 266
Potencimetro, 137
Prealimentacin, 197,2!2
Precisin, 266
Programacin,
clasi)icacin, 225
e+emplo, 231, 2"1, 2"9
entorno, 226
guiado, 22!
ni&el o#+eto, 22"
ni&el ro#ot, 223
ni&el tarea, 225
re,uerimientos, 225
ro#ots, 219, 22!, 269
textual, 22!, 223
Protecciones, 27"
P-./, 27!, 313
Puntos de paso, 229
.o&imiento,
acomodaticio, 23!
articular, 17!
cartesiano, 17!
continuo, 173, 229
coordinado, 173,229
e+e a e+e, 173
isocrono, 173
protegido, 23!
punto a punto, 172, 229
simultneo, 173
tipos, 172
.R/0, 2!7
.uestreo, 18"
.u1eca del ro#ot, 118,238
2/3/,13
2e4ton5Euler,
)ormulacin, 132, 1"8
algoritmo, 1"8
2i&el programacin,
o#+eto, 22"
ro#ot, 223
tarea, 225
noa,7", 112, 127
2ormati&a,
americana, 277
espa1ola, 273, 277
europea, 273, 277
internacional, 276
seguridad, 273, 276
2ordson,
Notch-filter,
2uclear, aplicacin
Paleti(acin, 3!5
Parada de emergencia, 273
Parmetros $56, 96, 99
R/P'$,223,228,229,236
R/P7,223
Regulador,
anti-windup,215
'5P$,215
ndice analtico 325
PD,198
PID, 194, 197,202
REDEX-ACBAR,24
Reduccin, factor, 22
Reductor,
caractertica, 22
C!c"o,2#
definicin, 19,21
inf$uencia, 188
%AR&'(IC-DRI)E, 22
*atri+, 189
REDEX-ACBAR, 24
Redundante,ro,ot, 19,2--
Re$acinde reduccin, 22
Re$acionediferencia$e, 122
Re.eti,i$idad,2--
Reo$/er, #9
Reonanciaetructura$,212
RIA(vase Aociacinde IndutriaRo,tica0
R'BCAD,2-4
Ro,ot,
a.$icacione, 291,29#, #11
an1u$ar, 18, 109
caractertica, 2-2, 2-9, 270
carteiano, 18
ci$ndrico, 18, 99
cine*2tica, 9#
c$aificacin, 11, 14
codo, 111
confi1uracione, 17
definicin, 9-11
din2*ica, 1#1-1#3
di.oicin, 237
ef4rico, 18
indutria$, 9
*ercado, 283
*orfo$o1a, 13
.a$a,ra, #
.o$ar, 18, 11#, 1#8
.ro1ra*acin, 219, 220, 2-9
redundante, 19, 2--
5CARA, 7,18,10#,174,2#1
e1uridad, 271
e$eccin, 233, 2-2
er/icio, 11, #11
te$eo.erado, 11
Ro,tica,
$e!e, 4
definicin, 3
futuro, 7
or1ene, 3
Ro,ot,
ABB IRB1000,#03
ABB IRB2000, 299, #02
ABB IRB2400, 119,270
ABB IRB#200, 2-0
ABB IRB-000, 293
ABB IRB-400C, 101
ABB 6R3002, 270
Ade.t'ne, 23
Ade.t67ree, 23, 270, #07
A5EAIR,-,-
A5EA IR,-0, -, #09
DEA BRA)' 2203, 270
DEA BRA)' 2207, #08
DI5A&-E-3, 2#1
8A(9C ARC&ate 120:-12, 17,270
8A(9C ;-1000, 270
<aiotto RI:9#, 221
<aiotto RE:91, 221
=re*$in A=R #000, 270
=9=A =R123, 270
=9=A IR 7-1:123>0,#01
&'6'&A( 5=I---, 270
&'6'&A( 5-04, 270
R'CC',2-4
5ta?,$i P9&A 3-0C, 270
5ta?,$i RX90, 8, #0#
9(I&A6E 2000,-,#13
R'CC',2-4
Rol!, 39
Rou*@ 9ni/era$Ro,ot, #
Rotacin,
*atri+, 3#, -#, --, 188
.ar, -1,177
tranfor*acin, --
Ro+a*iento/icoo,
RPA, 39, 87
5a$a ,$anca, #08
5aturacin, 212
5CARA, 7,18,10#,174,2#1
5ta?,$i, 8, 270, #0#, #10
5e1uridad,
decri.cin, 271
*edida, 272
nor*ati/a, 27#, 27-
1
1
326 Fundamentos de robtica
Sensores,
capacitivos, 43,
comparacin, 40
efecto Hall, 43
encoder, 37, 38
externos, 36
inductivos, 43
Inductosyn, 42
interacin, 228, 22!
internos, 36
"#$%,41
no colocado, 21 6
pticos a&solutos, 38
pticos incrementales, 37
posicin, 37'42
potencimetro, 37
presencia, 43
rela ptica, 42
resolver, 3!
sincro'resolver, 3!
tipos, 36
velocidad, 42
visin, 36
Servov(lvula, 1 64
Simulacin,
ro&ots, 2)7, 264
fa&ricacin flexi&le, 2)7
Sincroni*ado,3!
Sinularidad,
definicin, 1 2), 1 26,23!,246,263
e+emplo, 1 28
evitacin, 1 2!,22!,23!,246
mu,eca, 23!, 246
Sistema,
cartesiano, )0
control, 261 , 268, 273
noa,74,1 1 2,227
referencia, )0
Soldadura,
arco, 2!6
puntos, 46, 2!)
Splines, 1 7!
Su+ecin, elementos,44
%-.-S, 264
%ransductores,36
%ransferenciade art/culosproramada, )
%ransformacin,
directa, !4
escalado, 63, n
fuer*a, 1 )!
r(fico, 80
0omo1nea, 62, 8)'!1 ,!4
inversa, 1 08
matri*, !), 1 3)
perspectiva, 63, n
%ransmisiones,
descripcin, 20
clasificacin, 20
%raslacin, 63, 64
%rayectoria,
articular, 1 70
cartesiana, 1 70
continua, 1 73, 22!
coordinada, 1 73,22!
e+e a e+e, 1 77
interpolacin, 1 77
isocrona, 1 73
muestreo, 1 84
planificacin, 1 7)
punto a punto, In, 229
2nimation, 6, 223
#+, 223, 228, 230, 246
#3"u, 223, 228, 230
#alor 3ctual 4eto 5#346, 280, 282
#aria&les de estado, 1 )6
#ector,
estado, 1 )6
posicin, )1
#elocidad, 22!, 23!, 267, 273
Va points, 229
#olumende tra&a+o, 263
7as8a9a, 222
Yaw, )!
%asa Internade la .enta 5%I.6, 280, 283
%elemanipulacin,), 31 3
%elemanipulador,)
%:";-%,2l
<=<,)8,86
<7<, )8,87
"Ale do desti let nadlaj Rossumovi Universln Roboti tolik
psenice, tolik ltek, tolik vseho, ze rekneme:
vci uz nemaj ceny. yn ber kazdy, kolik potrebujes.
en bdy. Ano, budou bez prce. Ale pak nebude uz vubec zdn prce.
!sechno udlaj ziv stroje. "lovk bude dlat jen to, co miluje.
#ucle zt jen proto, aby se zdokonaloval."
$"%ero dentro de diez a&os Robots Universales Rossum
producir tanto tri'o, tantos tejidos, tanto de todo,
(ue las cosas prcticamente carecern de valor.
"ada cual podr co'er lo (ue (uiera. o habr pobreza.
) habr desempleo, pero no habr empleo.
*odo lo harn m(uinas vivientes. *odo el mundo estar
libre de preocupaciones y del de'radante trabajo manual.
*odos vivirn solo para per+eccionarse.",
Domin, primer acto de "R. U.R"
Karel Capek
327
Вам также может понравиться
- Mandos Por Controladores Lógicos ProgramablesДокумент83 страницыMandos Por Controladores Lógicos ProgramablesJòse Ièdz100% (1)
- Automatización de Procesos IndustrialesДокумент43 страницыAutomatización de Procesos Industrialesjose guacaran100% (2)
- Analisis de Costo de Ciclo de Vida de Un ActivoДокумент8 страницAnalisis de Costo de Ciclo de Vida de Un ActivoEmilio Bernal ValenciaОценок пока нет
- Grafcet y GemmaДокумент90 страницGrafcet y GemmaJosé Manuel García Martín100% (1)
- Curso de GrafcetДокумент66 страницCurso de Grafcetvicasazn100% (2)
- Manual Programacion Simatic s7 300 PDFДокумент154 страницыManual Programacion Simatic s7 300 PDFtokio2424Оценок пока нет
- Mapeo de Procesos CSC 01Документ34 страницыMapeo de Procesos CSC 01Diego Duran Vigueras100% (1)
- Trabajo Final BorradorДокумент77 страницTrabajo Final BorradorGiovanna Sandoval IriarteОценок пока нет
- Principio 10 de ToyotaДокумент51 страницаPrincipio 10 de ToyotaDiego Duran ViguerasОценок пока нет
- Empresa LeanДокумент30 страницEmpresa LeanDiego Duran ViguerasОценок пока нет
- ISO 14000 ExpoДокумент16 страницISO 14000 ExpoDiego Duran ViguerasОценок пока нет
- Resumen de Videos de HidraúlicaДокумент6 страницResumen de Videos de HidraúlicaDiego Duran ViguerasОценок пока нет
- Cambio Rpido de Herramental SMEDДокумент14 страницCambio Rpido de Herramental SMEDDiego Duran ViguerasОценок пока нет
- Choque UnidimensionalДокумент8 страницChoque UnidimensionalDiego Duran Vigueras100% (1)
- Informe PLCДокумент9 страницInforme PLCJuan Hernandez MellizoОценок пока нет
- Introduccion A La AutomatizaciónДокумент28 страницIntroduccion A La AutomatizaciónLiliana Quintero MorenoОценок пока нет
- Magi Craft MeisterДокумент330 страницMagi Craft Meisterrafaelandres.guajardojaraОценок пока нет
- Leer Al 100Документ88 страницLeer Al 100Profr Pedro RamirezОценок пока нет
- Algoritmopara Sistemasde Automatizacinde Llenado Mezcladoy Envasadode LquidosДокумент5 страницAlgoritmopara Sistemasde Automatizacinde Llenado Mezcladoy Envasadode LquidosantonioherediaОценок пока нет
- Sistemas Electrot Cnicos y Autom TicosДокумент8 страницSistemas Electrot Cnicos y Autom TicosJuan Carlos SandomingoОценок пока нет
- Automatismos Electricos Neumaticos e Hidraulicos CAPACIDADDES Y INDICADORES de LOGROДокумент7 страницAutomatismos Electricos Neumaticos e Hidraulicos CAPACIDADDES Y INDICADORES de LOGROmarinesbebranОценок пока нет
- Informe 2Документ16 страницInforme 2Edgar Vidal Espinoza OrtegaОценок пока нет
- Exam (4), Test Tema 9Документ10 страницExam (4), Test Tema 9paulinoОценок пока нет
- Krauss Ballets MecanicosДокумент37 страницKrauss Ballets Mecanicosjose2046Оценок пока нет
- Konrad Zuse 1004 CocaДокумент82 страницыKonrad Zuse 1004 CocaAngely CocaОценок пока нет
- Guia Laboratorios de PLC LogoДокумент23 страницыGuia Laboratorios de PLC Logoluis garcesОценок пока нет
- Unidad Iv PDFДокумент9 страницUnidad Iv PDFPEPEELTORO100% (1)
- Simulación de ProgramaДокумент12 страницSimulación de ProgramaAlexander maestre torres100% (1)
- Automatizacion DefinicionesДокумент2 страницыAutomatizacion DefinicionesPunto ClasesОценок пока нет
- Tema 7Документ46 страницTema 7Juan Comesaña CabralОценок пока нет
- Sistemas AutomatizadosДокумент7 страницSistemas AutomatizadosAngelica Y DanielОценок пока нет
- Exposicion Unidad 2 PLCsДокумент21 страницаExposicion Unidad 2 PLCsMartin GomezОценок пока нет
- Separata 10 Automatización y Control de Procesos IndustrialesДокумент7 страницSeparata 10 Automatización y Control de Procesos IndustrialesJimmy Benites EspinozaОценок пока нет
- Tanque Hidrogr FicoДокумент93 страницыTanque Hidrogr FicoJois Matthew Portugal100% (1)
- Semana 13 TeoriaДокумент20 страницSemana 13 TeoriaLuis RodriguezОценок пока нет
- Practica PLCДокумент18 страницPractica PLCerickferrОценок пока нет
- Ele T Ins Ele Aut DCB CДокумент143 страницыEle T Ins Ele Aut DCB COriol PonsОценок пока нет