Вам также может понравиться
- Bi-Directional Fonvard-Flyback DC-DC Converter: IEEE PowerДокумент4 страницыBi-Directional Fonvard-Flyback DC-DC Converter: IEEE PowerRaveendhra IitrОценок пока нет
- A New Single Switch Buck-Boost Type DC-DC ConverterДокумент4 страницыA New Single Switch Buck-Boost Type DC-DC ConverterRaveendhra IitrОценок пока нет
- Telephone Directory: Telephone Exchange Indian Institute of Technology Roorkee ROORKEE - 247 667 June - 2017Документ72 страницыTelephone Directory: Telephone Exchange Indian Institute of Technology Roorkee ROORKEE - 247 667 June - 2017Raveendhra IitrОценок пока нет
- Design of A Single-Switch DC-DC Converter For PV-Battery Powered Pump SystemДокумент6 страницDesign of A Single-Switch DC-DC Converter For PV-Battery Powered Pump SystemRaveendhra IitrОценок пока нет
- High Power Topology: "AlbacomДокумент7 страницHigh Power Topology: "AlbacomRaveendhra IitrОценок пока нет
- High Performance DC-DC Converter For Wide Voltage Range OperationДокумент8 страницHigh Performance DC-DC Converter For Wide Voltage Range OperationRaveendhra IitrОценок пока нет
- Synthesis and Analysis of A Multiple-Input Parallel SC DC-DC ConverterДокумент4 страницыSynthesis and Analysis of A Multiple-Input Parallel SC DC-DC ConverterRaveendhra IitrОценок пока нет
- 0628-1 Course MinhCTaДокумент1 страница0628-1 Course MinhCTaRaveendhra IitrОценок пока нет
- Digital Two-Loop Controller Design For Fourth Order Split-Inductor ConverterДокумент6 страницDigital Two-Loop Controller Design For Fourth Order Split-Inductor ConverterRaveendhra IitrОценок пока нет
- Design of Robust Digital PID Controller For H-Bridge Soft-Switching Boost ConverterДокумент15 страницDesign of Robust Digital PID Controller For H-Bridge Soft-Switching Boost ConverterRaveendhra IitrОценок пока нет
- Two-Loop Voltage-Mode Control of Coupled Inductor Step-Down Buck ConverterДокумент9 страницTwo-Loop Voltage-Mode Control of Coupled Inductor Step-Down Buck ConverterRaveendhra IitrОценок пока нет
- Maximum Power Point Tracking of Coupled Interleaved Boost Converter Supplied SystemДокумент10 страницMaximum Power Point Tracking of Coupled Interleaved Boost Converter Supplied SystemRaveendhra IitrОценок пока нет
- Based Power Tracking For Nonlinear PV SourcesДокумент8 страницBased Power Tracking For Nonlinear PV SourcesRaveendhra IitrОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
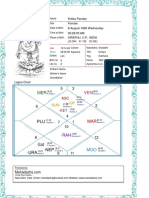
- Kritika Pandey (Kaushambi)Документ15 страницKritika Pandey (Kaushambi)nishink9Оценок пока нет
- Persepsi Masyarakat Terhadap Aplikasi Tiktok Sebagai Media Menurunkan Tingkat Stres Di Era Pandemi Covid-19Документ7 страницPersepsi Masyarakat Terhadap Aplikasi Tiktok Sebagai Media Menurunkan Tingkat Stres Di Era Pandemi Covid-19Syifa KhaerunnisaОценок пока нет
- Difficult Doctrine of The Love of GodДокумент93 страницыDifficult Doctrine of The Love of GodRocio Pireyek100% (8)
- Practical Research 1 Qualitative 2Документ112 страницPractical Research 1 Qualitative 2ZleCerboAtienza100% (3)
- Group 1 Nondigital Instructional MaterialsДокумент22 страницыGroup 1 Nondigital Instructional MaterialsJhon Paul Esplanada Soriano100% (1)
- Gerflor Card Taralay Impression Uni en - PDF - 348 - EnrichДокумент12 страницGerflor Card Taralay Impression Uni en - PDF - 348 - EnrichMartinОценок пока нет
- Breaking Into The Movies: Public Pedagogy and The Politics of FilmДокумент10 страницBreaking Into The Movies: Public Pedagogy and The Politics of FilmDouglasОценок пока нет
- L15 Conflict Management SДокумент18 страницL15 Conflict Management SjnfzОценок пока нет
- Impact Force CalculationДокумент3 страницыImpact Force CalculationphamvanlaiОценок пока нет
- Open Enrollment and Racial Segregation in The Twin Cities: 2000 - 2010Документ34 страницыOpen Enrollment and Racial Segregation in The Twin Cities: 2000 - 2010Minnesota Public RadioОценок пока нет
- MK2 ManualДокумент55 страницMK2 ManualJFrink333100% (1)
- Blake and MuttonДокумент4 страницыBlake and Muttonmohitegaurv870% (1)
- IPT and DepressionДокумент14 страницIPT and DepressionReanna WaughОценок пока нет
- EOI - City Without SlumДокумент38 страницEOI - City Without Slumikeh wanОценок пока нет
- Drawbacks of The Existing SystemДокумент7 страницDrawbacks of The Existing SystemSachin Mohite100% (1)
- Beekman - Tomorrow's Technology and You 9eДокумент89 страницBeekman - Tomorrow's Technology and You 9eJimmy DrakeОценок пока нет
- SUBIECTE - LICEU EnglezaДокумент34 страницыSUBIECTE - LICEU EnglezaElla Petrescu VasiiОценок пока нет
- Spss 1. Uji Normalitas Data: One-Sample Kolmogorov-Smirnov TestДокумент3 страницыSpss 1. Uji Normalitas Data: One-Sample Kolmogorov-Smirnov Testmustakim gmaОценок пока нет
- Cellular Respiration ExplanationДокумент2 страницыCellular Respiration Explanationvestermail50% (2)
- PIT Error Overview - ParetoДокумент208 страницPIT Error Overview - ParetoHariharan Yelomalei50% (2)
- East Sitra Housing Development: Schedule of ColumnДокумент1 страницаEast Sitra Housing Development: Schedule of ColumnKhaleelОценок пока нет
- ELECTROSTATICSДокумент21 страницаELECTROSTATICSHemanthОценок пока нет
- Autodesk Navisworks 2012 - Guia Do UsuárioДокумент820 страницAutodesk Navisworks 2012 - Guia Do UsuárioericfgОценок пока нет
- Belajar Bahasa Spanyol PDFДокумент5 страницBelajar Bahasa Spanyol PDFHimawan PrasojoОценок пока нет
- Communication Skills For Pharmacists UkratkoДокумент2 страницыCommunication Skills For Pharmacists UkratkoГоран МарковиќОценок пока нет
- IJCM Vol 23 Issue 8Документ83 страницыIJCM Vol 23 Issue 8Daniel PratamaОценок пока нет
- CV - Nhan - EnglishДокумент4 страницыCV - Nhan - EnglishnhanpcОценок пока нет
- Caillau, Guillon. S. Ephræm. Opera Omnia. 1832. Volume 7.Документ540 страницCaillau, Guillon. S. Ephræm. Opera Omnia. 1832. Volume 7.Patrologia Latina, Graeca et OrientalisОценок пока нет
- Water Treatment PDFДокумент87 страницWater Treatment PDFJubin KumarОценок пока нет
- Geotechnical Engineering - I: B.E. (Civil Engineering) Fourth Semester (C.B.S.)Документ2 страницыGeotechnical Engineering - I: B.E. (Civil Engineering) Fourth Semester (C.B.S.)Praveen KumarОценок пока нет