Вам также может понравиться
- Haptic Conceptual DesignДокумент23 страницыHaptic Conceptual DesignkinfeОценок пока нет
- From Indirect To Direct Force Control: A Roadmap For Enhanced Industrial RobotsДокумент36 страницFrom Indirect To Direct Force Control: A Roadmap For Enhanced Industrial RobotsLe Dinh PhongОценок пока нет
- Upper-Limb Prosthetics Control GuideДокумент22 страницыUpper-Limb Prosthetics Control GuideBapina Kumar RoutОценок пока нет
- Master-Slave Control of A Teleoperated Anthropomorphic Robotic Arm With Gripping Force SensingДокумент21 страницаMaster-Slave Control of A Teleoperated Anthropomorphic Robotic Arm With Gripping Force SensingSaurabh KorgaonkarОценок пока нет
- Integration For The Next Generation Embedding Force Control Into Industrial RobotsДокумент12 страницIntegration For The Next Generation Embedding Force Control Into Industrial RobotsGuilherme CostaОценок пока нет
- A Tutorial Survey and Comparison of Impedance Control On Robotic ManipulationДокумент36 страницA Tutorial Survey and Comparison of Impedance Control On Robotic Manipulationcekigad371Оценок пока нет
- A Force-Controllable Compact Actuator Module For A Wearable Hand ExoskeletonДокумент6 страницA Force-Controllable Compact Actuator Module For A Wearable Hand ExoskeletonKAREN DAYANA TRUJILLO BARRIOSОценок пока нет
- Power Grasping of A Prosthetic Hand Based Upon Virtual Spring-Damper HypothesisДокумент8 страницPower Grasping of A Prosthetic Hand Based Upon Virtual Spring-Damper Hypothesismarchicue2016Оценок пока нет
- Journal TMECH GROSSARDДокумент13 страницJournal TMECH GROSSARDGabriel Felippe PachecoОценок пока нет
- Sensors: Estimating Human Wrist Stiffness During A Tooling TaskДокумент14 страницSensors: Estimating Human Wrist Stiffness During A Tooling TaskAdi CrişanОценок пока нет
- A Paper Presentation By:: ST - Johns College of Engineering &technologyДокумент12 страницA Paper Presentation By:: ST - Johns College of Engineering &technologytanveermyxlncОценок пока нет
- How Can Human Motion Prediction Increase Transparency?Документ6 страницHow Can Human Motion Prediction Increase Transparency?jasposiris33Оценок пока нет
- Sensors: A Three-Axis Force Sensor For Dual Finger Haptic InterfacesДокумент19 страницSensors: A Three-Axis Force Sensor For Dual Finger Haptic InterfacesyumnaОценок пока нет
- 2003 - Shahram Payandeh - Towardnewdesignsofhapticdevicesforminimallyinvasiv (Retrieved 2018-09-07)Документ7 страниц2003 - Shahram Payandeh - Towardnewdesignsofhapticdevicesforminimallyinvasiv (Retrieved 2018-09-07)AmyОценок пока нет
- Muscle Sensor DocumentДокумент21 страницаMuscle Sensor Documentvidyadhar GОценок пока нет
- Novel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human IntentionДокумент22 страницыNovel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human IntentionAlemeОценок пока нет
- Exploring Human Arm Movements with Robot ExoskeletonДокумент6 страницExploring Human Arm Movements with Robot ExoskeletonIz CareyОценок пока нет
- Projection-Based Force Reflection Algorithm For Stable Bilateral Teleoperation Over NetworksДокумент6 страницProjection-Based Force Reflection Algorithm For Stable Bilateral Teleoperation Over Networkssamim_khОценок пока нет
- October 23, 2007 9:32 WSPC/191-IJHR 00114: Upper Limb Powered ExoskeletonДокумент20 страницOctober 23, 2007 9:32 WSPC/191-IJHR 00114: Upper Limb Powered ExoskeletonTest channelОценок пока нет
- Current Research in Robotics and Automation: An Intelligent Grasping SystemДокумент3 страницыCurrent Research in Robotics and Automation: An Intelligent Grasping SystemArun KumarОценок пока нет
- Do It Yourself Haptics, Part I: 2 Device OverviewДокумент21 страницаDo It Yourself Haptics, Part I: 2 Device OverviewfrhuttonОценок пока нет
- Haptic Technology: Paper Presentation ONДокумент14 страницHaptic Technology: Paper Presentation ONLeena John0% (1)
- A Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelДокумент11 страницA Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelMannanHarshaОценок пока нет
- 1985 Impedance Control An Approach To Manipulation Part II ImplementationДокумент9 страниц1985 Impedance Control An Approach To Manipulation Part II ImplementationAkbar HidayatullahОценок пока нет
- Book Chapter ElectrotactileДокумент40 страницBook Chapter Electrotactilerazankhalife4Оценок пока нет
- A Method For The Control of Multigrasp Myoelectric Prosthetic HandsДокумент10 страницA Method For The Control of Multigrasp Myoelectric Prosthetic HandsSahana RangarajanОценок пока нет
- Cars 2002 FriconneauДокумент6 страницCars 2002 FriconneauFares MentseurОценок пока нет
- Real-Time Behaviour Synthesis For Dynamic Hand-Manipulation: Vikash Kumar, Yuval Tassa, Tom Erez, Emanuel TodorovДокумент8 страницReal-Time Behaviour Synthesis For Dynamic Hand-Manipulation: Vikash Kumar, Yuval Tassa, Tom Erez, Emanuel TodorovAlioune Badara DioufОценок пока нет
- Analysis of Virtual Fixture Contact Stability For TelemanipulationДокумент8 страницAnalysis of Virtual Fixture Contact Stability For Telemanipulation89226905Оценок пока нет
- End Effector Force and Joint Torque Estimation of A 7 DoF Robotic Manipulator Using Deep Learning ProofreadingДокумент18 страницEnd Effector Force and Joint Torque Estimation of A 7 DoF Robotic Manipulator Using Deep Learning ProofreadingskruzicОценок пока нет
- Contact Control Concepts in Manipulation Robotics-An: Miomir andДокумент13 страницContact Control Concepts in Manipulation Robotics-An: Miomir andHaider NeamaОценок пока нет
- Adelstein 1996 Kinematic DesignДокумент8 страницAdelstein 1996 Kinematic DesignZanoe RachmadОценок пока нет
- Hierarchical Optimal Control of Redundant Biomechanical SystemsДокумент4 страницыHierarchical Optimal Control of Redundant Biomechanical SystemsNikhil AdhikariОценок пока нет
- MHI - Human Power Amp.1996Документ9 страницMHI - Human Power Amp.1996Nate AlexanderОценок пока нет
- Applied Sciences: Design of An Active and Passive Control System of Hand Exoskeleton For RehabilitationДокумент16 страницApplied Sciences: Design of An Active and Passive Control System of Hand Exoskeleton For RehabilitationKAREN DAYANA TRUJILLO BARRIOSОценок пока нет
- Haptic TechnologyДокумент8 страницHaptic TechnologySowjanya KosuruОценок пока нет
- 2023.peternel - Ajoudani.Teleimpedance A SurveyДокумент16 страниц2023.peternel - Ajoudani.Teleimpedance A SurveyAksheen MalhotraОценок пока нет
- Biomechatronic Hand: Guide: Prof. P.Dhotrad Seminar By: Sagar.S.KulkarniДокумент16 страницBiomechatronic Hand: Guide: Prof. P.Dhotrad Seminar By: Sagar.S.KulkarniGireesh BelavagiОценок пока нет
- 7 Degree-of-Freedom Upper-Limb Powered Exoskeleton DesignДокумент6 страниц7 Degree-of-Freedom Upper-Limb Powered Exoskeleton Designfaizar_2Оценок пока нет
- Stiffness-Force Feedback in UAV Tele-operationДокумент17 страницStiffness-Force Feedback in UAV Tele-operationedwardsilvaОценок пока нет
- Neuro MEMsДокумент15 страницNeuro MEMsDevika KishnanОценок пока нет
- Control of A Nonanthropomorphic Exoskeleton For Multi-Joint Assistance by Contact Force GenerationДокумент12 страницControl of A Nonanthropomorphic Exoskeleton For Multi-Joint Assistance by Contact Force GenerationRatna SambhavОценок пока нет
- Colgate 1993 RobustImpedanceShapingTelemanipulationДокумент11 страницColgate 1993 RobustImpedanceShapingTelemanipulationverdosОценок пока нет
- Tendon Transmission Efficiency of A Two-Finger Haptic Glove: Zhou MA, Pinhas Ben-TzviДокумент6 страницTendon Transmission Efficiency of A Two-Finger Haptic Glove: Zhou MA, Pinhas Ben-TzviDanny DurhamОценок пока нет
- 2020 BioRob ImpedanceДокумент8 страниц2020 BioRob ImpedanceRavi PrakashОценок пока нет
- 2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerДокумент6 страниц2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerANSHUMAAN P BHAGATОценок пока нет
- Force Control 2Документ25 страницForce Control 2dede sumantriОценок пока нет
- Biomechatronic Hand Provides Functional Substitution and Humanoid ApplicationsДокумент16 страницBiomechatronic Hand Provides Functional Substitution and Humanoid Applicationsjason barberОценок пока нет
- 2014 Hand-Held Microsurgical Forceps With Force-Feedback ForДокумент6 страниц2014 Hand-Held Microsurgical Forceps With Force-Feedback ForANSHUMAAN P BHAGATОценок пока нет
- Novel Postural Control Algorithm for Multifunctional Myoelectric Prosthetic HandsДокумент18 страницNovel Postural Control Algorithm for Multifunctional Myoelectric Prosthetic HandsJuan sebastian lopez escobarОценок пока нет
- Haptic Technology: Paper Presentation OnДокумент25 страницHaptic Technology: Paper Presentation OnBharadwaj SanthoshОценок пока нет
- Dynamic Modelling of The Compliant KUKA-DLR Lightweight RobotДокумент10 страницDynamic Modelling of The Compliant KUKA-DLR Lightweight RobotAntonis KatsikarelisОценок пока нет
- Human Machine Systems: 1999 John Wiley & Sons, IncДокумент14 страницHuman Machine Systems: 1999 John Wiley & Sons, IncAmbaejo96Оценок пока нет
- White Paper - Haptic DevicesДокумент4 страницыWhite Paper - Haptic Devicesliviu_scurtu4656Оценок пока нет
- Design and Implementation of A Robotic Hand Prosthesis Under The Tensegrity Approach For Transradial AmputeesДокумент6 страницDesign and Implementation of A Robotic Hand Prosthesis Under The Tensegrity Approach For Transradial AmputeesJORGE LUIS AROCA TRUJILLOОценок пока нет
- Mingl I 2004Документ6 страницMingl I 2004deepkumar donОценок пока нет
- JP - 13Upper-Limb Powered Exoskeleton DesignДокумент10 страницJP - 13Upper-Limb Powered Exoskeleton DesignCostinel BogheanuОценок пока нет
- Bio MechatonicsДокумент25 страницBio MechatonicsSatish HSОценок пока нет
- Castellini 2014Документ5 страницCastellini 2014Fernando PadillaОценок пока нет
- Atmel 8271 8 Bit AVR Microcontroller ATmega48A 48PA 88A 88PA 168A 168PA 328 328P - Datasheet - Complete PDFДокумент650 страницAtmel 8271 8 Bit AVR Microcontroller ATmega48A 48PA 88A 88PA 168A 168PA 328 328P - Datasheet - Complete PDFNext MillОценок пока нет
- (Ebook) +neumatica Hidraulica+y+Electricidad+AplicadaДокумент219 страниц(Ebook) +neumatica Hidraulica+y+Electricidad+Aplicadapcbyk_mroОценок пока нет
- LM85Документ27 страницLM85ranamantizОценок пока нет
- P 0044Документ43 страницыP 0044ranamantizОценок пока нет
- AVR151 Setup and Use of The SPIДокумент15 страницAVR151 Setup and Use of The SPIstepannpОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CIC Agile Case Study: European Embedded Technology Provider: A Grassroots Practitioner Driven Journey of Agile AdoptionДокумент7 страницCIC Agile Case Study: European Embedded Technology Provider: A Grassroots Practitioner Driven Journey of Agile AdoptionranamantizОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Metallic Foams II:: Properties and ApplicationsДокумент26 страницMetallic Foams II:: Properties and ApplicationsranamantizОценок пока нет
- No Software Will Be Installed or Removed.: Installation SummaryДокумент1 страницаNo Software Will Be Installed or Removed.: Installation SummaryranamantizОценок пока нет
- MotorДокумент23 страницыMotorraj_120581Оценок пока нет
- Security Through Hacking: Netcat TutorialДокумент10 страницSecurity Through Hacking: Netcat TutorialJairo TorresОценок пока нет
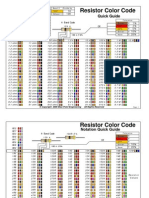
- Resistencias Codigo Colores PDFДокумент2 страницыResistencias Codigo Colores PDF'Cesar Guel81% (16)
- Timer 555 DatasheetДокумент11 страницTimer 555 DatasheetMissael Lavado MarquezОценок пока нет
- Advanced View Arduino Projects List - Use Arduino For ProjectsДокумент67 страницAdvanced View Arduino Projects List - Use Arduino For ProjectsBilal AfzalОценок пока нет
- Darren Ambrose - 30, 000BC Painting Animality: Deleuze & Prehistoric Painting (Angelaki Version)Документ18 страницDarren Ambrose - 30, 000BC Painting Animality: Deleuze & Prehistoric Painting (Angelaki Version)Darren AmbroseОценок пока нет
- Haptic Technology AbstractДокумент3 страницыHaptic Technology Abstractaniyoor50% (2)
- Coordinated and Force-Feedback Control of Hydraulic ExcavatorsДокумент9 страницCoordinated and Force-Feedback Control of Hydraulic ExcavatorsTewaney GedamuОценок пока нет
- Tactile Paper Prototyping With Blind Subjects: (Mei - Miao, Gerhard - Weber) @tu-Dresden - deДокумент10 страницTactile Paper Prototyping With Blind Subjects: (Mei - Miao, Gerhard - Weber) @tu-Dresden - denishukudi1Оценок пока нет
- Art in MotionДокумент231 страницаArt in MotionDedy IsmailОценок пока нет
- 60 - Vivek Thuravupala - Haptic Controlled MEMS SystemsДокумент31 страница60 - Vivek Thuravupala - Haptic Controlled MEMS SystemsVivek SureshОценок пока нет
- WIT13 June 2021 MSДокумент22 страницыWIT13 June 2021 MSaliОценок пока нет
- Virtual Reality & Interaction: Virtual Reality Input Devices Output Devices Augmented Reality ApplicationsДокумент21 страницаVirtual Reality & Interaction: Virtual Reality Input Devices Output Devices Augmented Reality ApplicationsDuy 6D Nguyễn Trần TháiОценок пока нет
- Nadim El Hindi - PortfolioДокумент63 страницыNadim El Hindi - PortfolioNadim El HindiОценок пока нет
- HAPTICДокумент20 страницHAPTICpiyushОценок пока нет
- GDPC XR FullresearchДокумент275 страницGDPC XR FullresearchupciztacalcoОценок пока нет
- Beyong 5g - Introduction To 6g-Rhode and SchwartzДокумент47 страницBeyong 5g - Introduction To 6g-Rhode and SchwartzSandeep KadamОценок пока нет
- Actas Urológicas Españolas: Robotic Surgery: History and Teaching ImpactДокумент6 страницActas Urológicas Españolas: Robotic Surgery: History and Teaching ImpactMohammed Wazeem NОценок пока нет
- Shash Haptic TechnologyДокумент24 страницыShash Haptic Technologyvasantha priyankaОценок пока нет
- Current and Future Trends of Media and InformationДокумент4 страницыCurrent and Future Trends of Media and Informationrhiantics_kram11Оценок пока нет
- Computer Games and Learning PDFДокумент73 страницыComputer Games and Learning PDFPrácticas FicaijОценок пока нет
- Virtual HandДокумент39 страницVirtual HandAdiVeneteОценок пока нет
- Feeling Your Data - Deborah LuptonДокумент16 страницFeeling Your Data - Deborah Luptonmattia paganelliОценок пока нет
- Kuka Brochure IiwaДокумент2 страницыKuka Brochure IiwaPrayogaBudhiОценок пока нет
- IEEE Base PaperДокумент6 страницIEEE Base PaperDeepti SharmaОценок пока нет
- Navigation Paragraph 1b PDFДокумент4 страницыNavigation Paragraph 1b PDFSafwan SadeqОценок пока нет
- Fow Seng Joe (B1757) - IM Assignment 2023 DualSense 5 Controller FunctionalityДокумент16 страницFow Seng Joe (B1757) - IM Assignment 2023 DualSense 5 Controller FunctionalityRobert Fow JOEОценок пока нет
- Haptic TechnologyДокумент14 страницHaptic TechnologyPraveen ShrivastavaОценок пока нет
- A Universal Remote Control With Haptic InterfaceДокумент6 страницA Universal Remote Control With Haptic Interfacesharmili_arvetiОценок пока нет
- MIL Module 10 MOOCДокумент24 страницыMIL Module 10 MOOCChrisell De la torreОценок пока нет
- L3harris t7 Robotic System Sell Sheet SasДокумент2 страницыL3harris t7 Robotic System Sell Sheet SastifonОценок пока нет
- Universal DesignДокумент26 страницUniversal DesignVeena SОценок пока нет
- Greg Campbell Resume 2 02 15Документ1 страницаGreg Campbell Resume 2 02 15api-282763411Оценок пока нет
- Evaluation Techniques and Universal DesignДокумент64 страницыEvaluation Techniques and Universal DesignEbisa EdessaОценок пока нет
- The Grid: The Fraying Wires Between Americans and Our Energy FutureОт EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureРейтинг: 3.5 из 5 звезд3.5/5 (48)
- Industrial Piping and Equipment Estimating ManualОт EverandIndustrial Piping and Equipment Estimating ManualРейтинг: 5 из 5 звезд5/5 (7)
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialОт EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialОценок пока нет
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyОт EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyОценок пока нет
- Asset Integrity Management for Offshore and Onshore StructuresОт EverandAsset Integrity Management for Offshore and Onshore StructuresОценок пока нет
- Handbook on Battery Energy Storage SystemОт EverandHandbook on Battery Energy Storage SystemРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentОт EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentРейтинг: 4.5 из 5 звезд4.5/5 (21)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successОт EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- Build Your Own Electric Vehicle, Third EditionОт EverandBuild Your Own Electric Vehicle, Third EditionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- The Rare Metals War: the dark side of clean energy and digital technologiesОт EverandThe Rare Metals War: the dark side of clean energy and digital technologiesРейтинг: 5 из 5 звезд5/5 (2)
- Transmission Pipeline Calculations and Simulations ManualОт EverandTransmission Pipeline Calculations and Simulations ManualРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Implementing an Integrated Management System (IMS): The strategic approachОт EverandImplementing an Integrated Management System (IMS): The strategic approachРейтинг: 5 из 5 звезд5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressОт EverandNuclear Energy in the 21st Century: World Nuclear University PressРейтинг: 4.5 из 5 звезд4.5/5 (3)
- ISO 50001: A strategic guide to establishing an energy management systemОт EverandISO 50001: A strategic guide to establishing an energy management systemОценок пока нет
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksОт EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksОценок пока нет
- Operational Amplifier Circuits: Analysis and DesignОт EverandOperational Amplifier Circuits: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeОт EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeРейтинг: 4 из 5 звезд4/5 (130)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AОт EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AРейтинг: 5 из 5 звезд5/5 (1)