Вам также может понравиться
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- Chapter 4Документ23 страницыChapter 4jeff_hammonds351Оценок пока нет
- CProsolsДокумент105 страницCProsolsK Nirmala AnantapurОценок пока нет
- Evaluation of FourierДокумент5 страницEvaluation of FourierVivek KumarОценок пока нет
- تحويلات فورير في الفيزياء PDFДокумент7 страницتحويلات فورير في الفيزياء PDFhammoud100% (1)
- Fourier Transform and Plancherel TheoremДокумент34 страницыFourier Transform and Plancherel Theoremgogo222Оценок пока нет
- Calculus of Variations: X X X X 0Документ7 страницCalculus of Variations: X X X X 0hammoudeh13Оценок пока нет
- F AnalysДокумент16 страницF Analysjcpa1000Оценок пока нет
- λ ax ∂ h hx ∂ α (log α) x ∂Документ2 страницыλ ax ∂ h hx ∂ α (log α) x ∂JFSPОценок пока нет
- Quadratic Mean Differentiability ExampleДокумент5 страницQuadratic Mean Differentiability ExamplemamurtazaОценок пока нет
- Week 3Документ20 страницWeek 3Venkat KarthikeyaОценок пока нет
- Optimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsДокумент10 страницOptimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsmaryОценок пока нет
- Harmonic Analysis Lecture2Документ12 страницHarmonic Analysis Lecture2marchelo_cheloОценок пока нет
- Unit 17: Taylor Approximation: Math 22AДокумент4 страницыUnit 17: Taylor Approximation: Math 22ATahzeeb AhmedОценок пока нет
- SequnceSeries of FunctionsДокумент50 страницSequnceSeries of FunctionsAlecsandra RusuОценок пока нет
- From Fourier Series To Fourier Integral: e X E, e eДокумент10 страницFrom Fourier Series To Fourier Integral: e X E, e evarun186Оценок пока нет
- m2k Opm Lapper1Документ8 страницm2k Opm Lapper1JoanzarzalОценок пока нет
- Contractions: 3.1 Metric SpacesДокумент10 страницContractions: 3.1 Metric SpacesDaniel Sastoque BuitragoОценок пока нет
- Higher Order Derivatives and Taylor Expansions: ExampleДокумент4 страницыHigher Order Derivatives and Taylor Expansions: ExampleNorazrizal Aswad Abdul RahmanОценок пока нет
- Ode Q&aДокумент12 страницOde Q&aJohnОценок пока нет
- Hanging ChainДокумент5 страницHanging ChainŞener KılıçОценок пока нет
- Chapter 1Документ68 страницChapter 1chinasingh123Оценок пока нет
- Lecture 14Документ4 страницыLecture 14mohinuddin12456Оценок пока нет
- Sol 5Документ4 страницыSol 5InstantRamenОценок пока нет
- Laplace TransformationsДокумент29 страницLaplace TransformationsParitosh ChaudharyОценок пока нет
- Gamma Distribution, - Distribution, Student T-Distribution, Fisher F - DistributionДокумент6 страницGamma Distribution, - Distribution, Student T-Distribution, Fisher F - DistributionrodgedogОценок пока нет
- The Mellin TransformДокумент6 страницThe Mellin TransformYashodhan KarkareОценок пока нет
- Calculus Criterion For ConcavityДокумент14 страницCalculus Criterion For ConcavityAbraham JyothimonОценок пока нет
- Green Functions For The Klein-Gordon Operator (v0.81)Документ4 страницыGreen Functions For The Klein-Gordon Operator (v0.81)unwantedОценок пока нет
- Laplace Transform and Differential EquationsДокумент138 страницLaplace Transform and Differential EquationsmymydestinyОценок пока нет
- Cobb DouglasДокумент14 страницCobb DouglasRob WolfeОценок пока нет
- Chapter 5Документ19 страницChapter 5chilledkarthikОценок пока нет
- Waveequation1 PDFДокумент27 страницWaveequation1 PDFAndrian RussuОценок пока нет
- Analysis Real Solutions 9Документ7 страницAnalysis Real Solutions 9Kartika NugraheniОценок пока нет
- Maths Hpas-2017 Main Paper Ii Q1Документ4 страницыMaths Hpas-2017 Main Paper Ii Q1sanjayb1976gmailcomОценок пока нет
- Maths Lecture Part 3 PDFДокумент36 страницMaths Lecture Part 3 PDFJtheMONKEYОценок пока нет
- Lectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Документ4 страницыLectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Saurabh TomarОценок пока нет
- Midterm Solutions 2013Документ12 страницMidterm Solutions 2013Nonitus OctingentiОценок пока нет
- Convolution TheoremДокумент16 страницConvolution TheoremMuhammad UmairОценок пока нет
- Function of Two Variables Notes - 2Документ45 страницFunction of Two Variables Notes - 2ap021Оценок пока нет
- Fourier Transform: 3.1 Definition and Basic PropertiesДокумент24 страницыFourier Transform: 3.1 Definition and Basic PropertiesbatporaОценок пока нет
- Partial Derivatives and Differentiability (Sect. 14.3) : RecallДокумент10 страницPartial Derivatives and Differentiability (Sect. 14.3) : RecallAlex TanОценок пока нет
- Using The Fourier Transform To Solve PdesДокумент4 страницыUsing The Fourier Transform To Solve PdesPeyton ShiОценок пока нет
- Fourier Transform: 1.1 The One-Dimensional CaseДокумент7 страницFourier Transform: 1.1 The One-Dimensional Casekr0465Оценок пока нет
- Integration 2 PDFДокумент12 страницIntegration 2 PDFabhinavОценок пока нет
- Learning Hessian Matrix PDFДокумент100 страницLearning Hessian Matrix PDFSirajus SalekinОценок пока нет
- 1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukДокумент36 страниц1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukRomain LiОценок пока нет
- Prelims Introductory Calculus 2012MTДокумент22 страницыPrelims Introductory Calculus 2012MTMaoseОценок пока нет
- Control TheoryДокумент45 страницControl TheoryGustavo SánchezОценок пока нет
- M2A1: Double Taylor Series & The Jacobian Matrix 1 Double Taylor SeriesДокумент2 страницыM2A1: Double Taylor Series & The Jacobian Matrix 1 Double Taylor SeriessompongtОценок пока нет
- TaylorДокумент5 страницTaylorpazrieОценок пока нет
- STA3000: Note On Transformation ModelsДокумент6 страницSTA3000: Note On Transformation ModelsPaul GokoolОценок пока нет
- Dirac Delta Impulse ResponseДокумент8 страницDirac Delta Impulse ResponselsunartОценок пока нет
- Green FunctionДокумент4 страницыGreen FunctionŠejla HadžićОценок пока нет
- Lecture14 Probset1.8Документ4 страницыLecture14 Probset1.8JRОценок пока нет
- Ade NPTL NotesДокумент207 страницAde NPTL NotesSaad MalikОценок пока нет
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОт EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОценок пока нет
- Functional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)От EverandFunctional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)Оценок пока нет
- Some NonsenseДокумент1 страницаSome NonsenseSnirPianoОценок пока нет
- We Wish You A Merry ChristmasДокумент2 страницыWe Wish You A Merry ChristmasCindy Quinn ToothmanОценок пока нет
- Problem Set 6Документ2 страницыProblem Set 6SnirPianoОценок пока нет
- Free Will Theorem John ConwayДокумент31 страницаFree Will Theorem John ConwayrichardcraibОценок пока нет
- Problem Set 5Документ2 страницыProblem Set 5SnirPianoОценок пока нет
- Problem Set 4Документ2 страницыProblem Set 4SnirPianoОценок пока нет
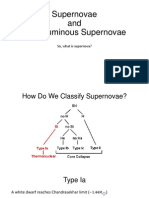
- Supernovae and Superluminous Supernovae: So, What Is Supernova?Документ16 страницSupernovae and Superluminous Supernovae: So, What Is Supernova?SnirPianoОценок пока нет
- My Chemical Romance - Helena LyricsДокумент2 страницыMy Chemical Romance - Helena LyricsSnirPianoОценок пока нет
- Pink - Just Give Me A Reason: Beginner Level 1DДокумент5 страницPink - Just Give Me A Reason: Beginner Level 1DSnirPianoОценок пока нет
- My Chemical Romance - Helena LyricsДокумент2 страницыMy Chemical Romance - Helena LyricsSnirPianoОценок пока нет
- Pink - Just Give Me A Reason: Beginner Level 1DДокумент5 страницPink - Just Give Me A Reason: Beginner Level 1DSnirPianoОценок пока нет
- Evidence For Water in The Rocky Debris of A Disrupted Extrasolar Minor PlanetДокумент17 страницEvidence For Water in The Rocky Debris of A Disrupted Extrasolar Minor PlanetSnirPianoОценок пока нет
- Say Something NotesДокумент1 страницаSay Something NotesbambumОценок пока нет
- ΠΕΝΤΑΓΡΑΜΜΟ PDFДокумент1 страницаΠΕΝΤΑΓΡΑΜΜΟ PDFtheo75Оценок пока нет
- (Free Com Alexandre Pappas Hy Folk S 40958Документ11 страниц(Free Com Alexandre Pappas Hy Folk S 40958SnirPianoОценок пока нет
- In Holland V Hodgson The ObjectДокумент5 страницIn Holland V Hodgson The ObjectSuvigya TripathiОценок пока нет
- S.I.M. InnovaДокумент51 страницаS.I.M. InnovaPauline Karen ConcepcionОценок пока нет
- SOCI 223 Traditional Ghanaian Social Institutions: Session 1 - Overview of The CourseДокумент11 страницSOCI 223 Traditional Ghanaian Social Institutions: Session 1 - Overview of The CourseMonicaОценок пока нет
- Infinitives or Gerunds PDFДокумент2 страницыInfinitives or Gerunds PDFRosa 06Оценок пока нет
- Logical Remarks On The Semantic Approach PDFДокумент34 страницыLogical Remarks On The Semantic Approach PDFFelipe SantosОценок пока нет
- MKTG How Analytics Can Drive Growth in Consumer Packaged Goods Trade PromotionsДокумент5 страницMKTG How Analytics Can Drive Growth in Consumer Packaged Goods Trade PromotionsCultura AnimiОценок пока нет
- The Interplay of Religion and PoliticsДокумент10 страницThe Interplay of Religion and PoliticsThompson mercyОценок пока нет
- mc96 97 01feb - PsДокумент182 страницыmc96 97 01feb - PsMohammed Rizwan AliОценок пока нет
- EchoДокумент11 страницEchoapi-394733232100% (3)
- Chapter 6 Coming of SpainДокумент4 страницыChapter 6 Coming of SpainJayvee MacapagalОценок пока нет
- Integrating Intuition and Analysis Edward Deming Once SaidДокумент2 страницыIntegrating Intuition and Analysis Edward Deming Once SaidRimsha Noor ChaudaryОценок пока нет
- BA BBA Law of Crimes II CRPC SEM IV - 11Документ6 страницBA BBA Law of Crimes II CRPC SEM IV - 11krish bhatia100% (1)
- 8 ActivityДокумент3 страницы8 ActivityNICOOR YOWWОценок пока нет
- Demo StatДокумент5 страницDemo StatCalventas Tualla Khaye JhayeОценок пока нет
- How To Access Proquest: Off-CampusДокумент9 страницHow To Access Proquest: Off-CampusZav D. NiroОценок пока нет
- Africanas Journal Volume 3 No. 2Документ102 страницыAfricanas Journal Volume 3 No. 2Gordon-Conwell Theological Seminary100% (2)
- HTMLДокумент115 страницHTMLBoppana yaswanthОценок пока нет
- Dwnload Full Western Civilization Beyond Boundaries 7th Edition Noble Solutions Manual PDFДокумент36 страницDwnload Full Western Civilization Beyond Boundaries 7th Edition Noble Solutions Manual PDFgramendezwv100% (8)
- Introduction, Case StudyДокумент56 страницIntroduction, Case StudyLeanna Cantanero67% (3)
- Richards and Wilson Creative TourismДокумент15 страницRichards and Wilson Creative Tourismgrichards1957Оценок пока нет
- PCA Power StatusДокумент10 страницPCA Power Statussanju_81Оценок пока нет
- Pro Angular JS (Apress)Документ1 страницаPro Angular JS (Apress)Dreamtech PressОценок пока нет
- 89 Robinson V MirallesДокумент1 страница89 Robinson V MirallesMartin AlfonsoОценок пока нет
- Comparative Analysis Betwee Fast Restaurats & Five Star Hotels RestaurantsДокумент54 страницыComparative Analysis Betwee Fast Restaurats & Five Star Hotels RestaurantsAman RajputОценок пока нет
- Elc650 Ws Guidelines (250219)Документ3 страницыElc650 Ws Guidelines (250219)panda_yien100% (1)
- Birnbaum - 2006 Registration SummaryДокумент14 страницBirnbaum - 2006 Registration SummaryEnvironmental Evaluators Network100% (1)
- 2011 Physics B Form B Scoring GuidelinesДокумент16 страниц2011 Physics B Form B Scoring GuidelinesMichael CОценок пока нет
- Schedule Risk AnalysisДокумент14 страницSchedule Risk AnalysisPatricio Alejandro Vargas FuenzalidaОценок пока нет
- HotsДокумент74 страницыHotsgecko195Оценок пока нет
- The Court of Heaven 1Документ2 страницыThe Court of Heaven 1Rhoda Collins100% (7)