Вам также может понравиться
- A Summary of NASA and USAF Hypergolic Propellant Related Spills and FiresДокумент112 страницA Summary of NASA and USAF Hypergolic Propellant Related Spills and Fires이응우Оценок пока нет
- NASA Feasibility of Electrified PropulsionДокумент100 страницNASA Feasibility of Electrified Propulsionmcdllv levozz lmdnapОценок пока нет
- Development of Gear Technology and Theory of Gearing by LitvinДокумент120 страницDevelopment of Gear Technology and Theory of Gearing by LitvinSelvaraji MuthuОценок пока нет
- Sealing in TurbomachineryДокумент62 страницыSealing in Turbomachineryjparmar100% (1)
- Fire, Explosion, Compatibility and Safety Hazards of Hydrogen PeroxideДокумент300 страницFire, Explosion, Compatibility and Safety Hazards of Hydrogen PeroxidesdjkfhkjhОценок пока нет
- Digital Booklet - Bach ConcertosДокумент14 страницDigital Booklet - Bach Concertosppopgod33% (3)
- Nasa TM 2006 214346Документ50 страницNasa TM 2006 214346kilcoo316Оценок пока нет
- Gear and Bearing Fatigue DamageДокумент18 страницGear and Bearing Fatigue DamagemkpqОценок пока нет
- Direct Gear DesignДокумент7 страницDirect Gear DesignFranco Angelo RegenciaОценок пока нет
- Assessing Potential Propulsion BreakthroughsДокумент30 страницAssessing Potential Propulsion BreakthroughshenrykeplerОценок пока нет
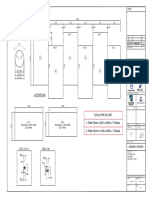
- Quezon City Department of The Building OfficialДокумент2 страницыQuezon City Department of The Building OfficialBrightNotes86% (7)
- Aeroelasticity Handbook 2 PDFДокумент596 страницAeroelasticity Handbook 2 PDFalexealmeidaОценок пока нет
- NASA Aeroelasticity Handbook Volume 2 - Design Guides Part 2 PDFДокумент596 страницNASA Aeroelasticity Handbook Volume 2 - Design Guides Part 2 PDFBrunno VasquesОценок пока нет
- Tooth Fillet Profile Optimization For Gears With Symmetric and AsymmetricДокумент11 страницTooth Fillet Profile Optimization For Gears With Symmetric and Asymmetricjr-parshanthОценок пока нет
- Abra Valley College Vs AquinoДокумент1 страницаAbra Valley College Vs AquinoJoshua Cu SoonОценок пока нет
- Business Case - Uganda Maize Export To South SudanДокумент44 страницыBusiness Case - Uganda Maize Export To South SudanInfiniteKnowledge33% (3)
- Overhead Door Closers and Hardware GuideДокумент2 страницыOverhead Door Closers and Hardware GuideAndrea Joyce AngelesОценок пока нет
- NASA TPm2000 - 207428Документ366 страницNASA TPm2000 - 207428Oriol PonsОценок пока нет
- Welding MapДокумент5 страницWelding MapDjuangОценок пока нет
- Trinath Chigurupati, A095 576 649 (BIA Oct. 26, 2011)Документ13 страницTrinath Chigurupati, A095 576 649 (BIA Oct. 26, 2011)Immigrant & Refugee Appellate Center, LLCОценок пока нет
- A Comparative Propulsion System Analysis For The High-Speed Civil TransportДокумент106 страницA Comparative Propulsion System Analysis For The High-Speed Civil TransportTapan KhandelwalОценок пока нет
- Nasa Axial 35 CFDДокумент19 страницNasa Axial 35 CFDmick.pride81Оценок пока нет
- 20120001785Документ54 страницы20120001785NinadОценок пока нет
- ReportДокумент18 страницReportShyam KumarОценок пока нет
- Polymethylmethacrylate (PMMA) Material Test Results For The Capillary Flow Experiments (CFE)Документ23 страницыPolymethylmethacrylate (PMMA) Material Test Results For The Capillary Flow Experiments (CFE)Naruto UzumakiОценок пока нет
- TURBOMAT: A Probabilistic Turbomachinery Aeroelastic Analysis ToolДокумент42 страницыTURBOMAT: A Probabilistic Turbomachinery Aeroelastic Analysis Toolcerden1998Оценок пока нет
- A Theoretical Investigation of Composite Overwrapped Pressure Vessel (COPV) Mechanics Applied To NASA Full Scale TestsДокумент28 страницA Theoretical Investigation of Composite Overwrapped Pressure Vessel (COPV) Mechanics Applied To NASA Full Scale TestsYohannes RegassaОценок пока нет
- TM 2001 210766Документ13 страницTM 2001 210766Shah TufailОценок пока нет
- 行星齿轮箱振动诊断Planetary Gearbox Fault Detection Using Vibration Separation TechniquesДокумент21 страница行星齿轮箱振动诊断Planetary Gearbox Fault Detection Using Vibration Separation TechniquesPeak NeoОценок пока нет
- Dynamic Open-Rotor Composite Shield Impact Test Report: NASA/TM-2015-218811 DOT/FAA/TC-15/22Документ68 страницDynamic Open-Rotor Composite Shield Impact Test Report: NASA/TM-2015-218811 DOT/FAA/TC-15/22saydamОценок пока нет
- Application of NiTi in Jet EngineДокумент17 страницApplication of NiTi in Jet Engineswaminathan G.Оценок пока нет
- AD1043317Документ22 страницыAD1043317Thakur B PОценок пока нет
- The GE-NASA RTA Hyperburner Design and DevelopmentДокумент22 страницыThe GE-NASA RTA Hyperburner Design and DevelopmentSadewo YaktiОценок пока нет
- Status of Turbulence Modeling For Hypersonic Propu PDFДокумент35 страницStatus of Turbulence Modeling For Hypersonic Propu PDFHRITAM NATHОценок пока нет
- Investigation of Exoskeletal Engine Propulsion System ConceptДокумент93 страницыInvestigation of Exoskeletal Engine Propulsion System ConceptMir yahyaОценок пока нет
- Passive Endwall Treatments For Enhancing Stability PDFДокумент78 страницPassive Endwall Treatments For Enhancing Stability PDFSơn HustmanОценок пока нет
- The Role of Radial Clearance On The Performance of Foil Air BearingsДокумент19 страницThe Role of Radial Clearance On The Performance of Foil Air BearingswataruОценок пока нет
- REview of CFD Methods NASAДокумент28 страницREview of CFD Methods NASAaliОценок пока нет
- Gear Fault Detection Effectiveness As Applied To Tooth Surface Pitting Fatigue DamageДокумент29 страницGear Fault Detection Effectiveness As Applied To Tooth Surface Pitting Fatigue Damagejr-parshanthОценок пока нет
- Gear Tooth Wear Detection Algorithm: NASA/TM-2015-218830Документ20 страницGear Tooth Wear Detection Algorithm: NASA/TM-2015-218830Huseyin CakmakОценок пока нет
- Ignitor Lox Methane-2.PDF Very GoodДокумент28 страницIgnitor Lox Methane-2.PDF Very GoodGirish UtageОценок пока нет
- Predicting Unreinforced Fabric Mechanical N210023708Документ26 страницPredicting Unreinforced Fabric Mechanical N210023708skr2010Оценок пока нет
- Nasa CC3Документ332 страницыNasa CC3esra kadriye akgülОценок пока нет
- NASA GlennICE ModelДокумент26 страницNASA GlennICE Modelecitimo raqinОценок пока нет
- NASA Glenn Research on Propulsion Controls and DiagnosticsДокумент32 страницыNASA Glenn Research on Propulsion Controls and DiagnosticsMahesh KumbharОценок пока нет
- NASA PowerДокумент24 страницыNASA PowerPrathune KailashОценок пока нет
- LINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler SolverДокумент42 страницыLINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler Solvercerden1998Оценок пока нет
- Three-Dimensional Gear Crack Propagation Studies: NASA/TM-1998-208827 ARL-TR-1833Документ15 страницThree-Dimensional Gear Crack Propagation Studies: NASA/TM-1998-208827 ARL-TR-1833jr-parshanthОценок пока нет
- NASA Experimental Results for Active Combustion Control of an Advanced Low-Emissions Aircraft Engine CombustorДокумент25 страницNASA Experimental Results for Active Combustion Control of an Advanced Low-Emissions Aircraft Engine CombustorLuca BozziОценок пока нет
- Ada357646 PDFДокумент12 страницAda357646 PDFfaisal jawadОценок пока нет
- Modeling Aircraft Wing Loads From Flight Data Using Neural NetworksДокумент20 страницModeling Aircraft Wing Loads From Flight Data Using Neural NetworksPrasath PandianОценок пока нет
- A Study of Highly Underexpanded Supersonic Jets N210024918Документ20 страницA Study of Highly Underexpanded Supersonic Jets N210024918skr2010Оценок пока нет
- Air Foil Bearing Papers PDFДокумент22 страницыAir Foil Bearing Papers PDFAruna Kumar SОценок пока нет
- Component-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisДокумент37 страницComponent-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisasmonovОценок пока нет
- Simulating The Use of Alternative Fuels in A Turbofan EngineДокумент20 страницSimulating The Use of Alternative Fuels in A Turbofan EngineMarcelo Roberti Rocha FantaguzziОценок пока нет
- A Model To Assess The Risk of Ice Accretion Due ToДокумент1 666 страницA Model To Assess The Risk of Ice Accretion Due ToTudorache BogdanОценок пока нет
- Evaluation of The Oxygen Concentrator Prototypes: Pressure Swing Adsorption Prototype and Electrochemical PrototypeДокумент42 страницыEvaluation of The Oxygen Concentrator Prototypes: Pressure Swing Adsorption Prototype and Electrochemical PrototypeAla Ibrahim JalladОценок пока нет
- Fan FlutterДокумент13 страницFan FlutterJaiganesh SelvarajОценок пока нет
- Workshop Report On Green AviationДокумент54 страницыWorkshop Report On Green AviationMarcus Skookumchuck VanniniОценок пока нет
- NASA Research Determines Rolling-Element Bearing Fatigue Life Prediction MethodДокумент28 страницNASA Research Determines Rolling-Element Bearing Fatigue Life Prediction MethodItalo Esquivel VeraОценок пока нет
- Revolutionary Propulsion Systems For 21st Century (Sehra Arun K., Shin J.)Документ13 страницRevolutionary Propulsion Systems For 21st Century (Sehra Arun K., Shin J.)tahir sadikovicОценок пока нет
- Intelligent Engine Systems: Adaptive ControlДокумент85 страницIntelligent Engine Systems: Adaptive ControlLee JamesОценок пока нет
- ACT Payload Shroud Structural Concept Analysis and OptimizationДокумент21 страницаACT Payload Shroud Structural Concept Analysis and OptimizationGani PateelОценок пока нет
- Full TextДокумент16 страницFull TextakttripathiОценок пока нет
- Recalibrated Equations For Determining Effect of Oil Filtration On Rolling Bearing LifeДокумент32 страницыRecalibrated Equations For Determining Effect of Oil Filtration On Rolling Bearing LifeSteve OoiОценок пока нет
- Need El Man 2014Документ32 страницыNeed El Man 2014Steve OoiОценок пока нет
- Onboard Inert Gas Generation System/ Onboard Oxygen Gas Generation System (Obiggs/Obogs) StudyДокумент180 страницOnboard Inert Gas Generation System/ Onboard Oxygen Gas Generation System (Obiggs/Obogs) StudySatyabrat GaanОценок пока нет
- Consideration of Moving Tooth Load in Gear Crack Propagation PredictionsДокумент14 страницConsideration of Moving Tooth Load in Gear Crack Propagation Predictionsjr-parshanthОценок пока нет
- 20090042820Документ27 страниц20090042820kritika chaudharyОценок пока нет
- Traction Control Andrew and RobДокумент18 страницTraction Control Andrew and Robjr-parshanthОценок пока нет
- Direct Gear Design® For Automotive ApplicationsДокумент9 страницDirect Gear Design® For Automotive Applicationsjohn16rdОценок пока нет
- FEM ANSYS Workbench 3d ModelingДокумент18 страницFEM ANSYS Workbench 3d ModelingbrrawalОценок пока нет
- Technical JournalsДокумент5 страницTechnical Journalsjr-parshanthОценок пока нет
- FiillДокумент8 страницFiilljr-parshanthОценок пока нет
- Static and Dynamic Analysis of HCR Spur Gear Drive UsingДокумент54 страницыStatic and Dynamic Analysis of HCR Spur Gear Drive Usingjr-parshanthОценок пока нет
- This Is About ABSДокумент1 страницаThis Is About ABSjr-parshanthОценок пока нет
- Advanced Thermoelectric Materials 1Документ2 страницыAdvanced Thermoelectric Materials 1jr-parshanthОценок пока нет
- Philip Crosby, 75, Developer of The Zero-Defects Concept - New York TimesДокумент1 страницаPhilip Crosby, 75, Developer of The Zero-Defects Concept - New York Timesjr-parshanthОценок пока нет
- ElsevierДокумент28 страницElsevierjr-parshanthОценок пока нет
- Finite Element Modeling and Simulation On The Quenching Effect ForДокумент96 страницFinite Element Modeling and Simulation On The Quenching Effect Forjr-parshanthОценок пока нет
- Advanced ApproachДокумент10 страницAdvanced Approachjr-parshanth100% (1)
- Antibraking SystemДокумент6 страницAntibraking Systemjr-parshanthОценок пока нет
- Nasa/Tm-1998 207419Документ13 страницNasa/Tm-1998 207419jr-parshanthОценок пока нет
- GearologyДокумент132 страницыGearologyRyley McCarthyОценок пока нет
- Nasa/Tm-2007 215032Документ23 страницыNasa/Tm-2007 215032jr-parshanthОценок пока нет
- Computer Aided Design of Spur Gear by Medwell JournalДокумент5 страницComputer Aided Design of Spur Gear by Medwell Journaljr-parshanthОценок пока нет
- Gear Fault Detection Effectiveness As Applied To Tooth Surface Pitting Fatigue DamageДокумент29 страницGear Fault Detection Effectiveness As Applied To Tooth Surface Pitting Fatigue Damagejr-parshanthОценок пока нет
- Nasa/Tm-2007 214970Документ16 страницNasa/Tm-2007 214970jr-parshanthОценок пока нет
- Report Documentation PageДокумент1 страницаReport Documentation Pagejr-parshanthОценок пока нет
- Nasa/Tm-2007 214914Документ14 страницNasa/Tm-2007 214914jr-parshanth100% (1)
- Nasa/Tm-2005 213958Документ188 страницNasa/Tm-2005 213958jr-parshanthОценок пока нет
- Nasa/Tm-2003 212463Документ14 страницNasa/Tm-2003 212463jr-parshanthОценок пока нет
- Consideration of Moving Tooth Load in Gear Crack Propagation PredictionsДокумент14 страницConsideration of Moving Tooth Load in Gear Crack Propagation Predictionsjr-parshanthОценок пока нет
- Three-Dimensional Gear Crack Propagation Studies: NASA/TM-1998-208827 ARL-TR-1833Документ15 страницThree-Dimensional Gear Crack Propagation Studies: NASA/TM-1998-208827 ARL-TR-1833jr-parshanthОценок пока нет
- Full-Text PDF Available Upon Request From Select Order InformationДокумент1 страницаFull-Text PDF Available Upon Request From Select Order Informationjr-parshanthОценок пока нет
- 2006-07 (Supercupa) AC Milan-FC SevillaДокумент24 страницы2006-07 (Supercupa) AC Milan-FC SevillavasiliscОценок пока нет
- Short Term Training Curriculum Handbook: General Duty AssistantДокумент49 страницShort Term Training Curriculum Handbook: General Duty AssistantASHISH BARAWALОценок пока нет
- Ayushman BharatДокумент20 страницAyushman BharatPRAGATI RAIОценок пока нет
- Internship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Документ59 страницInternship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Mohammad Shafaet JamilОценок пока нет
- Legal Techniques (2nd Set)Документ152 страницыLegal Techniques (2nd Set)Karl Marxcuz ReyesОценок пока нет
- Berry B Brey Part IДокумент49 страницBerry B Brey Part Ikalpesh_chandakОценок пока нет
- Bancassurance Black Book Rahul 777-2Документ62 страницыBancassurance Black Book Rahul 777-2Shubham ShahОценок пока нет
- Circular 09/2014 (ISM) : SubjectДокумент7 страницCircular 09/2014 (ISM) : SubjectDenise AhrendОценок пока нет
- Mini Ice Plant Design GuideДокумент4 страницыMini Ice Plant Design GuideDidy RobotIncorporatedОценок пока нет
- DrugДокумент2 страницыDrugSaleha YounusОценок пока нет
- Customer Satisfaction and Brand Loyalty in Big BasketДокумент73 страницыCustomer Satisfaction and Brand Loyalty in Big BasketUpadhayayAnkurОценок пока нет
- Organisation Study Report On Star PVC PipesДокумент16 страницOrganisation Study Report On Star PVC PipesViswa Keerthi100% (1)
- Introduction To Elective DesignДокумент30 страницIntroduction To Elective Designabdullah 3mar abou reashaОценок пока нет
- Khadi Natural Company ProfileДокумент18 страницKhadi Natural Company ProfileKleiton FontesОценок пока нет
- Applicants at Huye Campus SiteДокумент4 страницыApplicants at Huye Campus SiteHIRWA Cyuzuzo CedricОценок пока нет
- Super Flexible, Super Fast, Super Value: Gigabit PTMP Client and PTP With Modular AntennasДокумент5 страницSuper Flexible, Super Fast, Super Value: Gigabit PTMP Client and PTP With Modular AntennasAbdallaОценок пока нет
- HI - 93703 Manual TurbidimetroДокумент13 страницHI - 93703 Manual Turbidimetrojesica31Оценок пока нет
- SDNY - Girl Scouts V Boy Scouts ComplaintДокумент50 страницSDNY - Girl Scouts V Boy Scouts Complaintjan.wolfe5356Оценок пока нет
- 158 Oesmer Vs Paraisa DevДокумент1 страница158 Oesmer Vs Paraisa DevRobelle Rizon100% (1)
- Bentone 30 Msds (Eu-Be)Документ6 страницBentone 30 Msds (Eu-Be)Amir Ososs0% (1)
- B3 Zoning Diagram, Atlantic Yards/Pacific ParkДокумент4 страницыB3 Zoning Diagram, Atlantic Yards/Pacific ParkNorman OderОценок пока нет
- Difference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsДокумент2 страницыDifference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDharma Teja TanetiОценок пока нет
- ATOMIC GAMING Technical Tutorial 1 - Drawing Game Statistics From Diversity Multigame StatisticsДокумент4 страницыATOMIC GAMING Technical Tutorial 1 - Drawing Game Statistics From Diversity Multigame StatisticsmiltoncgОценок пока нет