Вам также может понравиться
- Baby Shower SamuelДокумент1 страницаBaby Shower SamuelCarlos MoraОценок пока нет
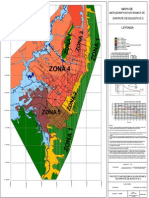
- Mapa Microzonifica SismicaДокумент1 страницаMapa Microzonifica SismicaLeonardo AlbornozОценок пока нет
- Motor PasoДокумент3 страницыMotor PasoCarlos MoraОценок пока нет
- ApmuДокумент11 страницApmuCarlos MoraОценок пока нет
- AcfiДокумент1 страницаAcfiCarlos MoraОценок пока нет
- Ergonomia 2Документ6 страницErgonomia 2Carlos MoraОценок пока нет
- Adoquines EcologicosДокумент10 страницAdoquines EcologicosCarlos MoraОценок пока нет
- Programa Elet 2Документ2 страницыPrograma Elet 2Carlos MoraОценок пока нет
- Tecnologias de La Información PresentaciónДокумент24 страницыTecnologias de La Información PresentaciónCarlos MoraОценок пока нет
- Protocolo Técnico Práctica Prototipado RápidoДокумент16 страницProtocolo Técnico Práctica Prototipado RápidoCarlos MoraОценок пока нет
- Cátedras 15-17 de MarzoДокумент11 страницCátedras 15-17 de MarzoCarlos MoraОценок пока нет
- Primera Practica TYTRДокумент1 страницаPrimera Practica TYTRCarlos MoraОценок пока нет
- HIDROGENOДокумент11 страницHIDROGENOCarlos MoraОценок пока нет
- Movimientos de La TierraДокумент3 страницыMovimientos de La TierraCarlos MoraОценок пока нет
- Carga Electrica PDFДокумент4 страницыCarga Electrica PDFLuigy CcaОценок пока нет
- D - Guia de Laboratorio ExtrusionДокумент12 страницD - Guia de Laboratorio ExtrusionCarlos MoraОценок пока нет
- Practica 1 MicroscpioДокумент11 страницPractica 1 MicroscpioCarlos MoraОценок пока нет
- Analisis GraficoДокумент5 страницAnalisis GraficoCarlos MoraОценок пока нет
- pREV. RIESGOSДокумент1 страницаpREV. RIESGOSCarlos MoraОценок пока нет
- Cap - 1 - 2 - 3 (Fuerzas y Cargas Electricas)Документ60 страницCap - 1 - 2 - 3 (Fuerzas y Cargas Electricas)Cristian PaccotОценок пока нет
- Sesión 8-1Документ25 страницSesión 8-1Lennon CQОценок пока нет
- Ex1020-Práctica1-Movilidad de MecanismosДокумент10 страницEx1020-Práctica1-Movilidad de MecanismosDavid Soler OrtizОценок пока нет
- Aryabhata EsДокумент1 страницаAryabhata EsNESTOR VASTAОценок пока нет
- Primera Práctica Cálculo III UtesaДокумент4 страницыPrimera Práctica Cálculo III UtesaXavier MejiaОценок пока нет
- TALLER 2 DE ESTADÍSTICA I (Industrial G2)Документ1 страницаTALLER 2 DE ESTADÍSTICA I (Industrial G2)Francisco Javier100% (1)
- Medida de DispersiónДокумент3 страницыMedida de DispersiónJaroll RodríguezОценок пока нет
- 1.introducción A La RobóticaДокумент28 страниц1.introducción A La RobóticaMery VargasОценок пока нет
- Problema de Cargo FijoДокумент6 страницProblema de Cargo FijoWilliam Darwin Ñontol CortezОценок пока нет
- Informe Lab 4 Rozamineto Por Deslizamiento SДокумент7 страницInforme Lab 4 Rozamineto Por Deslizamiento SDavid BryanОценок пока нет
- El Universo y El Tiempo de Ilya PrigogineДокумент10 страницEl Universo y El Tiempo de Ilya Prigoginehashimoto31Оценок пока нет
- Historia Del Calculo Infinitesimal Linea Del TiempoДокумент9 страницHistoria Del Calculo Infinitesimal Linea Del Tiemposuper usuario67% (3)
- Instructivo - Demandas de AguaДокумент33 страницыInstructivo - Demandas de AguaMichell Mike SilvaОценок пока нет
- 6 7 Teorema ConvolucionДокумент8 страниц6 7 Teorema ConvolucionAlexander ValenciaОценок пока нет
- Algoritmo para MemorizarДокумент8 страницAlgoritmo para MemorizarRafaél J MalaveОценок пока нет
- 2 Unid Mates Eso3Документ18 страниц2 Unid Mates Eso3pmaldonado9559100% (2)
- FACTORES PRIMOS MCM MCD 9 On LineДокумент6 страницFACTORES PRIMOS MCM MCD 9 On LineHector Hugo Goyes-GuerrónОценок пока нет
- Planeación Diaria Ciencias 2 Bloque 3Документ7 страницPlaneación Diaria Ciencias 2 Bloque 3vh_pizarroОценок пока нет
- Morfologia RegistrosДокумент9 страницMorfologia RegistrosDayanaОценок пока нет
- DibujarДокумент7 страницDibujarFrancisca FariasОценок пока нет
- HarneroДокумент3 страницыHarneroFranco Blackdiamond100% (1)
- Yerfri EstadisticaДокумент38 страницYerfri EstadisticaYeli AriasОценок пока нет
- UntitledДокумент6 страницUntitledYenny Alexandra Martinez GarzonОценок пока нет
- Exposicion Logica JuridicaДокумент7 страницExposicion Logica JuridicaDemetrioDeLosSantosОценок пока нет
- Trabajo Práctico FinalДокумент19 страницTrabajo Práctico Finalრომინა კოლხურიОценок пока нет
- Sistema de Medición y ÁngulosДокумент5 страницSistema de Medición y ÁngulosEdith de la RosaОценок пока нет
- Temperatura Calibracion PDFДокумент57 страницTemperatura Calibracion PDFJavier D. SolisОценок пока нет
- Funciones VeritativasДокумент9 страницFunciones VeritativasAnonymous pf2X9EZARHОценок пока нет
- Práctica 5 - Microsoft ExcelДокумент5 страницPráctica 5 - Microsoft ExcelholahuguitoОценок пока нет