Вам также может понравиться
- 3.1 Engranajes ConicosДокумент31 страница3.1 Engranajes ConicosNick DipeОценок пока нет
- Problemas de Ciclos A GasДокумент3 страницыProblemas de Ciclos A GasSugar Elvir Colonia TelloОценок пока нет
- Presentación de PowerPointДокумент60 страницPresentación de PowerPointFernando Silva PaucarОценок пока нет
- 5 TermoДокумент2 страницы5 TermomonicaОценок пока нет
- Mecanismos - Analisis Algebraico de PosicionДокумент20 страницMecanismos - Analisis Algebraico de PosicionJefersonRamirezОценок пока нет
- Unidad-4 (Subunidades 4.3-4.4) - Ciclo de Carnot en MT y RefrigeracionДокумент46 страницUnidad-4 (Subunidades 4.3-4.4) - Ciclo de Carnot en MT y RefrigeracionMiguel S. RodriguezОценок пока нет
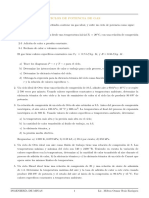
- David Burghardt - Ingenieria Termodinamica 15.8. Un Compresor Alternativo Tiene Un Espacio Muerto de 5% y Diámetro Interior yДокумент9 страницDavid Burghardt - Ingenieria Termodinamica 15.8. Un Compresor Alternativo Tiene Un Espacio Muerto de 5% y Diámetro Interior yJosé María Flores RojasОценок пока нет
- Ejercicios Unidad 1Документ9 страницEjercicios Unidad 1Aldair MartinezОценок пока нет
- Falla FatigaДокумент9 страницFalla FatigaHector Jose Torres MonteroОценок пока нет
- Elementos ConstitutivosДокумент2 страницыElementos ConstitutivosVictor H. Choque UrreloОценок пока нет
- 3Документ4 страницы3fabОценок пока нет
- Metodos de Medicion de Flujo de Canales AbiertosДокумент4 страницыMetodos de Medicion de Flujo de Canales AbiertosSergio Delgado EscobedoОценок пока нет
- Deber TransferenciaДокумент3 страницыDeber TransferenciaALEXANDER201113Оценок пока нет
- Considere Una Central Eléctrica de Vapor Que Opera en El Ciclo Rankine IdealДокумент1 страницаConsidere Una Central Eléctrica de Vapor Que Opera en El Ciclo Rankine IdealRonald Daniel Pacsi NinaОценок пока нет
- L03 FallasEstaticas Ejemplos PDFДокумент12 страницL03 FallasEstaticas Ejemplos PDFKevinElemJordyVílchezLópezОценок пока нет
- Co JinetesДокумент9 страницCo Jinetesarkhamvar24Оценок пока нет
- Reporte 1 de Dinamica y VibracionesДокумент9 страницReporte 1 de Dinamica y VibracionesMiguel Eduardo Rangel CorderoОценок пока нет
- Practica 3Документ11 страницPractica 3César Enrique Villamar LugoОценок пока нет
- Termofluidos Lab 2Документ16 страницTermofluidos Lab 2Nicolas Adolfo Quijon MendozaОценок пока нет
- Semana 2 - AtmosferaДокумент3 страницыSemana 2 - AtmosferaGloria Granda PerezОценок пока нет
- Modulo de Leyva-CrodeДокумент21 страницаModulo de Leyva-CrodeZkim Stallone0% (1)
- Ensayo Sobre Transmision Por Correas Vs Transmision Por Cadenas Dinamica de MaquinasДокумент3 страницыEnsayo Sobre Transmision Por Correas Vs Transmision Por Cadenas Dinamica de MaquinasAlejoОценок пока нет
- Turbinas FrancisДокумент14 страницTurbinas FrancisJōnatąn Klderon100% (1)
- Practica 5. Refrigeración.Документ22 страницыPractica 5. Refrigeración.Maira Alejandra Cubillos TorresОценок пока нет
- Tablas Transferencia de CalorДокумент23 страницыTablas Transferencia de CalorMaria Jose QuirozОценок пока нет
- Ciclo de Refrigeración de Gas Con RegeneraciónДокумент2 страницыCiclo de Refrigeración de Gas Con RegeneraciónRu WiseОценок пока нет
- Sofia Trabajo1Документ13 страницSofia Trabajo1Sofyaa DavilaОценок пока нет
- Ejercicios de Dinamica.Документ2 страницыEjercicios de Dinamica.penedevergaОценок пока нет
- Practica de CizalladoДокумент2 страницыPractica de CizalladoSteve Wozniak100% (1)
- 3er ParcialДокумент1 страница3er ParcialmihuteelОценок пока нет
- Tp3 1Документ7 страницTp3 1erickitoelingОценок пока нет
- Templabilidad y Curvas JominyДокумент18 страницTemplabilidad y Curvas JominymattkidoОценок пока нет
- Investigación Termodinámica II Ciclo Stirling y EricsonДокумент7 страницInvestigación Termodinámica II Ciclo Stirling y EricsonDanny GuzmánОценок пока нет
- Moldeo en Arena VerdeДокумент4 страницыMoldeo en Arena VerdeMitone DiazОценок пока нет
- Ejercicio Ciclo Brayton IdealДокумент4 страницыEjercicio Ciclo Brayton IdealChristopher GarzaОценок пока нет
- Semiconductores PDFДокумент100 страницSemiconductores PDFManuel DelgadoОценок пока нет
- T3-DMII-Ejercicios Extra Clase 701Документ5 страницT3-DMII-Ejercicios Extra Clase 701hector papasОценок пока нет
- Problemario ElementosДокумент2 страницыProblemario ElementosJuan perezОценок пока нет
- Deber 02 AsparsoreДокумент5 страницDeber 02 AsparsoreGeorge LeonardoОценок пока нет
- Áreas de Trabajo Contaminadas Por Gases Humos YpolvosДокумент23 страницыÁreas de Trabajo Contaminadas Por Gases Humos YpolvosVic-Es Sar-GarОценок пока нет
- Un Pequeño Resumen Del Libro de Termodinámica de CengelДокумент3 страницыUn Pequeño Resumen Del Libro de Termodinámica de CengelTerryОценок пока нет
- Ejercicios de La Segunda Ley y Ciclo de CarnotДокумент44 страницыEjercicios de La Segunda Ley y Ciclo de CarnotEdwinManuelDelgadoG100% (1)
- Cuestionario de TermoДокумент3 страницыCuestionario de TermoSalazarJesus100% (2)
- (Ejercicios) Del 2do Tema de Termodin - Mica Analisis de Sistemas AbiertosДокумент7 страниц(Ejercicios) Del 2do Tema de Termodin - Mica Analisis de Sistemas AbiertosJavier GuerreroОценок пока нет
- Diesel de Aire EstándarДокумент1 страницаDiesel de Aire EstándarANALISIS HIDRAULICAОценок пока нет
- Semana 3 SEAДокумент39 страницSemana 3 SEAtonnyОценок пока нет
- Aplicaciones A Flujo de Calor en Estado EstacionarioДокумент2 страницыAplicaciones A Flujo de Calor en Estado EstacionarioAlex IrxОценок пока нет
- TC Tarea 3Документ2 страницыTC Tarea 3Jesus Morales BautistaОценок пока нет
- Tratamiento Termico TempladoДокумент12 страницTratamiento Termico TempladoDiego OspinaОценок пока нет
- Mec - Fluidos, Teorema Del Impulso o Cantidad de MovimientoДокумент16 страницMec - Fluidos, Teorema Del Impulso o Cantidad de MovimientonelsonОценок пока нет
- M1.2 Determinacion de Carga e IrreversibilidadДокумент2 страницыM1.2 Determinacion de Carga e IrreversibilidadUriel Perez Flores0% (1)
- Pelador de ManzanasДокумент10 страницPelador de ManzanasGabriel Mendoza VargasОценок пока нет
- Informe 6Документ9 страницInforme 6Saul LemaОценок пока нет
- Unidad 2 Corregida Versión-HДокумент84 страницыUnidad 2 Corregida Versión-HMisael VicencioОценок пока нет
- Mecanismos de Eslabones ArticularesДокумент11 страницMecanismos de Eslabones ArticularesCarlos JaureguiОценок пока нет
- Relaciones AdiabaticasДокумент5 страницRelaciones AdiabaticasGino Vergara ObandoОценок пока нет
- Sesion 4 - Estructura Cristalina y Difracción de Rayos XДокумент16 страницSesion 4 - Estructura Cristalina y Difracción de Rayos XCoordinadora Slotting Ransa secosОценок пока нет
- Mecanismo de Línea Recta de PeaucellierДокумент4 страницыMecanismo de Línea Recta de PeaucellierJosé Luis Toapanta CevallosОценок пока нет
- Uni2 RequisPrevios2 2aДокумент5 страницUni2 RequisPrevios2 2aMaria de los Angeles InnellaОценок пока нет
- Matematicas 11 Guía Segundo Periodo FuncionesДокумент20 страницMatematicas 11 Guía Segundo Periodo FuncionesPedro Márquez OteroОценок пока нет
- Laboratorio de DeformacionesДокумент6 страницLaboratorio de DeformacionesAdolfo Gonzales GonzalesОценок пока нет
- Averias en El Sistema de RefrigeracionДокумент36 страницAverias en El Sistema de RefrigeracionAndres HerediaОценок пока нет
- Dinamometro de MotoresДокумент9 страницDinamometro de MotoresRaul Mendoza IzarraОценок пока нет
- Ejercicios Resueltos - Medidores de FlujoДокумент5 страницEjercicios Resueltos - Medidores de Flujomahulig50% (4)
- Sistema Diédrico - Wikipedia, La Enciclopedia LibreДокумент5 страницSistema Diédrico - Wikipedia, La Enciclopedia LibreNeg EspinoОценок пока нет
- SERVOCUNA BN-100 Manual Español R 1.2Документ31 страницаSERVOCUNA BN-100 Manual Español R 1.2STEFHANIA LONGASОценок пока нет
- 13 La Resistencia ElectricaДокумент1 страница13 La Resistencia ElectricaLUISA FERNANDA PRIETOОценок пока нет
- Tema 4 Estudios en Patología GeneralДокумент94 страницыTema 4 Estudios en Patología GeneralChristel Benoit VivasОценок пока нет
- Curso Completo BiomecanicaДокумент82 страницыCurso Completo Biomecanicaferk8Оценок пока нет
- Taller 1 - 2023-3Документ5 страницTaller 1 - 2023-3Estefanie CeballosОценок пока нет
- Pec Nom-001-Sede-2012Документ16 страницPec Nom-001-Sede-2012German Favela0% (1)
- Tarea 2 de Bioestadística (QFI) 2019Документ5 страницTarea 2 de Bioestadística (QFI) 2019Melanie MgrmОценок пока нет
- Unidad 5 de GeologiaДокумент10 страницUnidad 5 de GeologiaNemi Osbourne0% (1)
- Pauta Evaluacion Programas NT1 y NT2Документ44 страницыPauta Evaluacion Programas NT1 y NT2christian galdames palma100% (1)
- Determinación Del Calor de Disolución Por El Método de SolubilidadДокумент11 страницDeterminación Del Calor de Disolución Por El Método de SolubilidadOmar Percy RomeroОценок пока нет
- AceroCorrugado SiderurgicaSevillana PDFДокумент3 страницыAceroCorrugado SiderurgicaSevillana PDFjorge quintero galindoОценок пока нет
- Módulo 2Документ6 страницMódulo 2insumeca academiaОценок пока нет
- Variables e HipotesisДокумент23 страницыVariables e HipotesisEduardo Vargas ArancibiaОценок пока нет
- Bezier CurvesДокумент10 страницBezier CurvesValeria ArreolaОценок пока нет
- Solucionario IngChavez PDFДокумент231 страницаSolucionario IngChavez PDFSary Sandoval SantanderОценок пока нет
- Selección de ResortesДокумент14 страницSelección de ResortesBraulio Romero Ramirez100% (2)
- Modelo de Primer Orden de LabuzaДокумент9 страницModelo de Primer Orden de LabuzaXiomara Holguín VillajuanОценок пока нет
- RocasДокумент8 страницRocasChristopher hilario Poma LópezОценок пока нет
- DC12-65 Ritar - Batería de Ciclo Profundo Agm - EnertikДокумент6 страницDC12-65 Ritar - Batería de Ciclo Profundo Agm - EnertikmarianoОценок пока нет
- Control de Emisiones de Fuentes Fijas - Referencias de IRAM 29230-1Документ35 страницControl de Emisiones de Fuentes Fijas - Referencias de IRAM 29230-1Carlos MisanoОценок пока нет
- Cal 2Документ204 страницыCal 2Luis Alfredo ValentinoОценок пока нет
- Unidad Vi AlquinosДокумент28 страницUnidad Vi Alquinos'Juan Carlos Colina'Оценок пока нет
- Ecuación de Balance de MateriaДокумент26 страницEcuación de Balance de MateriaAnonymous MOtaRd100% (1)
- Tecnologia de Los MaterialesДокумент508 страницTecnologia de Los MaterialesJesús Reynaldo Mamani QuiqueОценок пока нет