Вам также может понравиться
- El Cuento BolivianoДокумент3 страницыEl Cuento BolivianoJose Martin Barrios Flores60% (5)
- Martin GuerreДокумент25 страницMartin GuerreSAt41Оценок пока нет
- Ontologia SocialДокумент3 страницыOntologia SocialWilmer SuárezОценок пока нет
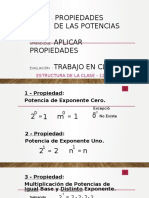
- 03 Propiedades de Las PotenciasДокумент21 страница03 Propiedades de Las PotenciasDavid Esteban Quezada MieresОценок пока нет
- Manual Funciones Coordinador de ArchivoДокумент14 страницManual Funciones Coordinador de ArchivoFerney Garcia GarciaОценок пока нет
- Gthy Gestion PDFДокумент5 страницGthy Gestion PDFAlbert MateoОценок пока нет
- ManualparalaFormaciondeFacilitadoresenlaPruebadeDesarrollloInfantil EDI PDFДокумент138 страницManualparalaFormaciondeFacilitadoresenlaPruebadeDesarrollloInfantil EDI PDFjhoracios836318100% (1)
- 1964 Vida - Con - El - LamaДокумент215 страниц1964 Vida - Con - El - LamaKathia D KostlichОценок пока нет
- El Jasidismo O HasidismoДокумент3 страницыEl Jasidismo O HasidismoMoy Chavarria100% (1)
- Quiz MetodosДокумент9 страницQuiz MetodosKaterin MercadoОценок пока нет
- Actividad # 6 (Ética y Empresa)Документ8 страницActividad # 6 (Ética y Empresa)Mauren AlejandraОценок пока нет
- Aportes Psicologia de La SexualidadДокумент3 страницыAportes Psicologia de La SexualidadJulieth CardenasОценок пока нет
- Tarea 2Документ11 страницTarea 2CARLOS ADRIAN PALACIOS ROSADOОценок пока нет
- Volumetria 1Документ3 страницыVolumetria 1yurbisОценок пока нет
- Definicion y Formulas de Ratios FinancierosДокумент4 страницыDefinicion y Formulas de Ratios FinancierosVeronica Huaccan GutierrezОценок пока нет
- Pliego de Condiciones Definitivo #LP-004-2023Документ67 страницPliego de Condiciones Definitivo #LP-004-2023MAQUINAS OBRAS Y PROYECTOS S.A.S. ZOMACОценок пока нет
- Comprobante MABA101201 MDFRRMA6Документ1 страницаComprobante MABA101201 MDFRRMA6Aime Celeste Martínez BarrónОценок пока нет
- Charla 5 Minutos Lavado de Manos 2007Документ1 страницаCharla 5 Minutos Lavado de Manos 2007Pauly Villarroel MonteroОценок пока нет
- Letra 'Noviembre Sin Ti'Документ4 страницыLetra 'Noviembre Sin Ti'Gabriela ArámburuОценок пока нет
- Diabetes InformeДокумент17 страницDiabetes InformeDaleshka Herrera ParedesОценок пока нет
- Formato EvaluacionДокумент2 страницыFormato EvaluacionPepeito PerezОценок пока нет
- Guia 35 LenguajeДокумент2 страницыGuia 35 LenguajeCaroline Diane González ReyesОценок пока нет
- Big Data y Business IntelligenceДокумент14 страницBig Data y Business IntelligenceAdriana Garcia67% (3)
- Situacion Didactica No.02Документ13 страницSituacion Didactica No.02Anselmo Gonzalez100% (1)
- Pae Completo Ya ListoДокумент26 страницPae Completo Ya Listoyane50% (2)
- Trabajo de Quinolonas PDFДокумент23 страницыTrabajo de Quinolonas PDFYanet Burga Vasquez100% (1)
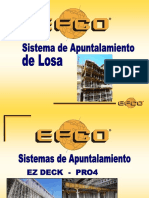
- Losa EFCOДокумент165 страницLosa EFCOPablo CoromadoОценок пока нет
- 1º ESO. La B. Saber Hacer, SantillanaДокумент1 страница1º ESO. La B. Saber Hacer, SantillanaNoèlia Amb AccentОценок пока нет
- E973 Turbina de Vapor - Ignacio MoralesДокумент28 страницE973 Turbina de Vapor - Ignacio MoralesDiego Nicolas Figueroa QuirozОценок пока нет
- República Bolivariana de VenezuelaДокумент9 страницRepública Bolivariana de Venezuelayusmerygarrido311312Оценок пока нет