Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Ray OpticsДокумент52 страницыRay OpticsJack LupinoОценок пока нет
- Hydrothermal Biomass GasificationДокумент9 страницHydrothermal Biomass GasificationCevdet demirtaşОценок пока нет
- 571 SummaryДокумент3 страницы571 SummarySimbu Arasan100% (1)
- OuchterlonyДокумент4 страницыOuchterlonyd_caasi100% (1)
- CHAPTER 2design Against Static LoadДокумент33 страницыCHAPTER 2design Against Static LoadmanishtopsecretsОценок пока нет
- Anti-Dandruff Shampoo With Zinc Pyrithione: INCI Name, Trade Name Weight % FunctionДокумент2 страницыAnti-Dandruff Shampoo With Zinc Pyrithione: INCI Name, Trade Name Weight % FunctionandreeaОценок пока нет
- Standard SpecificationsДокумент5 страницStandard SpecificationsIan54321Оценок пока нет
- 2.Pv Semisolid FDAДокумент37 страниц2.Pv Semisolid FDARahayu Maulida RОценок пока нет
- Vacuum Super Insulated Heat Storage Up To 400 °C: January 2015Документ11 страницVacuum Super Insulated Heat Storage Up To 400 °C: January 2015Arvin SlayerОценок пока нет
- Material Design and Characterization of High Performance Pervious ConcreteДокумент10 страницMaterial Design and Characterization of High Performance Pervious Concreteqwefqwefqwe fqwefqwОценок пока нет
- Flow Simulation and Static Structural Analysis On Pelton TurbineДокумент7 страницFlow Simulation and Static Structural Analysis On Pelton TurbineRahul ReddyОценок пока нет
- Removal of Gaseous Chlorine From Cylinders and Ton ContainersДокумент4 страницыRemoval of Gaseous Chlorine From Cylinders and Ton Containersmailmaverick8167Оценок пока нет
- Geography Sheet Work About HydrographsДокумент1 страницаGeography Sheet Work About HydrographsIsaac CharlesonОценок пока нет
- Self Etching Adhesive On Intact Enamel: Devarasa GM, Subba Reddy VV, Chaitra NLДокумент6 страницSelf Etching Adhesive On Intact Enamel: Devarasa GM, Subba Reddy VV, Chaitra NLNiNis Khoirun NisaОценок пока нет
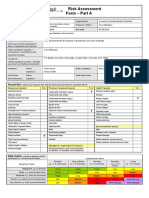
- Risk AssessmentДокумент2 страницыRisk AssessmentFaraiMbudaya0% (1)
- Thule User Manual BMAДокумент12 страницThule User Manual BMABenny MedvedevОценок пока нет
- University Malaya: KKEK 3156 Plant EngineeringДокумент10 страницUniversity Malaya: KKEK 3156 Plant EngineeringJoeОценок пока нет
- Herb-Modle Peptide in Anaerobic Titration and Reduce-05032013Документ4 страницыHerb-Modle Peptide in Anaerobic Titration and Reduce-05032013陳育孝Оценок пока нет
- Proceedings of ICBC 2019Документ499 страницProceedings of ICBC 2019Mohanraj TОценок пока нет
- Unit 4 Study Guide Solutions - Kinetics & ThermoДокумент3 страницыUnit 4 Study Guide Solutions - Kinetics & ThermoPenguin/CatОценок пока нет
- Gases AnswersДокумент8 страницGases AnswersSayОценок пока нет
- Planck's Law - WikipediaДокумент88 страницPlanck's Law - Wikipedia朱岳宸Оценок пока нет
- ACDpumps Oil Well Pump3Документ4 страницыACDpumps Oil Well Pump3mattuiffОценок пока нет
- 1.2.0 Drilling Ref. PFMEAДокумент12 страниц1.2.0 Drilling Ref. PFMEAMani Rathinam RajamaniОценок пока нет
- Chemguard c333 Ar-Afff 3% MsdsДокумент7 страницChemguard c333 Ar-Afff 3% MsdsrendydunОценок пока нет
- 5990 7413enДокумент20 страниц5990 7413enG_ASantosОценок пока нет
- Introduction To Skin Effect Heat Tracing SystemДокумент22 страницыIntroduction To Skin Effect Heat Tracing Systemvivek bevaraОценок пока нет
- Analytical Concepts of Errors, Accuracy and Precision: Group: 2 Eman Fatima Fajar Eman Khadija LubainaДокумент12 страницAnalytical Concepts of Errors, Accuracy and Precision: Group: 2 Eman Fatima Fajar Eman Khadija LubainaAzhan HassanОценок пока нет
- Laboratory ManualДокумент13 страницLaboratory ManualPaul UyОценок пока нет
- Periodic Table Sig Fig B WДокумент1 страницаPeriodic Table Sig Fig B WRicardo VelozОценок пока нет