Вам также может понравиться
- Rock Mass Characterizations and GSIДокумент0 страницRock Mass Characterizations and GSINestor TarazonaОценок пока нет
- Laboratory Testing Manual (2000) PDFДокумент330 страницLaboratory Testing Manual (2000) PDFandressaoliveira2301100% (8)
- Frew19.1 Manual PDFДокумент165 страницFrew19.1 Manual PDFPeteris SkelsОценок пока нет
- ReportДокумент7 страницReportkeroro18Оценок пока нет
- Audit Commission Hong Kong 22 March 2005Документ57 страницAudit Commission Hong Kong 22 March 2005keroro18Оценок пока нет
- Empowering Section: Cap 59I - Construction Sites (Safety) RegulationsДокумент25 страницEmpowering Section: Cap 59I - Construction Sites (Safety) Regulationskeroro18Оценок пока нет
- Constrution SiteДокумент20 страницConstrution Site101arОценок пока нет
- Proeceedings of Geotechnical Advancement in Hong Kong Since 1970s, 15 May 2007, Hong KongДокумент313 страницProeceedings of Geotechnical Advancement in Hong Kong Since 1970s, 15 May 2007, Hong KongcheewingyuenОценок пока нет
- Calculation of Strut StiffnessДокумент1 страницаCalculation of Strut Stiffnesskeroro18Оценок пока нет
- Application of Soil Nail Method For Slope Stability PurposeДокумент101 страницаApplication of Soil Nail Method For Slope Stability Purposevictoryeung98% (60)
- Standard Penetration TestДокумент59 страницStandard Penetration TestcuervohijoguachoОценок пока нет
- Foundation Code 2004Документ64 страницыFoundation Code 2004Patie Zheng100% (2)
- CB201EДокумент66 страницCB201Ekeroro18Оценок пока нет
- Eg 3Документ187 страницEg 3hutuguo100% (1)
- Proeceedings of Geotechnical Advancement in Hong Kong Since 1970s, 15 May 2007, Hong KongДокумент313 страницProeceedings of Geotechnical Advancement in Hong Kong Since 1970s, 15 May 2007, Hong KongcheewingyuenОценок пока нет
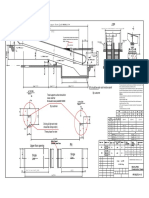
- Details (Arup)Документ1 страницаDetails (Arup)keroro18100% (1)
- Sheet Pile Design HandbookДокумент368 страницSheet Pile Design HandbookLandon Mitchell92% (12)
- Calculation of Strut StiffnessДокумент1 страницаCalculation of Strut Stiffnesskeroro18Оценок пока нет
- Canadian Foundation Engineering Manual 4thДокумент503 страницыCanadian Foundation Engineering Manual 4thyusefmejia86% (35)
- Geotechnical Design of Gabion WallДокумент238 страницGeotechnical Design of Gabion WallHenra Halim100% (10)
- Hkgeologyguidebook eДокумент177 страницHkgeologyguidebook ekeroro18Оценок пока нет
- New York DOT Retaining Wall Lateral Earth Pressure GuideДокумент55 страницNew York DOT Retaining Wall Lateral Earth Pressure Guideurfriend77100% (1)
- Design of Soil Nails for Loose Fill SlopesДокумент107 страницDesign of Soil Nails for Loose Fill SlopesManjula RajakarunaОценок пока нет
- Foundation Design and Construction: Geo Publication No. 1/2006Документ376 страницFoundation Design and Construction: Geo Publication No. 1/2006Jiraphong Songsri93% (15)
- Paper On Waler BeamДокумент0 страницPaper On Waler Beamharicv019Оценок пока нет
- 2008 08 21 Steel Piling Handbook Design EnglischДокумент213 страниц2008 08 21 Steel Piling Handbook Design EnglischIancu-Bogdan Teodoru100% (2)
- Design of Temporary Excavation and Lateral Support System For The DSD Sheung Wan Stormwater Pumping StationДокумент36 страницDesign of Temporary Excavation and Lateral Support System For The DSD Sheung Wan Stormwater Pumping Stationkeroro18100% (1)
- Excavation Support Solutions For A Large Underground ParkingДокумент8 страницExcavation Support Solutions For A Large Underground Parkingkeroro18Оценок пока нет
- Excavation Support Solutions For A Large Underground ParkingДокумент8 страницExcavation Support Solutions For A Large Underground Parkingkeroro18Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Appendix A Beca Napier Port 6 Wharf Preliminary Design Report NZ1 12890385Документ26 страницAppendix A Beca Napier Port 6 Wharf Preliminary Design Report NZ1 12890385wendydy6Оценок пока нет
- Calculating water pressure and turbine selectionДокумент7 страницCalculating water pressure and turbine selectionMaulidОценок пока нет
- Durock DEFSДокумент5 страницDurock DEFSJose Antonio FigueroaОценок пока нет
- Chapter 4 - Food Physics - RheologyДокумент88 страницChapter 4 - Food Physics - RheologyNhi Trương MẫnОценок пока нет
- STATIC FORCE PROCEDUREДокумент10 страницSTATIC FORCE PROCEDURECharlyn CostalesОценок пока нет
- 00020631Документ14 страниц00020631Imad Taher AliОценок пока нет
- NDOT Geotechnical Manual Chapter on Analysis and DesignДокумент53 страницыNDOT Geotechnical Manual Chapter on Analysis and DesignAnonymous rQKN6vVОценок пока нет
- Ground-Mount Solar Array FoundationsДокумент12 страницGround-Mount Solar Array FoundationsimamtaОценок пока нет
- PSV Calcs PDFДокумент8 страницPSV Calcs PDFatulОценок пока нет
- Strength of Materials QP BANKДокумент15 страницStrength of Materials QP BANKmechfameОценок пока нет
- PRISM JOHNSON LIMITED RMC India Division Central Laboratory, Kolkata Trial Mix ReportДокумент1 страницаPRISM JOHNSON LIMITED RMC India Division Central Laboratory, Kolkata Trial Mix Reportabir senguptaОценок пока нет
- Earthquake Resistant Design of Structures for DuctilityДокумент10 страницEarthquake Resistant Design of Structures for DuctilityYeni TewatiaОценок пока нет
- Lecture 8.0 Bearing Capacity of Shallow FoundationДокумент30 страницLecture 8.0 Bearing Capacity of Shallow FoundationjbjuanzonОценок пока нет
- Quantity Shuttering: Tower-A B2 (Lower)Документ4 страницыQuantity Shuttering: Tower-A B2 (Lower)vikasОценок пока нет
- Tunnel - Calculation Lining Design LRFDДокумент62 страницыTunnel - Calculation Lining Design LRFDDarmadi100% (1)
- Damage Temperature Inspection MonitoringДокумент11 страницDamage Temperature Inspection MonitoringRaghavan Venkatraman100% (1)
- Basic Theory PumpДокумент37 страницBasic Theory PumpkunkzОценок пока нет
- Fema 451 Part 2Документ509 страницFema 451 Part 2Sagar M JadhavОценок пока нет
- Ce 602 Set CДокумент9 страницCe 602 Set CJade Paul D. BesanaОценок пока нет
- Firestopping Standard Details Guide 14mbДокумент76 страницFirestopping Standard Details Guide 14mbJohn TrimmОценок пока нет
- Gas Dynamics Question BankДокумент3 страницыGas Dynamics Question BankChanduОценок пока нет
- Mohan Bidkar: Retd. Adee / TRD / Manmad Central RailwayДокумент90 страницMohan Bidkar: Retd. Adee / TRD / Manmad Central RailwayUpendra kumar SinghОценок пока нет
- Anite WorkДокумент4 страницыAnite WorkShenbagaraja PandianОценок пока нет
- ACI Building Code Requirements for Thin Shells and Folded PlatesДокумент84 страницыACI Building Code Requirements for Thin Shells and Folded PlateskrishnanunniОценок пока нет
- ICTAD Fire RegulationsДокумент128 страницICTAD Fire RegulationsAvk Sanjeevan82% (17)
- 191114-Drawing VR1000-0 5-10-R4000 Sanur Building PDFДокумент1 страница191114-Drawing VR1000-0 5-10-R4000 Sanur Building PDFDaveОценок пока нет
- Week-4-Lectures 7 and 8 - Sewerage System Design-Estimation of Flows PDFДокумент41 страницаWeek-4-Lectures 7 and 8 - Sewerage System Design-Estimation of Flows PDFAli RazaОценок пока нет
- Aspirating Smoke Detector Pipe Installation: User GuideДокумент20 страницAspirating Smoke Detector Pipe Installation: User GuideGabetsos KaraflidisОценок пока нет
- L&T-Chiyoda: PROJECT NAME: EPCC-07 Package - Dual Feed Cracker Block For HPCL Rajasthan Refinery Limited (HRRL)Документ42 страницыL&T-Chiyoda: PROJECT NAME: EPCC-07 Package - Dual Feed Cracker Block For HPCL Rajasthan Refinery Limited (HRRL)mahesh naikОценок пока нет
- Analysis and Building Using Staad ProДокумент1 страницаAnalysis and Building Using Staad ProAbdul RazzakОценок пока нет