Вам также может понравиться
- Workshop 4 - Draft2Документ6 страницWorkshop 4 - Draft2Saatwick MathurОценок пока нет
- Business Analyst Interview QuestionsДокумент49 страницBusiness Analyst Interview Questionsmital patel100% (4)
- Control Inverted Pendulum Using Heuristic Energy LQRДокумент5 страницControl Inverted Pendulum Using Heuristic Energy LQRLê Tuấn MinhОценок пока нет
- Language As IdeologyДокумент26 страницLanguage As IdeologyAlcione Gonçalves Campos100% (2)
- Instruction and Maintenance Manual: Silenced Screw Rotary Compressor UnitsДокумент34 страницыInstruction and Maintenance Manual: Silenced Screw Rotary Compressor UnitsJohnny Diaz VargasОценок пока нет
- Sample:OPS-English Evaluation FormДокумент3 страницыSample:OPS-English Evaluation FormshieroОценок пока нет
- FinePrint pdfFactory Pro Trial Version PDF CreationДокумент40 страницFinePrint pdfFactory Pro Trial Version PDF CreationTUAN NGUYEN VANОценок пока нет
- ASV Posi-Track PT-80 Track Loader Parts Catalogue Manual PDFДокумент14 страницASV Posi-Track PT-80 Track Loader Parts Catalogue Manual PDFfisekkkdОценок пока нет
- Voltage-Oriented Vector Control Improves Induction Motor PerformanceДокумент10 страницVoltage-Oriented Vector Control Improves Induction Motor PerformanceDaniel GutierrezОценок пока нет
- Experiment 3 PDFДокумент8 страницExperiment 3 PDFPrateek NyatiОценок пока нет
- Control of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemДокумент6 страницControl of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemhassenbbОценок пока нет
- Disturbance Accommodating LQR Method Based Pitch Control Strategy For Wind TurbinesДокумент5 страницDisturbance Accommodating LQR Method Based Pitch Control Strategy For Wind TurbinesStefania OliveiraОценок пока нет
- DSP-Based Speed Adaptive Flux Observer of Induction MotorДокумент5 страницDSP-Based Speed Adaptive Flux Observer of Induction MotorthavaselvanОценок пока нет
- Christophgruber Mechatronics2012Документ8 страницChristophgruber Mechatronics2012Hamza NasirОценок пока нет
- ScaraДокумент7 страницScaraAnand Kumar MishraОценок пока нет
- Loop Shapind Design ProcedureДокумент4 страницыLoop Shapind Design ProcedureRitesh SinghОценок пока нет
- Decoupling Control of D and Q CurrentДокумент11 страницDecoupling Control of D and Q CurrentnandarathanaОценок пока нет
- An Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangДокумент5 страницAn Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangPadmo PadmundonoОценок пока нет
- A Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorДокумент6 страницA Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorwaweeОценок пока нет
- Control of Inverted PendulumДокумент5 страницControl of Inverted PendulumalfredccОценок пока нет
- A ComparisonДокумент6 страницA ComparisonPedro PeregrinoОценок пока нет
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsДокумент4 страницыResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloОценок пока нет
- Controller Design of Inverted Pendulum Using Pole Placement and LQRДокумент7 страницController Design of Inverted Pendulum Using Pole Placement and LQRInternational Journal of Research in Engineering and Technology100% (1)
- Inverted PendulamДокумент34 страницыInverted PendulamVi JayОценок пока нет
- Controlling Rotary Inverted Pendulum Using PID & LQR ControllersДокумент26 страницControlling Rotary Inverted Pendulum Using PID & LQR ControllersAASISH KUMAR JENAОценок пока нет
- Final Project FinalReport VikasYADAVДокумент12 страницFinal Project FinalReport VikasYADAVviya123Оценок пока нет
- Position Control of A PM Stepper Motor Using Neural NetworksДокумент4 страницыPosition Control of A PM Stepper Motor Using Neural NetworksLucas MartinezОценок пока нет
- Linear ControlДокумент8 страницLinear ControlKuying KunyitОценок пока нет
- Abstract. The Balancing of An Inverted Pendulum byДокумент5 страницAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaОценок пока нет
- (Matsui) Sensorless PM Brushless DC Motor DrivesДокумент9 страниц(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngОценок пока нет
- ELEC 5565 - Electric Drives and CTRL LabДокумент13 страницELEC 5565 - Electric Drives and CTRL LabNur Azlin Mohd YusoffОценок пока нет
- yang1991Документ2 страницыyang1991dora guzmanОценок пока нет
- Variable Structure Adaptive Control For P M Synchronous Servo Motor DriveДокумент13 страницVariable Structure Adaptive Control For P M Synchronous Servo Motor DrivelcheekalaОценок пока нет
- Application of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965Документ6 страницApplication of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965new7677100% (1)
- Analysis and Research of Inverted Pendulum Time-VaryingДокумент4 страницыAnalysis and Research of Inverted Pendulum Time-VaryingsalmanОценок пока нет
- Dual Motor Pendulum Positioning SystemДокумент4 страницыDual Motor Pendulum Positioning Systempatmos666Оценок пока нет
- Speed Regulation An Induction Motor Using Reference Adaptive ControlДокумент5 страницSpeed Regulation An Induction Motor Using Reference Adaptive ControlAtakan OzturKОценок пока нет
- The Real Time Network Control of The InvДокумент10 страницThe Real Time Network Control of The InvMarcu MardareОценок пока нет
- Online Control of SVC Using ANN Based Pole Placement ApproachДокумент5 страницOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliОценок пока нет
- Adaptive State Controller Swings Up and Balances Inverted PendulumДокумент6 страницAdaptive State Controller Swings Up and Balances Inverted PendulumNeagu AdrianОценок пока нет
- Design and Implementation Three-Arms Rectifier Inverter of A Single PhaseДокумент6 страницDesign and Implementation Three-Arms Rectifier Inverter of A Single Phasecelo81Оценок пока нет
- A Torque Control Method of Three-Inertia Torsional System With Backlash856Документ6 страницA Torque Control Method of Three-Inertia Torsional System With Backlash856Mohamed BerririОценок пока нет
- Active Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der SuДокумент6 страницActive Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der Su01689373477Оценок пока нет
- Anti-Swing Control For An Overhead Crane With Fuzzy Compensation X L, W YДокумент11 страницAnti-Swing Control For An Overhead Crane With Fuzzy Compensation X L, W Ytidjani86Оценок пока нет
- 3 Inverted Pendulum ProjectДокумент26 страниц3 Inverted Pendulum ProjectJoshua D JohnОценок пока нет
- Sensorless Control of Induction Motors With Exponential Stability PropertyДокумент6 страницSensorless Control of Induction Motors With Exponential Stability PropertyHassan KhalidОценок пока нет
- Interpolation Technique For Encoder Resolution Improvement in Permanent Magnet Synchronous Motor Drives PDFДокумент6 страницInterpolation Technique For Encoder Resolution Improvement in Permanent Magnet Synchronous Motor Drives PDFarenasjaОценок пока нет
- IATS'11 Sliding Mode Control of DC-DC Buck-Boost ConverterДокумент6 страницIATS'11 Sliding Mode Control of DC-DC Buck-Boost Converterrkp369Оценок пока нет
- Design of Fuzzy Sliding Mode Control For DC-DC ConverterДокумент6 страницDesign of Fuzzy Sliding Mode Control For DC-DC ConverterXime Mendez FloresОценок пока нет
- Muh 27 5 4 020Документ17 страницMuh 27 5 4 020senvimjagОценок пока нет
- CLOSED-LOOP HYDRAULIC POSITION CONTROLДокумент9 страницCLOSED-LOOP HYDRAULIC POSITION CONTROLGerardo Loreto GomezОценок пока нет
- Master-Slave Sliding Control of Parallel InvertersДокумент8 страницMaster-Slave Sliding Control of Parallel Invertersvirus101Оценок пока нет
- Study of Strapdown Inertial Navigation Integration AlgorithmsДокумент4 страницыStudy of Strapdown Inertial Navigation Integration AlgorithmstangphamvanОценок пока нет
- New Functional Observer Estimates Velocity, Acceleration and DisturbanceДокумент6 страницNew Functional Observer Estimates Velocity, Acceleration and DisturbanceRaj KumarОценок пока нет
- Modeling: SystemДокумент5 страницModeling: SystemBetlejemОценок пока нет
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerДокумент8 страницOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyОценок пока нет
- Adaptive Altitude Control For A Small Helicopter in A Vertical Stand-Alejandro DzulДокумент6 страницAdaptive Altitude Control For A Small Helicopter in A Vertical Stand-Alejandro DzulskfrankoОценок пока нет
- Self-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverДокумент5 страницSelf-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverrezadigitОценок пока нет
- WM2.1 Sliding Mode Brushless DC Motor Current and Torque Control AlgorithmsДокумент6 страницWM2.1 Sliding Mode Brushless DC Motor Current and Torque Control Algorithmscarolain_msОценок пока нет
- Ee 331 Design - Servo MotorДокумент5 страницEe 331 Design - Servo MotorLa-Pierre O'MeallyОценок пока нет
- Slide Mode Control Current Mode Control in DC-DC Converters: Cristina MorelДокумент6 страницSlide Mode Control Current Mode Control in DC-DC Converters: Cristina MorelJaramillo Rojas IsaacОценок пока нет
- Dien Co Ban May BayДокумент102 страницыDien Co Ban May Baykhanh nguyenОценок пока нет
- Control of DC Motor Using Different Control StrategiesОт EverandControl of DC Motor Using Different Control StrategiesОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetОт EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetОценок пока нет
- Scoring Rubric For Oral Presentations Total Points ScoreДокумент2 страницыScoring Rubric For Oral Presentations Total Points ScoreLezia pagdonsolanОценок пока нет
- Object-Oriented Programming Lab Manual RДокумент63 страницыObject-Oriented Programming Lab Manual RKLR CETОценок пока нет
- Binary PDFДокумент13 страницBinary PDFbyprasadОценок пока нет
- Accenture Inside Corporate MandAДокумент28 страницAccenture Inside Corporate MandAshshanksОценок пока нет
- Camera Raw UpdateДокумент3 страницыCamera Raw UpdateHamsharfiОценок пока нет
- Stock PartДокумент20 страницStock PartGReyОценок пока нет
- SKFДокумент26 страницSKFRahul ParikhОценок пока нет
- 3 Spaces Nov 09Документ62 страницы3 Spaces Nov 09Somy ElseОценок пока нет
- Simovert Masterdrives VCДокумент16 страницSimovert Masterdrives VCangeljavier9Оценок пока нет
- Civilstrips Installation NotesДокумент3 страницыCivilstrips Installation NotesKoeswara SofyanОценок пока нет
- Grade 9 ICT Network Configuration GuideДокумент15 страницGrade 9 ICT Network Configuration GuideMark Anthony Nieva RafalloОценок пока нет
- Final ProjectДокумент27 страницFinal ProjectMohit KeshriОценок пока нет
- Managing Information for Better DecisionsДокумент12 страницManaging Information for Better DecisionsTosin WilliamsОценок пока нет
- Medical Robot ReportДокумент21 страницаMedical Robot Reporta_m_shihaОценок пока нет
- B2BДокумент31 страницаB2BAjay MaheskaОценок пока нет
- B2B ApiДокумент350 страницB2B ApiratnavelpОценок пока нет
- TARPfinal PDFДокумент28 страницTARPfinal PDFRakesh ReddyОценок пока нет
- F. M. 1Документ3 страницыF. M. 1Aashish PardeshiОценок пока нет
- wndw3 Print PDFДокумент520 страницwndw3 Print PDFbryanth9Оценок пока нет
- Drilling: Drilling Is A Cutting Process That Uses A Drill Bit To Cut or Enlarge A Hole of Circular Cross-Section inДокумент9 страницDrilling: Drilling Is A Cutting Process That Uses A Drill Bit To Cut or Enlarge A Hole of Circular Cross-Section inAekanshОценок пока нет
- EZSkin v3 User GuideДокумент16 страницEZSkin v3 User GuidePg1978Оценок пока нет
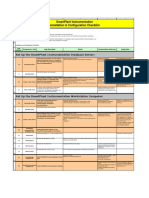
- SmartPlant Instrumentation installation checklistДокумент2 страницыSmartPlant Instrumentation installation checklistmnoormohamed82Оценок пока нет
- 1989 Volvo 740 Instruments and ControlsДокумент107 страниц1989 Volvo 740 Instruments and Controlsskyliner538Оценок пока нет
- Communication in AfricaДокумент5 страницCommunication in AfricaJaque TornneОценок пока нет