Вам также может понравиться
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- Induction MotorsДокумент14 страницInduction MotorsAbdul RaheemОценок пока нет
- InductionMotors Gate Material PartBДокумент38 страницInductionMotors Gate Material PartBpraveen6494Оценок пока нет
- Induction Motors: The Concept of Rotor SlipДокумент12 страницInduction Motors: The Concept of Rotor Sliphafiz_jaaffarОценок пока нет
- Three Phase Induction Motor ReportДокумент24 страницыThree Phase Induction Motor ReportSiddharth NandhanОценок пока нет
- Induction Machine ReportДокумент24 страницыInduction Machine ReportSiddharth NandhanОценок пока нет
- B. Tech. 2: TEE.7O2Документ7 страницB. Tech. 2: TEE.7O2bigshark12345Оценок пока нет
- 18037959Документ5 страниц18037959Gathy BrayohОценок пока нет
- ELG3311: Assignment 3: Problem 6-12Документ15 страницELG3311: Assignment 3: Problem 6-12Gathy BrayohОценок пока нет
- Induction Machines: Torque Speed CharacteristicsДокумент22 страницыInduction Machines: Torque Speed CharacteristicsGogioman Myhay100% (1)
- Induction Motor Modeling - Steady StateДокумент43 страницыInduction Motor Modeling - Steady Statedivinelight100% (3)
- Chap 7 Solutions PDFДокумент34 страницыChap 7 Solutions PDFIbrahim Hussain100% (1)
- Elx 311 Chap 7 SlidesДокумент23 страницыElx 311 Chap 7 SlidesDaniyar SeytenovОценок пока нет
- Motor Star Delta ConnectionДокумент11 страницMotor Star Delta ConnectionsubirmeОценок пока нет
- EEL203 Tutorial Test-III - Solutions PDFДокумент6 страницEEL203 Tutorial Test-III - Solutions PDFvammeenaОценок пока нет
- EEM483 Experiment1Документ10 страницEEM483 Experiment1Onat ŞenelОценок пока нет
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Документ10 страницSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjОценок пока нет
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsДокумент15 страницLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuОценок пока нет
- Induction MachinesДокумент82 страницыInduction Machinesanon_386990813Оценок пока нет
- No Load Test: ObjectiveДокумент5 страницNo Load Test: ObjectiveyashОценок пока нет
- Induction MotorДокумент6 страницInduction MotorMuhamad NafianОценок пока нет
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesДокумент63 страницыElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeОценок пока нет
- Practice ProblemsДокумент4 страницыPractice Problemsdragon_warrior112456804Оценок пока нет
- Induction Motor Parameter MeasurementДокумент10 страницInduction Motor Parameter Measurementvaljir23Оценок пока нет
- Lab 13 - Wound Rotor Induction MotorДокумент6 страницLab 13 - Wound Rotor Induction MotorJeth MadriagaОценок пока нет
- Chapter 6 - Induction Motors (Part1)Документ18 страницChapter 6 - Induction Motors (Part1)SanjanaLakshmiОценок пока нет
- Electrical Drives UNIT-3: Vii Semester ETEE-401Документ163 страницыElectrical Drives UNIT-3: Vii Semester ETEE-401Jeet DattaОценок пока нет
- Retardation TestДокумент5 страницRetardation TestAnkit Shetty100% (1)
- Experiment 5Документ8 страницExperiment 5rastgonikoОценок пока нет
- Induction MotorДокумент39 страницInduction MotorAhmed MagdyОценок пока нет
- ASSIGNMENT Elektric q1-q3Документ16 страницASSIGNMENT Elektric q1-q3Nur Aisyah ZainuddinОценок пока нет
- Determining Rotor Leakage ReactanceДокумент5 страницDetermining Rotor Leakage ReactanceGaspar RodríguezОценок пока нет
- Tut 3Документ3 страницыTut 3mohanrajgupta1950% (2)
- 3 Phase Slip Ring Inductionmotor LoadtestДокумент9 страниц3 Phase Slip Ring Inductionmotor LoadtestBhatia AdvancedОценок пока нет
- Induction Motors PDFДокумент108 страницInduction Motors PDFKshitij ShrivastavaОценок пока нет
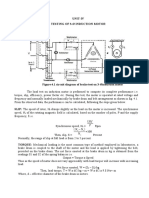
- Unit-Iv Testing of 3-Ø Induction MotorДокумент12 страницUnit-Iv Testing of 3-Ø Induction MotorAshok PОценок пока нет
- AC Power Tut Qns PDFДокумент26 страницAC Power Tut Qns PDFAlex LakeОценок пока нет
- Lec4 Polyphase Induction Motor IIДокумент14 страницLec4 Polyphase Induction Motor IIMohammed Dyhia AliОценок пока нет
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyДокумент13 страницIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimОценок пока нет
- Kramer DriveДокумент42 страницыKramer DriveSenthil Kumar100% (1)
- Induction Motor QuestionsДокумент16 страницInduction Motor QuestionsOussama SamirОценок пока нет
- Three Phase Induction Motors 2018Документ18 страницThree Phase Induction Motors 2018phillipkeiron123Оценок пока нет
- Contoh Soal Mesin ListrikДокумент2 страницыContoh Soal Mesin ListrikizzathuftОценок пока нет
- Chapter 7-Induction Motors Part1 PDFДокумент18 страницChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkОценок пока нет
- Chapter7 - Single Phase MotorДокумент10 страницChapter7 - Single Phase MotorMohd Jamal Mohd MoktarОценок пока нет
- ME2135 Lab ReportДокумент6 страницME2135 Lab ReportLakshmi BalasubramaniamОценок пока нет
- Chapter 3 Three Phase Induction MotorДокумент46 страницChapter 3 Three Phase Induction MotorShikoyeniОценок пока нет
- Unified Theory of Torque Production in Switched and Synchronous Reluctance MotorsДокумент6 страницUnified Theory of Torque Production in Switched and Synchronous Reluctance Motorsdhirajbharat20Оценок пока нет
- MakinaДокумент51 страницаMakinaFarid RizvanliОценок пока нет
- Chapter 16Документ11 страницChapter 16Johnny Lee Worthy IIIОценок пока нет
- Homework-Induction Motor 2017Документ2 страницыHomework-Induction Motor 2017Hebert HuertasОценок пока нет
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesДокумент7 страницECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterОценок пока нет
- تقرير مختبراتДокумент6 страницتقرير مختبراتAreej AdeebОценок пока нет
- 4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor TestsДокумент4 страницы4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor Testsmandadi_sailesh50% (2)
- Upec 2Документ7 страницUpec 2manjusingОценок пока нет
- EEE G544/09/CompreДокумент1 страницаEEE G544/09/ComprePrateek PareekОценок пока нет
- EED402 Practice Problems Hints For SolutionsДокумент2 страницыEED402 Practice Problems Hints For SolutionsShambhavi VarmaОценок пока нет
- Excavation and Trenching Implementation PlanДокумент29 страницExcavation and Trenching Implementation Planracing.phreakОценок пока нет
- External InterruptДокумент4 страницыExternal Interruptsiva kumaarОценок пока нет
- Legend 1028KДокумент2 страницыLegend 1028KAndres Fdo Mora DОценок пока нет
- Chapter 2 Solutions - Power-Generation-OperationДокумент11 страницChapter 2 Solutions - Power-Generation-OperationKleilson Chagas50% (4)
- APTET 2014 Social Question Paper II With Solutions PDFДокумент47 страницAPTET 2014 Social Question Paper II With Solutions PDFgayathriОценок пока нет
- ITP FORMAT - PSV Modified FormateДокумент1 страницаITP FORMAT - PSV Modified Formatemurthy challapalliОценок пока нет
- Haggling As A Socio-Pragmatic Strategy (A Case Study of Idumota Market)Документ15 страницHaggling As A Socio-Pragmatic Strategy (A Case Study of Idumota Market)Oshoja Tolulope OlalekanОценок пока нет
- Yamaha Gp1200 Owners ManualДокумент3 страницыYamaha Gp1200 Owners ManualGregoryОценок пока нет
- Jurnal: Ekonomi PembangunanДокумент14 страницJurnal: Ekonomi PembangunanAgus MelasОценок пока нет
- 2013 - To and Fro. Modernism and Vernacular ArchitectureДокумент246 страниц2013 - To and Fro. Modernism and Vernacular ArchitecturesusanaОценок пока нет
- An Example of A Rating Scale To Q4Документ4 страницыAn Example of A Rating Scale To Q4Zeeshan ch 'Hadi'Оценок пока нет
- Probability of Event Intersections: Vietnamese-German UniversityДокумент17 страницProbability of Event Intersections: Vietnamese-German UniversityĐặng ThưОценок пока нет
- Implications of PropTechДокумент107 страницImplications of PropTechAnsar FarooqiОценок пока нет
- Tankless Vs TankДокумент2 страницыTankless Vs TankClick's PlumbingОценок пока нет
- Questionnaire Supply ChainДокумент4 страницыQuestionnaire Supply ChainKshatriy'as ThigalaОценок пока нет
- Project 8 - Part 1 - ResumeДокумент2 страницыProject 8 - Part 1 - Resumeapi-275234784Оценок пока нет
- Week 1 - Intrduction To Nursing Research - StudentДокумент24 страницыWeek 1 - Intrduction To Nursing Research - StudentWani GhootenОценок пока нет
- Unit 2-Translation Practice MarkДокумент3 страницыUnit 2-Translation Practice MarkHương ThảoОценок пока нет
- Vedic Astrology - Marriage Star Matching Compatibility For Pooraadam Girl and Aayilyam BoyДокумент1 страницаVedic Astrology - Marriage Star Matching Compatibility For Pooraadam Girl and Aayilyam BoyRam GopalОценок пока нет
- Preparation of Giemsa Working SolutionДокумент4 страницыPreparation of Giemsa Working SolutionMUHAMMAD DIMAS YUSUF 1903031Оценок пока нет
- C PM 71.v2016-12-11 PDFДокумент31 страницаC PM 71.v2016-12-11 PDFbobi2201Оценок пока нет
- 335 Model DDX-LP Dry Pipe Valve SystemДокумент8 страниц335 Model DDX-LP Dry Pipe Valve SystemM Kumar MarimuthuОценок пока нет
- Multidisciplinary Research: EPRA International Journal ofДокумент5 страницMultidisciplinary Research: EPRA International Journal ofMathavan VОценок пока нет
- Action Research MethodДокумент27 страницAction Research MethodNiño Czar RaroОценок пока нет
- 01 Agile Challenge-Does Anyone Have A PencilДокумент13 страниц01 Agile Challenge-Does Anyone Have A PencilAbhisek MukherjeeОценок пока нет
- AEF0 - File 1,2,3Документ3 страницыAEF0 - File 1,2,3Nayib Bucarin CarlОценок пока нет
- Questionaire Abusive Supervision SurveyДокумент2 страницыQuestionaire Abusive Supervision SurveyAabee SyedОценок пока нет
- Access MISS ProxyДокумент7 страницAccess MISS ProxyKorintus TedyОценок пока нет
- ZXDC48 FB101 Lithium-Ion Battery User Manual V1.0Документ43 страницыZXDC48 FB101 Lithium-Ion Battery User Manual V1.0Luis Cruz96% (24)
- Rotak: Downloaded From Manuals Search EngineДокумент18 страницRotak: Downloaded From Manuals Search EngineOvidiu BrinzanОценок пока нет