Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Fundamentals of PFC CorrectionДокумент24 страницыFundamentals of PFC Correctionsuji100% (1)
- Cam Clay and Modified Cam Clay Material Models ExplainedДокумент11 страницCam Clay and Modified Cam Clay Material Models ExplainedJonathan TeixeiraОценок пока нет
- Learning Activity Sheet General Chemistry 2 (Q4 - Lessons 1 and 2) Spontaneous Process and EntropyДокумент10 страницLearning Activity Sheet General Chemistry 2 (Q4 - Lessons 1 and 2) Spontaneous Process and EntropyJeffrey YumangОценок пока нет
- Radar EquationДокумент10 страницRadar EquationMoustapha RachidiОценок пока нет
- Project (Exergy Analysis of Steam Power Plant)Документ76 страницProject (Exergy Analysis of Steam Power Plant)Shashi Bhushan Patel88% (8)
- Industrial Training ReportДокумент42 страницыIndustrial Training ReportMartins Richmond100% (4)
- CHAPTER 31 Faraday S LawДокумент27 страницCHAPTER 31 Faraday S LawSattishZeeОценок пока нет
- Test 1 PHYF 125 Trimester II 2010/2011 Name: Section: Date:: e 9 2 2 o - 12 2 2 Proton - 27 Proton - 19Документ5 страницTest 1 PHYF 125 Trimester II 2010/2011 Name: Section: Date:: e 9 2 2 o - 12 2 2 Proton - 27 Proton - 19SattishZeeОценок пока нет
- CHAPTER 29 Magnetic FieldДокумент30 страницCHAPTER 29 Magnetic FieldSattishZeeОценок пока нет
- Magnetic Fields and LawsДокумент30 страницMagnetic Fields and LawsSattishZeeОценок пока нет
- CC1608 - Fire Systems Design GuideДокумент20 страницCC1608 - Fire Systems Design GuidePhạm Thanh SơnОценок пока нет
- PHYF 115 Tutorial QuestionsДокумент25 страницPHYF 115 Tutorial QuestionsSattishZeeОценок пока нет
- CC1608 - Fire Systems Design GuideДокумент20 страницCC1608 - Fire Systems Design GuidePhạm Thanh SơnОценок пока нет
- Fire Alarm SystemДокумент7 страницFire Alarm SystemSattishZeeОценок пока нет
- MEHB323 Tutorial Assignment 6Документ2 страницыMEHB323 Tutorial Assignment 6SattishZeeОценок пока нет
- Enabling Wifi Hotspot On Windows 7/8Документ1 страницаEnabling Wifi Hotspot On Windows 7/8ArisMulyadiОценок пока нет
- Esquema Arduino UNO R3Документ1 страницаEsquema Arduino UNO R3stangne1Оценок пока нет
- PEДокумент2 страницыPESattishZeeОценок пока нет
- MEHB323 Tutorial Assignment 1Документ3 страницыMEHB323 Tutorial Assignment 1SattishZeeОценок пока нет
- ShaftДокумент1 страницаShaftSattishZeeОценок пока нет
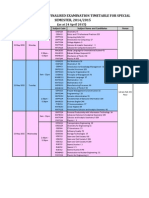
- Finalised Examination Timetable For Special Semester 2014-2015Документ2 страницыFinalised Examination Timetable For Special Semester 2014-2015SattishZeeОценок пока нет
- Project Outline - Sem II 2014 2015Документ2 страницыProject Outline - Sem II 2014 2015SattishZeeОценок пока нет
- Finalised Examination Timetable For Special Semester 2014-2015Документ2 страницыFinalised Examination Timetable For Special Semester 2014-2015SattishZeeОценок пока нет
- Graph AssignmentДокумент6 страницGraph AssignmentSattishZeeОценок пока нет
- Cooling Strategies, Summer Comfort and Energy Performance of A Rehabilitated Passive Standard Office Building PDFДокумент9 страницCooling Strategies, Summer Comfort and Energy Performance of A Rehabilitated Passive Standard Office Building PDFIkutegbe CharlesОценок пока нет
- Creep Testing Kappa SSДокумент2 страницыCreep Testing Kappa SSGustavo LealОценок пока нет
- Semianalytical Productivity Models For Perforated CompletionsДокумент10 страницSemianalytical Productivity Models For Perforated CompletionsPhước LêОценок пока нет
- Nikolas TeslaДокумент4 страницыNikolas TeslaJamesОценок пока нет
- Question Bank-EE 401 Type 1 - Multiple Choice Questions: Page 1 of 13Документ43 страницыQuestion Bank-EE 401 Type 1 - Multiple Choice Questions: Page 1 of 13Rishabh KaliaОценок пока нет
- GV240 Series: Advanced Switching SolutionsДокумент7 страницGV240 Series: Advanced Switching SolutionsBiagio PadulaОценок пока нет
- Gas Dynamics CourseДокумент5 страницGas Dynamics CourseBalveer CLОценок пока нет
- NMR Spectroscopy Integrals and MultiplicityДокумент6 страницNMR Spectroscopy Integrals and MultiplicitysupriyoОценок пока нет
- Rectilinear and rotational kinematics problemsДокумент5 страницRectilinear and rotational kinematics problemsAljay Dungao40% (5)
- Gas Absorption Lab ReportДокумент7 страницGas Absorption Lab ReportShida ShamОценок пока нет
- Answers To EOC Questions: Cambridge International A Level PhysicsДокумент2 страницыAnswers To EOC Questions: Cambridge International A Level PhysicsDuy TôОценок пока нет
- Factors Affecting Reaction RateДокумент29 страницFactors Affecting Reaction RateIna Chiu100% (1)
- PHY110 CHAPTER 1-Week 1Документ49 страницPHY110 CHAPTER 1-Week 1SOFIAH NAJWA BINTI SHAMSUDDINОценок пока нет
- Surface Tension by Capillary RiseДокумент4 страницыSurface Tension by Capillary RiseHASANОценок пока нет
- Structural CalculationДокумент5 страницStructural CalculationEze NonsoОценок пока нет
- Book NameДокумент4 страницыBook NamejayaОценок пока нет
- Narayana 23-06-2022 Outgoing SR Jee Main Model GTM 18 QP FinalДокумент17 страницNarayana 23-06-2022 Outgoing SR Jee Main Model GTM 18 QP FinalShreyas VedantiОценок пока нет
- Tutorial 3Документ2 страницыTutorial 3sdfsdf3erwtr34tertОценок пока нет
- Wolfram Models For Physics PDFДокумент448 страницWolfram Models For Physics PDFjcОценок пока нет
- Chapter 7 Fourier Series: 1 Learning OutcomesДокумент12 страницChapter 7 Fourier Series: 1 Learning OutcomesMorsaleen ChowdhuryОценок пока нет
- GATE EE/ECCapacitorДокумент9 страницGATE EE/ECCapacitornarendra mauryaОценок пока нет
- 44-4345CAT SensorsAndEmittersInfraredSensingДокумент48 страниц44-4345CAT SensorsAndEmittersInfraredSensingwowbagger02Оценок пока нет
- Steady State FlowДокумент12 страницSteady State FlowNH SyzlnОценок пока нет
- Future of Nuclear Powers (Tamil)Документ125 страницFuture of Nuclear Powers (Tamil)Chand CheОценок пока нет