Вам также может понравиться
- Sci MathДокумент4 страницыSci MathPamela McmahonОценок пока нет
- FeedbackДокумент11 страницFeedbackPamela McmahonОценок пока нет
- Isdb-T: Key FeaturesДокумент8 страницIsdb-T: Key FeaturesPamela McmahonОценок пока нет
- Communications NetworkДокумент2 страницыCommunications NetworkPamela McmahonОценок пока нет
- DerivationДокумент3 страницыDerivationPamela McmahonОценок пока нет
- AssignmentДокумент3 страницыAssignmentPamela McmahonОценок пока нет
- AM FM Interview QuestionsДокумент1 страницаAM FM Interview QuestionsPamela McmahonОценок пока нет
- Link Block DiagramДокумент4 страницыLink Block DiagramPamela McmahonОценок пока нет
- Biot Savart LawДокумент3 страницыBiot Savart LawPamela McmahonОценок пока нет
- History: Radio WavesДокумент3 страницыHistory: Radio WavesPamela McmahonОценок пока нет
- Finding DoryДокумент3 страницыFinding DoryPamela McmahonОценок пока нет
- Measuring RadiationДокумент1 страницаMeasuring RadiationPamela McmahonОценок пока нет
- Subic Telecom Vs SBMAДокумент5 страницSubic Telecom Vs SBMAPamela McmahonОценок пока нет
- Measuring RadiationДокумент1 страницаMeasuring RadiationPamela McmahonОценок пока нет
- EphemerisДокумент4 страницыEphemerisPamela McmahonОценок пока нет
- Thermal DevicesДокумент2 страницыThermal DevicesPamela McmahonОценок пока нет
- Sample For Project Study - reviSEDДокумент18 страницSample For Project Study - reviSEDFranz Albina100% (3)
- Contract As Per Civil Code of The PhilДокумент13 страницContract As Per Civil Code of The PhilPamela McmahonОценок пока нет
- Jacob's Never-Ending Quest for New HobbiesДокумент3 страницыJacob's Never-Ending Quest for New HobbiesRamona SecuОценок пока нет
- Annuity ProblemДокумент8 страницAnnuity ProblemPamela McmahonОценок пока нет
- Thermal DevicesДокумент2 страницыThermal DevicesPamela McmahonОценок пока нет
- Ae Internship PhilippinesДокумент1 страницаAe Internship PhilippinesPamela McmahonОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Service Manual Epson Lq-570, Lq-1070Документ135 страницService Manual Epson Lq-570, Lq-1070dangiojauОценок пока нет
- E24 - PT#033.0905Документ4 страницыE24 - PT#033.090512345673532Оценок пока нет
- EDA-31054FFJRA Series Datasheet20120221Документ12 страницEDA-31054FFJRA Series Datasheet20120221M8R-xf9b1g214Оценок пока нет
- Drift: User GuideДокумент32 страницыDrift: User Guidekhawar mukhtarОценок пока нет
- GAOTek SFP 202 PDFДокумент7 страницGAOTek SFP 202 PDFইমরানুল শহীদ আলভীОценок пока нет
- DCR Power Controllers For Ionpure Cedi ModulesДокумент2 страницыDCR Power Controllers For Ionpure Cedi ModulesArvind LodhiОценок пока нет
- Universal Synchronous Asynchronous Receive/Transmit USART: MSP430 Family USART Peripheral InterfaceДокумент52 страницыUniversal Synchronous Asynchronous Receive/Transmit USART: MSP430 Family USART Peripheral InterfaceEnrico W. FebriardyОценок пока нет
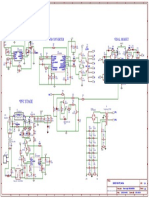
- Schematic SMPS-PFC Sheet-1 20190424001902 PDFДокумент1 страницаSchematic SMPS-PFC Sheet-1 20190424001902 PDFАлексей АндрияшОценок пока нет
- Aspirating Smoke Detector: Operating ManualДокумент90 страницAspirating Smoke Detector: Operating ManualRaduОценок пока нет
- CAN PROTOCOL OVERVIEWДокумент63 страницыCAN PROTOCOL OVERVIEWBijaya Rana67% (3)
- Cat Dcs Sis Controller CSSISImageServletДокумент2 страницыCat Dcs Sis Controller CSSISImageServletAlfonso Alberto ArguelloОценок пока нет
- Bumi Biru Terraces Project Details and AmenitiesДокумент13 страницBumi Biru Terraces Project Details and AmenitiesVicky YusmanОценок пока нет
- Practical 5 Aim: Low Pass Average Filter and High Pass Filter Used On An Image With Gaussian NoiseДокумент1 страницаPractical 5 Aim: Low Pass Average Filter and High Pass Filter Used On An Image With Gaussian Noisevaibhavmakkar54Оценок пока нет
- How to prepare firmwareДокумент5 страницHow to prepare firmwareiancourtОценок пока нет
- Audible Noise ReductionДокумент4 страницыAudible Noise ReductionGaurav SharmaОценок пока нет
- Service Manual: LCD Color TelevisionДокумент66 страницService Manual: LCD Color TelevisionFareeha GhaniОценок пока нет
- 2007 KJ Liberty ManualДокумент417 страниц2007 KJ Liberty Manualcarlos100% (1)
- Colour TV Service Manual CT-14HS9Документ15 страницColour TV Service Manual CT-14HS9Annam NoobОценок пока нет
- Configuración de Fase Kubota j119Документ1 страницаConfiguración de Fase Kubota j119Julio MendozaОценок пока нет
- Unified Power Flow Controller (Phasor Type) : LibraryДокумент22 страницыUnified Power Flow Controller (Phasor Type) : LibrarypavanОценок пока нет
- AR-Raspberry Pi Slides CompleteДокумент21 страницаAR-Raspberry Pi Slides CompleteRagini GuptaОценок пока нет
- PL Hu SL CS SKДокумент137 страницPL Hu SL CS SKNegrutaMiauОценок пока нет
- 579 1006Документ24 страницы579 1006Richard Batronel GamboaОценок пока нет
- IAE 102 Information Sheet 3 SERIES AND PARALLEL CIRCUITДокумент7 страницIAE 102 Information Sheet 3 SERIES AND PARALLEL CIRCUITChristian Lumactod EmbolodeОценок пока нет
- Switch GearДокумент6 страницSwitch GearHari Krishna.MОценок пока нет
- Dual Operational Amplifier: General Description Package OutlineДокумент4 страницыDual Operational Amplifier: General Description Package OutlineClaudio AzevedoОценок пока нет
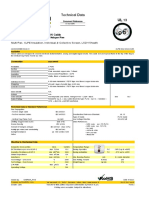
- UL13 Instrumentation Cable Technical DataДокумент1 страницаUL13 Instrumentation Cable Technical DataMario MejiaОценок пока нет
- Cba 3000Документ98 страницCba 3000AlejandroОценок пока нет
- Trusted System Training Manual (Rev. 3 - 0)Документ328 страницTrusted System Training Manual (Rev. 3 - 0)Mijail David Felix NarvaezОценок пока нет
- Operating Systems - CS604 Power Point Slides Lecture 12Документ24 страницыOperating Systems - CS604 Power Point Slides Lecture 12bilo044Оценок пока нет