Вам также может понравиться
- Calculations Reference ManualДокумент122 страницыCalculations Reference ManualjujuroyaleОценок пока нет
- Jacket Launching AnalysisДокумент7 страницJacket Launching Analysisiw2fualОценок пока нет
- Wajac StandardДокумент22 страницыWajac StandardajayОценок пока нет
- Akordet Baze Per KitareДокумент4 страницыAkordet Baze Per KitareMemo Mahmut Marku100% (2)
- 04 OnScreen B2plus Module 4Документ10 страниц04 OnScreen B2plus Module 4IrenaNikolovska100% (1)
- 05 OnScreen B1plus Module 5Документ6 страниц05 OnScreen B1plus Module 5Dzima Simona100% (1)
- 05 OnScreen B2 Module 5Документ11 страниц05 OnScreen B2 Module 5vojsavaОценок пока нет
- Guide Per Maturen Shteterore PDFДокумент204 страницыGuide Per Maturen Shteterore PDFEnea HysaОценок пока нет
- b2 TESTДокумент5 страницb2 TESTAnonymous QkFRr4g100% (1)
- Rotary Cement Kiln Simulator (RoCKS) PDFДокумент18 страницRotary Cement Kiln Simulator (RoCKS) PDFjoseph ayronОценок пока нет
- Anglisht PortofolioДокумент1 страницаAnglisht PortofolioBlerina Alla Shevroja50% (2)
- Celesi Test Tremujori I Pare MatematikeДокумент1 страницаCelesi Test Tremujori I Pare Matematikejora100% (2)
- Anglisht 2Документ8 страницAnglisht 2nabb8Оценок пока нет
- Libri Mesuesit-LETERSIA 10Документ8 страницLibri Mesuesit-LETERSIA 10Lorenc Angjo100% (1)
- Vision A2 KeyДокумент1 страницаVision A2 Keygaming clan100% (1)
- Formula Trigonometrike2 PDFДокумент2 страницыFormula Trigonometrike2 PDFAlbana Veliu100% (2)
- Anglisht Gjuhe e Parë - Varianti AДокумент8 страницAnglisht Gjuhe e Parë - Varianti ABledi AlizotiОценок пока нет
- Biologji 11Документ2 страницыBiologji 11sheila0% (1)
- 04 OnScreen B2 Module 4Документ10 страниц04 OnScreen B2 Module 4vojsavaОценок пока нет
- OnScreen B2 Mod 8Документ6 страницOnScreen B2 Mod 8Halyna KravetsОценок пока нет
- Funksionet e PerberaДокумент4 страницыFunksionet e PerberaunazaОценок пока нет
- Skema Anglisht Detyrim 2016Документ3 страницыSkema Anglisht Detyrim 2016Orges BallaОценок пока нет
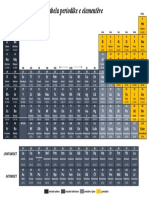
- Tabela Periodike e Elementëve: LantanidetДокумент1 страницаTabela Periodike e Elementëve: LantanidetRegan100% (2)
- Cennik Express Publishing 2020Документ99 страницCennik Express Publishing 2020GosiaОценок пока нет
- 1st Unit Test - Class 6Документ2 страницы1st Unit Test - Class 6Pankaj ChetryОценок пока нет
- Anglu 151Документ2 страницыAnglu 151EgleОценок пока нет
- Test KL 7 3 Mujori I 3 Grupi BДокумент2 страницыTest KL 7 3 Mujori I 3 Grupi BDorina100% (2)
- Detyra Nga Matricat Dhe Determinatat - UshtrimeДокумент37 страницDetyra Nga Matricat Dhe Determinatat - UshtrimeAcidi Lawrencium83% (24)
- Test Kl.9.a.tremujori 3.spark 4Документ4 страницыTest Kl.9.a.tremujori 3.spark 4Dhimitraq VeshoОценок пока нет
- Biol 243 Tert Assignment w19Документ3 страницыBiol 243 Tert Assignment w19rtm haiderОценок пока нет
- Prometeu I MberthyerДокумент2 страницыPrometeu I Mberthyerhduehuheude100% (2)
- On Screen B1 2 XlsДокумент20 страницOn Screen B1 2 XlsAntea0% (1)
- The Cinderella GasДокумент2 страницыThe Cinderella GasMaría Lukavetska100% (1)
- Test Kl.9.a.tremujori 1.spark 4Документ4 страницыTest Kl.9.a.tremujori 1.spark 4kristian toksaОценок пока нет
- Mesim Per KriperatДокумент4 страницыMesim Per KriperatPopTesroОценок пока нет
- Test KL 8 3 Mujori I 2 Grupi AДокумент2 страницыTest KL 8 3 Mujori I 2 Grupi AIris Hyseni100% (1)
- Albanian Traditional CostumesДокумент7 страницAlbanian Traditional CostumesLorenc SakoОценок пока нет
- Test KL 8 3 Mujori I 3 Grupi AДокумент2 страницыTest KL 8 3 Mujori I 3 Grupi AIris Hyseni100% (3)
- Provim Periudha 1 Klasa 5 BESAДокумент3 страницыProvim Periudha 1 Klasa 5 BESAANGLISHT100% (1)
- Test AnglishtДокумент10 страницTest AnglishtXhoiZekajОценок пока нет
- Sporti Dhe Argetimi Projekt AnglishtДокумент11 страницSporti Dhe Argetimi Projekt Anglishtromarjo sulkoОценок пока нет
- Fizik Teknike (Detyre Kursi 2) Andi MyrtollariДокумент10 страницFizik Teknike (Detyre Kursi 2) Andi MyrtollariFeritОценок пока нет
- Blue Light Blue Color Blocks Flight Attendant CVДокумент1 страницаBlue Light Blue Color Blocks Flight Attendant CVVishwa vsОценок пока нет
- Preview Ahmet AKİ, Sinan KOŞAK, Salim GÜR Physics Mechanics Zambak PDFДокумент20 страницPreview Ahmet AKİ, Sinan KOŞAK, Salim GÜR Physics Mechanics Zambak PDFdsy ftrniОценок пока нет
- Test KL 7 3 Mujori I 2 Grupi AДокумент2 страницыTest KL 7 3 Mujori I 2 Grupi ADorinaОценок пока нет
- Test Smiles 3 Tremujori I Pare GR AДокумент4 страницыTest Smiles 3 Tremujori I Pare GR AKurse Anglisht Kleoarti100% (1)
- Test 3 B Kls 8Документ3 страницыTest 3 B Kls 8Albana RamaОценок пока нет
- 2006 Yamaha R6 Owner's ManualДокумент116 страниц2006 Yamaha R6 Owner's ManualThomas ZoumbouliasОценок пока нет
- Upstream Pre B1 Test 4BДокумент4 страницыUpstream Pre B1 Test 4BBiljana NestorovskaОценок пока нет
- Libri I Mesuesit Anglisht 3 4Документ85 страницLibri I Mesuesit Anglisht 3 4Kastriot Avdia75% (4)
- Atlas I Anatomise Se NjeriutДокумент246 страницAtlas I Anatomise Se NjeriutFarko DurmoОценок пока нет
- The Role of TQM Models in The Sustainable Tourism DevelopmentДокумент6 страницThe Role of TQM Models in The Sustainable Tourism DevelopmentInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Spark 1 Tremujori I Dyte GR BДокумент2 страницыSpark 1 Tremujori I Dyte GR BDorina43% (7)
- Plani I Orëve Të Konsultimeve Për Provimet e Lirimit Të Klasave Të NëntaДокумент3 страницыPlani I Orëve Të Konsultimeve Për Provimet e Lirimit Të Klasave Të NëntaAlesiaОценок пока нет
- Test 3 A Kls 8Документ3 страницыTest 3 A Kls 8Albana RamaОценок пока нет
- Test Kl.9.a.tremujori 1.spark 4Документ4 страницыTest Kl.9.a.tremujori 1.spark 4NDRICIM50% (2)
- Arithmancy CalculatorДокумент4 страницыArithmancy CalculatorAlmileeОценок пока нет
- Equalizer Design ExampleДокумент10 страницEqualizer Design ExamplehaimanhptitОценок пока нет
- Assignment No 1,2,3,4Документ9 страницAssignment No 1,2,3,4Hadia Azhar2558Оценок пока нет
- Área de Ingeniería Agroforestal: 2 T/M B A I I I 3Документ14 страницÁrea de Ingeniería Agroforestal: 2 T/M B A I I I 3MV C CharlesОценок пока нет
- Homework 2 SolutionДокумент13 страницHomework 2 SolutionJeff HardyОценок пока нет
- CodesДокумент36 страницCodesPravat SatpathyОценок пока нет
- Submission of Term Work': Subject - CpmsДокумент25 страницSubmission of Term Work': Subject - CpmsPrakharОценок пока нет
- Function: %gas Constant (CM 3 Atm) / (Mol K) %critical Temperature in Kelvin % Critical Pressure in AtmДокумент5 страницFunction: %gas Constant (CM 3 Atm) / (Mol K) %critical Temperature in Kelvin % Critical Pressure in AtmRohit KalyanОценок пока нет
- Universiti Teknologi Malaysia: Title of ExperimentДокумент20 страницUniversiti Teknologi Malaysia: Title of ExperimentKhairil IkramОценок пока нет
- Science P5 Revision Unit 19Документ6 страницScience P5 Revision Unit 19starsschooljktОценок пока нет
- Investigation On Electrical Transport and Dielectric Relaxation Mechanism in TbCrO3 Peroskite Orthochromite 2023 2Документ19 страницInvestigation On Electrical Transport and Dielectric Relaxation Mechanism in TbCrO3 Peroskite Orthochromite 2023 2Best WishesОценок пока нет
- Lecture 8 - Thermodynamic Potentials, Gibbs Free Energy, Etc-1Документ61 страницаLecture 8 - Thermodynamic Potentials, Gibbs Free Energy, Etc-1BENОценок пока нет
- 1 s2.0 S099775462200108X MainДокумент11 страниц1 s2.0 S099775462200108X MainMario Alberto Sanchez RosasОценок пока нет
- +M - MДокумент6 страниц+M - MRitesh SonawaneОценок пока нет
- Finding Extrasolar Planets V4Документ4 страницыFinding Extrasolar Planets V4orfanakОценок пока нет
- PhysicsДокумент5 страницPhysicsFamia FarazОценок пока нет
- Stress Analysis Report PALLET 1255Документ19 страницStress Analysis Report PALLET 1255andresОценок пока нет
- Chemistry Books: S.No Authors /publisher Name of Books RemarksДокумент13 страницChemistry Books: S.No Authors /publisher Name of Books RemarksAnonymous FckLmgFyОценок пока нет
- SCH 3u-HomeworkДокумент5 страницSCH 3u-HomeworkLutfiana Miftahul JannahОценок пока нет
- Accidental Eccentricity For Response Spectrum AnalysisДокумент1 страницаAccidental Eccentricity For Response Spectrum AnalysisKhaled Abdel SalamОценок пока нет
- Presentasi Elmag Garis IntegralДокумент13 страницPresentasi Elmag Garis IntegralMuhammad Lutfi HidayatОценок пока нет
- Kallam Haranadhareddy Institute of Technology: Department of Mechanical EngineeringДокумент2 страницыKallam Haranadhareddy Institute of Technology: Department of Mechanical EngineeringsuswagatОценок пока нет
- Reinforcement Bond Capacity: Jewell, R. A. (1990) - Gcotechnique 40, No. 3,51Q8Документ6 страницReinforcement Bond Capacity: Jewell, R. A. (1990) - Gcotechnique 40, No. 3,51Q8Saleh HassanОценок пока нет
- Short Circuit CapacityДокумент6 страницShort Circuit Capacityraj_sh242001Оценок пока нет
- FMM Anna University Unit IV QuestionsДокумент4 страницыFMM Anna University Unit IV QuestionsUma MaheshОценок пока нет
- SRU SCHEDULE AND ACOUSTIC SELECTION Rev 00 16-05-2016Документ18 страницSRU SCHEDULE AND ACOUSTIC SELECTION Rev 00 16-05-2016AslamОценок пока нет
- Shaft TorsionДокумент2 страницыShaft Torsionindra purnamaОценок пока нет
- E4pa NДокумент8 страницE4pa NSaturnhauiОценок пока нет
- Mcqs From Past Papers Physics All in One 2nd YearДокумент35 страницMcqs From Past Papers Physics All in One 2nd YearIrtaza Akram50% (2)
- KZ2 Diodo ZennerДокумент4 страницыKZ2 Diodo ZennerADSPPAОценок пока нет
- Applied Physics Assignment 1Документ9 страницApplied Physics Assignment 1areejОценок пока нет
- PHYSICS101Документ23 страницыPHYSICS101Renzo L. MagatОценок пока нет
- Unit - I: Sri Vidya College of Engineering & Technology Oed - Question Bank - Unit - 1Документ6 страницUnit - I: Sri Vidya College of Engineering & Technology Oed - Question Bank - Unit - 1Jai RamОценок пока нет