Академический Документы
Профессиональный Документы
Культура Документы
Dcs Scada - Unidad 01
Загружено:
Antony Stip Flores TorresИсходное описание:
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Dcs Scada - Unidad 01
Загружено:
Antony Stip Flores TorresАвторское право:
Доступные форматы
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Contenido
CAPITULO I INTRODUCCIN .......................................................................................................... 2
1.
Introduccin ...................................................................................................................... 2
2.
Evolucin de la automatizacin industrial ........................................................................ 2
3.
Estructura general de un sistema de control .................................................................... 3
3.1.
Control centralizado ...................................................................................................... 4
3.2.
Control centralizado multicapa ..................................................................................... 4
3.2.1.
Requisitos de un sistema SCADA ............................................................................... 5
3.2.2.
Mdulos de un sistema SCADA ................................................................................. 6
3.3.
4.
Control Distribuido ........................................................................................................ 6
Caractersticas de las redes industriales ........................................................................... 7
4.1.
Jerarqua entre los niveles de comunicacin ................................................................ 8
4.2.
Topologas de las redes industriales ............................................................................. 9
4.3.
Control de acceso al medio ........................................................................................... 9
4.4.
Eleccin del tipo de medio fsico de la red .................................................................... 9
4.5.
La seguridad en una red .............................................................................................. 10
5.
Redes de Datos ................................................................................................................ 10
6.
Red de Planta .................................................................................................................. 11
6.1.
Requisitos en una red de planta.................................................................................. 11
7.
Red de Clula ................................................................................................................... 11
8.
Bus de campo (Field Bus) ................................................................................................ 11
8.1.
9.
Buses de campo existentes ......................................................................................... 13
Ethernet Industrial .......................................................................................................... 14
10.
Profibus ....................................................................................................................... 15
11.
FOUNDATION FIELDBUS .............................................................................................. 16
11.1.
Aspectos Fsicos ....................................................................................................... 16
11.2.
Qu lo hace diferente? .......................................................................................... 16
11.3.
Segmentos y redes H1 ............................................................................................. 17
11.4.
Cable ........................................................................................................................ 17
11.5.
Conexionado............................................................................................................ 18
11.6.
Alimentacin ........................................................................................................... 18
11.7.
Seal de comunicacin ............................................................................................ 18
11.8.
Topologas ............................................................................................................... 18
12.
HART ............................................................................................................................ 19
Sistemas Integrados de Control
(DCS & SCADA)
1-1
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
CAPITULO I
INTRODUCCIN
1. Introduccin
El desarrollo del control distribuido en la industria va de la mano con el de las comunicaciones.
Cada vez es ms necesario contar con dispositivos inteligentes para realizar el control o la
supervisin remota, tanto de procesos de fabricacin como de almacenamiento o distribucin.
Los sistemas o redes de comunicacin utilizados en entornos industriales se encuentran sometidos
a diferentes restricciones que condicionan su diseo y los diferencia de las redes de datos. El
desarrollo de los microprocesadores, microcontroladores y los controladores lgicos programables
dieron lugar a la aparicin del control distribuido. En este tipo de sistema, un PLC o un
microprocesador controla una o ms variables del sistema realizando un control directo de las
mismas. Estos equipos de control local se comunican con otros dispositivos de su mismo nivel y
con otros de nivel superior de supervisin.
En este curso describiremos sintticamente la evolucin en el tiempo de los sistemas de control
industrial hasta llegar a los controladores actuales. Luego de describirn las estructuras que pueden
tener estos sistemas de control y las caractersticas que deben tener los sistemas de supervisin.
Despus se vern los diferentes tipos de redes que se utilizan en instalaciones industriales se
describirn sus caractersticas y los detalles de sus implementaciones.
2. Evolucin de la automatizacin industrial
Los conceptos de automatizacin tienen sus orgenes con la revolucin industrial. Los elementos
mediante los cuales se llevaban a cabo las decisiones de control eran elementos mecnicos y
electromagnticos (motores, rels, temporizadores, contadores). Esto tena el problema que los
tableros de control podan llegar a tener grandes tamaos segn el proceso de automatizacin se
hacia ms complejo.
En los aos 50 con la aparicin de la electrnica comienzan a utilizarse los semiconductores con los
que se reduce el tamao de los armarios elctricos y se reduce el nmero de averas por desgaste
de componentes. Aunque esto resultaba mucho ms amigable presentaba un problema de falta de
flexibilidad, ya que un sistema de control slo sirve para una aplicacin especfica y no es
reutilizable.
Bedford associates desarroll un prototipo de controlador industrial, el cual puede ser considerado
como el primer PLC.
Los primeros PLCs se usaron para controlar procesos secuenciales (cadenas de montaje, transporte,
etc.). El problema que presentaba era que su memoria era cableada, por lo que la reutilizacin era
posible pero costosa.
A principios de los 70 aparece el microprocesador y con las primeras computadoras digitales se
empezaron a implementar memorias semiconductoras eliminando las memorias cableadas aparte
que brindaban al sistema mayor flexibilidad por la facilidad de programacin. En esos aos la
tecnologa de microprocesadores todava no era utilizada en la industria por su falta de robustez,
dificultad de conexin a equipos mecnicos y dificultad de programacin.
A mediados de los 70 los autmatas incorporan el microprocesador y las memorias
semiconductoras lo que permite programar sin necesidad de recablear (aumenta la flexibilidad).
Adems permiten realizar clculos matemticos y comunicacin con una computadora central
(computadora encargada de controlar la planta enviando rdenes a los autmatas que gobiernan
Sistemas Integrados de Control
(DCS & SCADA)
1-2
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
cada proceso). Junto con esto aparecen los primeros DCS (sistemas de control distribuido) que eran
controladores lgicos al igual que los PLCs solo que estos en el principio dominaban el reino del
control de variables analgicas. De esta manera los sistemas DCS trabajaban a la par de los
sistemas separados de PLC para control discreto de variables on/off.
Hacia finales de los 70 aparecen mejoras en los autmatas dndoles a estos:
Mayor memoria
Capacidad de gobernar lazos de control
Ms tipos de E/S (conexin ms flexible de sensores/actuadores)
Lenguajes de programacin ms potentes
Comunicaciones ms potentes.
En los aos 80 se contina con las mejoras siendo algunas de estas:
Mayor velocidad de proceso
Dimensiones ms reducidas
Tcnicas de control ms complejas (PID, inteligente, fuzzy).
Mltiples lenguajes (contactos, lista de instrucciones, GRAFCET, etc.)
En los aos 90 cuando los sistemas de control basados en computadora hicieron su aparicin en la
escena de la automatizacin industrial, los partidarios de estos sistemas ms poderosos y abiertos
afirmaban que dichos sistemas podran llegar a suplantar a los controladores lgicos programables
(PLCs) y hasta los sistemas de control distribuido (DCSs) en numerosas aplicaciones. La
computadora tena mucho que ofrecer, pero no suplantara las plataformas ya probadas de control
industrial. La computadora era la mejor opcin a la hora de integrar funcionalidad avanzada, como
puede ser conectividad de base de datos, integracin, control analgico y simulacin basada en
Web, comunicacin de datos con terceros. El problema con el control basado en computadora ha
sido siempre el control. Las PCs que corren en sistemas operativos estndares con hardware comn
resultan demasiado frgiles como para brindar un control industrial confiable.
El resultado de todas estas innovaciones fue la aparicin de controladores hbridos que permiten el
manejo de variables analgicas y digitales, en conjunto con caractersticas como procesador de
punto flotante para clculos personales, servidor Web interactivo embebido que facilita las tareas
de control y monitoreo, flash compacto y removible para la recoleccin y registro de datos, puertos
seriales mltiples y conexionado mediante buses de campo para la comunicacin con terceros.
En la actualidad se tiene disponible una gran variedad de autmatas hbridos compactos, sencillos y
modulares para distintos tipos de aplicaciones. Presentan grandes posibilidades de ampliacin y
con una tendencia hacia una evolucin continua de los sistemas de comunicacin, constituyendo
redes de autmatas que permiten implementaciones ms complejas y seguras. Las nuevas
caractersticas de los sistemas de automatizacin apuntan a incorporar caractersticas de los
sistemas distribuidos como:
Escalabilidad
Apertura
Concurrencia
Tolerancia a fallos
Transparencia
3. Estructura general de un sistema de control
En la figura 1 se muestra en forma clara la estructura de control implementadas normalmente en la
industria.
En la figura 1 se pueden ver dos reas bien definidas: Una, la parte operativa y otra la parte de
control.
Sistemas Integrados de Control
(DCS & SCADA)
1-3
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Parte Operativa
Parte Control
Preaccionadores
Actuadores
Dispositivo ce
Control (PLC)
Sensores
Proceso
Comunicaciones
Dilogo
Figura 1. Estructura de control normal
En la parte operativa tenemos los dispositivos de hardware y software que brindan la informacin
necesaria para llevar a cabo las operaciones de planta requeridas, con una interfaz amigable y
entendible para el operador.
En la parte de control encontramos dispositivos de control (PLCs, PCs industriales) que permiten
llevar a cabo las acciones de control en conjunto con los actuadores. Entre todos estos dispositivos
hay comunicacin vertical (desde la parte de control hacia la operativa y viceversa) y
comunicaciones horizontales (entre distintos dispositivos de control).
A continuacin se describen las arquitecturas de control industrial ms conocidas. No son las
nicas.
3.1. Control centralizado
En la figura 2 se puede ver la estructura general del control centralizado.
Control Centralizado
Materia
Prima
Producto
Proceso A
Proceso B
Proceso C
Proceso D
Figura 2. Estructura general de control centralizado
Constituido por una computadora, una interfaz de proceso y una estacin de operador
(interfaz de operacin).
La principal ventaja es que su arquitectura facilita el flujo de informacin y se hace posible
que los objetivos de optimizacin global del proceso puedan ser alcanzados, pero tiene la
desventaja que depende de la fiabilidad de la computadora. Para solucionar este problema
se aplica redundancia.
3.2. Control centralizado multicapa
En la figura 3 se puede ver la estructura general del control centralizado multicapa.
A partir de esta arquitectura de control aparece el concepto de SCADA que viene de las
siglas Supervisory Control And Data Adquisition, es decir Adquisicin de datos y control
Sistemas Integrados de Control
(DCS & SCADA)
1-4
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
de supervisin. Se trata de una aplicacin de software especialmente diseada para
funcionar sobre computadoras en el control de la produccin, proporcionando
comunicacin con los dispositivos de campo (controladores autnomos, PLCs, etc.) y
controlando el proceso de forma automtica desde la pantalla de la computadora. Adems
provee de toda la informacin que se genera en el proceso productivo a diversos usuarios,
tanto del mismo nivel como de niveles superiores dentro de la empresa como: control de
calidad, supervisin, mantenimiento, etc.
Control de Supervisin
Materia
Prima
SCADA
Dispositivo
de control
Dispositivo
de control
Dispositivo
de control
Dispositivo
de control
Proceso A
Proceso B
Proceso C
Proceso D
Producto
Figura 3. Estructura general de control centralizado multicapa
En este tipo de sistemas usualmente existe una computadora, que efecta tareas de
supervisin y gestin de alarmas, as como tratamiento de datos y control de procesos. La
comunicacin se realiza mediante buses especiales o por medio de redes de rea local
(redes LAN). Todo esto se ejecuta normalmente en tiempo real y estn diseados para dar
al operador de planta la posibilidad de supervisar y controlar dichos procesos. Los
elementos de proceso del sistema de control pueden utilizar una implementacin estndar
en tiempo real para la comunicacin entre objetos a travs de redes (por ejemplo CORBA).
Los programas necesarios y en su caso el hardware adicional que se necesite, se denomina
en general sistema SCADA.
Un sistema SCADA ofrece las siguientes caractersticas:
Posibilidad de crear paneles de alarma, que exigen la presencia del operador para
reconocer una parada o situacin de alarma, con registro de incidencias
Generacin de datos histricos de seales de planta, que pueden ser volcados para su
proceso sobre una hoja de clculo.
Ejecucin de programas, que modifican la ley de control o incluso anular o modificar las
tareas asociadas al autmata, bajo ciertas condiciones.
Posibilidad de programacin numrica, que permite realizar clculos aritmticos de
elevada resolucin.
Con estas caractersticas se pueden desarrollar aplicaciones para computadoras con
capturas de datos, anlisis de seales, presentaciones en pantalla, envo de resultados a
disco e impresora, etc.
Adems, todas estas acciones se llevan a cabo mediante un paquete de funciones que
incluye zonas de programacin en un lenguaje de uso general (como C, Pascal, Basic, otros),
lo cual brinda una potencia muy elevada y una gran versatilidad. Algunos sistemas SCADA
ofrecen libreras de funciones para lenguajes de uso general que permiten personalizar de
manera muy amplia la aplicacin que desee realizarse con dicho SCADA.
3.2.1. Requisitos de un sistema SCADA
Un sistema SCADA debe cumplir varios objetivos para que su instalacin sea
perfectamente aprovechada:
Sistemas Integrados de Control
(DCS & SCADA)
1-5
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Deben ser sistemas de arquitectura abierta, capaces de crecer o adaptarse
segn las necesidades cambiantes de la empresa.
Deben comunicarse con total facilidad y de forma transparente al usuario con el
equipo de planta y con el resto de la empresa (redes locales y de gestin).
Deben ser programas sencillos de instalar, sin excesivas exigencias de hardware
y fciles de utilizar con interfaces de usuario amigables.
3.2.2. Mdulos de un sistema SCADA
Los mdulos o bloques de software que permiten realizar las actividades de
adquisicin, supervisin y control en un sistema SCADA son los siguientes:
Configuracin: Permite al usuario definir el entorno de trabajo de su sistema
SCADA, adaptndolo a la aplicacin particular que se desea desarrollar.
Interfaz grfico del operador: proporciona al operador las funciones de control
y supervisin de la planta. El proceso se representa mediante grficos
especiales almacenados en la computadora de proceso y generados desde el
editor incorporado en el sistema SCADA o importados desde otra aplicacin
durante la configuracin del paquete.
Mdulo de proceso: Ejecuta las acciones de mando preprogramadas a partir de
los valores actuales de variables ledas.
Gestin y archivo de datos: Se encarga del almacenamiento y procesado
ordenado de los datos de forma que otra aplicacin o dispositivo pueda tener
acceso a ellos.
Comunicaciones: Se encarga de la transferencia de informacin entre la planta
y la arquitectura hardware que soporta el sistema SCADA y entre sta y el resto
de elementos informticos de gestin.
3.3. Control Distribuido
En la figura 4 se muestra un esquema de control distribuido, donde se puede observar que
es muy similar al control centralizado multicapa solo que aqu se comunican entre cada
controlador de proceso (comunicacin horizontal).
Control de Supervisin
Materia
Prima
Dispositivo
de control
Dispositivo
de control
Proceso A
Proceso B
Proceso C
Proceso D
Proceso A
Proceso B
Proceso C
Proceso D
Dispositivo
de control
Proceso A
Proceso B
Proceso C
Proceso D
Dispositivo
de control
Proceso A
Proceso B
Proceso C
Proceso D
Producto
Figura 4. Esquema de control distribuido
Sistemas Integrados de Control
(DCS & SCADA)
1-6
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Existen varias unidades de control que llevan a cabo las tareas. En caso de avera o
sobrecarga de trabajo, ser posible transferir todo o parte de las tareas a otras unidades.
La idea de poder hacer ignorar o no tener en cuenta a las unidades con problemas permite
evitar los bloqueos necesarios del sistema, (paradas de planta) pero por otra parte exige
que los diferentes controladores tengan una asignacin dinmica de las tareas y por lo tanto
se les va a exigir una gran capacidad de acceso a la comunicacin y de tratamiento de la
informacin.
La desventaja de esto es la disminucin de la velocidad de comunicacin debido a los
retardos, posibles desbordamientos en el procesamiento de datos en cada nivel y falta de
flujo de informacin directa entre controladores. Pero esto est siendo solucionado por la
aparicin de nuevas tecnologas de comunicacin de datos cada vez ms potentes.
Aqu vemos que tambin tenemos una unidad de control y supervisin (SCADA) que cumple
con las caractersticas antes mencionadas para el control centralizado multicapa.
A continuacin se muestra una tabla de comparacin sobre los aspectos principales de las
arquitecturas centralizadas y distribuidas:
TIPO DE ARQUITECTURA
Tipo de control
predominante
CENTRALIZADA
Supervisorio: Lazos de
control cerrados por el
operador.
Adicionalmente: control
secuencial y regulatorio.
Tipos de variables
reas de accin
Desacopladas
Areas geogrficamente
distribuidas
Remotas, PLCs
Unidades de adquisicin
de datos y control
Medios de
comunicacin
Base de datos
Radio, satlite, lneas
telefnicas, conexin
directa, LAN, WAN
Centralizada
DISTRIBUIDA
Regulatorio: Lazos de control
cerrados automticamente por el
sistema.
Adicionalmente: control
secuencial, batch, algoritmos
avanzados, etc.
Acopladas
rea de la planta
Controladores de lazo, PLCs,
DCSs
Reades de rea local, conexin
directa
Distribuida
A partir de lo expuesto se puede observar que la comunicacin entre controladores es un
aspecto fundamental para el funcionamiento de un sistema de control distribuido.
4. Caractersticas de las redes industriales
A continuacin se indican las principales caractersticas:
Entorno de funcionamiento hostil: las redes industriales deben ser lo suficientemente
robustas como para soportar golpes, atmsfera agresiva, radiaciones electromagnticas, ruido
elctrico y otras perturbaciones tpicas de la operacin en planta.
Restricciones temporales: las redes que comunican elementos de control con requisitos como
tiempo mximo de entrega de mensajes, esquemas de prioridades e ndices elevados de
disponibilidad.
Arquitecturas adecuadas: deben ser arquitecturas abiertas que permitan la interconexin de
elementos de distintos proveedores sin problemas.
Sistemas Integrados de Control
(DCS & SCADA)
1-7
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
4.1. Jerarqua entre los niveles de comunicacin
A continuacin se realizar una clasificacin jerrquica de las redes locales industriales
segn el entorno donde van a ser instaladas, la figura 5 muestra el esquema.
En el esquema piramidal, existen diferentes niveles de comunicacin, cada uno de ellos con
diferentes necesidades.
Se puede hablar en realidad de dos tipos de redes: redes de control y redes de datos. Las
redes de control estn ligadas a la parte baja de la pirmide mientras que las redes de datos
estn ms ligadas a las partes altas de la jerarqua.
En general, las redes de datos estn orientadas al transporte de grandes bloques de datos
que aparecen de forma espordica (baja carga) y con un gran ancho de banda para permitir
el envo rpido de una gran cantidad de datos. En contraste, las redes de control se
enfrentan a un trfico formado por un gran nmero de pequeos paquetes.
Las redes convencionales de datos podran emplearse para su uso como redes de control,
sin embargo, es evidente que no resultan adecuadas para las necesidades de este tipo de
aplicaciones. Por ejemplo, se sabe que una red Ethernet tiene una gran eficiencia cuando los
mensajes son largos y suficientemente espaciados en el tiempo. Sin embargo, la cantidad de
informacin que una red Ethernet es capaz de transportar cae bruscamente cuando se
utiliza por encima del 35% de la capacidad del canal si el tamao de los mensajes es
pequeo.
En las redes de control es habitual encontrar trfico de datos pequeos pero con
restricciones de envo y recepcin de dichos datos en tiempo real. Aqu el trfico de la red
depende directamente de eventos externos que estn siendo controlados por los diferentes
nodos que la componen. A menudo varios nodos necesitan enviar informacin
simultneamente en funcin de uno o mas eventos externos. Este hecho, junto con el gran
nmero de nodos que suelen estar presentes, implica la existencia de periodos frecuentes
en los que muchas estaciones envan pequeos paquetes de informacin.
Por todas estas razones, es necesario disear una arquitectura de red acorde a las
caractersticas particulares de este tipo de trfico. En el diseo se deber tener en cuenta
aspectos como los tipos de protocolos utilizados, la interoperabilidad, la topologa y la
facilidad de administracin. Deben usarse protocolos abiertos, disponibles por toda la
comunidad de fabricantes y usuarios. Este aspecto es bsico para conseguir que equipos de
diferentes fabricantes puedan trabajar en conjunto en una misma red. Tambin juega un
papel fundamental el tipo de informacin que viajar por la red. En las redes de datos esta
informacin consiste bsicamente en datos de usuario y en algunas ocasiones informacin
para la administracin y el mantenimiento de la propia red. En una red de control, esta
eleccin es menos clara ya que el funcionamiento correcto de la red es vital.
Pueden distinguirse dos tipo de redes segn la informacin que transporten: redes basadas
en comandos y redes basadas en estado. En las redes basadas en comandos, la informacin
consiste en una orden con la que un nodo controla el funcionamiento de otro. El principal
problema radica en que si se dispone de un amplio conjunto de nodos, habr un aumento
exponencial del nmero de posibles comandos y esto generar una sobrecarga en el
procesamiento. En las redes orientadas a estado las cosas son ms sencillas. En este caso, la
funcionalidad de un nodo no depende de ningn otro. Cada nodo enviar mensajes en los
que indicar a los dems su estado actual. Los nodos que reciban estos mensajes
modificarn su estado en funcin de la nueva informacin. Existen implementaciones que
combinan ambos mtodos.
Sistemas Integrados de Control
(DCS & SCADA)
1-8
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
4.2. Topologas de las redes industriales
La topologa de las redes de control puede ser cualquiera de las topologas clsicas de las
redes de datos. Cada una de ellas con sus propias ventajas y desventajas. Cualquiera puede
satisfacer las necesidades de cableado, prestaciones y costo de algn tipo de aplicacin. La
eleccin est determinada fundamentalmente por el control de acceso al medio y el tipo de
medio que se utiliza. El conjunto formado por el medio, el control de acceso y la topologa
afectan prcticamente a cualquier otro aspecto de la red de control: costo, facilidad de
instalacin, fiabilidad, prestaciones, facilidad de mantenimiento y expansin.
La seleccin de la topologa suele hacerse basndose en los requisitos especficos de cada
sistema en cuanto a costo de instalacin y tolerancia a fallos. Muchas redes de control
permiten el uso de distintas topologas.
4.3. Control de acceso al medio
El control de acceso al medio es vital. Despus de elegir una topologa, es necesario definir
como acceder cada nodo a la red. El objetivo es reducir las colisiones (idealmente
eliminarlas) entre los paquetes de datos y reducir el tiempo que tarda un nodo en ganar el
acceso al medio y comenzar a transmitir el paquete. En otras palabras, maximizar la
eficiencia de la red y reducir el retardo de acceso al medio. Este ltimo parmetro es el
factor principal a la hora de determinar si una red sirve para aplicaciones en tiempo real o
no.
El direccionamiento de los nodos es otro de los aspectos clave. En una red de control, la
informacin puede ser originada y/o recibida por cualquier nodo. La forma en que se
direccionen los paquetes de informacin afectar de forma importante a la eficiencia y la
fiabilidad global de la red. Se pueden distinguir tres tipos de direccionamiento:
a) Unicast: el paquete es enviado a un nico nodo de destino.
b) Multicast: El paquete es enviado a un grupo de nodos simultneamente
c) Broadcast: El paquete es enviado a todos los nodos de la red simultneamente.
El direccionamiento broadcast presenta la ventaja de su sencillez. Es adecuado para redes
basadas en informacin de estado. Cada nodo informa a todos los dems de cual es su
estado actual. El principal inconveniente es que los nodos pueden tener que procesar
paquetes que no les afecten directamente. Los esquemas de direccionamiento unicast y
multicast son ms eficientes y facilitan operaciones como el acuse de recibo y el renvo
estas caractersticas aumentan la fiabilidad del sistema.
En redes de control, es muy comn encontrar esquemas de direccionamiento del tipo
maestro-esclavo. Este tipo de esquemas permite plasmar ciertos aspectos jerrquicos del
control de forma sencilla a la vez que simplifica el funcionamiento de la red y por tanto baja
los costos de la interfaz fsica.
4.4. Eleccin del tipo de medio fsico de la red
La eleccin del medio fsico afecta a aspectos tales como la velocidad de transmisin,
distancia entre nodos y a la fiabilidad. En muchas redes de control se recurre a una mezcla
de distintos medios fsicos para cumplir con los requisitos de diferentes secciones al menor
costo posible. Se incorporarn equipos como enrutadores, puentes o repetidores necesarios
para asegurar el objetivo de una comunicacin punto a punto transparente al menor costo
posible y sin que la integracin conlleve a una disminucin de las prestaciones de la red.
El control en tiempo real demanda de las redes de control buenos tiempos de respuesta
(baja latencia). Por ejemplo, el retardo entre la deteccin de un objeto en una lnea de
Sistemas Integrados de Control
(DCS & SCADA)
1-9
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
montaje de alta velocidad y el arranque de una mquina de pintado puede ser del orden de
decenas de milisegundos. En general, las redes de datos no necesitan una respuesta en
tiempo real cuando envan grandes conjuntos de datos a travs de la red. El control de
acceso al medio y el nmero de capas implementadas en la arquitectura de red resultan
determinantes a la hora de fijar la velocidad de respuesta de la red. La implementacin de
las siete capas del modelo OSI implica una mayor potencia de proceso por la sobrecarga que
conlleva con respecto a un sistema ms sencillo que por ejemplo slo implementase las dos
primeras capas. En ocasiones, los beneficios que aportan las capas adicionales compensan la
sobrecarga adicional (que implica un mayor costo), sobre todo a medida que aumenta la
funcionalidad demandada de la red y mejora la tecnologa disponible. Cuando la velocidad
es el factor esencial, como ocurre con muchos buses de campo, el modelo puede aligerarse
ya que en la mayor parte de este tipo de aplicaciones las capas de red, transporte, sesin y
presentacin no son necesarias.
Otra forma de favorecer un tiempo de respuesta pequeo es la capacidad para establecer
mensajes con diferentes prioridades, de forma que los mensajes de alta prioridad (como por
ejemplo una alarma) tengan ms facilidad para acceder al medio.
4.5. La seguridad en una red
Finalmente hay que destacar el papel que juega la seguridad de la red. Podemos destacar
dos niveles diferentes de seguridad. Por una parte la proteccin frente a accesos no
autorizados a la red y por otra parte la proteccin frente a fallos del sistema y averas.
El primer problema es el menos grave, ya que la mayor parte de las redes de control no
estn conectadas a redes externas a la fbrica. Adems, en la prctica, la mayor parte de las
veces, las redes pertenecientes a los escalones ms bajos de la pirmide no estn
conectados con las redes de nivel superior dentro de la propia fbrica. En cualquier caso, los
mecanismos de proteccin son similares a los empleados en las redes de datos: claves de
usuario y autentificacin de los nodos de la red.
La proteccin frente a fallos juega un papel mucho ms importante, debido a que se debe
evitar a toda costa que este hecho afecte negativamente a la planta. Por ejemplo, los
sistemas de refrigeracin de una central nuclear no pueden bloquearse porque la interfaz
de comunicaciones de un nodo de la red falle. Para ello es fundamental que los nodos
puedan detectar si la red est funcionando correctamente o no y en caso de falla puedan
pasar a un modo de operacin que mantenga la planta en un punto seguro. Si el sistema es
crtico, se deben incluir equipos redundantes que remplacen al equipo que ha presentado la
falla de forma automtica. El monitoreo de la red y la capacidad de diagnstico representan
por lo tanto dos puntos bsicos de cualquier red de control.
La necesidad de buenas herramientas de mantenimiento y administracin de la red son
vitales. No slo por lo indicado anteriormente sino tambin porque en las redes de control
las operaciones de reconfiguracin y actualizacin son frecuentes.
5. Redes de Datos
La constituyen las redes de oficina que comunican los departamentos de contabilidad,
administracin, ventas, gestin de pedidos, almacn, red de planta. Generalmente estn basadas en
tecnologa Ethernet y conectadas a Internet a travs de un firewall para proteger la red interna de
un ataque desde el exterior. Brindan servicios de comunicacin como transferencia de archivos y
proceso de transacciones teniendo un gran volumen de informacin intercambiada y los tiempos de
respuesta no son tan crticos.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 10
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
6. Red de Planta
La funcin de esta capa es interconectar mdulos y clulas de fabricacin entre s y con
departamentos como diseo o planificacin. La informacin vinculada de esta capa es administrada
y controlada por aplicaciones SCADA ya sea en forma centralizada o distribuida segn la
arquitectura implementada. En estas redes el trfico de datos es muy variable desde mensajes
cortos de rdenes de ejecucin hasta mensajes interactivos de terminales de operadores. Al
protocolo usado en estas redes se les denomina MAP (Manufacturing Automation Protocol). En la
prctica se emplean soluciones clsicas Ethernet o Token Ring, con caractersticas especiales.
6.1. Requisitos en una red de planta
A continuacin se mencionan los requisitos que se debe tener en una red de planta:
Manejar mensajes de cualquier tamao
Gestin de errores de transmisin eficaces (detectar y corregir).
Cubrir reas extensas (puede llegar a varios kilmetros).
Poder gestionar mensajes con prioridades.
Amplio ancho de banda disponible.
7. Red de Clula
Sirven para interconectar dispositivos de control que operan en modo secuencial como por ejemplo
PLCs.
A continuacin se indican las caractersticas que deben brindar este tipo de redes:
Gestionar mensajes cortos eficientemente.
Capacidad de manejar trfico de eventos discretos.
Mecanismos de control de error (El protocolo de comunicaciones debe detectar y corregir
errores).
Posibilidad de transmitir mensajes prioritarios.
Bajo costo de instalacin y de conexin por nodo.
Recuperacin rpida ante eventos anormales en la red.
Alta disponibilidad.
En la prctica son redes de tamao pequeo (5 a 50 dispositivos) trabajando con redes propietarias
que resultan generalmente difciles de ampliar ms an cuando se dispone de dispositivos de
control de proveedores distintos. Se utilizan protocolos de comunicacin asncronos (orientados al
carcter) si los paquetes transferidos son del orden de Kbps y se usan protocolos de comunicacin
sncronos si los paquetes son de mayor tamao (Mbps). Con un trfico de mensajes cortos para
control y sincronizacin entre los dispositivos y en ocasiones con capacidades para transferencia de
archivos.
Los controladores actuales disponen de dispositivos configurables de manera que pueden
comunicarse con diferentes tipos de redes. Tambin existen dispositivos que permiten pasar de un
protocolo a otro sin problemas denominados gateways.
8. Bus de campo (Field Bus)
Un bus de campo es un trmino genrico que describe un conjunto de redes de comunicacin para
uso industrial cuyo objetivo es sustituir las conexiones punto a punto entre los elementos de campo
y el equipo de control a travs del tradicional lazo de corriente de 4-20 mA. Tpicamente son redes
digitales, bidireccionales, multipunto, montadas sobre un bus serie que conectan dispositivos de
campo como PLCs, transductores, sensores y actuadores. Cada dispositivo de campo incorpora
Sistemas Integrados de Control
(DCS & SCADA)
1 - 11
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
cierta capacidad de proceso que lo convierte en un dispositivo inteligente manteniendo siempre un
costo bajo. Cada uno de estos elementos ser capaz de ejecutar funciones simples de
autodiagnstico, control o mantenimiento, as como de comunicarse en forma bidireccional a
travs del bus.
El objetivo es remplazar los sistemas de control centralizados por redes de control distribuido con
las que se pueda mejorar la calidad del producto, reducir costos y mejorar la eficiencia. Para ello se
basa en que la informacin que envan y/o reciben los dispositivos de campo es digital lo que
resulta mucho mas preciso que si se recurre a mtodos analgicos. Adems cada dispositivo de
campo es un dispositivo inteligente y puede llevar a cabo funciones propias de control,
mantenimiento y diagnstico. De esta forma, cada nodo de la red puede informar en caso de
producirse una falla del dispositivo asociado y en general sobre cualquier anomala asociada al
dispositivo. Este monitoreo permite aumentar la eficiencia del sistema y reducir la cantidad de
horas de mantenimiento necesarias.
La principal ventaja que ofrecen los buses de campo y la que los hace ms atractivos a los usuarios
finales es la reduccin de costos. El ahorro proviene fundamentalmente de tres fuentes:
Ahorro en costos de instalacin
Ahorro en el costo de mantenimiento
Ahorros derivados de la mejora del funcionamiento del sistema
Una de las principales caractersticas de los buses de campo es una reduccin significativa en el
cableado necesario para el control de una instalacin. Cada clula de proceso slo requiere un cable
para la conexin de los diversos nodos. En comparacin con otros tipos de redes, dispone de
herramientas de administracin del bus que permiten la reduccin del nmero de horas necesarias
para la instalacin y puesta en marcha. El hecho de que los buses de campo sean ms sencillos que
otras redes de uso industrial hace que las necesidades de mantenimiento de la red sean menores
de modo que la confiabilidad del sistema a largo plazo aumenta. Adems los buses de campo
permiten a los operadores monitorear todos los dispositivos que integran el sistema de tal manera
que permite interpretar fcilmente las interacciones entre ellos. De esta forma, la deteccin de las
fuentes de problemas en la planta y su correccin resulta mucho ms sencilla reduciendo de esta
manera los costos de mantenimiento y el tiempo de parada de la planta. Los buses de campo
ofrecen mayor flexibilidad al usuario en el diseo del sistema. Algunos algoritmos y procedimientos
de control utilizados tradicionalmente en los sistemas de control deban incluirse en los propios
algoritmos de control en cambio ahora estos algoritmos radican en los propios dispositivos de
campo simplificando el sistema de control y sus posibles ampliaciones.
Tambin hay que tener en cuenta que las prestaciones del sistema mejoran con el uso de la
tecnologa de los buses de campo debido a la simplificacin en la forma de obtener informacin de
la planta desde los distintos sensores. Las mediciones de los ltimos elementos de la red estn
disponibles para todos los dems dispositivos.
La simplificacin en la obtencin de datos permitir el diseo de sistemas de control ms eficientes.
Con la tecnologa de los buses de campo, se permite la comunicacin bidireccional entre los
dispositivos de campo y los sistemas de control pero tambin entre los propios dispositivos de
campo. Otra ventaja de los buses de campo es que slo incluyen cuatro capas (Fsica, Enlace de
datos, Aplicacin, Usuario) y un conjunto de servicios de administracin. El usuario no tiene que
preocuparse de las capas de enlace o de aplicacin, slo necesita conocer cual es su funcionalidad.
Al usuario slo se le exige tener un conocimiento mnimo de los servicios de administracin de la
red ya que parte de la informacin generada por dichos servicios puede ser necesaria para la
reparacin de fallas en el sistema. De hecho el usuario slo debe preocuparse de la capa fsica y la
capa de usuario.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 12
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
8.1. Buses de campo existentes
Debido a la falta de estndares, diferentes empresas han desarrollado diferentes soluciones,
cada una de ellas con diferentes prestaciones y campos de aplicacin. En una primera
clasificacin podemos dividirlos en los siguientes grupos:
a) Buses de alta velocidad y baja funcionalidad
Diseados para integrar dispositivos simples como finales de carrera, fotoclulas, rels
y actuadores simples funcionando en aplicaciones de tiempo real y agrupados en una
pequea zona de la planta, tpicamente una mquina. Suelen especificar las capas fsica
y de enlace de datos del modelo OSI, es decir, seales fsicas y patrones de bits de las
tramas. Algunos ejemplos son:
CAN: Diseado originalmente para su aplicacin en vehculos
SDS: Bus para la integracin de sensores y actuadores, basado en CAN
ASI: Bus serie diseado por Siemens para la integracin de sensores y
actuadores.
b) Buses de alta velocidad y funcionalidad media
Se basan en el diseo de una capa de enlace para el envo eficiente de bloques de datos
de tamao medio. Estos mensajes permiten que el dispositivo tenga mayor
funcionalidad de modo que permite incluir aspectos como la configuracin, calibracin
o programacin del dispositivo. Son buses capaces de controlar dispositivos de campo
complejos de forma eficiente y a bajo costo. Normalmente incluyen la especificacin
completa de la capa de aplicacin, lo que significa que se dispone de funciones
utilizables desde programas basados en PCs para acceder, cambiar y controlar los
diversos dispositivos que constituyen el sistema. Algunos incluyen funciones estndar
para distintos tipos de dispositivos (perfiles) que facilitan la interoperabilidad de
dispositivos de distintos fabricantes. Algunos ejemplos son:
DEVICENET: Desarrollado por Allen-Bradley, utiliza como base el bus CAN e
incorpora una capa de aplicacin orientada a objetos.
LONWorks: Red desarrollada por Echelon.
BitBus: Red desarrollada por INTEL.
DIN MessBus: Estndar alemn de bus de instrumentacin, basado en
comunicacin RS-232
InterBus-S: Bus de campo alemn de uso comn en aplicaciones medias.
c) Buses de altas prestaciones
Son capaces de soportar comunicaciones a nivel de toda la factora en muy diversos
tipos de aplicaciones. Aunque se basan en buses de alta velocidad, algunos presentan
problemas debido a la sobrecarga necesaria para alcanzar las caractersticas
funcionales y de seguridad que se les exigen. La capa de aplicacin oferta un gran
nmero de servicios a la capa de usuario. Entre sus caractersticas incluyen:
Redes multi-maestro con redundancia.
Comunicacin maestro-esclavo segn el esquema pregunta-respuesta.
Recuperacin de datos desde el esclavo con un lmite mximo de tiempo.
Capacidad de direccionamiento unicast, multicast y broadcast.
Peticin de servicios a los esclavos basada en eventos.
Comunicacin de variables y bloques de datos orientados a objetos.
Descarga y ejecucin remota de programas.
Altos niveles de seguridad de la red, opcionalmente con procedimientos de
autentificacin.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 13
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Conjunto completo de funciones de administracin de red.
Algunos ejemplos son:
Profibus
FIP
Fieldbus Foundation
d) Buses para reas de seguridad intrnseca
Incluyen modificaciones en la capa fsica para cumplir con los requisitos especficos de
seguridad intrnseca en ambientes con atmsferas explosivas. La seguridad intrnseca
es un tipo de proteccin por la que el equipo en cuestin no tiene posibilidad alguna de
provocar una explosin en la atmsfera circundante. Un circuito elctrico o una parte
de un circuito tienen seguridad intrnseca cuando alguna chispa o efecto trmico en
este circuito producidos en las condiciones de prueba establecidas por un estndar
(dentro del cual figuran las condiciones de operacin normal y de fallo especficas) no
puede ocasionar una ignicin. Algunos ejemplos son:
HART
Profibus PA
FIP
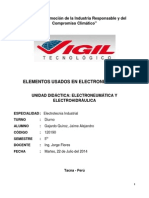
9. Ethernet Industrial
El protocolo Ethernet Industrial es una solucin
abierta estndar para la interconexin de redes
industriales que aprovecha los medios fsicos y los
chips de comunicaciones Ethernet comerciales. Si se tiene en cuenta que la tecnologa Ethernet se
utiliza desde mediados de los aos setenta y su gran aceptacin en el mundo, no es de extraar que
Ethernet sea brindada por la mayor comunidad de proveedores del mundo. Al utilizar Ethernet no
solo se sigue con una tendencia tecnolgica actual sino que adems se tiene la posibilidad de tener
acceso a datos en el nivel de los dispositivos de control mediante Internet.
Ethernet Industrial es una red abierta
Utiliza el estndar IEEE 802.3
Utiliza el conjunto de protocolos TCP/IP
Utiliza en capa de aplicacin el protocolo industrial comn (CIP)
TCP/IP son los protocolos de transporte y red respectivamente de Internet. TCP/IP proporciona una
serie de servicios que puede utilizar cualquier pareja de dispositivos para compartir datos. Dado
que la tecnologa Ethernet y los conjuntos de protocolos estndar como TCP/IP han sido
proporcionados para uso pblico se han producido en forma masiva y pueden conseguirse
fcilmente medios fsicos y herramientas de software estandarizadas con las que se puede tener las
ventajas de una tecnologa conocida y una gran facilidad de acceso.
UDP/IP tambin se utilizan junto con Ethernet. Este protocolo proporciona un transporte de datos
rpido y eficiente, caractersticas necesarias para el intercambio de informacin en tiempo real.
Para que Ethernet Industrial tenga xito se ha agregado el protocolo CIP al conjunto TCP/UDP/IP
con el fin de proporcionar un nivel de aplicacin comn.
Con la introduccin de la tecnologa de conmutacin de Ethernet (switch) y la transmisin de datos
Full-Duplex, se minimizan las colisiones de datos y el rendimiento de la red aumenta drsticamente.
Por lo general una red Ethernet utiliza una topologa estrella activa en la que los grupos de
dispositivos estn conectados punto a punto con un conmutador (switch). La ventaja de una
topologa tipo estrella radica en la compatibilidad con los productos de 10, 100 y 1000 Mbps. Puede
Sistemas Integrados de Control
(DCS & SCADA)
1 - 14
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
combinar dispositivos de 10 y 100 Mbps y el conmutador Ethernet negociar la velocidad.
Asimismo, la topologa estrella le ofrece conexiones fciles de cablear o de depurar. Ethernet
Industrial permite cubrir grandes distancias.
Ethernet Industrial ha sido diseada para gestionar grandes cantidades de datos de transmisin de
mensajes, hasta 1500 bytes por paquete. Permite la gestin de grandes volmenes de datos en
modo previsible. Gracias a la gran aceptacin de la tecnologa Ethernet en los ltimos aos, el costo
por nodo de dispositivo Ethernet est disminuyendo rpidamente.
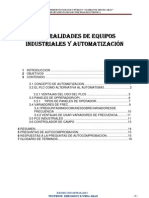
10.Profibus
En el ao 1987, las firma alemanas Bosch, Klckner
Meller y Siemens iniciaron un proyecto de
desarrollo de una arquitectura de comunicaciones
industriales que permitiera la interconexin de
equipos de distintos fabricantes. Esta fue la base de un grupo de trabajo al que se integraron otras
grandes empresas tales como ABB, AEG, Landis & Gir, etc. Algunas universidades y organizaciones
tcnicas estatales entre ellas la propie VDE y el Ministerio Federal de Investigacin alemn. Se
formaron varios grupos de trabajo en distintas reas cuya tarea esencial fue la de desarrollar un
sistema abierto de comunicaciones apto para integrar desde los sencillos transductores y elementos
de campo, pasando por los autmatas y controles numricos hasta llegar al nivel de los
miniordenadores para diseo y gestin de la produccin. El primer objetivo fue slo el diseo de un
bus de campo con una estructura abierta y un protocolo compatible que permitiera enlazar con una
red adoptada como base en los niveles superiores.
A partir del ao 1990 se abri la posibilidad para cualquier usuario o empresa de integrarse en un
consorcio denominado Profibus Nutzerorganisation que a travs de diversos comits sigue
desarrollando y dando soporte al nivel de aplicacin y certificacin de productos.
Profibus es actualmente el lder de los sistemas basados en buses de campo en Europa y goza de
aceptacin mundial. Sus reas de aplicacin incluyen manufactura, automatizacin y generacin de
procesos. Profibus es un bus de campo normalizado internacional que fue estandarizado bajo la
norma EN 50 170. Esto asegura una proteccin ptima tanto a los clientes como a los vendedores y
asegura la independencia de estos ltimos. Hoy en dia todos los fabricantes lderes en tecnologa de
automatizacin ofrecen interfaces Profibus para sus dispositivos. Profibus tiene tres versiones como
son:
PROFIBUS PA
-
PROFIBUS DP
-
Diseado para automatizacin de procesos.
Permite la conexin de sensores y actuadores a una lnea de bus comn incluso en reas
especialmente protegidas.
Permite la comunicacin de datos y energa en el bus mediante el uso de 2 tecnologas
(norma IEC 1158-2).
Optimizado para alta velocidad.
Conexiones sencillas y baratas
Diseada especialmente para la comunicacin entre los sistemas de control de
automatismos y las entradas/salidas distribuidas.
PROFIBUS FMS
-
Solucin general para tareas de comunicacin a nivel de clula.
Gran rango de aplicaciones y flexibilidad.
Posibilidad de uso en tareas de comunicaciones complejas y extensas.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 15
Tecsup
11.
SISTEMAS DE CONTROL DISTRIBUIDO
FOUNDATION FIELDBUS
Fuondation Fieldbus es un bus de campo; esto es una red de tipo
industrial que permite realizar la comunicacin entre un Sistema de
Control y los dispositivos de campo.
Soporta tanto seales anlogas como discretas.
Al igual que otros buses de campo, remplaza al viejo estndar de seales analgicas de 4-20 mA,
llevando por un slo cable la informacin generada desde varios instrumentos de campo.
En 1984 la organizaciones IEC e ISA se unieron para trabajar en un estndar. En 1987 emitieron el
primer borrador, que finalmente en 1996 dio origen a la especificacin H1.
Basado en el estndar H2 que fue abandonado en 1998, finalmente el estndar HSE vio la luz en el
ao 2000.
11.1. Aspectos Fsicos
En trminos de caractersticas fsicas, la implementacin de Foundation Fieldbus tiene dos
estndares: H1 y HSE.
El estndar H1 tiene las siguientes caractersticas
Velocidad: 31.25 Kbps
Permite arquitecturas "daisy chain" o troncal y derivaciones, sin restricciones
El nmero de dispositivos depende de varios factores, pero va de 6 a 32
Largo de cable total incluyendo derivaciones: 1900 m
La red es alimentada en 24 Vdc, y soporta una corriente del orden de 120 mA
Dispositivos en la red pueden consumir entre 10 y 20 mA
Utiliza codificacin Manchester. Seal y reloj en la misma seal, y ceros y unos se
representan por el sentido de la variacin de voltaje
El estndar HSE considera centralizar uno o ms enlaces H1:
Velocidad: 100 Mbps
Estndar Ethernet
Y por tanto, con toda su flexibilidad (subir a fibra ptica, equipos industriales, ms
econmicos, etc.)
11.2. Qu lo hace diferente?
Los aspectos anteriores pueden compararse a otros buses de campo. Pero lo que hace
diferente a Foundation Fieldbus es lo siguiente.
Desde el inicio fue conceptualizado no slo como bus de comunicaciones, sino como un
sistema que permitiera interoperabilidad entre equipos de diferentes marcas.
Cada dispositivo que cumple el estndar, es capaz de ejecutar un nmero de funciones, y
pueden comunicarse entre s, traspasndose informacin de control. Ello permite en la
prctica, que los lazos de control puedan ser ejecutados sin necesidad de un sistema de
control central.
Algunas de las funciones que se pueden ejecutar localmente son:
AI - Entrada anloga - Cualquier instrumento debe ejecutar esta funcin
Sistemas Integrados de Control
(DCS & SCADA)
1 - 16
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
AO- Salida anloga - Cualquier dispositivo de salida como una vlvula debe ejecutar
esta funcin
DI - Acepta hasta 8 entradas discretas
DO - Puede controlar hasta 8 salidas discretas
PID o PD - Funciones de control regulatorio. Pueden ejecutarse en un instrumento,
en un elemento de salida o en cualquier otro dispositivo de la red
RA - Control de razn. Acepta dos AI, y genera una salida de control
ML / BG / CS - Otras funciones de control: carga manual, clculo y selector
11.3. Segmentos y redes H1
La red H1 corresponde a la red principal en donde se conectan los instrumentos de
campo. Cada segmento FF H1 requiere una fuente de poder y sus respectivos
terminadores de red. Cada red puede estar formada por uno o ms segmentos, unidos por
un repetidor.
Todos los dispositivos en la red se comunican entre si, y comparten informacin. Estos se
denominan dispositivos H1.
En general, todas las limitaciones de cableado se refieren a un segmento especfico. Como
estndar, cada segmento puede ser hasta 1900 metros de largo. A efectos de calcular esta
distancia, se suman el cable troncal y todas sus derivaciones. El cable troncal se identifica
como el cable de longitud ms largo del segmento. Todos los dems cables se identifican
como spur o derivaciones.
11.4. Cable
Si bien existe una especificacin detallada para las caractersticas del cable a utilizar, esta
no est muy distante del cable utilizado comnmente para conexiones de 4-20 mA. Es
decir, cable par trenzado apantallado, o cable de instrumentacin.
La razn de ello es precisamente que el estndar fue diseado para reutilizar parte de las
redes existentes. Es decir, es posible pasar a FF una instalacin existente con 4-20 mA,
cambiando el instrumento en campo y el mdulo en el sistema de control o host.
Existen herramientas que pueden utilizarse para validar el cable en estas circunstancias.
Una actualizacin as permitir no slo acceder a las nuevas funcionalidades del
instrumento, como diagnstico o parametrizacin, sino tambin utilizar el mismo cable
para conectar nuevos instrumentos.
Claro que para obtener un mejor resultado, en una instalacin nueva se utilizar cable
certificado FF. Dependiendo de los requerimientos de la instalacin, se pueden usar los
siguientes tipos:
Tipo de cable
Descripcin
Calibre
Distancia
Par trenzado, apantallado
#18 AWG
1900 m
Multipar trenzado, apantallado
#22 AWG
1200 m
Multipar trenzado, sin pantalla
#26 AWG
400 m
Multiconductor, no trenzado, con pantalla
#16 AWG
200 m
Las derivaciones en general deben mantenerse cortas. El mximo es 120 metros, pero este
mximo disminuye segn aumenta el nmero de dispositivos totales por segmento o el
nmero de dispositivos en la derivacin. La siguiente tabla ilustra las diferencias.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 17
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Dispositivos Totales
1 dispositivo/
derivacin
2 dispositivos/
derivacin
3 dispositivos/
derivacin
4 dispositivos/
derivacin
01-12
120
90
60
30
13-14
90
60
30
15-18
60
30
19-24
30
25-32
Por otra parte, el efecto del ruido sobre el cable es menor en un enlace H1 que sobre un
enlace de 4-20 mA.
11.5. Conexionado
Los cables de seal no se aterrizan. S se conecta a tierra la pantalla de los cables. La
recomendacin general es en un solo punto, pero si se conecta en ms de un punto,
debera utilizarse para ello un pequeo capacitor.
En cada extremo del cable troncal del segmento debe instalarse un terminador, salvo
aquellos casos en que el dispositivo proporcione un terminador interno. Ello
generalmente ocurre en el mdulo FF del sistema de control.
11.6. Alimentacin
Sobre el mismo par se provee la alimentacin a cada uno de los dispositivos y se
transmiten los mensajes. Generalmente la fuente es de 24 VDC, pero debe asegurarse que
cada punto alimentado reciba como mnimo 9 V. Se puede calcular este valor terico en
base a longitudes, consumos y resistividad del cable. En casos extraordinarios, para cubrir
este voltaje mnimo, podra utilizarse una fuente hasta de 32 V DC. Existen programas que
permiten calcular los requerimientos de fuentes y confirmar que los voltajes apropiados
estn disponibles en cada dispositivo.
Es importante tomar en cuenta que no puede usarse cualquier fuente 24 VDC. Y no es un
tema comercial, como podra pensarse. Debe utilizarse una fuente especialmente
diseada, que debe soportar la supe imposicin de la variacin del voltaje de seal. Esto
puede ser una fuente y un acondicionador de seal separado.
En algunos casos, la alimentacin es proporcionada por el mdulo FF del sistema de
control.
11.7. Seal de comunicacin
Sobre la seal de alimentacin de 24 VDC se transmite mediante codificacin Manchester,
a travs de variaciones de voltaje positivas y negativas, que ocurren una o dos veces por
bit. La seal es polarizada, y un dispositivo no podr comunicarse si no est polarizado
correctamente. La polaridad se indica como + y -.
Sin embargo, existen algunos dispositivos que son capaces de determinar la polaridad en
base a la tensin de alimentacin, y auto ajustarse. En este caso, sus terminales podran
no indicar polaridad, ya que funcionaran de cualquier modo.
11.8. Topologas
Diferentes topologas pueden ser utilizadas para la implementacin de la red. Pueden ser:
Sistemas Integrados de Control
(DCS & SCADA)
1 - 18
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
Punto a punto. Cuando hay slo dos dispositivos, conectados entre s. Por ejemplo,
al estilo de 4-20 mA. No se usa comnmente.
Bus con derivaciones. Una lnea troncal hacia la cul se conectan todos los
dispositivos a travs de derivaciones.
Daisy Chain. Se conecta en cadena, pasando de un dispositivo a otro. Debe
cuidarse que pueda desconectarse un equipo, sin alterar el resto de la cadena.
rbol. Un bus principal, pero luego se conectan en estrella en los extremos del bus, o
adicionalmente en otros puntos
Combinada. Puede combinarse cualquiera de las opciones, aunque en general en los
proyectos se selecciona uno de los mtodos como preferente.
Las reglas sobre longitudes mximas o voltajes mnimos en nodos, aplican en todos los
casos.
12.HART
El protocolo HART (Highway Addressable Remote
Transducer) fue desarrollado por Rosemount INC. Fue
creado para poder difundir el uso de comunicacin
digital en los dispositivos de campo.
Rosemount Inc. a transferido todos sus derechos sobre el protocolo HART a la Fundacin de
Comunicacin HART (HCF, siglas en ingles) y est disponible para el uso de cualquier compaa o
persona.
HART utiliza una seal estndar de BELL, 202 codificada por desplazamiento en frecuencia, para
comunicar a 1200 baudios, superpuesta sobre la seal de medicin de 4-20mA. Teniendo un
promedio de cero, la seal codificada por desplazamiento en frecuencia no interfiere con la seal
analgica.
Hart es un protocolo maestro-esclavo (un dispositivo de campo solo responde cuando se le ha
solicitado algo previamente). Pueden existir hasta dos maestros. Hasta 15 dispositivos esclavos se
pueden conectar en configuracin multipunto.
Cada mensaje incluye las direcciones fuente y destino. Para asegurarse de que es recibido por el
dispositivo correcto. Tiene una suma de verificacin (checksum) para poder detectar cualquier
error del mensaje. El estado del dispositivo de campo est incluido en cada mensaje de respuesta,
indicando su estado de operacin correcto.
Puede o no haber informacin o datos incluidos en el mensaje, dependiendo del comando en
particular. Dos o tres transacciones de mensajes se pueden realizar cada segundo.
Para llevar a cabo diferentes funciones prestablecidas en un sensor, el protocolo HART utiliza los
comandos y el identificador de la funcin que se pretende realizar.
Los comandos del protocolo HART se definen en tres grupos. El primer grupo es el de comandos
universales y provee funciones que estn implementadas en todos los dispositivos de campo. El
segundo grupo, comandos de prctica comn, provee funciones comunes a muchos dispositivos
de campo, pero no todos. Si un dispositivo implementa funciones que estos comandos describen,
debern ser invocadas mediante el nmero de comando asignado por la Fundacin Hart . El tercer
grupo, comandos especficos de dispositivo (anteriormente llamados especficos de transmisor),
provee funciones que son ms o menos nicas para un dispositivo particular.
HART utiliza modulacin por desplazamiento en frecuencia para superponer la seal digital al lazo
de corriente analgica de 4-20 mA que conecta la central al dispositivo en el campo.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 19
Tecsup
SISTEMAS DE CONTROL DISTRIBUIDO
El 1 es representado por un ciclo de 1200Hz, mientras que el cero es representado por
aproximadamente dos ciclos de 2200Hz. Dichas frecuencias cumplen con el estndar Bell 202,
uno de los muchos utilizados para transmitir informacin digital va telefnica.
El protocolo Hart tiene como especificacin, que los maestros deben transmitir una seal de
voltaje, sin embargo el esclavo debe transmitir una seal de corriente. La seal de corriente se
convierte a seal de voltaje mediante una pequea resistencia de carga, de modo que todos los
dispositivos utilizan receptores pasivos.
La forma de onda es idealmente sinusoidal, sin embargo se acepta de forma trapezoidal, pero no
una seal cuadrada.
La especificacin de sensibilidad del dispositivo permite cierta atenuacin debida a la resistividad
del cable u otros efectos. Las especificaciones de umbral dependen de la ocurrencia de
interferencia de seales externas, y previene la interferencia entre canal (crosstalk), de otras
seales HART que se transmitan por cables adyacentes, o sistemas que no se encuentren bien
conectados a tierra o sistemas de alimentacin.
Sistemas Integrados de Control
(DCS & SCADA)
1 - 20
Вам также может понравиться
- Sistemas de Control Distribuido DCSДокумент12 страницSistemas de Control Distribuido DCSAlexis Montero OlivoОценок пока нет
- Tema 5 ResumenДокумент4 страницыTema 5 ResumenJosé Antonio Chaves MuñozОценок пока нет
- Estructura de Los PLC SДокумент13 страницEstructura de Los PLC Sgregorio dominguez100% (1)
- Unidad 2 PLCДокумент37 страницUnidad 2 PLCmartha polo50% (4)
- PLCДокумент8 страницPLCDaniel Alfredo Hernandez MiguelОценок пока нет
- Modelling Control Systems en EspañolДокумент101 страницаModelling Control Systems en EspañolsebadadamОценок пока нет
- Historia y Evolución de Los Sistemas SCADA PDFДокумент16 страницHistoria y Evolución de Los Sistemas SCADA PDFLuis Roberto MedinaОценок пока нет
- PLCДокумент14 страницPLCManoloОценок пока нет
- Tarea #1Документ8 страницTarea #1Edgar Geovany ZavalaОценок пока нет
- Parte 1-PLCДокумент63 страницыParte 1-PLCpaulОценок пока нет
- Sistemas SCADAДокумент4 страницыSistemas SCADAMarcoSandovalОценок пока нет
- Programmable Controllers Theory and Implemmentation" L.A. Bryan Resumen Capitulo 1, 2, 3Документ13 страницProgrammable Controllers Theory and Implemmentation" L.A. Bryan Resumen Capitulo 1, 2, 3Natalia ContrerasОценок пока нет
- Evolución de La Automatización IndustrialДокумент7 страницEvolución de La Automatización IndustrialElmeri Fidel Gomez AriasОценок пока нет
- PLC 1Документ17 страницPLC 1juan albertoОценок пока нет
- Automatismo Programable Por PLCДокумент19 страницAutomatismo Programable Por PLCHenry Blas SolanoОценок пока нет
- Cap IIДокумент51 страницаCap IIeverith ariasОценок пока нет
- Unidad 2 PLCДокумент37 страницUnidad 2 PLCmartha poloОценок пока нет
- PLC TODO SOBRE ELLOДокумент9 страницPLC TODO SOBRE ELLOSamuelSandovalYañezОценок пока нет
- 8 Breve Reseña Histórica, El Rol Del PLC en El Control de ProcesosДокумент40 страниц8 Breve Reseña Histórica, El Rol Del PLC en El Control de ProcesosEduardo Humeres ToledoОценок пока нет
- Cuestionario Exa. 1Документ10 страницCuestionario Exa. 1Daniel LaraОценок пока нет
- 1.5 Opciones Tecnologicas PDFДокумент8 страниц1.5 Opciones Tecnologicas PDFIrene SCОценок пока нет
- Portafolio Unidad 2Документ18 страницPortafolio Unidad 2MarcoMarquezОценок пока нет
- Trabajo Encargado de Electroneumatica y Electrohidraulica PLCsДокумент33 страницыTrabajo Encargado de Electroneumatica y Electrohidraulica PLCsJaime Alejandro Gajardo QuirozОценок пока нет
- MicrocontroladoresДокумент12 страницMicrocontroladoresJesus Pozo ImánОценок пока нет
- Automatizacion de Procesos IndustrialesДокумент29 страницAutomatizacion de Procesos IndustrialesAnjely Celeste Chavez CuevaОценок пока нет
- 1 DCS Evolucion Automatizacion IndustrialДокумент24 страницы1 DCS Evolucion Automatizacion IndustrialDiego TolozaОценок пока нет
- Sistema SCADAДокумент18 страницSistema SCADAGreogerОценок пока нет
- Estructura de Un PLCДокумент21 страницаEstructura de Un PLCFelix RomeroОценок пока нет
- Historia de Los PLCДокумент3 страницыHistoria de Los PLCAlex PerezОценок пока нет
- Principios Basicos PLCДокумент8 страницPrincipios Basicos PLCIng. Jorge Alejandro Vizcarra ValleОценок пока нет
- PLC Tarea de InvestigacionДокумент44 страницыPLC Tarea de InvestigacionJohnyGonzalez100% (1)
- Guia 1 PLCДокумент4 страницыGuia 1 PLCAlfredo MamaniОценок пока нет
- PDF - Equipos Industriales y Automatizacion BasicoДокумент17 страницPDF - Equipos Industriales y Automatizacion BasicoManuel Enrique Moran Mogollon100% (1)
- Control Logix PLCДокумент70 страницControl Logix PLCCarlos Herrera RodriguezОценок пока нет
- Principios Básicos de Los PLCДокумент45 страницPrincipios Básicos de Los PLCflerzi100% (3)
- TEMA 5 SiДокумент35 страницTEMA 5 SiJosé Antonio Chaves MuñozОценок пока нет
- Manual Isa TeoricoДокумент111 страницManual Isa TeoricoYessica Jacqueline Saucedo Jiménez100% (1)
- Estructura de Los Controladores Lógicos Programables-4-6Документ3 страницыEstructura de Los Controladores Lógicos Programables-4-6FERNANDO ALEJO SEGUNDOОценок пока нет
- Hack StoreДокумент23 страницыHack StoreWizlow MattОценок пока нет
- 2Документ3 страницы2Jorge Morales cОценок пока нет
- Grupo3 - Etapa 2Документ19 страницGrupo3 - Etapa 2carlosmereОценок пока нет
- PlcgarciadiazluiserickДокумент7 страницPlcgarciadiazluiserickluis erick garciaОценок пока нет
- Cap 1Документ9 страницCap 1Andrés BaldiviesoОценок пока нет
- PLCs - OPLCs vs. SCADA - Intrave - Com Industrial Automation PDFДокумент5 страницPLCs - OPLCs vs. SCADA - Intrave - Com Industrial Automation PDFCamilo Imbacuan PazosОценок пока нет
- Controladores Industriales InteligentesДокумент22 страницыControladores Industriales InteligentesEzequiel Perez SotoОценок пока нет
- P7 SabadoV3 625 1808164Документ25 страницP7 SabadoV3 625 1808164Andres OrdoñezОценок пока нет
- 2 - Control Industrial A12 - ModuloДокумент87 страниц2 - Control Industrial A12 - ModuloIvan AldasОценок пока нет
- Unidad IДокумент92 страницыUnidad ICarlos BritoОценок пока нет
- Tema 1Документ7 страницTema 1acamargowОценок пока нет
- Sistemas Integrados de ManufacturaДокумент7 страницSistemas Integrados de ManufacturaGuillermo GarciaОценок пока нет
- Investigacion Unidad 1Документ16 страницInvestigacion Unidad 1JesúsОценок пока нет
- Universidad Tecnológica de Tecámac: División de Electromecánica IndustrialДокумент20 страницUniversidad Tecnológica de Tecámac: División de Electromecánica IndustrialJahaziel HernándezОценок пока нет
- Actividad1borquez VillarrealДокумент8 страницActividad1borquez VillarrealSebastian BorquezОценок пока нет
- AutomatizacionДокумент15 страницAutomatizacionAlexis SaldiernaОценок пока нет
- Actividad 3 Sena PLCДокумент13 страницActividad 3 Sena PLCJaime Gil TrianaОценок пока нет
- 1-Sistemas SCADA y Pantallas HMIДокумент11 страниц1-Sistemas SCADA y Pantallas HMIOscsr RojoОценок пока нет
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОт EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОценок пока нет
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311От EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Рейтинг: 2 из 5 звезд2/5 (1)
- UF0853 - Explotación de las funcionalidades del sistema microinformáticoОт EverandUF0853 - Explotación de las funcionalidades del sistema microinformáticoОценок пока нет
- ExcelДокумент3 страницыExcelAntony Stip Flores TorresОценок пока нет
- Electro NikaДокумент12 страницElectro NikaAntony Stip Flores TorresОценок пока нет
- Fpga JCHLДокумент21 страницаFpga JCHLAntony Stip Flores TorresОценок пока нет
- Carta de Referencia MAESTRIAx2Документ9 страницCarta de Referencia MAESTRIAx2vizcensoОценок пока нет
- Mapeo de BitsДокумент296 страницMapeo de BitsAntony Stip Flores TorresОценок пока нет
- Test de Competencia SocialДокумент2 страницыTest de Competencia SocialJorge Luis SoriaОценок пока нет
- La CompanÌ - Iì - A ABCДокумент3 страницыLa CompanÌ - Iì - A ABCAndrea Elizabeth Flores OrtizОценок пока нет
- 181T0169 - Cuadro SinopticoДокумент2 страницы181T0169 - Cuadro SinopticoMariajose PérezОценок пока нет
- Procesamiento Etchevehere El Diario VaciamientoДокумент130 страницProcesamiento Etchevehere El Diario VaciamientoEntre Ríos AhoraОценок пока нет
- Arte de PescaДокумент8 страницArte de Pescadamian emanuelОценок пока нет
- Procedimiento Entrega FacturasДокумент1 страницаProcedimiento Entrega FacturasLuis Miguel Quispe DávilaОценок пока нет
- Planeacion Diagnostica 1er LeonelДокумент8 страницPlaneacion Diagnostica 1er LeonelpajarosamiОценок пока нет
- Plan Intervención Familiar Programa Emprendedores-FINALДокумент9 страницPlan Intervención Familiar Programa Emprendedores-FINALGisela Pereira OpazoОценок пока нет
- Proyecto Final InyeccionДокумент31 страницаProyecto Final InyeccionAndres Flores100% (1)
- Lpi 34-13 R4 - Especificaciones TécnicasДокумент49 страницLpi 34-13 R4 - Especificaciones TécnicasaresmecanicoОценок пока нет
- Metodología de BoochДокумент3 страницыMetodología de BoochRobson Bardales GonzalesОценок пока нет
- Chevrolet Aveo 2018 ManualДокумент272 страницыChevrolet Aveo 2018 ManualFel KozОценок пока нет
- 8.5.8.2 Common Problems and Solutions For PrintersДокумент3 страницы8.5.8.2 Common Problems and Solutions For PrintersErick Ronald Rodriguez ChisculОценок пока нет
- Curso Seguridad e Higiene PDFДокумент30 страницCurso Seguridad e Higiene PDFJeQaa VenzorОценок пока нет
- 1 Teoria Atomica ActualДокумент5 страниц1 Teoria Atomica ActualLuana BurgaОценок пока нет
- Practicas de Cantidad de CalorДокумент2 страницыPracticas de Cantidad de CalorXavi VMОценок пока нет
- Entregable 1 - Karina Martinez CamposДокумент10 страницEntregable 1 - Karina Martinez CamposKarina Martinez CamposОценок пока нет
- El Sector de Alimentos y Bebidas en Post PandemiaДокумент10 страницEl Sector de Alimentos y Bebidas en Post PandemiaAndres Felipe Castro CastroОценок пока нет
- Manual de Orientación - EagleДокумент20 страницManual de Orientación - EagleAndrew SolanoОценок пока нет
- Iperc Trabajos de Alto Riesgo 2021Документ4 страницыIperc Trabajos de Alto Riesgo 2021Gomez MarcosОценок пока нет
- Infografia Del DengueДокумент1 страницаInfografia Del DenguevgomezamОценок пока нет
- Bomba de Infusión 2016Документ5 страницBomba de Infusión 2016Darwin AngelОценок пока нет
- La Urbanización y Lo Urbano, Realidades DivergentesДокумент14 страницLa Urbanización y Lo Urbano, Realidades DivergentesturudrummerОценок пока нет
- Comenzado ElДокумент7 страницComenzado ElArroz SanachosasОценок пока нет
- Plan de Mercadotecnia Internacional (Proyecto)Документ3 страницыPlan de Mercadotecnia Internacional (Proyecto)Delmi VilledaОценок пока нет
- Tassa y Ordenanzas para El Reyno de Chile, Fechas Por El Excelentissimo Señor (1620) ArchiveДокумент32 страницыTassa y Ordenanzas para El Reyno de Chile, Fechas Por El Excelentissimo Señor (1620) ArchiveBibliomaniachilenaОценок пока нет
- La Sanación Cuántica A DISTANCIA de Manera CientíficaДокумент2 страницыLa Sanación Cuántica A DISTANCIA de Manera CientíficaGloria Aleman-GarzaОценок пока нет
- Ceguera ActualizadoДокумент7 страницCeguera ActualizadoAyumi Liliana Ueki CarrascoОценок пока нет
- Reporte. San BasilioДокумент18 страницReporte. San BasilioMaria HernandezОценок пока нет
- Actividad 2 - 101Документ2 страницыActividad 2 - 101ANDREA SOFIA MARTINEZ GUERREROОценок пока нет
- Unidad 1 - Fase 2 - Fundamentación MetodológicaДокумент5 страницUnidad 1 - Fase 2 - Fundamentación Metodológicajuan vargasОценок пока нет