Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Project On SamsungДокумент39 страницProject On SamsungAbbas0% (1)
- Scott Conected Power TransformerДокумент61 страницаScott Conected Power TransformermanosОценок пока нет
- Electricity BillДокумент1 страницаElectricity BillSushila SinghОценок пока нет
- Dep 32.32.00.11-Custody Transfer Measurement Systems For LiquidДокумент69 страницDep 32.32.00.11-Custody Transfer Measurement Systems For LiquidDAYOОценок пока нет
- Transformer Installation ManualДокумент38 страницTransformer Installation ManualbhsujanОценок пока нет
- Financial Ratios ActivityДокумент3 страницыFinancial Ratios ActivityNCF- Student Assistants' OrganizationОценок пока нет
- Unit 06 Extra Grammar ExercisesДокумент3 страницыUnit 06 Extra Grammar ExercisesLeo Muñoz43% (7)
- Xu10j4 PDFДокумент80 страницXu10j4 PDFPaulo Luiz França100% (1)
- Iglesia Ni Cristo v. Court of AppealsДокумент2 страницыIglesia Ni Cristo v. Court of AppealsNoreen NombsОценок пока нет
- Garments & Tailoring Business: Submitted byДокумент6 страницGarments & Tailoring Business: Submitted bykartik DebnathОценок пока нет
- Lightninh Protection Example (Greek)Документ7 страницLightninh Protection Example (Greek)manosОценок пока нет
- Double Tuned FiltersДокумент4 страницыDouble Tuned FiltersmanosОценок пока нет
- Design and Simulation of Harmonic Filter PDFДокумент8 страницDesign and Simulation of Harmonic Filter PDFReza FauzanОценок пока нет
- Tuning of Higher Harmonic Filters Connected To The Tertiary Windings of Converter TransformersДокумент4 страницыTuning of Higher Harmonic Filters Connected To The Tertiary Windings of Converter TransformersmanosОценок пока нет
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Документ27 страницSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanОценок пока нет
- JESTEC TemplateДокумент11 страницJESTEC TemplateMuhammad FakhruddinОценок пока нет
- bq76pl455 RegistersДокумент132 страницыbq76pl455 RegistersAhmet KARAОценок пока нет
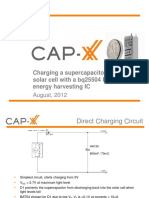
- 1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFДокумент12 страниц1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFmehralsmenschОценок пока нет
- 47-Article Text-201-1-10-20180825Документ12 страниц47-Article Text-201-1-10-20180825kevin21790Оценок пока нет
- Tagum Doctors Hospital Inc.,: Republic of The Philippines Department of Health National Highway 54, Tagum CityДокумент8 страницTagum Doctors Hospital Inc.,: Republic of The Philippines Department of Health National Highway 54, Tagum CityRoel John Atamosa CasilacОценок пока нет
- SUTI Report - Metro ManilaДокумент87 страницSUTI Report - Metro ManilaIvan Harris TanyagОценок пока нет
- EffectofObligations PDFДокумент0 страницEffectofObligations PDFÄnne Ü KimberlieОценок пока нет
- Paulson 2007 Year End Report Earns Nearly 600Документ16 страницPaulson 2007 Year End Report Earns Nearly 600Tunaljit ChoudhuryОценок пока нет
- 2018 Price List: Account NumberДокумент98 страниц2018 Price List: Account NumberPedroОценок пока нет
- Feb 21Документ8 страницFeb 21thestudentageОценок пока нет
- Direct FileActДокумент17 страницDirect FileActTAPAN TALUKDARОценок пока нет
- OFW Dependent Scholarship AssessmentДокумент3 страницыOFW Dependent Scholarship AssessmentJosebeth CairoОценок пока нет
- Validate Internet Backbone Routing and SwitchingДокумент27 страницValidate Internet Backbone Routing and SwitchingThành Trung NguyễnОценок пока нет
- G.R. No. 175350 June 13, 2012 Equitable Banking Corporation, Inc. Petitioner, Special Steel Products, and Augusto L. Pardo, RespondentsДокумент8 страницG.R. No. 175350 June 13, 2012 Equitable Banking Corporation, Inc. Petitioner, Special Steel Products, and Augusto L. Pardo, RespondentsHp AmpsОценок пока нет
- Research Paper About Cebu PacificДокумент8 страницResearch Paper About Cebu Pacificwqbdxbvkg100% (1)
- Letter Advocating For Hazard PayДокумент2 страницыLetter Advocating For Hazard PayQueens PostОценок пока нет
- CLS1Документ3 страницыCLS1Shaina Kaye De GuzmanОценок пока нет
- Bridge Ogres Little Fishes2Документ18 страницBridge Ogres Little Fishes2api-246705433Оценок пока нет
- Learn About Intensifiers and How to Use Them Effectively in WritingДокумент3 страницыLearn About Intensifiers and How to Use Them Effectively in WritingCheryl CheowОценок пока нет
- AirtelДокумент2 страницыAirtelShraddha RawatОценок пока нет
- Instructions Manual Skatey 150/250/400/600Документ19 страницInstructions Manual Skatey 150/250/400/600Denys GavrylovОценок пока нет
- imageRUNNER_ADVANCE_715_615_525_III_Series_PC_r2_200122Документ87 страницimageRUNNER_ADVANCE_715_615_525_III_Series_PC_r2_200122techwisekgОценок пока нет