Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Green Function For Klein-Gordon-Dirac EquationДокумент6 страницGreen Function For Klein-Gordon-Dirac Equationdecerto252Оценок пока нет
- TodoДокумент2 страницыTododecerto252Оценок пока нет
- Miss-Able Scenes: Day OneДокумент5 страницMiss-Able Scenes: Day Onedecerto252Оценок пока нет
- Am J Phys 79 (2011) 877Документ6 страницAm J Phys 79 (2011) 877decerto252Оценок пока нет
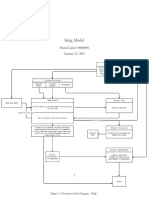
- Ising ModelДокумент5 страницIsing Modeldecerto252Оценок пока нет
- Many Body Lecture 3Документ35 страницMany Body Lecture 3decerto252Оценок пока нет
- Ma432 Classical Field Theory: Notes by Chris BlairДокумент34 страницыMa432 Classical Field Theory: Notes by Chris BlairPim BormanОценок пока нет
- PhysRevE 85 051305Документ17 страницPhysRevE 85 051305decerto252Оценок пока нет
- Chaos and Complexity Tutorial Sheet: Shaun Lahert 086686880 October 26, 2014Документ11 страницChaos and Complexity Tutorial Sheet: Shaun Lahert 086686880 October 26, 2014decerto252Оценок пока нет
- hw1 Yup Der (SДокумент1 страницаhw1 Yup Der (Sdecerto252Оценок пока нет
- Complex AnalysisДокумент26 страницComplex Analysisdecerto252Оценок пока нет
- Notes On Real AnalysisДокумент158 страницNotes On Real AnalysisPaul RyanОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Introduction and Motivation: 1.1 Finding Words For IntuitionsДокумент5 страницIntroduction and Motivation: 1.1 Finding Words For IntuitionsrichaОценок пока нет
- Quiz 2 - Matrices: Advance Engineering Math (Tcie 3-1)Документ5 страницQuiz 2 - Matrices: Advance Engineering Math (Tcie 3-1)mileygeniusОценок пока нет
- Algorithm For Matrix Addition-1Документ5 страницAlgorithm For Matrix Addition-1m azfar tariq0% (1)
- Strum LouivilleДокумент31 страницаStrum LouivilleArkadeepta RoyОценок пока нет
- Gradiance Online Accelerated Learning SolДокумент3 страницыGradiance Online Accelerated Learning SolGurjar DevyaniОценок пока нет
- Harvard's Math 136 Homework SolutionsДокумент4 страницыHarvard's Math 136 Homework SolutionsDenis TurcuОценок пока нет
- CBNST 1Документ7 страницCBNST 1Vibhu_Rastogi_4699Оценок пока нет
- Bsedmathcurriculum EDITrevisedДокумент19 страницBsedmathcurriculum EDITrevisedJoni Czarina AmoraОценок пока нет
- Exercise 7C: 1 A I J 2 AДокумент5 страницExercise 7C: 1 A I J 2 AnasehaОценок пока нет
- Analytical Numerical AnalysisДокумент3 страницыAnalytical Numerical Analysisrajadazzle86% (7)
- PHY 111 Tutorial 1Документ3 страницыPHY 111 Tutorial 1Esinaso NcamisoОценок пока нет
- Maths Bhilai Study MaterialДокумент97 страницMaths Bhilai Study MaterialVarun SahuОценок пока нет
- MAT263 NotessДокумент2 страницыMAT263 NotessAN NUR INSYIRAH AZRINОценок пока нет
- Formation of Power System Network MatrixДокумент23 страницыFormation of Power System Network MatrixMohammed AhmedОценок пока нет
- Matlab Lecture 3Документ15 страницMatlab Lecture 3waqasОценок пока нет
- Hoffman Kunze Linear Algebra Chapter 3 5 3 7 SolutionsДокумент7 страницHoffman Kunze Linear Algebra Chapter 3 5 3 7 SolutionsSuyash DateОценок пока нет
- Iterative Methods System of EquationsДокумент8 страницIterative Methods System of EquationsAsim Aziz100% (1)
- MA3151 QB IQ - by WWW - Easyengineering.net IQ QB 1Документ9 страницMA3151 QB IQ - by WWW - Easyengineering.net IQ QB 1VarsaОценок пока нет
- 2.1 Fourier Series, The Analytic Approach: Lecture 1: Classical Fourier AnalysisДокумент7 страниц2.1 Fourier Series, The Analytic Approach: Lecture 1: Classical Fourier Analysisk5788aОценок пока нет
- Worksheet 11#Документ3 страницыWorksheet 11#Mohamed Salah0% (1)
- BS Computer Science PDFДокумент72 страницыBS Computer Science PDFSheraz Ali100% (1)
- Maple TA Test PDFДокумент18 страницMaple TA Test PDFkevОценок пока нет
- International Journal of Engineering Science: Wenbin Yu, Dewey H. Hodges, Jimmy C. HoДокумент25 страницInternational Journal of Engineering Science: Wenbin Yu, Dewey H. Hodges, Jimmy C. HosquijanОценок пока нет
- Matrices - DPP 05 (Of Lec 06)Документ2 страницыMatrices - DPP 05 (Of Lec 06)Shambhavi SinhaОценок пока нет
- Assignments LaДокумент13 страницAssignments LaritwikberaОценок пока нет
- Vector SpaceДокумент67 страницVector SpaceGhulam ShabbirОценок пока нет
- CSBS Final Syllabus Year 1 - Ver 1.0 - May 2019Документ36 страницCSBS Final Syllabus Year 1 - Ver 1.0 - May 2019skarthikpriyaОценок пока нет
- NM Laboratory 4 Roots of Linear Function Direct MethodsДокумент11 страницNM Laboratory 4 Roots of Linear Function Direct MethodsagcaoilimarkrОценок пока нет
- Tutorial Orthogonal Matching Pursuit Mod2Документ13 страницTutorial Orthogonal Matching Pursuit Mod2ahmedОценок пока нет
- RGPV Syllabus Btech 1 Sem bsc103 Mathematics 1Документ1 страницаRGPV Syllabus Btech 1 Sem bsc103 Mathematics 1Babin BidОценок пока нет