Вам также может понравиться
- Semi-Active Suspension Control Design for VehiclesОт EverandSemi-Active Suspension Control Design for VehiclesРейтинг: 5 из 5 звезд5/5 (1)
- Kom Lecture NotesДокумент163 страницыKom Lecture NotesgvnagamaniОценок пока нет
- Me6401 KomДокумент128 страницMe6401 KomThomas LafontaineОценок пока нет
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsОт EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsОценок пока нет
- Kinematics of Machinery: II B.Tech IV SemesterДокумент2 страницыKinematics of Machinery: II B.Tech IV SemesterPraveen KumarОценок пока нет
- Electrical Machines: Lecture Notes for Electrical Machines CourseОт EverandElectrical Machines: Lecture Notes for Electrical Machines CourseОценок пока нет
- Kinematics of Machinery Anna University Question Papers CompiledДокумент77 страницKinematics of Machinery Anna University Question Papers CompiledNatesha SundharanОценок пока нет
- Dynamic Analysis of High-Speed Railway Alignment: Theory and PracticeОт EverandDynamic Analysis of High-Speed Railway Alignment: Theory and PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Final TOM Lab Manual New PDFДокумент10 страницFinal TOM Lab Manual New PDFdab111Оценок пока нет
- Tribological Processes in the Valve Train Systems with Lightweight Valves: New Research and ModellingОт EverandTribological Processes in the Valve Train Systems with Lightweight Valves: New Research and ModellingРейтинг: 1.5 из 5 звезд1.5/5 (2)
- Kinematics of Machinery Question BankДокумент92 страницыKinematics of Machinery Question BankNatesha Sundharan100% (2)
- Me6401 Kinematics of Machinery L T P CДокумент2 страницыMe6401 Kinematics of Machinery L T P CThiru Moorthy100% (1)
- Theory of Machines - Lab ManualДокумент28 страницTheory of Machines - Lab ManualHoneyОценок пока нет
- Syllabus (New2013 Pattern) - TOM-IДокумент14 страницSyllabus (New2013 Pattern) - TOM-IAkshayОценок пока нет
- Design of High-Speed Railway Turnouts: Theory and ApplicationsОт EverandDesign of High-Speed Railway Turnouts: Theory and ApplicationsРейтинг: 4.5 из 5 звезд4.5/5 (4)
- KOM Tutorial Book-2019-20 VK Es1Документ12 страницKOM Tutorial Book-2019-20 VK Es1Vinoth KumarОценок пока нет
- ME2203 KOM SyllabusДокумент1 страницаME2203 KOM SyllabusrkumaravelanОценок пока нет
- Theory of MachineДокумент2 страницыTheory of MachineBikash ChoudhuriОценок пока нет
- Me 2203 Kinematics of Machinery 3 1 0 4Документ2 страницыMe 2203 Kinematics of Machinery 3 1 0 4Maharaja KanthasamyОценок пока нет
- Me6401 NotesДокумент115 страницMe6401 NotesAkhil Rajagopal100% (1)
- ME8492 NotesДокумент76 страницME8492 NotesYa Hya SahalОценок пока нет
- Laboratory ManualДокумент24 страницыLaboratory ManualBibhuti BhusanОценок пока нет
- TOMДокумент2 страницыTOMErick ThorpeОценок пока нет
- Kom Lab Manuals FinalДокумент47 страницKom Lab Manuals Finalappannusa0% (1)
- KOM LAB IVSem PDFДокумент24 страницыKOM LAB IVSem PDFvenkatksr1987Оценок пока нет
- Mee215 Kinematics-Of-machinery TH 2.00 Ac26Документ2 страницыMee215 Kinematics-Of-machinery TH 2.00 Ac26yashvantОценок пока нет
- KOM Lesson PlanДокумент6 страницKOM Lesson PlanManjunatha EikilaОценок пока нет
- Kimematics of Machine: Course Code: MAE2301 Credit Units: 04 Unit IДокумент2 страницыKimematics of Machine: Course Code: MAE2301 Credit Units: 04 Unit IO.p. BrarОценок пока нет
- Mech-Iv-Kinematics of Machines (10me44) - Notes PDFДокумент196 страницMech-Iv-Kinematics of Machines (10me44) - Notes PDFgopalОценок пока нет
- Machines and Mechanism PDFДокумент3 страницыMachines and Mechanism PDFPradeepvenugopalОценок пока нет
- Kinematics of Machines ME 207 E: B.Tech (Mechanical Engg.) 3RD SemesterДокумент2 страницыKinematics of Machines ME 207 E: B.Tech (Mechanical Engg.) 3RD SemesterparmodrtkОценок пока нет
- Theory of Machine (9050)Документ7 страницTheory of Machine (9050)Candice Andrews25% (4)
- 1151au105 - Mechanics of Machines: SyllabusДокумент1 страница1151au105 - Mechanics of Machines: SyllabusSriramulu JaichandarОценок пока нет
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismДокумент43 страницыPimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaОценок пока нет
- KomДокумент12 страницKomSasi KumarОценок пока нет
- Bybliographycal Research of Analysis of MechanismsДокумент9 страницBybliographycal Research of Analysis of MechanismsJuanca SolorioОценок пока нет
- KOM Lesson PlanДокумент2 страницыKOM Lesson PlanFarhan Shah Sarani100% (1)
- Dynamics Lab ManualДокумент48 страницDynamics Lab ManualmuthurajaОценок пока нет
- 03 Te Tom-IiДокумент3 страницы03 Te Tom-Iikiran_wakchaureОценок пока нет
- Kinematics of Machinery: Lecture NotesДокумент3 страницыKinematics of Machinery: Lecture NotesPraveen KumarОценок пока нет
- Unit-III, Advanced Mechanisms PDFДокумент41 страницаUnit-III, Advanced Mechanisms PDFvamsi krishnaОценок пока нет
- ME8492 Kinematics of Machinery 03 - by LearnEngineering - inДокумент76 страницME8492 Kinematics of Machinery 03 - by LearnEngineering - inPrasanna SekarОценок пока нет
- TheoryДокумент21 страницаTheoryAli Faiz AbotiheenОценок пока нет
- Crank and Slotted Lever Quick Return (Rev2)Документ9 страницCrank and Slotted Lever Quick Return (Rev2)Vipin YadavОценок пока нет
- KOM Tutorial Book-2019-20 VK Es2Документ12 страницKOM Tutorial Book-2019-20 VK Es2Vinoth KumarОценок пока нет
- Btmel205 Kinematics of MacinesДокумент3 страницыBtmel205 Kinematics of MacinesVinayak DakreОценок пока нет
- Lecturer Notes - Kinematics of MachineryДокумент65 страницLecturer Notes - Kinematics of Machineryehsan_shameli100% (1)
- Tool RetrivelДокумент42 страницыTool RetrivelganeshОценок пока нет
- Mechanical Actuation SystemДокумент34 страницыMechanical Actuation Systemdildar123100% (2)
- Automobile Transmissiion SystemsДокумент4 страницыAutomobile Transmissiion SystemsNeha JoshiОценок пока нет
- Mechanisms Final ReportДокумент44 страницыMechanisms Final ReportOmar SaleemОценок пока нет
- Theory of Machines-I - 012110043744 - 1Документ17 страницTheory of Machines-I - 012110043744 - 1alisha_4911Оценок пока нет
- Dynamics Lab ManualДокумент51 страницаDynamics Lab ManualRavindiran ChinnasamyОценок пока нет
- Mech Sylabus 21Документ1 страницаMech Sylabus 21Honey SinghОценок пока нет
- ME2203Документ31 страницаME2203Jegan ParamasivamОценок пока нет
- Econtents of TomДокумент88 страницEcontents of TomSuraj 1212Оценок пока нет
- M.tech CAD - CAM 2nd Asignment QuestionsДокумент6 страницM.tech CAD - CAM 2nd Asignment QuestionsVenkateswar Reddy MallepallyОценок пока нет
- PHD Admissions - Sample Question Paper: Y (X) X DX X Dy XДокумент2 страницыPHD Admissions - Sample Question Paper: Y (X) X DX X Dy XabОценок пока нет
- Convergence RequirementsДокумент2 страницыConvergence RequirementsVenkateswar Reddy MallepallyОценок пока нет
- ModieiedДокумент70 страницModieiedVenkateswar Reddy MallepallyОценок пока нет
- Production Drawing & Pracctice Lab ManualДокумент23 страницыProduction Drawing & Pracctice Lab ManualVenkateswar Reddy Mallepally88% (8)
- Eg I Mid Question Bank I Mech BДокумент2 страницыEg I Mid Question Bank I Mech BVenkateswar Reddy MallepallyОценок пока нет
- R&Ac FDP Dec 2019Документ2 страницыR&Ac FDP Dec 2019Venkateswar Reddy MallepallyОценок пока нет
- Mechanics of Solids GATE BitsДокумент20 страницMechanics of Solids GATE BitsVenkateswar Reddy Mallepally100% (1)
- Gate Bits Unit 4 Cams KomДокумент5 страницGate Bits Unit 4 Cams KomVenkateswar Reddy Mallepally100% (1)
- Machine Design Gate BitsДокумент18 страницMachine Design Gate BitsVenkateswar Reddy MallepallyОценок пока нет
- 3D PRINTING Literature ReviewДокумент9 страниц3D PRINTING Literature ReviewVenkateswar Reddy Mallepally100% (5)
- Brochure 7 Oct OUДокумент2 страницыBrochure 7 Oct OUVenkateswar Reddy MallepallyОценок пока нет
- Unit 3 & 4 Objective: Unit 3 Straight Line Mechanism Gate BitsДокумент3 страницыUnit 3 & 4 Objective: Unit 3 Straight Line Mechanism Gate BitsVenkateswar Reddy MallepallyОценок пока нет
- Class Test 4 & 5 Cams - Gears - Assignment Questions KomДокумент10 страницClass Test 4 & 5 Cams - Gears - Assignment Questions KomVenkateswar Reddy MallepallyОценок пока нет
- Dynamics of Machinery GATE BitsДокумент8 страницDynamics of Machinery GATE BitsVenkateswar Reddy MallepallyОценок пока нет
- Mechanics of Solids GATE BitsДокумент20 страницMechanics of Solids GATE BitsVenkateswar Reddy Mallepally100% (1)
- KOM: Unit 1: MECHANISMS: Ob Jective Questions From Gate With SolutionsДокумент5 страницKOM: Unit 1: MECHANISMS: Ob Jective Questions From Gate With SolutionsVenkateswar Reddy Mallepally100% (1)
- Unit 3 Straight Line Mechanism Gate BitsДокумент9 страницUnit 3 Straight Line Mechanism Gate BitsVenkateswar Reddy MallepallyОценок пока нет
- KINEMATICS OF MACHINERY: UNIT 2: VELOCITY & ACCELARATION: Objective Questions From Gate With SolutionsДокумент7 страницKINEMATICS OF MACHINERY: UNIT 2: VELOCITY & ACCELARATION: Objective Questions From Gate With SolutionsVenkateswar Reddy MallepallyОценок пока нет
- Machine Design GATE BitsДокумент19 страницMachine Design GATE BitsVenkateswar Reddy MallepallyОценок пока нет
- Mech 2 2 Kom Unit 1Документ11 страницMech 2 2 Kom Unit 1Venkateswar Reddy MallepallyОценок пока нет
- Mos Beams MVR Obe PresentationДокумент12 страницMos Beams MVR Obe PresentationVenkateswar Reddy Mallepally100% (1)
- Kom Tutorials & Assignments Unit 1 & 2Документ75 страницKom Tutorials & Assignments Unit 1 & 2Venkateswar Reddy MallepallyОценок пока нет
- New Born PassportДокумент3 страницыNew Born PassportVenkateswar Reddy MallepallyОценок пока нет
- Engineering Drawing OBJECTIVE BITS With Answers - M V ReddyДокумент6 страницEngineering Drawing OBJECTIVE BITS With Answers - M V ReddyVenkateswar Reddy Mallepally86% (7)
- Kom Course File New Format M V ReddyДокумент44 страницыKom Course File New Format M V ReddyVenkateswar Reddy MallepallyОценок пока нет
- Session Planner Dom For Attendence Register On 24-07-2014Документ2 страницыSession Planner Dom For Attendence Register On 24-07-2014Venkateswar Reddy MallepallyОценок пока нет
- Robotics Bits Unit 5,6,7,8Документ3 страницыRobotics Bits Unit 5,6,7,8Venkateswar Reddy MallepallyОценок пока нет
- Robotics BIT Bank-PapersДокумент17 страницRobotics BIT Bank-PapersVenkateswar Reddy MallepallyОценок пока нет
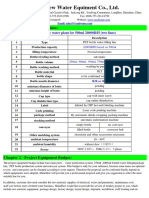
- Shine Dew Water Equiment Co., LTD.: Chapter 1 - Project Basic DataДокумент17 страницShine Dew Water Equiment Co., LTD.: Chapter 1 - Project Basic Dataardhendu1Оценок пока нет
- WL 00200 6 de enДокумент200 страницWL 00200 6 de enaОценок пока нет
- Cbna 13 4.2Документ35 страницCbna 13 4.2DAVID ALFONSO CARABALLO PATIÑOОценок пока нет
- A Maintenance Report On d6h LGP and 966cДокумент2 страницыA Maintenance Report On d6h LGP and 966cBOMA DOUGLASОценок пока нет
- Belt Drives: Power Transmission DevicesДокумент16 страницBelt Drives: Power Transmission Devicesniaz kilamОценок пока нет
- W4a33 ManualДокумент155 страницW4a33 ManualFranklyn RamirezОценок пока нет
- Operation & Service Manual: Balanceweight Type Forklift Truck With EngineДокумент99 страницOperation & Service Manual: Balanceweight Type Forklift Truck With EngineFaouzi Zorgati100% (2)
- Automatic Centre Stand PDFДокумент24 страницыAutomatic Centre Stand PDFARJUN K RОценок пока нет
- Service Manual Model 7300 Sliding Door OperatorДокумент45 страницService Manual Model 7300 Sliding Door OperatorVlady Lopez CastroОценок пока нет
- Landing Gear R 01Документ56 страницLanding Gear R 01Priyo Dwi Wijaksono100% (1)
- Various Types of Steering System, Steering GeometryДокумент32 страницыVarious Types of Steering System, Steering GeometrySumit Choudhary100% (1)
- B.tech III-II All Branch Regular and Supple Previous Question Papers May 2018Документ28 страницB.tech III-II All Branch Regular and Supple Previous Question Papers May 2018bhanuprakeshОценок пока нет
- Technical Data LovejoyДокумент4 страницыTechnical Data LovejoyAmandeep SinghОценок пока нет
- Premium BrochureДокумент4 страницыPremium BrochureRahul SinghОценок пока нет
- Alignment of Kiln PDFДокумент27 страницAlignment of Kiln PDFritesh shrivastavОценок пока нет
- Canales Moreno Isidro FerminДокумент17 страницCanales Moreno Isidro FerminAndrei PetreОценок пока нет
- 2013 1357 Wang 02 WДокумент15 страниц2013 1357 Wang 02 WReinaldo Side JuniorОценок пока нет
- Deutz Fahr Agrotron Serie 5Документ488 страницDeutz Fahr Agrotron Serie 5Taras Marian88% (8)
- SQM50Документ11 страницSQM50tom7132414Оценок пока нет
- Terex Dump TruckДокумент6 страницTerex Dump TruckEbrahim Sabouri100% (1)
- 18 Saltist 35HДокумент3 страницы18 Saltist 35HrezahОценок пока нет
- W11 Roller Product DetailsДокумент5 страницW11 Roller Product DetailsMuhammadFajarОценок пока нет
- Liebherr LB24 Drilling Rig Data Sheet Specifications 10446695 EnglishДокумент12 страницLiebherr LB24 Drilling Rig Data Sheet Specifications 10446695 EnglishEdwin WaissОценок пока нет
- AGMAДокумент65 страницAGMAhicham127886% (7)
- SQA Engine Yacht SyllabusДокумент26 страницSQA Engine Yacht SyllabusAlonso Olaya RuizОценок пока нет
- Transportation en RailДокумент50 страницTransportation en RailVraj SenjaliyaОценок пока нет
- BTEC Assignment - Unit 30Документ18 страницBTEC Assignment - Unit 30Muthu RajanОценок пока нет
- LE Pyroshield 9011 XHДокумент4 страницыLE Pyroshield 9011 XHSanjeev SharmaОценок пока нет
- Spesifikasi Wheel Loader ZL50HДокумент2 страницыSpesifikasi Wheel Loader ZL50HAdithya RangkutiОценок пока нет
- Waukesha - Universal I Positive Displacement PumpsДокумент12 страницWaukesha - Universal I Positive Displacement PumpsLuis JácomeОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureОт EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.От EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Рейтинг: 4 из 5 звезд4/5 (5)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!От EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Рейтинг: 4 из 5 звезд4/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityОт EverandDark Aeon: Transhumanism and the War Against HumanityРейтинг: 5 из 5 звезд5/5 (1)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityОт EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Artificial Intelligence: From Medieval Robots to Neural NetworksОт EverandArtificial Intelligence: From Medieval Robots to Neural NetworksРейтинг: 4 из 5 звезд4/5 (3)
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!От EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Рейтинг: 3 из 5 звезд3/5 (1)
- Practical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)От EverandPractical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Оценок пока нет
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsОт EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsРейтинг: 5 из 5 звезд5/5 (3)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionОт EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionРейтинг: 3.5 из 5 звезд3.5/5 (129)
- Artificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesОт EverandArtificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesРейтинг: 5 из 5 звезд5/5 (2)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsОт EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsОценок пока нет
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityОт EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityРейтинг: 3.5 из 5 звезд3.5/5 (22)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceОт EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (9)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessОт EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessОценок пока нет
- Robotics: Designing the Mechanisms for Automated MachineryОт EverandRobotics: Designing the Mechanisms for Automated MachineryРейтинг: 4.5 из 5 звезд4.5/5 (8)