Вам также может понравиться
- L Gear TrainsДокумент88 страницL Gear TrainsAditya Shubham Garg100% (1)
- Unit 2 and 3 Mechanics of MachinesДокумент21 страницаUnit 2 and 3 Mechanics of MachinesYogaraja JeyarajОценок пока нет
- Unit-5 Dimensional Analysis by DR Pramod PachghareДокумент23 страницыUnit-5 Dimensional Analysis by DR Pramod Pachgharepramod100% (1)
- DOME-I Unit 1 - GДокумент17 страницDOME-I Unit 1 - GGautam GunjanОценок пока нет
- HvpeДокумент122 страницыHvpeAmitОценок пока нет
- In-Sem: 30 Marks End-Sem: 70 Marks TW: 50 Marks: Theory - 4hr/week Practical - 2hr/weekДокумент45 страницIn-Sem: 30 Marks End-Sem: 70 Marks TW: 50 Marks: Theory - 4hr/week Practical - 2hr/weekfiramegbОценок пока нет
- Kinematics of FlowДокумент30 страницKinematics of Flowtuan0% (1)
- UHV 3D D1-S4 Und Human Being - Self PDFДокумент21 страницаUHV 3D D1-S4 Und Human Being - Self PDFUP BROTHERS100% (1)
- A. Total 30 ValuesДокумент8 страницA. Total 30 ValuesVaishali SinghОценок пока нет
- UHV 3D D2-S4A Und Relationship - Other FeelingsДокумент38 страницUHV 3D D2-S4A Und Relationship - Other FeelingssatyanandaramОценок пока нет
- 7 Riveted JointsДокумент72 страницы7 Riveted JointsanirudhОценок пока нет
- DOME-I Unit 1 - Lec 2Документ21 страницаDOME-I Unit 1 - Lec 2Gautam Gunjan100% (1)
- Dom Unit 1Документ41 страницаDom Unit 1Martin SudhanОценок пока нет
- 11.kinematic SynthesisДокумент13 страниц11.kinematic SynthesisSatyam AhirwalОценок пока нет
- FALLSEM2020-21 MEE3001 TH VL2020210101665 Reference Material I 31-Aug-2020 Module 4 Design of Riveted Joint 8 PDFДокумент53 страницыFALLSEM2020-21 MEE3001 TH VL2020210101665 Reference Material I 31-Aug-2020 Module 4 Design of Riveted Joint 8 PDFAK PRODUCTIONSОценок пока нет
- 01 KOM - 18ME36 - Unit 1 - MechanismsДокумент142 страницы01 KOM - 18ME36 - Unit 1 - MechanismsKiran Thunuguntla100% (1)
- Me2303 - Design of Machine ElementsДокумент14 страницMe2303 - Design of Machine ElementsGowtham RajОценок пока нет
- Unit 5 - THIN CYLINDER MOSДокумент22 страницыUnit 5 - THIN CYLINDER MOSAsvath GuruОценок пока нет
- HVPE 4.1 Und NatureДокумент17 страницHVPE 4.1 Und NatureShalini DeolОценок пока нет
- Kinematics of Machines PDFДокумент133 страницыKinematics of Machines PDFarjunОценок пока нет
- 06 Sept - Inversions of Slider CrankДокумент34 страницы06 Sept - Inversions of Slider CrankSreejith SreeОценок пока нет
- INVERSIONS of MECHANISMSДокумент39 страницINVERSIONS of MECHANISMSDibakar ThakurОценок пока нет
- Unit I Force AnalysisДокумент82 страницыUnit I Force AnalysisSaranОценок пока нет
- Unit 5 Balancing of Reciprocating MassesДокумент43 страницыUnit 5 Balancing of Reciprocating MassesNAVEENОценок пока нет
- CE6402-Strength of Materials PDFДокумент12 страницCE6402-Strength of Materials PDFSathz FlynnОценок пока нет
- Understanding Harmony in Family and SocietyДокумент36 страницUnderstanding Harmony in Family and SocietyVaibhav Singh ChoudharyОценок пока нет
- Clutches & Brakes PDFДокумент75 страницClutches & Brakes PDFSHAMANAND TELIОценок пока нет
- Module 3.1 Fluid KinematicsДокумент69 страницModule 3.1 Fluid KinematicsAayush K100% (1)
- Force and Torque MeasurementsДокумент30 страницForce and Torque MeasurementsArunabha Datta100% (3)
- MCQ Important QuestionДокумент2 страницыMCQ Important QuestionAmit MahajanОценок пока нет
- Introduction To Kinematics of MachinesДокумент68 страницIntroduction To Kinematics of Machinesavinash babuОценок пока нет
- Displacement, Velocity and Acceleration Analysis of Plane MechanismsДокумент10 страницDisplacement, Velocity and Acceleration Analysis of Plane MechanismsHimmatSinghОценок пока нет
- Green ManufacturingДокумент18 страницGreen ManufacturingFiroz KhanОценок пока нет
- ClutchesДокумент12 страницClutchesAbebaw AyeleОценок пока нет
- KOM ProjectДокумент15 страницKOM ProjectArvene Binmer JesaryОценок пока нет
- AT6501 (R-13) Notes PDFДокумент131 страницаAT6501 (R-13) Notes PDFAashiq NawinОценок пока нет
- Design of Machine ElementДокумент30 страницDesign of Machine ElementVigneswaran K100% (1)
- Sizing of CamsДокумент1 страницаSizing of CamsvijayakumarОценок пока нет
- Design of ClutchesДокумент37 страницDesign of ClutchesRintu MazumderОценок пока нет
- GearДокумент76 страницGearShahzeb AlamgirОценок пока нет
- BELT Lecture 01Документ56 страницBELT Lecture 01mahaveer dasОценок пока нет
- Relative MotionДокумент3 страницыRelative Motionkaushik247Оценок пока нет
- Unit 2 PPT DOM 3.9.21Документ27 страницUnit 2 PPT DOM 3.9.21MURALI KRISHNAN RОценок пока нет
- Value Education: Need of The HourДокумент43 страницыValue Education: Need of The HourYojana PatilОценок пока нет
- Kom Unit-IДокумент18 страницKom Unit-IRamanathan DuraiОценок пока нет
- Fluid FrictionДокумент18 страницFluid FrictionEdgar UbaldeОценок пока нет
- KINEMATICS OF MACHINERY: UNIT 2: VELOCITY & ACCELARATION: Objective Questions From Gate With SolutionsДокумент7 страницKINEMATICS OF MACHINERY: UNIT 2: VELOCITY & ACCELARATION: Objective Questions From Gate With SolutionsVenkateswar Reddy MallepallyОценок пока нет
- Brake DesignДокумент47 страницBrake DesignSouravSawОценок пока нет
- Lecture # 04 (Design of Riveted Joint)Документ31 страницаLecture # 04 (Design of Riveted Joint)Muhammad Ali Khan100% (1)
- 12.13. Force Analysis SS Rattan - Torque - ForceДокумент1 страница12.13. Force Analysis SS Rattan - Torque - ForceJithumon100% (1)
- Spur Gears - SlidesДокумент45 страницSpur Gears - SlidesKim Jeff BeringuelОценок пока нет
- CAM and FollowerДокумент13 страницCAM and Followerpratik thakareОценок пока нет
- Fluid KinematicsДокумент42 страницыFluid KinematicsLovely SinghОценок пока нет
- Module 3 - Ideal Models of Engine CyclesДокумент37 страницModule 3 - Ideal Models of Engine CyclesMuhammad BilalОценок пока нет
- Machine Element II: Institute of TechnologyДокумент39 страницMachine Element II: Institute of TechnologyAbiy Aliye100% (1)
- Belt Drive SystemДокумент37 страницBelt Drive SystemHaris ShahidОценок пока нет
- Machine Tool Engineering DesignДокумент34 страницыMachine Tool Engineering DesignAshok Kumar UppariОценок пока нет
- Report On Four Bar Mechanism of Sewing MachineДокумент8 страницReport On Four Bar Mechanism of Sewing MachineshazedislamОценок пока нет
- Chapter 8. Other MechanismsДокумент8 страницChapter 8. Other MechanismsAshish SinglaОценок пока нет
- KOM May - June 2012Документ3 страницыKOM May - June 2012nazeerabiaОценок пока нет
- CAN Bus Pin Out, and CANopen Pinout, With Signal NamesДокумент4 страницыCAN Bus Pin Out, and CANopen Pinout, With Signal NamesVincentius Nikim100% (1)
- CAN Bus Interface Description CANbus Pin Out, and Signal Names. Controller AДокумент8 страницCAN Bus Interface Description CANbus Pin Out, and Signal Names. Controller AVincentius Nikim100% (1)
- CAN Bus TutorialДокумент8 страницCAN Bus TutorialVincentius Nikim100% (1)
- Bosch Vp37 PumpsДокумент32 страницыBosch Vp37 PumpsLuís Fidalgo92% (13)
- ECD-V5 Injection Pump SystemДокумент42 страницыECD-V5 Injection Pump SystemVincentius Nikim100% (1)
- 1996 Toyota Land Cruiser Prado, RJ Modification - All Pics, Specs, Parts andДокумент4 страницы1996 Toyota Land Cruiser Prado, RJ Modification - All Pics, Specs, Parts andVincentius NikimОценок пока нет
- 217 Mod 03 Differential Locks (IC TF OP) 2-07-03Документ6 страниц217 Mod 03 Differential Locks (IC TF OP) 2-07-03arkhom1Оценок пока нет
- AUTT 1050 Automotive Suspension and Steering Systems: Master Course SyllabusДокумент5 страницAUTT 1050 Automotive Suspension and Steering Systems: Master Course SyllabusVincentius NikimОценок пока нет
- Suspension BasicДокумент7 страницSuspension BasicVincentius NikimОценок пока нет
- Audi A3 2004 Workshop ManualДокумент19 страницAudi A3 2004 Workshop ManualNatalie Jolly100% (3)
- EML2322L Wheel Hub DesignДокумент5 страницEML2322L Wheel Hub DesignVincentius NikimОценок пока нет
- RCT Vehicle Handling and ControlДокумент11 страницRCT Vehicle Handling and ControlVincentius NikimОценок пока нет
- Velo Steering 09 10Документ8 страницVelo Steering 09 10onezero111Оценок пока нет
- Vsi 06 Light Vehicle ModificationsДокумент18 страницVsi 06 Light Vehicle ModificationsVincentius NikimОценок пока нет
- A814Документ5 страницA814Vincentius NikimОценок пока нет
- Ackerman? Anti-Ackerman? or Parallel Steering?Документ10 страницAckerman? Anti-Ackerman? or Parallel Steering?Alija SirotanovićОценок пока нет
- AUTT 1050 Automotive Suspension and Steering Systems: Master Course SyllabusДокумент5 страницAUTT 1050 Automotive Suspension and Steering Systems: Master Course SyllabusVincentius NikimОценок пока нет
- Intro To Air SuspensionsДокумент6 страницIntro To Air SuspensionsGyanendra Kumar PadhiОценок пока нет
- McLaren F1Документ9 страницMcLaren F1Vincentius NikimОценок пока нет
- (Automotive) SAE - FSAE Suspension and Frame DesignДокумент11 страниц(Automotive) SAE - FSAE Suspension and Frame Designmarshall, of course100% (3)
- Simple Car DynamicsДокумент16 страницSimple Car DynamicsVincentius NikimОценок пока нет
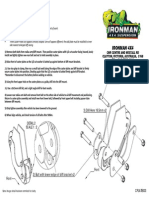
- Ironman 4X4: GQ, GU Series With Coil Springs 5 Degree Caster Plates For 130mm - 170mm LiftsДокумент1 страницаIronman 4X4: GQ, GU Series With Coil Springs 5 Degree Caster Plates For 130mm - 170mm LiftsVincentius NikimОценок пока нет
- Intro To Steering LinkageДокумент25 страницIntro To Steering LinkageVincentius NikimОценок пока нет
- Steering MechanismДокумент18 страницSteering MechanismVincentius NikimОценок пока нет
- Chapter 67 AlignmentДокумент25 страницChapter 67 AlignmentVincentius NikimОценок пока нет
- Ergonomic Design GuideДокумент66 страницErgonomic Design GuideAnonymous p2cFoXbjD100% (2)
- Kart Basic Chassis SetupДокумент6 страницKart Basic Chassis SetupVincentius NikimОценок пока нет
- Alignment 001Документ18 страницAlignment 001Vincentius NikimОценок пока нет
- Suspension 001Документ26 страницSuspension 001Vincentius NikimОценок пока нет
- Blowback Bolt WeightsДокумент4 страницыBlowback Bolt Weightsorions_hammer100% (2)
- Theory of Machines - Module 1 NotesДокумент25 страницTheory of Machines - Module 1 NotesrrcsdocsОценок пока нет
- Journal of Materials Chemistry A: Feature ArticleДокумент14 страницJournal of Materials Chemistry A: Feature ArticleAnonymous Wcj4C3jОценок пока нет
- Chapter Test On Sound WavesДокумент1 страницаChapter Test On Sound WavesryanmanubagОценок пока нет
- TachyonДокумент8 страницTachyonYufi Mustofa100% (2)
- 11 - Quadratic Forms and EllipsoidsДокумент21 страница11 - Quadratic Forms and EllipsoidsMatheus DomingosОценок пока нет
- Assignment in Power SystemДокумент5 страницAssignment in Power SystemRhiza NavallascaОценок пока нет
- Coupled PendulumДокумент5 страницCoupled PendulumSubhasis PandaОценок пока нет
- Time Avg Poynting Vector DerivationДокумент7 страницTime Avg Poynting Vector DerivationPa BloОценок пока нет
- Brass AnnealingДокумент11 страницBrass AnnealingChristos KalavrytinosОценок пока нет
- Y13 EPP Full PDFДокумент11 страницY13 EPP Full PDFyolanda gaoliОценок пока нет
- Mech Problem Set PDFДокумент95 страницMech Problem Set PDFNadiaОценок пока нет
- Handout 2014bДокумент74 страницыHandout 2014bChris LittleОценок пока нет
- BusbarДокумент29 страницBusbarwoldemariam workuОценок пока нет
- Single Tension Fastener Away From Edges Based On ACI 318-02Документ2 страницыSingle Tension Fastener Away From Edges Based On ACI 318-02civixxОценок пока нет
- Mri Physics en Rev1.3Документ76 страницMri Physics en Rev1.3Arbjan Rusi100% (3)
- Ex No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014Документ6 страницEx No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014dhineshpОценок пока нет
- Frequently Asked Questions Subject-Physics Class-Xii Adesh Patel - PGT (Physics)Документ107 страницFrequently Asked Questions Subject-Physics Class-Xii Adesh Patel - PGT (Physics)Shreya SinghОценок пока нет
- Halbersma R.S. - Geometry of Strings and Branes (2002)Документ199 страницHalbersma R.S. - Geometry of Strings and Branes (2002)Pepe LuisОценок пока нет
- WORKSHEET 3.7 Active TransportДокумент4 страницыWORKSHEET 3.7 Active TransportFadhliana UzalliОценок пока нет
- Basara Gnanasaraswathi Campus Kakatiya HillsДокумент4 страницыBasara Gnanasaraswathi Campus Kakatiya HillsNitin SharmaОценок пока нет
- Nuclear Physics IntroДокумент261 страницаNuclear Physics IntroSaed Dababneh100% (1)
- Exp 4 Postlab Worksheet Identification of An Unknown Through Qualitative AnalysisДокумент4 страницыExp 4 Postlab Worksheet Identification of An Unknown Through Qualitative AnalysisKarl CarandangОценок пока нет
- Presentation On LHB BOGIESДокумент38 страницPresentation On LHB BOGIESVijay AnandОценок пока нет
- AFS 2211 - FUNDAMENTALS OF FOOD CHEMISTRY - Water PDFДокумент40 страницAFS 2211 - FUNDAMENTALS OF FOOD CHEMISTRY - Water PDFderrickОценок пока нет
- Structural Analysis of Differential Gearbox: Daniel Das.AДокумент5 страницStructural Analysis of Differential Gearbox: Daniel Das.ASivateja NallamothuОценок пока нет
- Assignment 1Документ3 страницыAssignment 1Pawan Kumar GoyalОценок пока нет
- HC Docx1Документ13 страницHC Docx1ayushsekhariОценок пока нет