Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Injector End Exploded ViewДокумент1 страницаInjector End Exploded Viewh_mahdiОценок пока нет
- Ergm 5 in DiaДокумент1 страницаErgm 5 in Diah_mahdiОценок пока нет
- Ergm 5 in DiaДокумент1 страницаErgm 5 in Diah_mahdiОценок пока нет
- Ergm 5 in DiaДокумент1 страницаErgm 5 in Diah_mahdiОценок пока нет
- Ergm 5 in DiaДокумент1 страницаErgm 5 in Diah_mahdiОценок пока нет
- Ergm 5 in DiaДокумент1 страницаErgm 5 in Diah_mahdiОценок пока нет
- TALOS CutawayДокумент1 страницаTALOS Cutawayh_mahdiОценок пока нет
- F-1 Exploded ViewДокумент1 страницаF-1 Exploded Viewh_mahdiОценок пока нет
- F-1 Injector End ExplodedДокумент1 страницаF-1 Injector End Explodedh_mahdiОценок пока нет
- Throttle Control of An Extinguishable Solid Propellant Thruster SystemДокумент2 страницыThrottle Control of An Extinguishable Solid Propellant Thruster Systemh_mahdiОценок пока нет
- Injector ExplodedДокумент1 страницаInjector Explodedh_mahdiОценок пока нет
- Space RocketДокумент1 страницаSpace Rocketh_mahdiОценок пока нет
- F-1 Exploded ViewДокумент1 страницаF-1 Exploded Viewh_mahdiОценок пока нет
- Missile1024 TALOS PDFДокумент1 страницаMissile1024 TALOS PDFh_mahdiОценок пока нет
- Noviavion FighterДокумент1 страницаNoviavion Fighterh_mahdiОценок пока нет
- TALOS Missile CutawayДокумент1 страницаTALOS Missile Cutawayh_mahdiОценок пока нет
- TALOS Detail SectionДокумент1 страницаTALOS Detail Sectionh_mahdiОценок пока нет
- MG GunДокумент1 страницаMG Gunh_mahdiОценок пока нет
- MG DetailДокумент1 страницаMG Detailh_mahdiОценок пока нет
- MG-13 Detail Part PDFДокумент1 страницаMG-13 Detail Part PDFh_mahdiОценок пока нет
- Aircraft AirframeДокумент1 страницаAircraft Airframeh_mahdiОценок пока нет
- Rocket Detail PDFДокумент1 страницаRocket Detail PDFh_mahdiОценок пока нет
- Wireframe Aircraft PDFДокумент1 страницаWireframe Aircraft PDFh_mahdiОценок пока нет
- TALOS MissileДокумент1 страницаTALOS Missileh_mahdiОценок пока нет
- Airplane Wing Geometry and ConfigurationsДокумент7 страницAirplane Wing Geometry and Configurationsh_mahdiОценок пока нет
- Maverick 03Документ1 страницаMaverick 03h_mahdiОценок пока нет
- Improving Your RocketДокумент4 страницыImproving Your Rocketh_mahdiОценок пока нет
- ERGM MissileДокумент1 страницаERGM Missileh_mahdiОценок пока нет
- ERGM Specification PDFДокумент1 страницаERGM Specification PDFh_mahdiОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- ECE320 StudyGuideДокумент262 страницыECE320 StudyGuideTumenbayar LkhagvatserenОценок пока нет
- 5000Документ6 страниц5000royal1979Оценок пока нет
- Electronics and Instrumentation - 2020Документ28 страницElectronics and Instrumentation - 2020RahulОценок пока нет
- Company Profil CV Occust Properti PDFДокумент50 страницCompany Profil CV Occust Properti PDFAndri rismayatnaОценок пока нет
- Comparison Between PID Control and Fuzzy PIDДокумент4 страницыComparison Between PID Control and Fuzzy PIDboudibaОценок пока нет
- DSP Lab Question BankДокумент6 страницDSP Lab Question BankGaurav ReddyОценок пока нет
- Control Assignment Rev 3Документ23 страницыControl Assignment Rev 3Dean WoolleyОценок пока нет
- ACD-20 Question ListДокумент1 страницаACD-20 Question ListHiren J VasavaОценок пока нет
- Scilab Ninja: Module 3: Classical Loopshaping DesignДокумент12 страницScilab Ninja: Module 3: Classical Loopshaping Designorg25grОценок пока нет
- Process Instrumentation Lab Report 4Документ4 страницыProcess Instrumentation Lab Report 4Abu Rectify50% (4)
- DSP Lab ReportДокумент10 страницDSP Lab Reportzahid islamОценок пока нет
- EE PG Course StructureДокумент55 страницEE PG Course StructureShovan DeyОценок пока нет
- Lab Report Gas Flow Process Control Plant PI&CДокумент4 страницыLab Report Gas Flow Process Control Plant PI&Ckhaito K5Оценок пока нет
- An Atlas of Engineering Dynamic Systems, Models, and Transfer FunctionsДокумент37 страницAn Atlas of Engineering Dynamic Systems, Models, and Transfer Functionshazem ab2009Оценок пока нет
- 5.4 Stability Margins: 5.4.1 Stability Margins in Terms of Gain Margin and Phase MarginДокумент7 страниц5.4 Stability Margins: 5.4.1 Stability Margins in Terms of Gain Margin and Phase MarginDevesh JayaswalОценок пока нет
- RF Filter Part 1Документ47 страницRF Filter Part 1Tuhin DuttaОценок пока нет
- Active Magnetic BearingsДокумент20 страницActive Magnetic BearingsBalu Prakash100% (2)
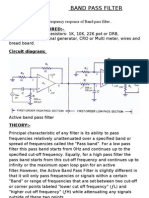
- Band Pass FilterДокумент3 страницыBand Pass FilterShruti MathurОценок пока нет
- Control Systems IMP QUESTIONSДокумент8 страницControl Systems IMP QUESTIONSHarika HarikaОценок пока нет
- Electronic Tax SystemДокумент13 страницElectronic Tax SystemBurak UĞURОценок пока нет
- Resume - Jonathan Ye 26Документ2 страницыResume - Jonathan Ye 26api-576590803Оценок пока нет
- AutomaticControlforMechanicalEngineersByM GalalRabieoptДокумент176 страницAutomaticControlforMechanicalEngineersByM GalalRabieoptHectorVasquezLaraОценок пока нет
- Basic Concept of Process Control SystemДокумент29 страницBasic Concept of Process Control Systemhabtemariam mollaОценок пока нет
- Haddi SadatДокумент5 страницHaddi SadatRonald_J._chipanaОценок пока нет
- EN Eng TandS 0710 PDFДокумент33 страницыEN Eng TandS 0710 PDFAkhmad ZaenudinОценок пока нет
- Systems Analysis and Control: Matthew M. PeetДокумент24 страницыSystems Analysis and Control: Matthew M. PeetfhfgОценок пока нет
- Modeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeДокумент4 страницыModeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeMahdi LabedОценок пока нет
- Schematic Diagram of A CNC Machine: CNC System Command Spindle Head EncoderДокумент5 страницSchematic Diagram of A CNC Machine: CNC System Command Spindle Head EncoderNaveen KumarОценок пока нет