Вам также может понравиться
- Des Cas de Kératite Infectieuse Chez Les Porteurs de Lentilles Utilisées en OrthokératologieДокумент1 страницаDes Cas de Kératite Infectieuse Chez Les Porteurs de Lentilles Utilisées en Orthokératologiebenben31Оценок пока нет
- À La Recherche Du Point G en Imagerie IRM, Un Nouvel Outil D'observation de La Sexualité FéminineДокумент7 страницÀ La Recherche Du Point G en Imagerie IRM, Un Nouvel Outil D'observation de La Sexualité Fémininebenben31Оценок пока нет
- Évaluation Des Symptômes Dans L'endométrioseДокумент4 страницыÉvaluation Des Symptômes Dans L'endométriosebenben31Оценок пока нет
- Anatomie Du Squelette Ou OstéologieДокумент15 страницAnatomie Du Squelette Ou Ostéologiebenben31Оценок пока нет
- Introduction À L'anatomie GénéraleДокумент42 страницыIntroduction À L'anatomie Généralebenben31Оценок пока нет
- Anatomie Et Physiologie en ORLДокумент77 страницAnatomie Et Physiologie en ORLbenben31Оценок пока нет
- Ece 19 SVT 01 V1Документ2 страницыEce 19 SVT 01 V1AlexОценок пока нет
- MedafДокумент42 страницыMedafYesmine JasmineОценок пока нет
- Scomazzon Pasal SMZ926Документ225 страницScomazzon Pasal SMZ926hiriОценок пока нет
- Brochure Tech 2017 Techn Info Tournai 24pДокумент28 страницBrochure Tech 2017 Techn Info Tournai 24pDayang DayangОценок пока нет
- KD455.50 Préconisations Montage Démontage - FRДокумент7 страницKD455.50 Préconisations Montage Démontage - FReric pineauОценок пока нет
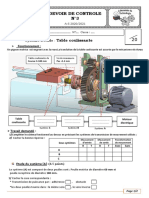
- Devoir de Controle N°3: Table CoulissanteДокумент2 страницыDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- Commandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeДокумент159 страницCommandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeSofiane ZozoОценок пока нет
- 06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Документ1 страница06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Ghilles PoloОценок пока нет
- TD RefrigerateurДокумент4 страницыTD RefrigerateurAmine BenjamiaОценок пока нет
- Concours General Mathematiques 2002 SujetДокумент5 страницConcours General Mathematiques 2002 SujetkkstanОценок пока нет
- RadjaZahia ZoutatAziza SilakhelYaminaДокумент78 страницRadjaZahia ZoutatAziza SilakhelYaminaLamia BekehchiОценок пока нет
- Sunbeam Bread Maker 5891Документ44 страницыSunbeam Bread Maker 5891fwoomОценок пока нет
- UntitledДокумент3 страницыUntitledyeheph yehephОценок пока нет
- TP SemaphoresДокумент2 страницыTP Semaphoresعضوش محمدОценок пока нет
- PP2 Cor MathДокумент69 страницPP2 Cor MathtotoОценок пока нет
- C4 CdmaДокумент20 страницC4 CdmaF Nass BenОценок пока нет
- Détection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFДокумент27 страницDétection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFminiya1703Оценок пока нет
- Exercice 1Документ2 страницыExercice 1Nour elhoudaОценок пока нет
- Fopc 0720916e 4241Документ4 страницыFopc 0720916e 4241Cyrielle DomgueОценок пока нет
- Serie MichelsonДокумент8 страницSerie MichelsonMD HM BCОценок пока нет
- Maths 4-TD2Документ3 страницыMaths 4-TD2bmessaad1970Оценок пока нет
- Hydrologie Statistique PDFДокумент153 страницыHydrologie Statistique PDFAhlam RA100% (1)
- l3 tm1 Chapitre1 Lecon 01Документ10 страницl3 tm1 Chapitre1 Lecon 01Fatima LagnaouiОценок пока нет
- Fiche JavascriptДокумент5 страницFiche JavascriptA'ch RéfОценок пока нет
- Cours Infographie 1Документ129 страницCours Infographie 1Saf BesОценок пока нет
- Ficha 7.0702 31 Honda Civic TypeR GroupeA FN2Документ20 страницFicha 7.0702 31 Honda Civic TypeR GroupeA FN2HugoОценок пока нет
- Doctorat BelhouchetДокумент184 страницыDoctorat Belhouchetfootball goalОценок пока нет
- cryptographie ٠٩٤٠٤٦Документ67 страницcryptographie ٠٩٤٠٤٦Amina BenhassineОценок пока нет
- TP6 Complx 2018-2019Документ2 страницыTP6 Complx 2018-2019Hadjer KaddourОценок пока нет
- Centrale, 2011, MP, Math Ematiques 1Документ9 страницCentrale, 2011, MP, Math Ematiques 1Max tekouОценок пока нет