Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Spiritus Twin Jet Aircraft-Design-proposalДокумент30 страницSpiritus Twin Jet Aircraft-Design-proposalranickng1Оценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Session 7 - Data Converter TechniquesДокумент1 страницаSession 7 - Data Converter Techniquesranickng1Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Channel Adaptive ADC and TDC For 28 Gb/s PAM-4 Digital ReceiverДокумент4 страницыChannel Adaptive ADC and TDC For 28 Gb/s PAM-4 Digital Receiverranickng1Оценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Session 2 - Wireline Techniques For Advanced Modulation SchemesДокумент1 страницаSession 2 - Wireline Techniques For Advanced Modulation Schemesranickng1Оценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A - 236.3Db Fom Sub-Sampling Low-Jitter Supply-Robust Ring-Oscillator PLL For Clocking Applications With Feed-Forward Noise-CancellationДокумент4 страницыA - 236.3Db Fom Sub-Sampling Low-Jitter Supply-Robust Ring-Oscillator PLL For Clocking Applications With Feed-Forward Noise-Cancellationranickng1Оценок пока нет
- A CMOS 22k-Pixel Single-Cell Resolution Multi-Modality Real-Time Cellular Sensing ArrayДокумент4 страницыA CMOS 22k-Pixel Single-Cell Resolution Multi-Modality Real-Time Cellular Sensing Arrayranickng1Оценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Technical SpecificationsДокумент44 страницыTechnical Specificationsranickng1Оценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- P4 Electric WiringДокумент1 страницаP4 Electric WiringAhmad AlrashiОценок пока нет
- 4 PDFДокумент1 страница4 PDFranickng1Оценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- 4 PDFДокумент1 страница4 PDFranickng1Оценок пока нет
- Falco FurioДокумент1 страницаFalco Furioranickng1Оценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Basic Information TJ100 - AJ Revision 5Документ12 страницBasic Information TJ100 - AJ Revision 5Mohammad Lavasani100% (1)
- Yak 52 Maitenance ManualДокумент38 страницYak 52 Maitenance Manualranickng1Оценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Accidents CanardsДокумент7 страницAccidents Canardsranickng1100% (1)
- English Radio Procedure: Permissible Center of Gravity LimitsДокумент2 страницыEnglish Radio Procedure: Permissible Center of Gravity Limitsranickng1Оценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Tp100 Fuel BurnДокумент2 страницыTp100 Fuel Burnranickng1Оценок пока нет
- Pilatus Aircraft LTD - PC-21 Model Plan PDFДокумент4 страницыPilatus Aircraft LTD - PC-21 Model Plan PDFMuchammad Ulil AidiОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Merlin LoveseyДокумент9 страницMerlin Loveseyranickng1Оценок пока нет
- M0755Документ3 страницыM0755ranickng1Оценок пока нет
- Monogram Close-Up 05 - TaifunДокумент36 страницMonogram Close-Up 05 - Taifunranickng1100% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 1972-02 Marcel Mini-FightersДокумент4 страницы1972-02 Marcel Mini-Fightersranickng1Оценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Spitfire MK I K-5054 Handling TrialsДокумент5 страницSpitfire MK I K-5054 Handling Trialsranickng1Оценок пока нет
- A085864 Stability Spit1Документ70 страницA085864 Stability Spit1ranickng1Оценок пока нет
- The Glider - Stelio Frati English Version of "L'aliante"Документ198 страницThe Glider - Stelio Frati English Version of "L'aliante"Luca MicheliniОценок пока нет
- Simons - Model Aircraft Aerodynamics PDFДокумент331 страницаSimons - Model Aircraft Aerodynamics PDFPedro Bello Saenko88% (8)
- The Aerodynamics of The SpitfireДокумент28 страницThe Aerodynamics of The Spitfireranickng1100% (2)
- 2075 Stability SpitДокумент46 страниц2075 Stability Spitranickng1Оценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Jurca MJ-77 BrochuerДокумент17 страницJurca MJ-77 Brochuerranickng1100% (1)
- Calculating Fiber Optic Loss BudgetsДокумент9 страницCalculating Fiber Optic Loss BudgetsteomondoОценок пока нет
- Electronics 08 00128Документ17 страницElectronics 08 00128Anonymous YZ9Qb3YqwkОценок пока нет
- Pozar Cap 8Документ3 страницыPozar Cap 8Pedro FilhoОценок пока нет
- The DIY Pic ProgrammerДокумент6 страницThe DIY Pic Programmerdiego100% (1)
- Department of Electronics & Instrumentation: Question Bank: CS 2361 EMBEDDED SYSTEMДокумент8 страницDepartment of Electronics & Instrumentation: Question Bank: CS 2361 EMBEDDED SYSTEMBarkavi CharuОценок пока нет
- AD2S83 Resolver ConverterДокумент19 страницAD2S83 Resolver Convertersaberleffi1Оценок пока нет
- RLD65PZB5 DatasheetДокумент3 страницыRLD65PZB5 DatasheetayeshadaОценок пока нет
- LAB-4 Analysis of Universal Gates ICs With Truth Tables and Implementation of The Digital CircuitsДокумент11 страницLAB-4 Analysis of Universal Gates ICs With Truth Tables and Implementation of The Digital CircuitsNaeem AtifОценок пока нет
- Fib1 1000esДокумент1 страницаFib1 1000esapi-3749499Оценок пока нет
- TYWE3S Module Datasheet - Tuya Smart - DocumentationДокумент26 страницTYWE3S Module Datasheet - Tuya Smart - DocumentationNguyễn TuấnОценок пока нет
- Yaesu FT 80C Service ManualДокумент80 страницYaesu FT 80C Service ManualRobert/YG2AKR82% (11)
- Ericsson Krc11822 Tda 2009 TocДокумент4 страницыEricsson Krc11822 Tda 2009 TocEarl LumОценок пока нет
- Data Conditioning & Carrier Modulation Transmitter & Data Reconditioning & Carrier Demodulation ReceiverДокумент49 страницData Conditioning & Carrier Modulation Transmitter & Data Reconditioning & Carrier Demodulation ReceiverCauVong JustinОценок пока нет
- Apeapcet2023 2022lastrankdetailsДокумент43 страницыApeapcet2023 2022lastrankdetailsTupakula NarasimharaoОценок пока нет
- Modeling and Simulation of SSPC Based On Dymola Software and Modelica LanguageДокумент5 страницModeling and Simulation of SSPC Based On Dymola Software and Modelica LanguageWilliam Jaldin CorralesОценок пока нет
- VITA 48.0, 48.1, and 48.2 Recognized As American National StandardsДокумент2 страницыVITA 48.0, 48.1, and 48.2 Recognized As American National Standards1Оценок пока нет
- TN-101 SER System ArchitecturesДокумент6 страницTN-101 SER System ArchitecturesTARAKESHWARIRОценок пока нет
- PSA Experiment 5Документ6 страницPSA Experiment 5dwiti krushnaОценок пока нет
- DS-KH6210-L Video Intercom Indoor Station With 7-Inch ScreenДокумент3 страницыDS-KH6210-L Video Intercom Indoor Station With 7-Inch ScreenGrosu HoriaОценок пока нет
- Formenti 19-1-CHASSIS Service ManualДокумент106 страницFormenti 19-1-CHASSIS Service Manualschemy111Оценок пока нет
- OFC PresentationДокумент24 страницыOFC PresentationAniket NagpalОценок пока нет
- Voltage RegulatorsДокумент12 страницVoltage RegulatorsAsghar AliОценок пока нет
- BASYX TriComm System Operation Manual v21Документ58 страницBASYX TriComm System Operation Manual v21GlobalContSolutionsОценок пока нет
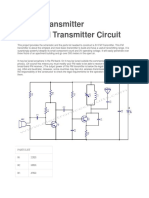
- 3V FM Transmitter 3V FM Transmitter CircuitДокумент4 страницы3V FM Transmitter 3V FM Transmitter Circuitpeter.gomes20087216Оценок пока нет
- B17 Basic Computer Bangla PDFДокумент11 страницB17 Basic Computer Bangla PDFKalam Khan100% (1)
- Transmission Lines in Communication SystemsДокумент9 страницTransmission Lines in Communication Systemsjck07Оценок пока нет
- GEAS Terms and Definitions Part 3Документ18 страницGEAS Terms and Definitions Part 3Joshua LunaОценок пока нет
- KRF V4550DДокумент24 страницыKRF V4550DHector Samir PeñarandaОценок пока нет
- Textbook: Digital Design, 6 - Edition: M. Morris Mano and Michael D. CilettiДокумент74 страницыTextbook: Digital Design, 6 - Edition: M. Morris Mano and Michael D. Ciletti林愷威Оценок пока нет
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsОт EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeОт EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeРейтинг: 4.5 из 5 звезд4.5/5 (9)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialОт EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Teach Yourself Electricity and Electronics, 6th EditionОт EverandTeach Yourself Electricity and Electronics, 6th EditionРейтинг: 3.5 из 5 звезд3.5/5 (15)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesОт EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesРейтинг: 5 из 5 звезд5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosОт EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosРейтинг: 5 из 5 звезд5/5 (1)