Вам также может понравиться
- INTRODUCCION ROBOTICAxДокумент50 страницINTRODUCCION ROBOTICAxArturo TapiaОценок пока нет
- Practica Caja CVT TriptonicДокумент10 страницPractica Caja CVT TriptonicAlex PaulОценок пока нет
- Manual NSSWДокумент95 страницManual NSSWMauricio Portillo G.Оценок пока нет
- Informe SiemensДокумент27 страницInforme SiemensJesus HuamaniОценок пока нет
- Estrategias Control Clásicas ModernasДокумент20 страницEstrategias Control Clásicas ModernasVIPERFIREОценок пока нет
- Tutorial Sensor de Flujo de AguaДокумент10 страницTutorial Sensor de Flujo de Aguadom45Оценок пока нет
- Cancelacion de Ruido Mediante Red Adaptive AdalineДокумент6 страницCancelacion de Ruido Mediante Red Adaptive AdalineCsar Pariapaza100% (1)
- Módulos EspecialesДокумент12 страницMódulos EspecialesfabryjavierОценок пока нет
- Reparacion Direccion Asistida Peugeot 307ccДокумент14 страницReparacion Direccion Asistida Peugeot 307ccsigiloОценок пока нет
- Diagnosis Nissan SentraДокумент1 страницаDiagnosis Nissan Sentradavid orellana100% (1)
- Inversion de Giro de Un MotorДокумент14 страницInversion de Giro de Un MotorAbel Apaza FuentesОценок пока нет
- Audi3 Navi Plus RnseДокумент30 страницAudi3 Navi Plus RnsefillafolioОценок пока нет
- 4ATipos de Tranductores Biomédicos MariredДокумент224 страницы4ATipos de Tranductores Biomédicos MariredJessica Cristina Mendoza MorenoОценок пока нет
- 1 Controlador de Válvula IscДокумент14 страниц1 Controlador de Válvula IscGonzaloОценок пока нет
- Morfología de Los Robots IndustrialesДокумент21 страницаMorfología de Los Robots IndustrialesKevin CastilloОценок пока нет
- Articulo FinalДокумент13 страницArticulo FinalRonald GarciaОценок пока нет
- Direcciónes Electricas SeminarioДокумент119 страницDirecciónes Electricas SeminarioGilbertoОценок пока нет
- TermistorДокумент7 страницTermistorDaniel Ñahuis TisnadoОценок пока нет
- Ficha Técnica SOUL V8 Kia PlazaДокумент2 страницыFicha Técnica SOUL V8 Kia PlazaDario mateosОценок пока нет
- Módulo de ArranqueДокумент2 страницыMódulo de Arranquehector moises torres suarezОценок пока нет
- Señal Sensor de Velocidad de Carretera - Efecto Hall PDFДокумент2 страницыSeñal Sensor de Velocidad de Carretera - Efecto Hall PDFMikel EsponjaОценок пока нет
- Guia 6Документ24 страницыGuia 6bookskskОценок пока нет
- 4 Composición de Un DTC y Estrategia de DiagnosticoДокумент3 страницы4 Composición de Un DTC y Estrategia de DiagnosticoJuan Pablo Loayza100% (1)
- Modulo Sim800x GSMДокумент12 страницModulo Sim800x GSMYohan PeñaОценок пока нет
- CirosRobotics 2013 I HSДокумент50 страницCirosRobotics 2013 I HSDaniel Henao SantanaОценок пока нет
- Presentacindelcursodecarrera2 221102045152 F5c7e9b5Документ103 страницыPresentacindelcursodecarrera2 221102045152 F5c7e9b5Josè Zavala ArroyoОценок пока нет
- Configuraciones de Un Robot Industrial3 PDFДокумент30 страницConfiguraciones de Un Robot Industrial3 PDFAgustin Basilio SalinasОценок пока нет
- TX - RX - Yagi - Dipolo PDFДокумент10 страницTX - RX - Yagi - Dipolo PDFMiguel Angel Marí SalcedoОценок пока нет
- Ejercicio LDR - PID PDFДокумент10 страницEjercicio LDR - PID PDFCamilo ReyesОценок пока нет
- Apuntes Cajasdecambiodevelocidadesautomotrices PDFДокумент42 страницыApuntes Cajasdecambiodevelocidadesautomotrices PDFRamon pujolsОценок пока нет
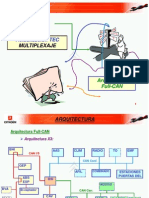
- Full CanДокумент36 страницFull CanSergio Antonio Muñoz BritoОценок пока нет
- Exposicion MicrocontroladoresДокумент45 страницExposicion MicrocontroladoresAlberto DominguezОценок пока нет
- Multiplexado - RedesДокумент22 страницыMultiplexado - Redescristian caizaОценок пока нет
- Sistema Mantenimiento Carril PDFДокумент14 страницSistema Mantenimiento Carril PDFJeferson RiveraОценок пока нет
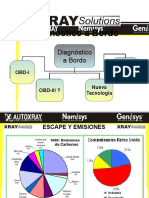
- 2005-12-17, Capacitacion Xray, Diagnostico A BordoДокумент37 страниц2005-12-17, Capacitacion Xray, Diagnostico A BordoIrving Andrade Chigo100% (1)
- Caja CVT2Документ6 страницCaja CVT2Alex Bautista VargasОценок пока нет
- MPS6Документ8 страницMPS6marcelo santiОценок пока нет
- Informe Punta LogicaДокумент9 страницInforme Punta LogicaDario JavierОценок пока нет
- Autotronica 1.2 PDFДокумент11 страницAutotronica 1.2 PDFAbraham VegaОценок пока нет
- Proyecto TacometroДокумент20 страницProyecto TacometroLuis Alfonso Prada LeonОценок пока нет
- Sangrado de Frenos Range Rover 1997Документ2 страницыSangrado de Frenos Range Rover 1997Rolando Bass WernerОценок пока нет
- 6 Velocidades de Transmisión AutomáticaДокумент2 страницы6 Velocidades de Transmisión AutomáticaNano AcОценок пока нет
- CV Daniel MartinezДокумент2 страницыCV Daniel MartinezDaniel MartinezОценок пока нет
- Red de Comunicacion CanДокумент21 страницаRed de Comunicacion CanTavo MújicaОценок пока нет
- Obd IiДокумент26 страницObd IiJonatan MarquezОценок пока нет
- Manual de PICДокумент114 страницManual de PICCarlos Alberto Uribe GómezОценок пока нет
- Autómatas Programables TIA PortalДокумент28 страницAutómatas Programables TIA Portalapac guardaОценок пока нет
- Word Airbag-Cinturones PirotecnicosДокумент13 страницWord Airbag-Cinturones PirotecnicosnathaliaОценок пока нет
- Diapositiva de MultimetroДокумент20 страницDiapositiva de MultimetroMALADYSPALACIOSОценок пока нет
- Caja de Cambios Automáticas (CVT)Документ13 страницCaja de Cambios Automáticas (CVT)Jose CespedesОценок пока нет
- Encoder y ResolverДокумент3 страницыEncoder y ResolverRudyard Alejandro Everardo RamosОценок пока нет
- Taller de Simulacion y Programación de Robots IndustrialesДокумент38 страницTaller de Simulacion y Programación de Robots IndustrialesnessssaОценок пока нет
- (VOLKSWAGEN) Manual de Taller Diagnostico Basico de Circuitos Electronicos VolkswagenДокумент15 страниц(VOLKSWAGEN) Manual de Taller Diagnostico Basico de Circuitos Electronicos Volkswagenlors75100% (1)
- Descripcion de Una Interfaz OBDII PDFДокумент4 страницыDescripcion de Una Interfaz OBDII PDFOscar GutierrezОценок пока нет
- EMG PruebasДокумент29 страницEMG PruebasRodrigo Laucata0% (1)
- Caja Golf Jetta84 CambiosДокумент14 страницCaja Golf Jetta84 Cambiosspyker88Оценок пока нет
- LabviewДокумент5 страницLabviewGabriel Alberto Ventura GarciaОценок пока нет
- Aporte RoboticaДокумент4 страницыAporte RoboticaonlyОценок пока нет
- Actuadores y Sensores InternosДокумент13 страницActuadores y Sensores InternossistemaelectricoОценок пока нет
- Reporte de Practica#1Документ11 страницReporte de Practica#1Obed Antonio SandovalОценок пока нет
- Anteproyecto - Alejandra Atondo EspinozaДокумент15 страницAnteproyecto - Alejandra Atondo EspinozaObed Antonio SandovalОценок пока нет
- Newton RhapsonДокумент2 страницыNewton RhapsonpedropecasОценок пока нет
- Software para GestionДокумент10 страницSoftware para GestionObed Antonio SandovalОценок пока нет
- Circulo de Morh para Deformaciones PDFДокумент8 страницCirculo de Morh para Deformaciones PDFmaguiveshОценок пока нет
- Procesos de Cambio deДокумент15 страницProcesos de Cambio deObed Antonio SandovalОценок пока нет
- Investigacion ProcesosДокумент8 страницInvestigacion ProcesosObed Antonio SandovalОценок пока нет
- Control de La MicroestructuraДокумент13 страницControl de La MicroestructuraObed Antonio Sandoval75% (4)
- Ensayo Polìticas Educativas InternacionalesДокумент10 страницEnsayo Polìticas Educativas Internacionaleskaren ramirez heraldezОценок пока нет
- Formacion Ciudadana Marco TeoricoДокумент15 страницFormacion Ciudadana Marco TeoricomaximhuxОценок пока нет
- CBRДокумент12 страницCBRroyher andhyОценок пока нет
- Distribución Comercial Del Libro en El Entorno Digital en América LatinaДокумент12 страницDistribución Comercial Del Libro en El Entorno Digital en América LatinaSoulStealer100% (1)
- Check List de Auditoria de PermisosДокумент35 страницCheck List de Auditoria de PermisosAllanОценок пока нет
- Especificaciones Tecnicas - HuamborcoДокумент82 страницыEspecificaciones Tecnicas - HuamborcoghersonvillanuevaОценок пока нет
- CV Angie JimenezДокумент3 страницыCV Angie JimenezKike AtaramaОценок пока нет
- Línea Prime - Prime PHX - para Uso Comercial - Gilbarco Veeder-RootДокумент3 страницыLínea Prime - Prime PHX - para Uso Comercial - Gilbarco Veeder-RootSuministro ControlОценок пока нет
- FolletoErgoIBV v16Документ13 страницFolletoErgoIBV v16David Ernesto Sierra MontielОценок пока нет
- Incidencias de ManufacturaДокумент3 страницыIncidencias de ManufacturaDamaliz Almendra Reynoso ChavezОценок пока нет
- Procedimiento de La Planificacion y Control OperacionalДокумент5 страницProcedimiento de La Planificacion y Control OperacionalMATEO BOLIVARОценок пока нет
- Presupuesto ChaveroДокумент58 страницPresupuesto ChaveroJorge RiveraОценок пока нет
- Izaje CriticoДокумент3 страницыIzaje CriticoMatias MurilloОценок пока нет
- CV - Ing. Heidi TaypeДокумент14 страницCV - Ing. Heidi TaypeMichael Leon HuaynateОценок пока нет
- Guía RápidaДокумент84 страницыGuía RápidaJazzОценок пока нет
- Capitulo 15Документ16 страницCapitulo 15Cesar MamaniОценок пока нет
- Presentación de Administración de ProyectosДокумент60 страницPresentación de Administración de ProyectosKevinEduardoОценок пока нет
- Guía de Selección de Puntos de Medición deДокумент3 страницыGuía de Selección de Puntos de Medición dekishinheidanОценок пока нет
- Ejercicios Tema IДокумент13 страницEjercicios Tema IDaniel SalazarОценок пока нет
- Diaz4 PDFДокумент1 246 страницDiaz4 PDFKathlen Jazmin ApazaОценок пока нет
- Aún No Somos HumanosДокумент14 страницAún No Somos HumanosMauricio Criollo100% (2)
- 00 U2000 R16C50 Funciones BásicasДокумент82 страницы00 U2000 R16C50 Funciones BásicasAlvaro CueОценок пока нет
- 4160 - Aog-4 - Rci - I-16 - Detalle Cuarto de BombasДокумент1 страница4160 - Aog-4 - Rci - I-16 - Detalle Cuarto de BombasOFICINA ING. CARLOS ARTURO ARANGOОценок пока нет
- Arquitectura VernaculaДокумент1 страницаArquitectura VernaculaDaNiel OcampoОценок пока нет
- Informe Final n01 Electronicos IДокумент6 страницInforme Final n01 Electronicos IJose Manuel Torre ParejaОценок пока нет
- Cómo Cambiar - Correa Poli V - VW Transporter T4 Furgón (70A, 70H, 7DA, 7DH) - Guía de SustituciónДокумент7 страницCómo Cambiar - Correa Poli V - VW Transporter T4 Furgón (70A, 70H, 7DA, 7DH) - Guía de SustituciónSabraxas CastroОценок пока нет
- Tarea#5Документ14 страницTarea#5Jose beltran rosarioОценок пока нет
- Correccion de Error Archicad 18Документ8 страницCorreccion de Error Archicad 18Eistein Ramirez AlbОценок пока нет
- Clase #3Документ18 страницClase #3Elías Gabriel PerinettoОценок пока нет
- Unidad 3 Foro Act. 3 Planeación LogísticaДокумент2 страницыUnidad 3 Foro Act. 3 Planeación Logísticawishoramos80% (5)