Вам также может понравиться
- Laboratory Experiments Report File Computer Science & Engineering May/June 2018 SessionДокумент26 страницLaboratory Experiments Report File Computer Science & Engineering May/June 2018 SessionAnil RawatОценок пока нет
- AmieДокумент18 страницAmieAnil RawatОценок пока нет
- Strategy - RBI Grade - B - Officer-2016 by RBI Topper Manojkumar EДокумент18 страницStrategy - RBI Grade - B - Officer-2016 by RBI Topper Manojkumar EAnil RawatОценок пока нет
- Fiber Bragg Grating HillДокумент14 страницFiber Bragg Grating HilleceammuОценок пока нет
- Clay Water SystemДокумент6 страницClay Water SystemAnil RawatОценок пока нет
- Resume Personal (Документ2 страницыResume Personal (Anil RawatОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 61 Point MeditationДокумент16 страниц61 Point MeditationVarshaSutrave100% (1)
- Deep MethodДокумент13 страницDeep Methoddarkelfist7Оценок пока нет
- Skylab Our First Space StationДокумент184 страницыSkylab Our First Space StationBob AndrepontОценок пока нет
- National Healthy Lifestyle ProgramДокумент6 страницNational Healthy Lifestyle Programmale nurseОценок пока нет
- EFL Listeners' Strategy Development and Listening Problems: A Process-Based StudyДокумент22 страницыEFL Listeners' Strategy Development and Listening Problems: A Process-Based StudyCom DigfulОценок пока нет
- RPS Manajemen Keuangan IIДокумент2 страницыRPS Manajemen Keuangan IIaulia endiniОценок пока нет
- Thick Teak PVT LTD Aoa and MoaДокумент17 страницThick Teak PVT LTD Aoa and MoaVj EnthiranОценок пока нет
- Analysis of The Tata Consultancy ServiceДокумент20 страницAnalysis of The Tata Consultancy ServiceamalremeshОценок пока нет
- Daftar PustakaДокумент6 страницDaftar PustakaSeptian UtamaОценок пока нет
- Types of Vegetation in Western EuropeДокумент12 страницTypes of Vegetation in Western EuropeChemutai EzekielОценок пока нет
- God's Word in Holy Citadel New Jerusalem" Monastery, Glodeni - Romania, Redactor Note. Translated by I.AДокумент6 страницGod's Word in Holy Citadel New Jerusalem" Monastery, Glodeni - Romania, Redactor Note. Translated by I.Abillydean_enОценок пока нет
- Linux Command Enigma2Документ3 страницыLinux Command Enigma2Hassan Mody TotaОценок пока нет
- Listening Fill in The Gaps and ExercisesДокумент4 страницыListening Fill in The Gaps and ExercisesAdriano CamargoОценок пока нет
- EMP Step 2 6 Week CalendarДокумент3 страницыEMP Step 2 6 Week CalendarN VОценок пока нет
- God Whose Will Is Health and Wholeness HymnДокумент1 страницаGod Whose Will Is Health and Wholeness HymnJonathanОценок пока нет
- X-Roc Latex: Product DescriptionДокумент2 страницыX-Roc Latex: Product DescriptionAmr RagabОценок пока нет
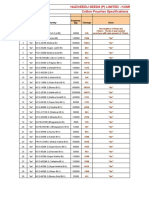
- Cotton Pouches SpecificationsДокумент2 страницыCotton Pouches SpecificationspunnareddytОценок пока нет
- Visual Acuity: Opthalmology CEX StepsДокумент5 страницVisual Acuity: Opthalmology CEX StepsVanessa HermioneОценок пока нет
- Student Management System - Full DocumentДокумент46 страницStudent Management System - Full DocumentI NoОценок пока нет
- Judges Kings ProphetsДокумент60 страницJudges Kings ProphetsKim John BolardeОценок пока нет
- Forensic BallisticsДокумент23 страницыForensic BallisticsCristiana Jsu DandanОценок пока нет
- SBP Notes-1 PDFДокумент7 страницSBP Notes-1 PDFzeeshanОценок пока нет
- Haryana at A Glance: Geographical AreaДокумент1 страницаHaryana at A Glance: Geographical AreasonuОценок пока нет
- Task Performance Valeros Roeul GДокумент6 страницTask Performance Valeros Roeul GAnthony Gili100% (3)
- 7 CAAT-AIR-GM03 Guidance-Material-for-Foreign-Approved-Maintenance-Organization - I3R0 - 30oct2019 PDFДокумент59 страниц7 CAAT-AIR-GM03 Guidance-Material-for-Foreign-Approved-Maintenance-Organization - I3R0 - 30oct2019 PDFJindarat KasemsooksakulОценок пока нет
- Sorsogon State College: Republic of The Philippines Bulan Campus Bulan, SorsogonДокумент4 страницыSorsogon State College: Republic of The Philippines Bulan Campus Bulan, Sorsogonerickson hernanОценок пока нет
- Self Authoring SuiteДокумент10 страницSelf Authoring SuiteTanish Arora100% (3)
- RulesДокумент508 страницRulesGiovanni MonteiroОценок пока нет
- Anti Dump ch-84Документ36 страницAnti Dump ch-84Tanwar KeshavОценок пока нет
- IsaiahДокумент7 страницIsaiahJett Rovee Navarro100% (1)