Вам также может понравиться
- LCM Module: Industrial Co., LTDДокумент18 страницLCM Module: Industrial Co., LTDelectropicОценок пока нет
- Set 1 AnswersДокумент22 страницыSet 1 AnswersgokulchandruОценок пока нет
- Portable Computer Group HW Department: First International Computer, IncДокумент50 страницPortable Computer Group HW Department: First International Computer, Incchiquinho77Оценок пока нет
- Power Compatible MST6M16JДокумент10 страницPower Compatible MST6M16JFG Fernando TecОценок пока нет
- CHAPTER 5: ADC, DAC Interfacing With 8086 and Its ApplicationДокумент10 страницCHAPTER 5: ADC, DAC Interfacing With 8086 and Its ApplicationAnikhet MulkyОценок пока нет
- Description: Demo Manual Dc1562B Ltc699X-X Timerblox: Oscillators, One Shots, PWM, Delay, Power On ResetДокумент14 страницDescription: Demo Manual Dc1562B Ltc699X-X Timerblox: Oscillators, One Shots, PWM, Delay, Power On Resetthachsanh86Оценок пока нет
- Semiconductor Technical Data: L SuffixДокумент7 страницSemiconductor Technical Data: L SuffixMerényi OszkárОценок пока нет
- HP TX2500 PDFДокумент40 страницHP TX2500 PDFcucuОценок пока нет
- MR041D Circuit Diagram-0131-08Документ56 страницMR041D Circuit Diagram-0131-08Maximo Garcia JuniorОценок пока нет
- A SemiconductoresДокумент19 страницA Semiconductoresajcl_1987Оценок пока нет
- 93xx86 Varias VersionesДокумент28 страниц93xx86 Varias VersionesPosada Burgueño CarlosОценок пока нет
- 93lc56 DatasheetДокумент36 страниц93lc56 DatasheetJose Angel Camara SantosОценок пока нет
- NHD C160100diz FSW FBWДокумент15 страницNHD C160100diz FSW FBWabelincoln1234Оценок пока нет
- DM240314 Eng InfosheetДокумент8 страницDM240314 Eng InfosheetnonononobodyОценок пока нет
- LCD Controller s6b0108Документ24 страницыLCD Controller s6b0108Sunny HuxiОценок пока нет
- LCD Grafico Wg12864aДокумент25 страницLCD Grafico Wg12864aseykarimОценок пока нет
- SPI Serial Eeprom: FeaturesДокумент22 страницыSPI Serial Eeprom: FeaturesHmcc HoangОценок пока нет
- Modbus-1 3eДокумент4 страницыModbus-1 3ekelpiusОценок пока нет
- 24lc08 EepromДокумент27 страниц24lc08 EepromIsmael Minchola CarhuasОценок пока нет
- DRV 8801Документ27 страницDRV 8801Rian PermanaОценок пока нет
- 24Lc04B/08B: 4K/8K 2.5V I C Serial EepromsДокумент13 страниц24Lc04B/08B: 4K/8K 2.5V I C Serial EepromsJose Antonio Lopez JuradoОценок пока нет
- Document Title: GM76C256CДокумент11 страницDocument Title: GM76C256CFrenk EndyОценок пока нет
- Acer Jm31 Inventec GerberДокумент36 страницAcer Jm31 Inventec GerberWade DyerОценок пока нет
- HP nc8000Документ69 страницHP nc8000PC MediaPointОценок пока нет
- FAN8082 (KA3082N) : Bi-Directional DC Motor DriverДокумент13 страницFAN8082 (KA3082N) : Bi-Directional DC Motor DriverFrancisco Hernandez MartinezОценок пока нет
- Iotuni 22Документ24 страницыIotuni 22Ashwin BenkeОценок пока нет
- LCD 2x16 Spec-29045Документ30 страницLCD 2x16 Spec-29045kerblaОценок пока нет
- Philips Mosfet Class AbДокумент9 страницPhilips Mosfet Class AbAnthony Fernandez MendezОценок пока нет
- Skhema Na Acer Aspire 4720Z Z01 E3CДокумент26 страницSkhema Na Acer Aspire 4720Z Z01 E3CQuique FerОценок пока нет
- 24 LC 16Документ32 страницы24 LC 16Jos RoОценок пока нет
- mc14518bcp en PDFДокумент8 страницmc14518bcp en PDFdellcoОценок пока нет
- C and Assembly Code For 8051 Based Temperarture Monitoring SystemДокумент11 страницC and Assembly Code For 8051 Based Temperarture Monitoring Systemsurvivalofthepoly100% (1)
- MCD Demo2 Manual enДокумент33 страницыMCD Demo2 Manual enmario_villarreal_110% (1)
- Cmos Sram K6T1008C2E Family: Document TitleДокумент11 страницCmos Sram K6T1008C2E Family: Document TitleOmar LeonОценок пока нет
- Sega IC7Документ10 страницSega IC7Java BatistaОценок пока нет
- WH1602W Tmi JTДокумент29 страницWH1602W Tmi JTscribe72Оценок пока нет
- Omron SYSMAC-C Series: Bit DeviceДокумент6 страницOmron SYSMAC-C Series: Bit DeviceJeydson StorchОценок пока нет
- SYCДокумент113 страницSYCwintermacОценок пока нет
- Esprimo M9400 - Inventec M11D - Rev AX1Документ44 страницыEsprimo M9400 - Inventec M11D - Rev AX1nikola1660Оценок пока нет
- THDB - Ada: High-Speed A/D and D/A Development KitДокумент24 страницыTHDB - Ada: High-Speed A/D and D/A Development KitZarnescu GeorgeОценок пока нет
- Dell Xps m1530 Intel Discrete - Wistron HawkeДокумент57 страницDell Xps m1530 Intel Discrete - Wistron Hawkemaoh80Оценок пока нет
- G Timers Gt3Документ41 страницаG Timers Gt3bansalrОценок пока нет
- Electric TimerДокумент40 страницElectric TimergamasistemОценок пока нет
- M28W320CT M28W320CB: 32 Mbit (2Mb x16, Boot Block) Low Voltage Flash MemoryДокумент43 страницыM28W320CT M28W320CB: 32 Mbit (2Mb x16, Boot Block) Low Voltage Flash Memorynego20Оценок пока нет
- TCM8230MDДокумент27 страницTCM8230MDJames BalsillieОценок пока нет
- HP g62 Compaq Cq62 Foxconn Star Federer Rev 1.0 SCHДокумент40 страницHP g62 Compaq Cq62 Foxconn Star Federer Rev 1.0 SCHgabiun0% (1)
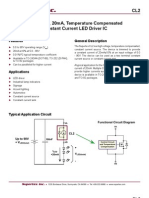
- CL2 Simple 90V, 20ma, Temperature Compensated Constant Current LED Driver ICДокумент7 страницCL2 Simple 90V, 20ma, Temperature Compensated Constant Current LED Driver ICnevdullОценок пока нет
- Datasheet 74HC32Документ8 страницDatasheet 74HC32Lưu Chung KiênОценок пока нет
- HEF4013B: 1. General DescriptionДокумент15 страницHEF4013B: 1. General DescriptionMuhammad Iqbal RasyidiОценок пока нет
- PSR-S700 S900 Lsi CДокумент13 страницPSR-S700 S900 Lsi CAdriano CamocardiОценок пока нет
- Datasheet EEPROMДокумент9 страницDatasheet EEPROMIram Loya ValladaresОценок пока нет
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОт EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОценок пока нет
- CCTV Surveillance: Video Practices and TechnologyОт EverandCCTV Surveillance: Video Practices and TechnologyРейтинг: 4 из 5 звезд4/5 (1)
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142От EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Оценок пока нет
- NSR M2031 - PH24-NSR-B2A - Survey - AIRDOC - Smart LTE 2024Документ18 страницNSR M2031 - PH24-NSR-B2A - Survey - AIRDOC - Smart LTE 2024threesome.efryllapinaОценок пока нет
- The US Shadow GovernmentДокумент10 страницThe US Shadow GovernmentLipstikk N'Leathr (EyesOfMisery)Оценок пока нет
- (Free Scores - Com) - Di Capua Eduardo o Sole Mio 22271 PDFДокумент3 страницы(Free Scores - Com) - Di Capua Eduardo o Sole Mio 22271 PDFSeulki HongОценок пока нет
- Yamaha XJ6 2009 - Service Manual (Inglês)Документ554 страницыYamaha XJ6 2009 - Service Manual (Inglês)fabiokruse70% (10)
- KIITEE 2019 17th Jan 2019 PDFДокумент88 страницKIITEE 2019 17th Jan 2019 PDFprasanta_bbsrОценок пока нет
- WI - C.4.1 Set Up Site Documentation V1.1aДокумент5 страницWI - C.4.1 Set Up Site Documentation V1.1ayoen_anОценок пока нет
- DC 6 Digital Gov Data Sheet PDFДокумент4 страницыDC 6 Digital Gov Data Sheet PDFCarlos MajanoОценок пока нет
- Online Shopping Portal Project ReportДокумент33 страницыOnline Shopping Portal Project ReportSagar Chauhan50% (2)
- A SWOT Analysis of Planning Support Systems: G.A. V Onk at G M A I L.C O MДокумент23 страницыA SWOT Analysis of Planning Support Systems: G.A. V Onk at G M A I L.C O MDannyRamadhanОценок пока нет
- Emulate 500 Instruction ExceptionsДокумент3 страницыEmulate 500 Instruction ExceptionsSebastian Gallardo VerdugoОценок пока нет
- Solved Problems: Problem (7.1)Документ13 страницSolved Problems: Problem (7.1)Rafi SulaimanОценок пока нет
- Gamma-J Usb Web Store SrsДокумент44 страницыGamma-J Usb Web Store Srsaditya181987Оценок пока нет
- Woolridge - Reasnoning About Rational AgentsДокумент232 страницыWoolridge - Reasnoning About Rational AgentsAlejandro Vázquez del MercadoОценок пока нет
- Optimize WMSДокумент54 страницыOptimize WMSMohammed_Abbas_7507Оценок пока нет
- Experimental PsychologyДокумент38 страницExperimental PsychologyPauloKinaging100% (2)
- Roslyn Riley ResumeДокумент2 страницыRoslyn Riley Resumeapi-78443823Оценок пока нет
- Frangible Roof To Shell JointДокумент1 страницаFrangible Roof To Shell JointSAGARОценок пока нет
- Sequence Based SpecificationsДокумент11 страницSequence Based SpecificationsrexthrottleОценок пока нет
- ABB-Handbook Protection and Control DevicesДокумент157 страницABB-Handbook Protection and Control DevicesJose Antonio Ramirez MurilloОценок пока нет
- Stadium ACL Test PlanДокумент10 страницStadium ACL Test Planonlycisco.tkОценок пока нет
- Gmo SapiensДокумент16 страницGmo SapiensAlejandro García67% (3)
- Siebel Certification QBankДокумент85 страницSiebel Certification QBankSoj SurajОценок пока нет
- Lecture 03Документ42 страницыLecture 03Laís Medeiros100% (1)
- Injector DC CalculatorДокумент14 страницInjector DC CalculatorFirdaus AbdullahОценок пока нет
- Standard Competency Based Interview Questions OrtusДокумент14 страницStandard Competency Based Interview Questions OrtusLiv YamОценок пока нет
- IAMI Revision Questions Motor and GeneralДокумент8 страницIAMI Revision Questions Motor and GeneralStewart LongОценок пока нет
- TIA Workshop ITBДокумент48 страницTIA Workshop ITBFirman Suhendra100% (1)
- Feed Water System ComponentsДокумент11 страницFeed Water System ComponentsBlitz XyrusОценок пока нет
- Science PracticeДокумент7 страницScience PracticeAndi CentenoОценок пока нет