Вам также может понравиться
- Energy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyОт EverandEnergy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyChristine JuniorОценок пока нет
- Simgas PRMS SimulationДокумент9 страницSimgas PRMS Simulationmatteo2009Оценок пока нет
- A New Automotive Air Conditioning System Simulation Tool Developed in MATLAB/SimulinkДокумент15 страницA New Automotive Air Conditioning System Simulation Tool Developed in MATLAB/SimulinkPrashant IngaleОценок пока нет
- Compressor Station Optimization Using Simulation-Based OptimizationДокумент10 страницCompressor Station Optimization Using Simulation-Based OptimizationAmbrish SinghОценок пока нет
- MatlabДокумент47 страницMatlabalkadyasОценок пока нет
- Willans Line ArticleДокумент8 страницWillans Line Articlealiscribd46100% (1)
- At Zero-Dimensional Combustion SimulationДокумент4 страницыAt Zero-Dimensional Combustion SimulationAhmed Mohamed IbrahimОценок пока нет
- PB2Документ8 страницPB2Thor L. LemmingerОценок пока нет
- A Coupled 1D-3D Numerical Method For Buoyancy-Driven Heat Transfer in A Generic Engine BayДокумент19 страницA Coupled 1D-3D Numerical Method For Buoyancy-Driven Heat Transfer in A Generic Engine Baymarcin.ziolkowski.55Оценок пока нет
- Prico Process PDFДокумент13 страницPrico Process PDFcorkynhoОценок пока нет
- Analysis and Enhancement of Hydraulic Ram Pump Using Computational Fluid Dynamics (CFD)Документ25 страницAnalysis and Enhancement of Hydraulic Ram Pump Using Computational Fluid Dynamics (CFD)IJIRSTОценок пока нет
- A New, Fast Parallel Simulated Annealing Algorithm For Reservoir CharacterizationДокумент11 страницA New, Fast Parallel Simulated Annealing Algorithm For Reservoir CharacterizationMartik MartikianОценок пока нет
- A Numerical Analysis For The Cooling Module Related To Automobile Air Conditioning SystemДокумент10 страницA Numerical Analysis For The Cooling Module Related To Automobile Air Conditioning SystematosayОценок пока нет
- Etc2021 791Документ15 страницEtc2021 791nuli chanОценок пока нет
- Performance Analysis in Off Design Condition of Gas Trbine Air Bottoming Combined SystemДокумент10 страницPerformance Analysis in Off Design Condition of Gas Trbine Air Bottoming Combined SystemIrving Rosas JovenОценок пока нет
- Monitoring Kraft Recovery Boiler Fouling Using Principal Component AnalysisДокумент9 страницMonitoring Kraft Recovery Boiler Fouling Using Principal Component AnalysisTHuy DvОценок пока нет
- Optimal Scheduling of Cascaded Hydrothermal Systems Using A New Improved Particle Swarm Optimization TechniqueДокумент11 страницOptimal Scheduling of Cascaded Hydrothermal Systems Using A New Improved Particle Swarm Optimization TechniqueSujoy DasОценок пока нет
- DEVELOPING AN OPTIMUM MANAGEMENT MODEL FOR TURBOMACHINESДокумент8 страницDEVELOPING AN OPTIMUM MANAGEMENT MODEL FOR TURBOMACHINESbouachahceneОценок пока нет
- Super Computing Applications in Internal Combustion Engine Design andДокумент8 страницSuper Computing Applications in Internal Combustion Engine Design andMadhusudan BarotОценок пока нет
- Case Study - Gas Turbine Combustor DesignДокумент9 страницCase Study - Gas Turbine Combustor DesignSanthosh LingappaОценок пока нет
- Thermodynamic Simulation of Steam Power Cycles UsiДокумент7 страницThermodynamic Simulation of Steam Power Cycles UsiKylo RenОценок пока нет
- Theme: Oil & Gas Transportation and Storage Sub-Theme: Multiphase Flow & ModelingДокумент17 страницTheme: Oil & Gas Transportation and Storage Sub-Theme: Multiphase Flow & ModelingJosh SabimanОценок пока нет
- Pinch White Paper (Rev 3) 2012Документ21 страницаPinch White Paper (Rev 3) 2012Energy_ExpertОценок пока нет
- Design PitfallsДокумент4 страницыDesign PitfallsShailesh LohareОценок пока нет
- Computer Simulation of Compression Ignition Engine Through MATLABДокумент17 страницComputer Simulation of Compression Ignition Engine Through MATLABiaetsdiaetsdОценок пока нет
- Comparing Pressure Flow Solvers For Dinamic SimulationДокумент24 страницыComparing Pressure Flow Solvers For Dinamic SimulationEdgar HuancaОценок пока нет
- Application of Roms To Aeroengines Health Monitoring: April 2019Документ20 страницApplication of Roms To Aeroengines Health Monitoring: April 2019tadele10Оценок пока нет
- Applied Thermal Engineering: Muzaffar Ali, Vladimir Vukovic, Mukhtar Hussain Sahir, Daniele BasciottiДокумент12 страницApplied Thermal Engineering: Muzaffar Ali, Vladimir Vukovic, Mukhtar Hussain Sahir, Daniele Basciottianiketkulkarni1509Оценок пока нет
- Development and Validation of A Crank Angle Model of An Automotive Turbocharged Engine For Hil ApplicationsДокумент10 страницDevelopment and Validation of A Crank Angle Model of An Automotive Turbocharged Engine For Hil Applicationsarun kumarОценок пока нет
- PX C 3894038Документ7 страницPX C 3894038Sharad JadhavОценок пока нет
- CFD Analysis of Pelton Runner: Amod Panthee, Hari Prasad Neopane, Bhola ThapaДокумент6 страницCFD Analysis of Pelton Runner: Amod Panthee, Hari Prasad Neopane, Bhola ThapaMuhammad HasdarОценок пока нет
- Model-Based Approach to Engine CalibrationДокумент8 страницModel-Based Approach to Engine CalibrationbiopoweredОценок пока нет
- Flownex ProfileДокумент4 страницыFlownex Profilecrazy_nm_addОценок пока нет
- Three-Dimensional Simulation of The Transient Behavior of A Three-Way Catalytic ConverterДокумент11 страницThree-Dimensional Simulation of The Transient Behavior of A Three-Way Catalytic ConverterabcОценок пока нет
- Thermoeconomic Analysis of Gas Turbine Based Cycles: A. F. MassardoДокумент8 страницThermoeconomic Analysis of Gas Turbine Based Cycles: A. F. MassardoAndreescu Anna-Maria TheodoraОценок пока нет
- Analysis of Vehicle Exhaust Waste Heat Recovery Potential Using A Rankine CycleДокумент56 страницAnalysis of Vehicle Exhaust Waste Heat Recovery Potential Using A Rankine CycleTiago HenriquesОценок пока нет
- ICEF2003-729: A Modelling Approach To The Design Optimization of Catalytic Converters of I. C. EnginesДокумент7 страницICEF2003-729: A Modelling Approach To The Design Optimization of Catalytic Converters of I. C. Enginespurus12Оценок пока нет
- Accepted Manuscript: Applied Thermal EngineeringДокумент23 страницыAccepted Manuscript: Applied Thermal EngineeringteorikdeliОценок пока нет
- Assawamartbunlue Et Al. 2000Документ9 страницAssawamartbunlue Et Al. 2000Francisco OppsОценок пока нет
- A Simplified Model For The Spatial Distribution of Temperature in A Motored DI Diesel EngineДокумент17 страницA Simplified Model For The Spatial Distribution of Temperature in A Motored DI Diesel EnginePariotis EfthimiosОценок пока нет
- ME 325 Final Project Combined Cycle Efficiency OptimizationДокумент3 страницыME 325 Final Project Combined Cycle Efficiency Optimizationazeem sheikhОценок пока нет
- Art 9Документ6 страницArt 9Hernan Camilo Vargas AcostaОценок пока нет
- Thermodinamic AnalysysДокумент13 страницThermodinamic AnalysysLeandro BuosiОценок пока нет
- Qfarc 2016 Eepp2795Документ2 страницыQfarc 2016 Eepp2795kemoОценок пока нет
- HTTPДокумент11 страницHTTPOswaldo PerezОценок пока нет
- IntroductionДокумент4 страницыIntroductionHazel AdoОценок пока нет
- Simulation of Vars Component (Evaporator) Using Ansys SoftwareДокумент22 страницыSimulation of Vars Component (Evaporator) Using Ansys SoftwareSanket BhilareОценок пока нет
- Stankovic09 PieselParticulateFiltersДокумент5 страницStankovic09 PieselParticulateFiltersEl SebastianОценок пока нет
- 8 - Shen Et Al 2021 Modeling and Performance Analysis of Diesel Engine Considering The Heating Effect of Blow by OnДокумент15 страниц8 - Shen Et Al 2021 Modeling and Performance Analysis of Diesel Engine Considering The Heating Effect of Blow by OnAli ElmaihyОценок пока нет
- 07 PaperДокумент21 страница07 PaperVahap Eyüp DOĞANОценок пока нет
- IADC/SPE 81636 Improvements in Dynamic Modeling of Underbalanced DrillingДокумент8 страницIADC/SPE 81636 Improvements in Dynamic Modeling of Underbalanced DrillingJohnSmithОценок пока нет
- Comparative Energy Analysis of A Load Sensing SystДокумент19 страницComparative Energy Analysis of A Load Sensing SystMDLОценок пока нет
- Availability Analysis of A Turbocharged Diesel Engine Operating Under Transient Load ConditionsДокумент20 страницAvailability Analysis of A Turbocharged Diesel Engine Operating Under Transient Load ConditionsParth JaggiОценок пока нет
- CIGRE 2018: 21, Rue D'artois, F-75008 PARISДокумент11 страницCIGRE 2018: 21, Rue D'artois, F-75008 PARISVenkatasubramanian IyerОценок пока нет
- Sabp A 009Документ208 страницSabp A 009sethu1091100% (2)
- HEAT TRANSFER MODELLING IN EXHAUST SYSTEMSДокумент34 страницыHEAT TRANSFER MODELLING IN EXHAUST SYSTEMSKentner Chavez CorreaОценок пока нет
- Digital Flow Meter For GasДокумент2 страницыDigital Flow Meter For GasMASSFLOWMEASUREMENTSОценок пока нет
- Organic Rankine CycleДокумент14 страницOrganic Rankine Cycleoverlord5555Оценок пока нет
- CFD Analysis of Optimal Hardware CoolingДокумент10 страницCFD Analysis of Optimal Hardware CoolingAmjadRiazОценок пока нет
- CO2 Power Cycle ModelingДокумент9 страницCO2 Power Cycle ModelingxbeastxxОценок пока нет
- XH200 Spec Sheet USLETTER PrintДокумент2 страницыXH200 Spec Sheet USLETTER PrintTiago HenriquesОценок пока нет
- QLT m10 Asl Parts Book 2012Документ46 страницQLT m10 Asl Parts Book 2012Tiago Henriques100% (1)
- EM P 08 IOT Energy Systems Analysis SlidesДокумент18 страницEM P 08 IOT Energy Systems Analysis SlidesTiago HenriquesОценок пока нет
- EM P 06 Energy Systems Analysis SlidesДокумент14 страницEM P 06 Energy Systems Analysis SlidesTiago HenriquesОценок пока нет
- Applied Thermal Engineering: Minje Park, Daebong Jung, Minjae Kim, Kyoungdoug MinДокумент9 страницApplied Thermal Engineering: Minje Park, Daebong Jung, Minjae Kim, Kyoungdoug MinTiago HenriquesОценок пока нет
- EM P 05 Energy Systems Analysis SlidesДокумент14 страницEM P 05 Energy Systems Analysis SlidesTiago HenriquesОценок пока нет
- EM P 12 MicrogenerationДокумент7 страницEM P 12 MicrogenerationTiago HenriquesОценок пока нет
- 2935 0724 30 - tcm30-1628027Документ54 страницы2935 0724 30 - tcm30-1628027Hossam Mohi EldinОценок пока нет
- Atlas Copco RH 656 PartsДокумент16 страницAtlas Copco RH 656 PartsTiago HenriquesОценок пока нет
- EM P 09 Process Input-Output Analysis SlidesДокумент12 страницEM P 09 Process Input-Output Analysis SlidesTiago HenriquesОценок пока нет
- EM P 06 Energy Systems Analysis SlidesДокумент14 страницEM P 06 Energy Systems Analysis SlidesTiago HenriquesОценок пока нет
- EM P 08 Process Input-Output Analysis SlidesДокумент16 страницEM P 08 Process Input-Output Analysis SlidesTiago HenriquesОценок пока нет
- EM P 03 Energy Prices SlidesДокумент14 страницEM P 03 Energy Prices SlidesTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- EM P 01 Energy Statistics & Emergy Prices SlidesДокумент49 страницEM P 01 Energy Statistics & Emergy Prices SlidesTiago HenriquesОценок пока нет
- EM P 01 Energy Statistics SlidesДокумент40 страницEM P 01 Energy Statistics SlidesTiago HenriquesОценок пока нет
- Energy Management Diagrams and AnalysisДокумент4 страницыEnergy Management Diagrams and AnalysisTiago HenriquesОценок пока нет
- EM P 02 Assignment 1 Example SlidesДокумент11 страницEM P 02 Assignment 1 Example SlidesTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- EM P 06 Energy Systems Analysis SlidesДокумент14 страницEM P 06 Energy Systems Analysis SlidesTiago HenriquesОценок пока нет
- EM Ass 04 Annex 2 DataДокумент3 страницыEM Ass 04 Annex 2 DataTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- EM Ass 04Документ1 страницаEM Ass 04Tiago HenriquesОценок пока нет
- S Intermediate Input Final DemandДокумент2 страницыS Intermediate Input Final DemandTiago HenriquesОценок пока нет
- S Intermediate Input Final Demand: 0 #Value! #Value!Документ2 страницыS Intermediate Input Final Demand: 0 #Value! #Value!Tiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- Energy Management AssignmentДокумент1 страницаEnergy Management AssignmentTiago HenriquesОценок пока нет
- Cati Pakistan Training Course - MechanicalДокумент13 страницCati Pakistan Training Course - MechanicalImam Haryadi WibowoОценок пока нет
- Heat Transfer Chapter 1 IntroductionДокумент68 страницHeat Transfer Chapter 1 IntroductionsubratorajОценок пока нет
- Stp417-Eb 5820 PDFДокумент219 страницStp417-Eb 5820 PDFS R Kumar KonathalaОценок пока нет
- Heat and Temperature Unit3 - T4 - T6 PDFДокумент28 страницHeat and Temperature Unit3 - T4 - T6 PDFhiren_mistry55Оценок пока нет
- Numerical Programming I (For CSE) : Final ExamДокумент7 страницNumerical Programming I (For CSE) : Final ExamhisuinОценок пока нет
- API 510 Pressure Vessel Inspector Certification Preparation CourseДокумент4 страницыAPI 510 Pressure Vessel Inspector Certification Preparation CoursejbsantoОценок пока нет
- Maths IA IntroДокумент20 страницMaths IA Introshakthi aravinthОценок пока нет
- PEGN 419 / GPGN 419 Spring 2017: Manika Prasad Mansur Ermila Expert Resource: Robert LieberДокумент30 страницPEGN 419 / GPGN 419 Spring 2017: Manika Prasad Mansur Ermila Expert Resource: Robert LiebertahermohОценок пока нет
- Journal of Environmental Sciences research on morphology changes of coking coal during cokingДокумент4 страницыJournal of Environmental Sciences research on morphology changes of coking coal during cokingJohan Pranata BarusОценок пока нет
- PNA Chemistry Expedite 8900 User's GuideДокумент114 страницPNA Chemistry Expedite 8900 User's GuideJohnОценок пока нет
- Fluent 6.0 Staff Training Combustion and DPMДокумент30 страницFluent 6.0 Staff Training Combustion and DPMZakManОценок пока нет
- Reviewer in Electricity and MagnetismДокумент3 страницыReviewer in Electricity and MagnetismWayne David C. PadullonОценок пока нет
- The Basics of General, Organic and Biological Chemistry - AttributedДокумент1 421 страницаThe Basics of General, Organic and Biological Chemistry - AttributedAlfonso J Sintjago100% (2)
- Assignment 1Документ3 страницыAssignment 1V V Swarat Sasa50% (2)
- Evaluation of Structural Efficiency of Steel Diagrid Systems For Multi-Storey BuildingsДокумент4 страницыEvaluation of Structural Efficiency of Steel Diagrid Systems For Multi-Storey BuildingsPrateek ModyОценок пока нет
- How To Mathematics Organize Patterns in The World?Документ3 страницыHow To Mathematics Organize Patterns in The World?johnmartin sabiliОценок пока нет
- Concrete Technology Internal Assessment QuestionsДокумент2 страницыConcrete Technology Internal Assessment QuestionsSubodh AdhikariОценок пока нет
- Stainless Steel PropertiesДокумент3 страницыStainless Steel Propertieskiwanis_lamОценок пока нет
- The Law of OneДокумент745 страницThe Law of OneSuprakash100% (18)
- Astronomy Unit Resources SchoolpointeДокумент17 страницAstronomy Unit Resources SchoolpointeShekel DeninoОценок пока нет
- Resistivity and Saturation in ShalesДокумент6 страницResistivity and Saturation in ShalesAngelMesoОценок пока нет
- LECTURE 3 - Shear Stress & Allowable StressДокумент15 страницLECTURE 3 - Shear Stress & Allowable StressIhab OmarОценок пока нет
- Star and GalaxiesДокумент32 страницыStar and GalaxiesMazura AhmadОценок пока нет
- Bearings ShaftsДокумент74 страницыBearings ShaftsCik MinnОценок пока нет
- BelowsДокумент35 страницBelowstejassidhpuraОценок пока нет
- Comparing Effective Surface Areas of Random PackingsДокумент10 страницComparing Effective Surface Areas of Random PackingsAntonio MezzopreteОценок пока нет
- SPE 122225 Gas Condensate Productivity Improvement by Chemical Wettability AlterationДокумент12 страницSPE 122225 Gas Condensate Productivity Improvement by Chemical Wettability AlterationGabriel EduardoОценок пока нет
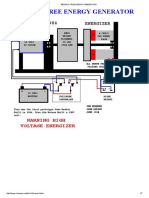
- Bedini's Free Energy Generator PDFДокумент7 страницBedini's Free Energy Generator PDFRafly Attila Al-Fiqri71% (7)
- Ch15 Differential Momentum BalanceДокумент20 страницCh15 Differential Momentum Balance89kkОценок пока нет
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseОт EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseРейтинг: 4.5 из 5 звезд4.5/5 (50)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionОт EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsОт EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsОт EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsОценок пока нет
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationОт EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationРейтинг: 4 из 5 звезд4/5 (18)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedОт EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedРейтинг: 5 из 5 звезд5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionОт EverandThe Laws of Thermodynamics: A Very Short IntroductionРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Handbook of Mechanical and Materials EngineeringОт EverandHandbook of Mechanical and Materials EngineeringРейтинг: 5 из 5 звезд5/5 (4)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionОт EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionРейтинг: 2.5 из 5 звезд2.5/5 (3)
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationОт EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationРейтинг: 1 из 5 звезд1/5 (1)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- Waves and Beaches: The Powerful Dynamics of Sea and CoastОт EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastРейтинг: 4 из 5 звезд4/5 (1)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideОт Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideРейтинг: 3.5 из 5 звезд3.5/5 (7)
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeОт EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeРейтинг: 3.5 из 5 звезд3.5/5 (4)
- Operational Amplifier Circuits: Analysis and DesignОт EverandOperational Amplifier Circuits: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (2)