Вам также может понравиться
- Quadrature Encoder InterfaceДокумент22 страницыQuadrature Encoder InterfaceCarlos Alberto Venancio PerezОценок пока нет
- Section 15 QuadratureEncoderInterface (QEI)Документ24 страницыSection 15 QuadratureEncoderInterface (QEI)Abraham MuñozОценок пока нет
- Section 15. Quadrature Encoder Interface (QEI) HighlightsДокумент35 страницSection 15. Quadrature Encoder Interface (QEI) HighlightsSourabh KhandelwalОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Rotary EncoderДокумент6 страницRotary EncoderalesysОценок пока нет
- Econder MicrochipДокумент12 страницEconder MicrochipSandra MarkivОценок пока нет
- Dspic30F6010 Quadrature Encoder Interface (Qei) ModuleДокумент14 страницDspic30F6010 Quadrature Encoder Interface (Qei) ModuleSourabh KhandelwalОценок пока нет
- Microprocessor Architectures and Systems: RISC, CISC and DSPОт EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPРейтинг: 4 из 5 звезд4/5 (1)
- Using Quadrature Encoders With E Series DAQ Boards: Application Note 084Документ11 страницUsing Quadrature Encoders With E Series DAQ Boards: Application Note 084Heriberto Flores AmpieОценок пока нет
- Programmable Logic Controllers: A Practical Approach to IEC 61131-3 using CoDeSysОт EverandProgrammable Logic Controllers: A Practical Approach to IEC 61131-3 using CoDeSysОценок пока нет
- Counters and Shift RegДокумент24 страницыCounters and Shift RegRakesh Kumar D100% (1)
- ARM Microcontrollers Programming for Embedded SystemsОт EverandARM Microcontrollers Programming for Embedded SystemsРейтинг: 5 из 5 звезд5/5 (1)
- Pourquoi Utilser Signal Conditioner LS7084Документ4 страницыPourquoi Utilser Signal Conditioner LS7084bientinhxanhthamОценок пока нет
- Count and Registers GuideДокумент31 страницаCount and Registers GuideBharadwaja PisupatiОценок пока нет
- Avr ArchitectureДокумент29 страницAvr ArchitectureOdoch HerbertОценок пока нет
- 74LS193Документ8 страниц74LS193Luis Alberto Villa ChávezОценок пока нет
- X7083, X7043 and X7023 Pulse GeneratorsДокумент70 страницX7083, X7043 and X7023 Pulse GeneratorskristechnikОценок пока нет
- 74163Документ12 страниц74163Obenelia MartinezОценок пока нет
- HCTL 2017Документ12 страницHCTL 2017ivancho1070Оценок пока нет
- Counter VHDLДокумент12 страницCounter VHDLbparthageneОценок пока нет
- 74AC161-Synchronous Presettable Binary CounterДокумент11 страниц74AC161-Synchronous Presettable Binary CounterbmmostefaОценок пока нет
- Counters and Shift Registers: - Sipo - PisoДокумент52 страницыCounters and Shift Registers: - Sipo - PisoSathish KumarОценок пока нет
- Electronica - Servo Control of A Dc-Brush Motor An532Документ89 страницElectronica - Servo Control of A Dc-Brush Motor An532Ismael 8877Оценок пока нет
- Introduction To MSP430 MicrocontrollersДокумент32 страницыIntroduction To MSP430 MicrocontrollersAlejandro OrtizОценок пока нет
- Datasheet m37512Документ87 страницDatasheet m37512ALFAKОценок пока нет
- Report - RFid Based Security SystemДокумент46 страницReport - RFid Based Security SystemDhaval Rana50% (6)
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosДокумент24 страницыNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierОценок пока нет
- Final Report On Line Follower RobotДокумент44 страницыFinal Report On Line Follower RobotAjay Verma50% (4)
- Data SheetДокумент18 страницData SheetDidit Andhika SubrataОценок пока нет
- TMS320F2812-Analogue To Digital ConverterДокумент26 страницTMS320F2812-Analogue To Digital ConverterPantech ProLabs India Pvt LtdОценок пока нет
- What Is Axle CounterДокумент23 страницыWhat Is Axle CounterPrabhat SharmaОценок пока нет
- CPR E 381x/382x Lab11aДокумент10 страницCPR E 381x/382x Lab11aHelenОценок пока нет
- Chapter 6 - QEI ModuleДокумент14 страницChapter 6 - QEI ModulenamОценок пока нет
- Presettable Bcd/Decade Up/Down Counter Presettable 4-Bit Binary Up/Down Counter SN54/74LS192 SN54/74LS193Документ9 страницPresettable Bcd/Decade Up/Down Counter Presettable 4-Bit Binary Up/Down Counter SN54/74LS192 SN54/74LS193EDERTREVISANОценок пока нет
- Exp 12) Prbs Generator and Shift RegisterДокумент5 страницExp 12) Prbs Generator and Shift RegisterMani BharathiОценок пока нет
- Function/Function Block LibrariesДокумент23 страницыFunction/Function Block LibrariesmasimeriseОценок пока нет
- EE 202 Digital Electronics Chapter 5: Counters and Sequential CircuitsДокумент59 страницEE 202 Digital Electronics Chapter 5: Counters and Sequential CircuitsSyazreen RahmanОценок пока нет
- Timer Counter AVRДокумент105 страницTimer Counter AVRفايزميلي الأبد100% (1)
- 8-Bit Single Chip Microcontroller LC87F67C8AДокумент27 страниц8-Bit Single Chip Microcontroller LC87F67C8AAlbert GTОценок пока нет
- LPC 2129Документ34 страницыLPC 2129piyushji125Оценок пока нет
- LC863224AДокумент21 страницаLC863224AJose SintuОценок пока нет
- 74LS90 Contador AsincronoДокумент7 страниц74LS90 Contador AsincronoFISRAELGRОценок пока нет
- 74F191Документ8 страниц74F191Alexandre S. CorrêaОценок пока нет
- 74164Документ4 страницы74164milkyway69Оценок пока нет
- Train Speed Control F S KДокумент54 страницыTrain Speed Control F S KDivya SantoshiОценок пока нет
- 15-inch Monitor SpecsДокумент49 страниц15-inch Monitor Specsfvb_spamОценок пока нет
- BCD Decade/Modulo 16 Binary Synchronous Bi-Directional Counters SN54/74LS168 SN54/74LS169Документ6 страницBCD Decade/Modulo 16 Binary Synchronous Bi-Directional Counters SN54/74LS168 SN54/74LS169Ariel HdezОценок пока нет
- Synchronous Counter Design and AnalysisДокумент12 страницSynchronous Counter Design and AnalysisRajasekar PichaimuthuОценок пока нет
- 74LS93Документ9 страниц74LS93John RedwindОценок пока нет
- AN #35 - Low Cost LCD Frequency MeterДокумент6 страницAN #35 - Low Cost LCD Frequency Meterarroyo62Оценок пока нет
- Presettable BCD and Binary Up/Down CountersДокумент8 страницPresettable BCD and Binary Up/Down CountersWakku FernandezОценок пока нет
- Power Point PresentationДокумент17 страницPower Point PresentationVОценок пока нет
- Training Chasis NA7D - AДокумент40 страницTraining Chasis NA7D - Ajulio gamboaОценок пока нет
- LSДокумент8 страницLSBrzata Ptica100% (1)
- Dspic30F6010 Quadrature Encoder Interface (Qei) ModuleДокумент14 страницDspic30F6010 Quadrature Encoder Interface (Qei) ModuleSourabh KhandelwalОценок пока нет
- 240 2011-04-23 360395Документ43 страницы240 2011-04-23 360395Sourabh KhandelwalОценок пока нет
- Dspic30F6010 Motor Control PWMДокумент34 страницыDspic30F6010 Motor Control PWMSourabh KhandelwalОценок пока нет
- WWW - Ntpc.co - in Index - PHP OptionДокумент1 страницаWWW - Ntpc.co - in Index - PHP OptionSourabh KhandelwalОценок пока нет
- WWW - Ntpc.co - in Index - PHP OptionДокумент1 страницаWWW - Ntpc.co - in Index - PHP OptionSourabh KhandelwalОценок пока нет
- L2. Single Phase Ac Voltage ControllersДокумент102 страницыL2. Single Phase Ac Voltage ControllersSourabh KhandelwalОценок пока нет
- L4. threephaseACcontrollersNewДокумент84 страницыL4. threephaseACcontrollersNewSourabh KhandelwalОценок пока нет
- L3. Single Phase Ac Voltage ControllersДокумент68 страницL3. Single Phase Ac Voltage ControllersSourabh KhandelwalОценок пока нет
- WWW - Irctc.co - in Cgi-Bin Bv60.Dll Irctc Services PrintTiДокумент1 страницаWWW - Irctc.co - in Cgi-Bin Bv60.Dll Irctc Services PrintTiSourabh KhandelwalОценок пока нет
- AceДокумент6 страницAceSourabh KhandelwalОценок пока нет
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringДокумент6 страницIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalОценок пока нет
- Networking Question Answer InterviewДокумент10 страницNetworking Question Answer InterviewSourabh KhandelwalОценок пока нет
- 240 2011-04-23 360395Документ43 страницы240 2011-04-23 360395Sourabh KhandelwalОценок пока нет
- AceДокумент6 страницAceSourabh KhandelwalОценок пока нет
- GATE - 2014 TestДокумент9 страницGATE - 2014 TestShivanshscribdОценок пока нет
- Hindalco Summer Training REPORT ELECTRICAL EngineeringДокумент61 страницаHindalco Summer Training REPORT ELECTRICAL EngineeringSourabh Khandelwal100% (6)
- 4 4Документ5 страниц4 4Sourabh KhandelwalОценок пока нет
- Jaicorp Summer Training REPORT ELECTRICAL ENGINEERINGДокумент62 страницыJaicorp Summer Training REPORT ELECTRICAL ENGINEERINGSourabh KhandelwalОценок пока нет
- Basic Hyd PropДокумент7 страницBasic Hyd PropSourabh KhandelwalОценок пока нет
- WWW - Irctc.co - in Cgi-Bin Bv60.Dll Irctc Services PrintTiДокумент1 страницаWWW - Irctc.co - in Cgi-Bin Bv60.Dll Irctc Services PrintTiSourabh KhandelwalОценок пока нет
- Dmrcest Pages DMRC GATE CHALLANДокумент1 страницаDmrcest Pages DMRC GATE CHALLANManisha KumariОценок пока нет
- Basic Hyd Elect.Документ10 страницBasic Hyd Elect.Sourabh KhandelwalОценок пока нет
- Centre For Research and Industrial Staff PerformanceДокумент4 страницыCentre For Research and Industrial Staff PerformanceSourabh KhandelwalОценок пока нет
- Valve Basics: 1.1 Actuating Force: Centre For Research and Industrial Staff PerformanceДокумент6 страницValve Basics: 1.1 Actuating Force: Centre For Research and Industrial Staff PerformanceSourabh KhandelwalОценок пока нет
- Basic 2Документ3 страницыBasic 2Sourabh KhandelwalОценок пока нет
- Centre For Research and Industrial Staff PerformanceДокумент5 страницCentre For Research and Industrial Staff PerformanceSourabh KhandelwalОценок пока нет
- Basic of Electrical12 EnggДокумент52 страницыBasic of Electrical12 EnggSourabh KhandelwalОценок пока нет
- Basic Electrical DefinitionДокумент7 страницBasic Electrical DefinitionEmerly Macam GorospeОценок пока нет
- Doc. 9684 SSRДокумент251 страницаDoc. 9684 SSRcontroladoraereo100% (9)
- REF Stabilizing Resistor CalculationsДокумент8 страницREF Stabilizing Resistor CalculationsmaheshОценок пока нет
- Application Note EMI EMC of PCB in Automotive SystemsДокумент2 страницыApplication Note EMI EMC of PCB in Automotive SystemsSanthosh LingappaОценок пока нет
- Fiat Barchetta: EngineДокумент20 страницFiat Barchetta: EngineHallex OliveiraОценок пока нет
- 14Φ Series Metal Oxide Varistor (MOV) Data Sheet: FeaturesДокумент12 страниц14Φ Series Metal Oxide Varistor (MOV) Data Sheet: Featuresirensy vivasОценок пока нет
- Setting Crossovers in An AVR - Pre-Pro With Dirac Live 2 Room CorrectionДокумент5 страницSetting Crossovers in An AVR - Pre-Pro With Dirac Live 2 Room CorrectionstudskirbyОценок пока нет
- C100 Service Training Manual: 3.2L Engine Mechanical Participant HandbookДокумент54 страницыC100 Service Training Manual: 3.2L Engine Mechanical Participant Handbooksertex_jo83% (6)
- A819 PDFДокумент4 страницыA819 PDFjpauloaliancaОценок пока нет
- Java Fire Alarm SystemДокумент3 страницыJava Fire Alarm SystemKomal KashyapОценок пока нет
- Microprocessors Unit IIДокумент47 страницMicroprocessors Unit IISheikh Noor MohammadОценок пока нет
- Symbol Master Multi-Pass Symbolic Disassembler Manual V2.0 (Feb 2 1986)Документ68 страницSymbol Master Multi-Pass Symbolic Disassembler Manual V2.0 (Feb 2 1986)weirdocolectorОценок пока нет
- 132/11kV Substation Standard Cable ScheduleДокумент28 страниц132/11kV Substation Standard Cable ScheduleBilal JavaidОценок пока нет
- PSpice Simulation of Basic DC CircuitsДокумент11 страницPSpice Simulation of Basic DC CircuitsArifuzzamanFaisalОценок пока нет
- SY-8100 Manual OperacionДокумент36 страницSY-8100 Manual OperacionJOse ArmentaОценок пока нет
- Government Polytechnic Unit Test I: Questions on Environment, InstrumentsДокумент3 страницыGovernment Polytechnic Unit Test I: Questions on Environment, Instrumentssanskar andhareОценок пока нет
- Re17Lamw: Product Data SheetДокумент6 страницRe17Lamw: Product Data SheetMuhammad Lathieful HaqОценок пока нет
- Kinetic 5700 Driver ConnectorsДокумент144 страницыKinetic 5700 Driver ConnectorsSamuel OliveiraОценок пока нет
- Rail to Rail Op-Amps from STMicroelectronicsДокумент10 страницRail to Rail Op-Amps from STMicroelectronicsantonio170172Оценок пока нет
- Development and Test of An Experimental Hybrid Sounding RocketДокумент10 страницDevelopment and Test of An Experimental Hybrid Sounding RocketLeo LonardelliОценок пока нет
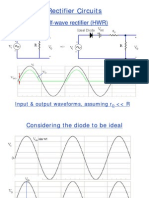
- Rectifier Circuits: Half-Wave Rectifier (HWR)Документ18 страницRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifОценок пока нет
- Handheld Scanner Series BCS 3600: User ManualДокумент110 страницHandheld Scanner Series BCS 3600: User ManualAhmad IbrahimОценок пока нет
- Philips 70fc930 Cassette Deck Service Manual (Indexed)Документ55 страницPhilips 70fc930 Cassette Deck Service Manual (Indexed)Ugo RampazzoОценок пока нет
- Datasheet Radar LevelДокумент98 страницDatasheet Radar LevelHandrew KharismaОценок пока нет
- XC6204/XC6205: General DescriptionДокумент51 страницаXC6204/XC6205: General DescriptionMilan ĐorđevicОценок пока нет
- Owner's Manual: Bridgeable Power AmplifierДокумент64 страницыOwner's Manual: Bridgeable Power AmplifiervanderleySCLОценок пока нет
- An Introduction To Graphene Plasmonics - Gonçalves, NunesДокумент457 страницAn Introduction To Graphene Plasmonics - Gonçalves, NunesLeonardo Marcelino100% (2)
- PnpdevsДокумент85 страницPnpdevsŽīã ÝãďãvОценок пока нет
- Bright New 42-inch and 47-inch FULL-HD LCD Displays for SignageДокумент2 страницыBright New 42-inch and 47-inch FULL-HD LCD Displays for SignageKerrin HardyОценок пока нет
- Xiaomi becomes world's third largest smartphone makerДокумент8 страницXiaomi becomes world's third largest smartphone makerBodaKatalinОценок пока нет
- Chip War: The Quest to Dominate the World's Most Critical TechnologyОт EverandChip War: The Quest to Dominate the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (227)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XОт EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XРейтинг: 3 из 5 звезд3/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102От EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Рейтинг: 5 из 5 звезд5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyОт EverandChip War: The Fight for the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (82)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002От EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Рейтинг: 5 из 5 звезд5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionОт Everand8051 Microcontroller: An Applications Based IntroductionРейтинг: 5 из 5 звезд5/5 (6)
- Amazon Web Services (AWS) Interview Questions and AnswersОт EverandAmazon Web Services (AWS) Interview Questions and AnswersРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Dancing with Qubits: How quantum computing works and how it can change the worldОт EverandDancing with Qubits: How quantum computing works and how it can change the worldРейтинг: 5 из 5 звезд5/5 (1)
- Model-based System and Architecture Engineering with the Arcadia MethodОт EverandModel-based System and Architecture Engineering with the Arcadia MethodОценок пока нет
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxОт EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxОценок пока нет
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsОт EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsРейтинг: 4.5 из 5 звезд4.5/5 (49)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneОт EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneОценок пока нет
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersОт Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersОценок пока нет
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesОт EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesОценок пока нет