Вам также может понравиться
- Basics Hydraulics and Electrics e PDFДокумент103 страницыBasics Hydraulics and Electrics e PDFAdal VeraОценок пока нет
- Hydraulic Training Wirgent DocumentДокумент79 страницHydraulic Training Wirgent DocumentNguyen Ngoc100% (15)
- Training Hydraulic CircuitsДокумент24 страницыTraining Hydraulic CircuitsElmith100% (3)
- Hydraulics TrainingДокумент47 страницHydraulics Trainingmdhyderali100% (4)
- Super 1900-3Документ21 страницаSuper 1900-3Edgar Huaraya Condori100% (1)
- VOGELE Technical Training - Spray JetДокумент171 страницаVOGELE Technical Training - Spray JetCui71% (14)
- Big SkiДокумент12 страницBig SkiAlberjose Sanchez Ruiz100% (3)
- Instruction Manual Instruction Manual: Operating & Maintenance Operating & MaintenanceДокумент174 страницыInstruction Manual Instruction Manual: Operating & Maintenance Operating & MaintenanceErmias100% (2)
- Moba-MATIC 1 CAN, MOBA-MINI-MATIC PDFДокумент80 страницMoba-MATIC 1 CAN, MOBA-MINI-MATIC PDFtaufiqhartoОценок пока нет
- VOGELE Technical Training Spray JetДокумент171 страницаVOGELE Technical Training Spray JetAbdallah Miidoune100% (2)
- BW177-213-226 Series 4 Service TrainingДокумент182 страницыBW177-213-226 Series 4 Service Trainingze_fcc77% (22)
- PB Super 1800-3 en PDFДокумент20 страницPB Super 1800-3 en PDFRebel muna 143Оценок пока нет
- D8R Ii Serv1736 SlidesДокумент112 страницD8R Ii Serv1736 SlidesArnold Quispe C100% (2)
- BOMAG Roller BW161-203AD-4-ST-ENДокумент178 страницBOMAG Roller BW161-203AD-4-ST-ENCui100% (16)
- Hydraulic Proportional Closed Loop System Design PDFДокумент86 страницHydraulic Proportional Closed Loop System Design PDFragdapattice100% (7)
- Electrical TrainingДокумент28 страницElectrical Trainingmdhyderali100% (4)
- BAL XXAB 2313870 00 00 00 enДокумент123 страницыBAL XXAB 2313870 00 00 00 enIvica ŠućurОценок пока нет
- Moba Matic DigitalДокумент72 страницыMoba Matic Digitalmartin_powell_15100% (1)
- Tana Gseries Ho C110304enДокумент65 страницTana Gseries Ho C110304enNguyen Ngoc100% (1)
- 2017 Industrial Hydraulics & Pneumatics Reference ManualДокумент115 страниц2017 Industrial Hydraulics & Pneumatics Reference ManualFati Mah100% (2)
- Load Sensing Valve TheoryДокумент12 страницLoad Sensing Valve TheorySammy Ulita100% (1)
- Hydraulics TrainingДокумент115 страницHydraulics TrainingAnwar Ali Khan100% (9)
- BW 120-4 English Service TrainingДокумент107 страницBW 120-4 English Service Trainingmauriciolapierre100% (3)
- Hamm RollerДокумент192 страницыHamm RollerNguyen Ngoc88% (42)
- Training Basic HydraulicsДокумент50 страницTraining Basic Hydraulicssalicurri88% (8)
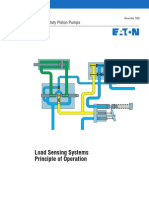
- Load Sensing Syst. Princ Oper. EatonДокумент28 страницLoad Sensing Syst. Princ Oper. EatonPedro Blanco92% (12)
- Mobile Hydraulic TrainingДокумент16 страницMobile Hydraulic TrainingMuhammad Imran Aftab100% (3)
- Short Instruction Niveltronic Plus - EN PDFДокумент2 страницыShort Instruction Niveltronic Plus - EN PDFIvica ŠućurОценок пока нет
- AC60 Training Manual Intranet1.3 PDFДокумент954 страницыAC60 Training Manual Intranet1.3 PDFDemagUral50% (2)
- Paver SUPER 1800-3 BrochureДокумент22 страницыPaver SUPER 1800-3 BrochureMohammad Younes100% (1)
- SUPER-1800 Training Machine Technology enДокумент422 страницыSUPER-1800 Training Machine Technology enmdhyderali100% (22)
- Leseprobe enДокумент60 страницLeseprobe enphankhoa83Оценок пока нет
- Training Manual On Turbine: Hydrulic ComponentsДокумент54 страницыTraining Manual On Turbine: Hydrulic ComponentsSubham ChakrabortyОценок пока нет
- DYNAPAC F 150 C 769130 - SpecificationДокумент254 страницыDYNAPAC F 150 C 769130 - Specificationhoan100% (2)
- VOGELE 2100 2 ELECTRONIC Diagram PDFДокумент64 страницыVOGELE 2100 2 ELECTRONIC Diagram PDFKlaal100% (1)
- Hydraulics Drivelinedatabook PDFДокумент52 страницыHydraulics Drivelinedatabook PDFViji SvrОценок пока нет
- BAL 0819 2260023 00 00 00 enДокумент325 страницBAL 0819 2260023 00 00 00 enIvica Šućur100% (7)
- Terminadora de Asfalto Vogele 1800-2Документ14 страницTerminadora de Asfalto Vogele 1800-2Vladimir Illich Pinzon100% (4)
- Load SensingДокумент27 страницLoad SensingRobert Gordon100% (6)
- SUPER 1900-3i: Highway ClassДокумент22 страницыSUPER 1900-3i: Highway ClassТракия Билд0% (2)
- Industrial Hydraulics ManualДокумент337 страницIndustrial Hydraulics Manualbabin t100% (8)
- BOMAG Roller BW161 203AD 4 ST ENДокумент178 страницBOMAG Roller BW161 203AD 4 ST ENLieLiec CriStianto100% (3)
- DF145CS PLC Omm03 GBДокумент180 страницDF145CS PLC Omm03 GBhitman7788Оценок пока нет
- ABG8820-En Service ManualДокумент103 страницыABG8820-En Service ManualCui100% (6)
- Pump Hydraulic System..Документ8 страницPump Hydraulic System..brahim100% (3)
- Centre For Research and Industrial Staff PerformanceДокумент5 страницCentre For Research and Industrial Staff PerformanceSourabh KhandelwalОценок пока нет
- Hydraulics Module2 Student VersionДокумент13 страницHydraulics Module2 Student VersionvozoscribdОценок пока нет
- Hydraulics in Building Systems 8353 HQ enДокумент58 страницHydraulics in Building Systems 8353 HQ enbatazivoОценок пока нет
- PumpДокумент25 страницPump최승원100% (1)
- Hidraulica de Tuberias J P TelliusДокумент271 страницаHidraulica de Tuberias J P TelliusDanny Garcia100% (1)
- Chapter 8: Flow in Pipes ME 331 - Fluid Dynamics: Spring 2008Документ31 страницаChapter 8: Flow in Pipes ME 331 - Fluid Dynamics: Spring 2008AmexTesfayeKoraОценок пока нет
- PDFДокумент4 страницыPDFMuhammad Imdad HussainОценок пока нет
- Mechatronics Lab ManualДокумент54 страницыMechatronics Lab ManualAjay Chacko100% (1)
- Doe Fundamentals Handbook Instrumentation and ControlДокумент34 страницыDoe Fundamentals Handbook Instrumentation and Controlmoath1Оценок пока нет
- Pressure Loss in PipeДокумент8 страницPressure Loss in PipesaeidianОценок пока нет
- Dokumen - Tips Hydraulics and Pneumatics Lab1Документ27 страницDokumen - Tips Hydraulics and Pneumatics Lab1Harinath CОценок пока нет
- Control Valve Selection For Hydraulic SystemsДокумент7 страницControl Valve Selection For Hydraulic SystemszodedОценок пока нет
- L-5 Hyd, CKT Design & AnalysisДокумент25 страницL-5 Hyd, CKT Design & Analysisgebremicael legesseОценок пока нет
- Tornado Datasheet en 074 TirasoftДокумент2 страницыTornado Datasheet en 074 Tirasoftmacao100100% (1)
- Sin Beam Applications 2Документ16 страницSin Beam Applications 2macao100Оценок пока нет
- ThingWorx Innovation PDFДокумент24 страницыThingWorx Innovation PDFmacao100100% (1)
- A Novel Method of Hydrogen Generation by Water ElectrolysisДокумент5 страницA Novel Method of Hydrogen Generation by Water Electrolysisapi-26235400Оценок пока нет
- Ruckus Product GuideДокумент3 страницыRuckus Product Guidemacao100Оценок пока нет
- Waviot WVT Rm130 DatasheetДокумент4 страницыWaviot WVT Rm130 Datasheetmacao100Оценок пока нет
- Ti Lpwan Narrowband Vs Coding GainДокумент8 страницTi Lpwan Narrowband Vs Coding Gainmacao100Оценок пока нет
- Devices - TraccarДокумент32 страницыDevices - Traccarmacao100100% (1)
- TV White SpaceДокумент4 страницыTV White SpaceMohcin SarrarОценок пока нет
- Waviot Rm141 Reference DesignДокумент11 страницWaviot Rm141 Reference Designmacao100Оценок пока нет
- TV White SpaceДокумент4 страницыTV White SpaceMohcin SarrarОценок пока нет
- Bcoe Tvws Trial November 2014 Final LockedДокумент48 страницBcoe Tvws Trial November 2014 Final Lockedmacao100Оценок пока нет
- Introducing TV White Spaces: Welcome ToДокумент33 страницыIntroducing TV White Spaces: Welcome Tomacao100Оценок пока нет
- Ti Lpwan Narrowband Vs Coding GainДокумент8 страницTi Lpwan Narrowband Vs Coding Gainmacao100Оценок пока нет
- Cinema Fv-5 The Official User GuideДокумент36 страницCinema Fv-5 The Official User Guidemacao100Оценок пока нет
- Configuration Guide - QoS (V600R003C00 - 02)Документ491 страницаConfiguration Guide - QoS (V600R003C00 - 02)Ciprian MargineanОценок пока нет
- E-Rake Go The Extra Mile OFDM Multi Hops RepeaterДокумент9 страницE-Rake Go The Extra Mile OFDM Multi Hops Repeatermacao100Оценок пока нет
- ConfigurationGuide Meraki SolarwindsSNMPДокумент28 страницConfigurationGuide Meraki SolarwindsSNMPmacao100100% (1)
- Meraki Whitepaper CMXДокумент17 страницMeraki Whitepaper CMXmacao100Оценок пока нет
- Intro To LTEДокумент78 страницIntro To LTEAndrea StefanelliОценок пока нет
- Internet of ThingsДокумент40 страницInternet of ThingsUltimo GuerreroОценок пока нет
- Gigacampus Final ReportДокумент28 страницGigacampus Final Reportmacao100Оценок пока нет
- CMX Location Analytics - Meraki Dashboard - E-TRADE Hot-SpotДокумент1 страницаCMX Location Analytics - Meraki Dashboard - E-TRADE Hot-Spotmacao100Оценок пока нет
- 16 - WBA Industry Report 2011 - Global Developments in Public Wi-Fi 1.00Документ24 страницы16 - WBA Industry Report 2011 - Global Developments in Public Wi-Fi 1.00Hyoung-soo KimОценок пока нет
- WP 80211acInDepth PDFДокумент37 страницWP 80211acInDepth PDFNebiye SolomonОценок пока нет
- 1MA111 4E LTE Technology IntroductionДокумент115 страниц1MA111 4E LTE Technology IntroductionlteuserОценок пока нет
- Project PlanДокумент16 страницProject Planmacao100Оценок пока нет
- Meraki Whitepaper CMXДокумент17 страницMeraki Whitepaper CMXmacao100Оценок пока нет
- Fresadoras Atlas 2013Документ26 страницFresadoras Atlas 2013Elvis Eberth Huanca MachacaОценок пока нет
- Powerful Mini ExcavatorДокумент8 страницPowerful Mini ExcavatorShailesh Khodke100% (1)
- Sumitomo SCX1200Документ24 страницыSumitomo SCX1200Anonymous nXGOGxyeОценок пока нет
- Hydrostatic TransmissionsДокумент12 страницHydrostatic TransmissionsMohamed Rashed100% (1)
- Group 3 Swing Device: 1. StructureДокумент11 страницGroup 3 Swing Device: 1. StructureWarranty HeadОценок пока нет
- Parker F12Документ20 страницParker F12thierrylindo100% (3)
- 600 KN Towing Winch ManualДокумент173 страницы600 KN Towing Winch ManualMartellusОценок пока нет
- Section 7.1: Wheel Drive Circuit - General SystemДокумент33 страницыSection 7.1: Wheel Drive Circuit - General SystemАндрей ТарковскийОценок пока нет
- Zaxis-Series: Hydraulic ExcavatorДокумент20 страницZaxis-Series: Hydraulic ExcavatorvitaliyОценок пока нет
- 06 (1) Vol de Ran MedДокумент7 страниц06 (1) Vol de Ran MedLhau009Оценок пока нет
- Rock Drill PDFДокумент94 страницыRock Drill PDFfurkan84Оценок пока нет
- Manual Bomba EspumaДокумент108 страницManual Bomba EspumaFrancisco ManriquezОценок пока нет
- Rope Winches and Gearboxes PDFДокумент20 страницRope Winches and Gearboxes PDFannccknarime50% (2)
- Hydraulic Trainings For Axial Piston UnitsДокумент29 страницHydraulic Trainings For Axial Piston UnitsNBRellos100% (27)
- Rigs PresentationДокумент1 страницаRigs PresentationManish Kumar SharmaОценок пока нет
- AF-800 Series Automatic Hydraulic Self-Cleaning Screen FilterДокумент46 страницAF-800 Series Automatic Hydraulic Self-Cleaning Screen FilterLuongОценок пока нет
- V S C Sec C Cte Ve Va: Pressure Control ValvesДокумент13 страницV S C Sec C Cte Ve Va: Pressure Control Valvesfrederick alayonОценок пока нет
- Perforadora Voladura TMB20Документ4 страницыPerforadora Voladura TMB20eleon07Оценок пока нет
- Festo-Hydraulics Advanced LevelДокумент164 страницыFesto-Hydraulics Advanced Levelarm43994% (16)
- SK 50p - CompressedДокумент940 страницSK 50p - Compresseddaisar iman gea100% (1)
- Pullmaster Brochure PDFДокумент16 страницPullmaster Brochure PDFKSRОценок пока нет
- Electro-Hydraulic Lab ReportДокумент18 страницElectro-Hydraulic Lab Reportamir sabrinОценок пока нет
- Mechatronics lab report on hydraulic pump and actuatorsДокумент8 страницMechatronics lab report on hydraulic pump and actuatorsJerome SamuelОценок пока нет
- 123959707-Intermix Concrete Mixers TransmissionsДокумент53 страницы123959707-Intermix Concrete Mixers TransmissionsFilippos100% (1)
- KHT5500 ManualДокумент56 страницKHT5500 ManualFernando EncisoОценок пока нет
- Estructura de JiroДокумент11 страницEstructura de Jirolevinton jose tobias genesОценок пока нет
- Hydraulics and Pneumatics GuideДокумент65 страницHydraulics and Pneumatics GuidemanojОценок пока нет
- Service Manual: Cargo RangeДокумент120 страницService Manual: Cargo RangeBubu BubuОценок пока нет
- Cleanliness in Hydraulic SystemsДокумент217 страницCleanliness in Hydraulic SystemsSajeev NerurkarОценок пока нет
- Hydraulic Systems of Machine Tools: Components and OperationДокумент56 страницHydraulic Systems of Machine Tools: Components and OperationAli FaycalОценок пока нет