Вам также может понравиться
- UNIT - II - Major Systems in A Rocket & MissilesДокумент15 страницUNIT - II - Major Systems in A Rocket & MissilesmaniОценок пока нет
- Design and Development of Hand Brake SystemДокумент5 страницDesign and Development of Hand Brake SystemGRD Journals100% (1)
- 07 InvertedPendulumSystemДокумент10 страниц07 InvertedPendulumSystembgizachewОценок пока нет
- Principle of LVDT OperationДокумент4 страницыPrinciple of LVDT OperationivanОценок пока нет
- Wind Tunnel InroductionДокумент38 страницWind Tunnel Inroductionmich48chinОценок пока нет
- Aircraft Maintanence Engg Book 9A TypeДокумент139 страницAircraft Maintanence Engg Book 9A TypeimmortalforeverОценок пока нет
- Design, Analytical Analysis, Instrumentation and Flow Simulation of Sub-Sonic Open Circuit Wind Tunnel ModelДокумент10 страницDesign, Analytical Analysis, Instrumentation and Flow Simulation of Sub-Sonic Open Circuit Wind Tunnel ModelIJMERОценок пока нет
- Power Requirements of A VehicleДокумент32 страницыPower Requirements of A VehicleAvinashRaiОценок пока нет
- Fly by WireДокумент20 страницFly by WireAnurag RanaОценок пока нет
- National Aerospace Laboratories (Nal)Документ52 страницыNational Aerospace Laboratories (Nal)EdwinRativaОценок пока нет
- Tues 1545Документ38 страницTues 1545cypОценок пока нет
- Ae 6401 Aerodynamics1 Two MarksДокумент13 страницAe 6401 Aerodynamics1 Two MarksSun Heifer50% (2)
- Electrical Actuation SystemsДокумент54 страницыElectrical Actuation Systemsprashant_cool_4_uОценок пока нет
- 6dof SimulationДокумент19 страниц6dof Simulationritesh1986Оценок пока нет
- Bài 4 - Longitudinal Motion (Stick Fixed) (2008)Документ32 страницыBài 4 - Longitudinal Motion (Stick Fixed) (2008)Tuan Anh PhamОценок пока нет
- ASD362 2019 WTT3 Wind Tunnel Calibration PDFДокумент24 страницыASD362 2019 WTT3 Wind Tunnel Calibration PDFSharvaniОценок пока нет
- Robotic ArmДокумент8 страницRobotic ArmNoopur GandhiОценок пока нет
- Types of Drag On AircraftДокумент20 страницTypes of Drag On AircraftPramod DhaigudeОценок пока нет
- Unit 3Документ16 страницUnit 3Vasanth AradhyaОценок пока нет
- BEE Powerpoint Presentation-1Документ13 страницBEE Powerpoint Presentation-1Agnt HydraОценок пока нет
- SubsystemsДокумент6 страницSubsystemsSai Prasad Iyer JОценок пока нет
- Design of 2 Seated Fighter AircraftДокумент17 страницDesign of 2 Seated Fighter AircraftSudharshanОценок пока нет
- Apr 39 BДокумент2 страницыApr 39 Byasir509Оценок пока нет
- FIGURE P7.30: (A) Use Dimensional Analysis With The Assumption That The WingbeatДокумент6 страницFIGURE P7.30: (A) Use Dimensional Analysis With The Assumption That The Wingbeatmohamed ahmedОценок пока нет
- 1.2b Water Tunnel:: Fig 1.2: Trapezoidal Wing at The End of The Wind TunnelДокумент2 страницы1.2b Water Tunnel:: Fig 1.2: Trapezoidal Wing at The End of The Wind Tunnelirctcsbt6bimblikipilОценок пока нет
- 2010 RadioДокумент99 страниц2010 RadioVivek MurthyОценок пока нет
- Technical Standard Orders (TSO)Документ23 страницыTechnical Standard Orders (TSO)Mak Or0% (1)
- c1 Integrated CircuitДокумент19 страницc1 Integrated CircuitMohammad SyaharinОценок пока нет
- Fly by WireДокумент2 страницыFly by WireAmit VarmaОценок пока нет
- Condition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultДокумент6 страницCondition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultdimasairlanggaОценок пока нет
- Satellite Subsystems: Mikita Gandhi EC Department AditДокумент50 страницSatellite Subsystems: Mikita Gandhi EC Department AditmikitagandhiОценок пока нет
- EDFpart1 1Документ16 страницEDFpart1 1Anonymous 9KWAHowj5FОценок пока нет
- Electrical QuestionsДокумент122 страницыElectrical QuestionsBiju Mathson MathewОценок пока нет
- Validation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABДокумент6 страницValidation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABNancy RodriguezОценок пока нет
- Attitude Control of A QuadrotorДокумент6 страницAttitude Control of A QuadrotorGhada BeydounОценок пока нет
- Electric Motors and GeneratorsДокумент21 страницаElectric Motors and Generatorsaskartik3Оценок пока нет
- Thrust VectorДокумент1 страницаThrust VectorehsanОценок пока нет
- Vrabac UAVДокумент22 страницыVrabac UAVSandica DragosОценок пока нет
- Rockets and Missiles Question BankДокумент5 страницRockets and Missiles Question BankkannanОценок пока нет
- Military Aplication UavДокумент30 страницMilitary Aplication UavElena JelerОценок пока нет
- Arduino Managed Module For Automatic Ventillation of Vehicle InteriorsДокумент40 страницArduino Managed Module For Automatic Ventillation of Vehicle InteriorsPraveen KumarОценок пока нет
- FE Safe User Guide PDFДокумент430 страницFE Safe User Guide PDFbalijajagadish100% (1)
- Last MergedДокумент46 страницLast MergedMingle ClickОценок пока нет
- Longitudinal AutopilotДокумент62 страницыLongitudinal AutopilotSyed Shoaib FaridОценок пока нет
- Alçalma Kartları JeppДокумент1 289 страницAlçalma Kartları JeppferkutОценок пока нет
- LG SYSTEM ANALYSIS Safran Messier-BugattДокумент83 страницыLG SYSTEM ANALYSIS Safran Messier-Bugattmelvin ekboteОценок пока нет
- Indian Airlines FLT 605 Accident Report PDFДокумент156 страницIndian Airlines FLT 605 Accident Report PDFShuhada NabihaОценок пока нет
- Flight ControllerДокумент27 страницFlight Controllerprishu kotiyalОценок пока нет
- AER 504 Aerodynamics: Ryerson University Department of Aerospace EngineeringДокумент8 страницAER 504 Aerodynamics: Ryerson University Department of Aerospace EngineeringbatmanbittuОценок пока нет
- Design, Realization and Experimental Investigations Into The Performance Parameters of Air-BearingsДокумент9 страницDesign, Realization and Experimental Investigations Into The Performance Parameters of Air-BearingsJohn Vivian PrashantОценок пока нет
- Full Thesis PDFДокумент116 страницFull Thesis PDFAdrian SelgasОценок пока нет
- Air Data SystemДокумент15 страницAir Data SystemChouaib Ben Boubaker100% (1)
- TOV - 18ae56 (Updated Mod-1)Документ49 страницTOV - 18ae56 (Updated Mod-1)pavanОценок пока нет
- Need For Avionics in Civil, Military and Space SystemsДокумент2 страницыNeed For Avionics in Civil, Military and Space Systemskannanemail100% (1)
- Test For TWSДокумент32 страницыTest For TWSGjk ChaitanyaОценок пока нет
- DME - Anup GoelДокумент297 страницDME - Anup GoelRaghav NagpalОценок пока нет
- SchlierenДокумент14 страницSchlierenPhani Kiran VadlamaniОценок пока нет
- Ae 2301 - Flight DynamicsДокумент9 страницAe 2301 - Flight DynamicsRaja Selvaraj0% (1)
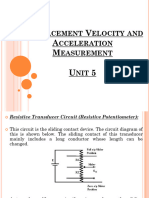
- Unit 5 Displacement, Velocity and Acceleration MeasurementДокумент26 страницUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7Оценок пока нет
- Turbo MachinesДокумент72 страницыTurbo MachinesAshley_Rulzzzzzzz100% (2)
- Applied Mechanics by RK RajputДокумент408 страницApplied Mechanics by RK Rajputsarthak100% (2)
- E Luwcj L: (Total Marks: 50Документ1 страницаE Luwcj L: (Total Marks: 50Ashley_RulzzzzzzzОценок пока нет
- Aeorodynamics of Rotor BladesДокумент23 страницыAeorodynamics of Rotor BladesAshley_RulzzzzzzzОценок пока нет
- Experiment No. - 9, 10 Aim Theory::: To Study SQL BasicsДокумент8 страницExperiment No. - 9, 10 Aim Theory::: To Study SQL BasicsAshley_RulzzzzzzzОценок пока нет
- Assignment 1Документ1 страницаAssignment 1Ashley_RulzzzzzzzОценок пока нет
- Subject: Mechanical Measurement & Metrology. Class: T.E. (Mech) Sem V Module 5 & 6Документ1 страницаSubject: Mechanical Measurement & Metrology. Class: T.E. (Mech) Sem V Module 5 & 6Ashley_RulzzzzzzzОценок пока нет
- Assignment 2011 1Документ1 страницаAssignment 2011 1Ashley_RulzzzzzzzОценок пока нет
- Subject: Mechanical Measurement & Metrology. Class: T.E. (Mech-B) Sem VДокумент1 страницаSubject: Mechanical Measurement & Metrology. Class: T.E. (Mech-B) Sem VAshley_RulzzzzzzzОценок пока нет
- Subject: Mechanical Measurement & Metrology. Class: T.E. (Mech) Sem V Module 3 & 4Документ1 страницаSubject: Mechanical Measurement & Metrology. Class: T.E. (Mech) Sem V Module 3 & 4Ashley_RulzzzzzzzОценок пока нет
- CRMДокумент50 страницCRMAshley_RulzzzzzzzОценок пока нет
- Subject: Mechanical Measurement & Metrology. Class: T.E. (Mech) Sem VДокумент1 страницаSubject: Mechanical Measurement & Metrology. Class: T.E. (Mech) Sem VAshley_RulzzzzzzzОценок пока нет
- Assignment 2012 2Документ1 страницаAssignment 2012 2Ashley_RulzzzzzzzОценок пока нет
- Pressure MeasurementДокумент22 страницыPressure MeasurementAshley_Rulzzzzzzz100% (1)
- Assignment 2012 4Документ1 страницаAssignment 2012 4Ashley_RulzzzzzzzОценок пока нет
- Identification of Potential Investment Opportunities - The CapitalДокумент4 страницыIdentification of Potential Investment Opportunities - The CapitalAshley_RulzzzzzzzОценок пока нет
- Errors in MeasurementДокумент19 страницErrors in MeasurementAshley_RulzzzzzzzОценок пока нет
- Static and Dynamic CharacteristicsДокумент10 страницStatic and Dynamic CharacteristicsAshley_RulzzzzzzzОценок пока нет
- E Security E PaymentДокумент70 страницE Security E PaymentAshley_RulzzzzzzzОценок пока нет
- Manual PDFДокумент750 страницManual PDFTRONGОценок пока нет
- Maxwell's Displacement Current Revisited: J D JacksonДокумент9 страницMaxwell's Displacement Current Revisited: J D JacksonPrabakaran RajendranОценок пока нет
- Selection Calculations For Motors PDFДокумент17 страницSelection Calculations For Motors PDFbibhansuОценок пока нет
- Complete Overview of Lightning Arresters Part 3Документ7 страницComplete Overview of Lightning Arresters Part 3Robert GalarzaОценок пока нет
- Entropy DefinitionДокумент2 страницыEntropy DefinitionFery Reykha OmbingОценок пока нет
- Ece III Network Analysis (10es34) NotesДокумент111 страницEce III Network Analysis (10es34) NotesGautam Sharma80% (10)
- Tutorial Material Data InputДокумент6 страницTutorial Material Data InputJavier TrujillanoОценок пока нет
- rt6 DatasheetДокумент4 страницыrt6 Datasheetrajeshgat2008Оценок пока нет
- DC Motors: Ahmed M. T. Ibraheem AlnaibДокумент18 страницDC Motors: Ahmed M. T. Ibraheem AlnaibsoraОценок пока нет
- Coal Analysis For vtps-500MWДокумент90 страницCoal Analysis For vtps-500MWJagadeesh NetiОценок пока нет
- Robust Control of A Multi-Phase Interleaved Boost ConverterДокумент148 страницRobust Control of A Multi-Phase Interleaved Boost ConverterArmando Cavero MirandaОценок пока нет
- Basic Operations With Force Systems (Short)Документ40 страницBasic Operations With Force Systems (Short)Kirk JamisonОценок пока нет
- Mine Environment by Prof. G.B. Mishra PDFДокумент322 страницыMine Environment by Prof. G.B. Mishra PDFsaurabh singh100% (1)
- Workshop Manual 1996 - 2000Документ36 страницWorkshop Manual 1996 - 2000EduRoiОценок пока нет
- 1.experiment On Single Rotor SystemДокумент8 страниц1.experiment On Single Rotor SystemRahul Kumar DwivediОценок пока нет
- As Newtons Laws and Momentum QuestionsДокумент61 страницаAs Newtons Laws and Momentum Questionshasan_shahryar2008Оценок пока нет
- Experiment 01Документ15 страницExperiment 01frank samndomiОценок пока нет
- Physics Cl10 Assign16Документ2 страницыPhysics Cl10 Assign16Tapas Banerjee100% (1)
- 113 Current Monitoring Relay of Imin and Imax in 1P - AC/DC: PRI-41, PRI-42Документ1 страница113 Current Monitoring Relay of Imin and Imax in 1P - AC/DC: PRI-41, PRI-42N_LocusОценок пока нет
- 4 André Gretler - ANSI Vs IEC APW ChileДокумент74 страницы4 André Gretler - ANSI Vs IEC APW ChileTopografia MecanicaОценок пока нет
- Short Wave Diathermy: by Pallavi Chogale Pranali MahajanДокумент32 страницыShort Wave Diathermy: by Pallavi Chogale Pranali MahajanNeha Dhobale100% (3)
- Bahagian A: Kertas 2Документ17 страницBahagian A: Kertas 2wahidms84Оценок пока нет
- Section5 7Документ6 страницSection5 7sonti11Оценок пока нет
- VSB ManualДокумент166 страницVSB Manualmukul9040Оценок пока нет
- Fundamentals of Electronics - Awais YasinДокумент185 страницFundamentals of Electronics - Awais YasinAsif HameedОценок пока нет
- Upgrading The ProtectionДокумент4 страницыUpgrading The ProtectionMukesh KumarОценок пока нет
- WIZ SeriesДокумент4 страницыWIZ SeriesJon HamonОценок пока нет
- Engineering Properties (Al O) : 94% Aluminum Oxide Mechanical Units of Measure SI/Metric (Imperial)Документ7 страницEngineering Properties (Al O) : 94% Aluminum Oxide Mechanical Units of Measure SI/Metric (Imperial)Hendy SetiawanОценок пока нет
- 320C - Diagrama Eletrico (Ar-Condicionado)Документ2 страницы320C - Diagrama Eletrico (Ar-Condicionado)Oficina FernandinhoОценок пока нет
- Hero Found: The Greatest POW Escape of the Vietnam WarОт EverandHero Found: The Greatest POW Escape of the Vietnam WarРейтинг: 4 из 5 звезд4/5 (19)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureОт EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureРейтинг: 5 из 5 звезд5/5 (125)
- The End of Craving: Recovering the Lost Wisdom of Eating WellОт EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellРейтинг: 4.5 из 5 звезд4.5/5 (82)
- Sully: The Untold Story Behind the Miracle on the HudsonОт EverandSully: The Untold Story Behind the Miracle on the HudsonРейтинг: 4 из 5 звезд4/5 (103)
- The Fabric of Civilization: How Textiles Made the WorldОт EverandThe Fabric of Civilization: How Textiles Made the WorldРейтинг: 4.5 из 5 звезд4.5/5 (58)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestОт EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestРейтинг: 4 из 5 звезд4/5 (28)
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4 из 5 звезд4/5 (6)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachОт EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachРейтинг: 3.5 из 5 звезд3.5/5 (6)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОт EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОт EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОценок пока нет
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationОт EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationРейтинг: 4.5 из 5 звезд4.5/5 (46)
- Pale Blue Dot: A Vision of the Human Future in SpaceОт EverandPale Blue Dot: A Vision of the Human Future in SpaceРейтинг: 4.5 из 5 звезд4.5/5 (588)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceОт EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (5)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreОт EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreРейтинг: 4.5 из 5 звезд4.5/5 (33)
- The Book of the Moon: A Guide to Our Closest NeighborОт EverandThe Book of the Moon: A Guide to Our Closest NeighborРейтинг: 4.5 из 5 звезд4.5/5 (11)
- Restoration Agriculture: Real-World Permaculture for FarmersОт EverandRestoration Agriculture: Real-World Permaculture for FarmersРейтинг: 4.5 из 5 звезд4.5/5 (86)
- Project Management All-in-One For DummiesОт EverandProject Management All-in-One For DummiesРейтинг: 5 из 5 звезд5/5 (6)
- Reality+: Virtual Worlds and the Problems of PhilosophyОт EverandReality+: Virtual Worlds and the Problems of PhilosophyРейтинг: 4 из 5 звезд4/5 (24)
- Process Plant Equipment: Operation, Control, and ReliabilityОт EverandProcess Plant Equipment: Operation, Control, and ReliabilityРейтинг: 5 из 5 звезд5/5 (1)