Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Jujutsu Kaisen, Volume 23, Chapter 225 - The Decesive Battle (3) - Jujutsu Kaisen Manga OnlineДокумент20 страницJujutsu Kaisen, Volume 23, Chapter 225 - The Decesive Battle (3) - Jujutsu Kaisen Manga OnlinemarileyserОценок пока нет
- Knut - Fleur de LisДокумент10 страницKnut - Fleur de LisoierulОценок пока нет
- Analysis of Effectiveness of Heat Exchanger Shell and Tube Type One Shell Two Tube Pass As Cooling OilДокумент6 страницAnalysis of Effectiveness of Heat Exchanger Shell and Tube Type One Shell Two Tube Pass As Cooling OilHendrik V SihombingОценок пока нет
- Working With Regular Expressions: Prof. Mary Grace G. VenturaДокумент26 страницWorking With Regular Expressions: Prof. Mary Grace G. VenturaAngela BeatriceОценок пока нет
- Soal Respi 2010Документ41 страницаSoal Respi 2010Joseph ThanaОценок пока нет
- Remarkings AirportsДокумент1 страницаRemarkings AirportsJuan Jose CaleroОценок пока нет
- Case Study 3Документ6 страницCase Study 3monika_pratiwi_2Оценок пока нет
- A Book of Beasts PDFДокумент32 страницыA Book of Beasts PDFbrad drac100% (2)
- Noorul Islam Centre For Higher Education Noorul Islam University, Kumaracoil M.E. Biomedical Instrumentation Curriculum & Syllabus Semester IДокумент26 страницNoorul Islam Centre For Higher Education Noorul Islam University, Kumaracoil M.E. Biomedical Instrumentation Curriculum & Syllabus Semester Iisaac RОценок пока нет
- FS 1 Activity 3.3Документ6 страницFS 1 Activity 3.3HYACINTH GALLENEROОценок пока нет
- Christian Education of Zendeling-Based at The Kalimantan Evangelical Church (GKE)Документ16 страницChristian Education of Zendeling-Based at The Kalimantan Evangelical Church (GKE)Editor IjrssОценок пока нет
- Chapter - 2: Project AdministrationДокумент69 страницChapter - 2: Project AdministrationRenish RanganiОценок пока нет
- What If The Class Is Very BigДокумент2 страницыWhat If The Class Is Very BigCamilo CarantónОценок пока нет
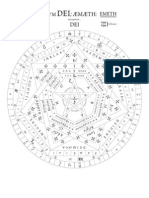
- John Dee - Sigillum Dei Aemeth or Seal of The Truth of God EnglishДокумент2 страницыJohn Dee - Sigillum Dei Aemeth or Seal of The Truth of God Englishsatyr70286% (7)
- Checkpoint PhysicsДокумент12 страницCheckpoint PhysicsRishika Bafna100% (1)
- Mag Issue137 PDFДокумент141 страницаMag Issue137 PDFShafiq Nezat100% (1)
- Text Mapping: Reading For General InterestДокумент17 страницText Mapping: Reading For General InterestIndah Rizki RamadhaniОценок пока нет
- The Cave Tab With Lyrics by Mumford and Sons Guitar TabДокумент2 страницыThe Cave Tab With Lyrics by Mumford and Sons Guitar TabMassimiliano MalerbaОценок пока нет
- Herramientas para Pronosticar en STATAДокумент53 страницыHerramientas para Pronosticar en STATAMarcos Polo100% (1)
- Advisory Board ResearchДокумент6 страницAdvisory Board Researcheaw12Оценок пока нет
- Sample DCCM, DLHTM and DCLRДокумент38 страницSample DCCM, DLHTM and DCLREagle100% (5)
- MQM100 MultipleChoice Chapter2Документ9 страницMQM100 MultipleChoice Chapter2Nakin KОценок пока нет
- 07.03.09 Chest PhysiotherapyДокумент10 страниц07.03.09 Chest PhysiotherapyMuhammad Fuad MahfudОценок пока нет
- Anxiety DisordersДокумент10 страницAnxiety DisordersAhmed AntarОценок пока нет
- Aswini Expert SystemsДокумент37 страницAswini Expert SystemsKarishma Satheesh KumarОценок пока нет
- An Aging Game Simulation Activity For Al PDFДокумент13 страницAn Aging Game Simulation Activity For Al PDFramzan aliОценок пока нет
- Correct Translation of 2-16Документ19 страницCorrect Translation of 2-16muhammad_zubair708110Оценок пока нет
- Anais Nin - Under A Glass Bell-Pages-29-32 WordДокумент6 страницAnais Nin - Under A Glass Bell-Pages-29-32 WordArmina MОценок пока нет
- AQA Music A LevelДокумент10 страницAQA Music A LevelHindy LaiОценок пока нет
- Iver Brevik, Olesya Gorbunova and Diego Saez-Gomez - Casimir Effects Near The Big Rip Singularity in Viscous CosmologyДокумент7 страницIver Brevik, Olesya Gorbunova and Diego Saez-Gomez - Casimir Effects Near The Big Rip Singularity in Viscous CosmologyDex30KMОценок пока нет