Вам также может понравиться
- Introducción A Los Modelo de RegresiónДокумент19 страницIntroducción A Los Modelo de RegresiónrogerfernandezhidalgОценок пока нет
- Prácticas 14 de AbrilДокумент5 страницPrácticas 14 de AbrilNacho Yunta GarciaОценок пока нет
- Actividad 5Документ6 страницActividad 5LuzSanchezОценок пока нет
- Unidad IV. Teoría de La Valuación de ValoresДокумент24 страницыUnidad IV. Teoría de La Valuación de Valoresmaria rodriguezОценок пока нет
- Solucion Taller MicroeconomiaДокумент9 страницSolucion Taller MicroeconomiaDavid Melo100% (1)
- UntitledДокумент222 страницыUntitledHernández Fernández AngélicaОценок пока нет
- Ejemplo Modelo ProbitДокумент11 страницEjemplo Modelo Probitmnt gpe100% (1)
- Economía Matemática Ciro BДокумент389 страницEconomía Matemática Ciro BKimberly Tatiana Villegas ZumaetaОценок пока нет
- Teoría de GrafosДокумент6 страницTeoría de GrafosjulioorellanaОценок пока нет
- Primer Examen Econometría II. Alejandra CejaДокумент2 страницыPrimer Examen Econometría II. Alejandra CejaALEJANDRA CEJA DEL MORAL0% (1)
- Modelos VARДокумент39 страницModelos VARLuis Alberto Bautista BautistaОценок пока нет
- Introducción A La Optimización DinámicaДокумент37 страницIntroducción A La Optimización DinámicaJuancho PalОценок пока нет
- Teoria de GrafosДокумент17 страницTeoria de GrafosAnahi Toapanta GuanoquizaОценок пока нет
- Cálculo Diferencial en RДокумент40 страницCálculo Diferencial en RAMYNNXXXXОценок пока нет
- Notas de Clase Microeconomía IIДокумент111 страницNotas de Clase Microeconomía IIcocodrile666Оценок пока нет
- Econometria EspacialДокумент33 страницыEconometria Espacialarteuni1Оценок пока нет
- Conjuntos NumericosДокумент38 страницConjuntos NumericosMaxi PérezОценок пока нет
- Modelizacion Matematica de La Dinamica Predador-PresaДокумент32 страницыModelizacion Matematica de La Dinamica Predador-Presaolga alegriaОценок пока нет
- Métodos Matemáticos en La EconomíaДокумент1 страницаMétodos Matemáticos en La EconomíaHeidi CabreraОценок пока нет
- Notas de Calculo Diferencial PDFДокумент190 страницNotas de Calculo Diferencial PDFPablo EliasОценок пока нет
- Historia de La EconometríaДокумент61 страницаHistoria de La EconometríadopienagОценок пока нет
- Optimizaciefbfbdn Con Restricciones de DesigualdadДокумент19 страницOptimizaciefbfbdn Con Restricciones de Desigualdad_oooo_Оценок пока нет
- Teoria de Control OptimoДокумент10 страницTeoria de Control OptimoYohanna Helen100% (1)
- Dialnet AnalisisDelDiscursoMatematicoEscolarEnLosLibrosDeT 5672145 PDFДокумент20 страницDialnet AnalisisDelDiscursoMatematicoEscolarEnLosLibrosDeT 5672145 PDFjose marioОценок пока нет
- CLASE - 1-Introducción A Las FuncionesДокумент18 страницCLASE - 1-Introducción A Las FuncionesFranchesca RobalinoОценок пока нет
- EIA Planta de Cal Copiapo-Horno Cal 2Документ40 страницEIA Planta de Cal Copiapo-Horno Cal 2Carlos GamarraОценок пока нет
- M. Especiales Cap.1 Diferencias Finitas PDFДокумент33 страницыM. Especiales Cap.1 Diferencias Finitas PDFDanielaVelezRamirezОценок пока нет
- Raices Unitarias Estacionales y Test HegyДокумент6 страницRaices Unitarias Estacionales y Test HegyyoxstlОценок пока нет
- 09 Optimizacion Con Restricciones de DesigualdadДокумент29 страниц09 Optimizacion Con Restricciones de DesigualdadDavid BendezuОценок пока нет
- MacroAvanzadaUdeSA Syllabus 2020 PDFДокумент5 страницMacroAvanzadaUdeSA Syllabus 2020 PDFnorres pondeОценок пока нет
- Valor EsperadoДокумент9 страницValor EsperadoLuis Arturo Pola NiñosОценок пока нет
- La Modelización Matemàtica en La Escuela SecundariaДокумент20 страницLa Modelización Matemàtica en La Escuela SecundariaAzu ValenciaОценок пока нет
- Econometria Trabajo Ultimo ApaДокумент9 страницEconometria Trabajo Ultimo ApaDamaris OrtegaОценок пока нет
- Regresión Logarítmica SimpleДокумент12 страницRegresión Logarítmica SimpleAndres Araujo Falcon SklamОценок пока нет
- S14 - PPT - Valores y Vectores PropiosДокумент25 страницS14 - PPT - Valores y Vectores PropiosandyОценок пока нет
- Series Con DemostracionesДокумент8 страницSeries Con DemostracionesWalter CaballeroОценок пока нет
- EulerДокумент4 страницыEulermarihvibeОценок пока нет
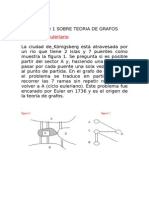
- Ejemplos Sobre Teoria de GrafosДокумент8 страницEjemplos Sobre Teoria de GrafosHernán ArmijosОценок пока нет
- Instalaciones HIDRAULICAS AGUA FRIA Y CALIENTE WordДокумент60 страницInstalaciones HIDRAULICAS AGUA FRIA Y CALIENTE WordMamani Sosa Lizbet LidiaОценок пока нет
- Programación Dinámica PDFДокумент16 страницProgramación Dinámica PDFAriadna Villanueva OrtegaОценок пока нет
- Guia de EstadisticaДокумент35 страницGuia de EstadisticaLYNNETH PEREIRAОценок пока нет
- MulticolineidadДокумент21 страницаMulticolineidadJose PepeОценок пока нет
- Ecuaciones Diferenciales MatlabДокумент7 страницEcuaciones Diferenciales MatlabJuan Ruiz TelloОценок пока нет
- Metodo de Diferencias FinitasДокумент12 страницMetodo de Diferencias FinitasA.j. ZackОценок пока нет
- Capeco-Codigo y Reglamento de Conducta EticaДокумент16 страницCapeco-Codigo y Reglamento de Conducta EticaIngCivil UpnОценок пока нет
- Introducción A La Econometría de Series de TiempoДокумент3 страницыIntroducción A La Econometría de Series de Tiempoks_spyroОценок пока нет
- Ecuaciones Diferenciales de Derivadas Parciales - Ramon AbascalДокумент73 страницыEcuaciones Diferenciales de Derivadas Parciales - Ramon AbascalJuancarlosОценок пока нет
- Sucesiones Series Dario SanchezДокумент3 страницыSucesiones Series Dario Sanchezriko virusОценок пока нет
- Ley de Los Grandes NumerosДокумент9 страницLey de Los Grandes NumerosDavidAlmeidaОценок пока нет
- Notas de Análisis Real - Eugenio P. BalanzarioДокумент144 страницыNotas de Análisis Real - Eugenio P. BalanzarioRoberto CarlosОценок пока нет
- Curso de Econometria BasicaДокумент89 страницCurso de Econometria BasicaDaniel Matheus100% (1)
- Grafos y Sus AplicacionesДокумент12 страницGrafos y Sus Aplicacioneshdgv0% (1)
- Taller V Optimización Con Restricciones de DesigualdadДокумент5 страницTaller V Optimización Con Restricciones de DesigualdadJohan ColoradoОценок пока нет
- Series de TiempoДокумент79 страницSeries de TiempoJafet Diaz NarcisoОценок пока нет
- Guía Estadística MatemáticaДокумент285 страницGuía Estadística MatemáticaLuis Eloy Joglar BoudetОценок пока нет
- Linealización de Modelos Matemáticos No LinealesДокумент13 страницLinealización de Modelos Matemáticos No LinealesGloria Del AbraОценок пока нет
- Ecuaciones DiferencialesДокумент6 страницEcuaciones DiferencialesGeovanny Moisés PanchanaОценок пока нет
- Matrices Escalonadas ReducidasДокумент4 страницыMatrices Escalonadas ReducidasOmar Enrique Molaya DuranОценок пока нет
- Estadistica InferencialДокумент160 страницEstadistica InferencialKimberly Marin Torres100% (2)
- El valor económico de la calidad ambiental urbana: Un análisis espacial para las comunas y barrios de CaliОт EverandEl valor económico de la calidad ambiental urbana: Un análisis espacial para las comunas y barrios de CaliОценок пока нет
- Tema2 PDFДокумент28 страницTema2 PDFAnonymous 7HFP8sОценок пока нет
- 3-Análisis de Excitación en CA y CDДокумент15 страниц3-Análisis de Excitación en CA y CDMarte Valdez0% (1)
- Encuesta Uso de TICS en EducacionДокумент2 страницыEncuesta Uso de TICS en EducacionMarte ValdezОценок пока нет
- CONTROL DE LECTURA TIC S APLICADAS A LA EDUCACIONДокумент24 страницыCONTROL DE LECTURA TIC S APLICADAS A LA EDUCACIONMarte ValdezОценок пока нет
- Practica Sensores de TemperaturaДокумент6 страницPractica Sensores de TemperaturaMarte ValdezОценок пока нет
- Inversor de Giro de Motor DCДокумент1 страницаInversor de Giro de Motor DCMarte ValdezОценок пока нет
- Ejercicios de Programacion LogixProДокумент10 страницEjercicios de Programacion LogixProMarte Valdez50% (4)
- Nomenclatura TransistoresДокумент4 страницыNomenclatura TransistoresMarte ValdezОценок пока нет
- Casos 3 RC y RVДокумент3 страницыCasos 3 RC y RVMAYBEE ALEJA ALVAREZ GONZALES50% (2)
- Marketing Industrial Unidad 1 2018 1 ResДокумент57 страницMarketing Industrial Unidad 1 2018 1 ResSebastian GordonОценок пока нет
- Proyecto de Inversion Social Equipo # 1Документ8 страницProyecto de Inversion Social Equipo # 1Cristela LamedaОценок пока нет
- 3ra - Sem - Los Estratos Sociales y Los Niveles Socioeconómicos enДокумент12 страниц3ra - Sem - Los Estratos Sociales y Los Niveles Socioeconómicos enAstrith Huaman MendozaОценок пока нет
- Gerencia de Marketing - Cerveza Sin AlcoholДокумент47 страницGerencia de Marketing - Cerveza Sin AlcoholNelly Isabel Narvaez PachecoОценок пока нет
- Silabo Principios de Economía 2022 2Документ4 страницыSilabo Principios de Economía 2022 2ALISON ORTEGA100% (1)
- C Sem07 PDFДокумент5 страницC Sem07 PDFD Nk PeláezОценок пока нет
- Examen 4 METODOS PROBABILISTICOSДокумент1 страницаExamen 4 METODOS PROBABILISTICOSBryan CáceresОценок пока нет
- Auditoría Bienes de CambioДокумент26 страницAuditoría Bienes de Cambiodario nuñezОценок пока нет
- Mac T4 Apuntes IДокумент17 страницMac T4 Apuntes Iaitorc711Оценок пока нет
- Planta de Hormigón Proyecto5 PDFДокумент193 страницыPlanta de Hormigón Proyecto5 PDFAlejandro Ernesto CoronadoОценок пока нет
- Semana 5Документ4 страницыSemana 5Yolita Cazorla HuamanОценок пока нет
- PDFДокумент162 страницыPDFkenОценок пока нет
- La Variacion de DerivadosДокумент20 страницLa Variacion de DerivadosJhon EscalanteОценок пока нет
- Diferencia de Keynes Con El Modelo ISLMДокумент26 страницDiferencia de Keynes Con El Modelo ISLMchuky2000100% (1)
- Act. 3 CostosДокумент4 страницыAct. 3 CostosMARIENE SUZET HERNANDEZMONTOYAОценок пока нет
- The JonesesДокумент4 страницыThe JonesesAngela Elizabeth Alberto MunnichОценок пока нет
- Promesa de Venta Pimentel - Monroy Doral 4 - 7Документ6 страницPromesa de Venta Pimentel - Monroy Doral 4 - 7Sofía Vera GarcíaОценок пока нет
- Trabajo Final MacroeconomíaДокумент19 страницTrabajo Final MacroeconomíaInésMeléndezОценок пока нет
- Contraloría, Ejercicios ResueltosДокумент83 страницыContraloría, Ejercicios ResueltosDaniel0% (1)
- Unidad Iii - Flujos de Efectivo - Estado de Origen y Aplicacion de FondosДокумент24 страницыUnidad Iii - Flujos de Efectivo - Estado de Origen y Aplicacion de FondosLucia GuillenОценок пока нет
- Espinoza Tesis Titulo 2017Документ159 страницEspinoza Tesis Titulo 2017Samir Stalin AcuñaОценок пока нет
- Planta CafeДокумент168 страницPlanta Cafemaribel yucra callataОценок пока нет
- Tarea MicroeconomicaДокумент8 страницTarea MicroeconomicaKströ CacexiesОценок пока нет
- AriesДокумент10 страницAriesAdriana LópezОценок пока нет
- Tying y BundlingДокумент16 страницTying y BundlingSarah NixonОценок пока нет