Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Group 4 HR201 Last Case StudyДокумент3 страницыGroup 4 HR201 Last Case StudyMatt Tejada100% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- UW Computational-Finance & Risk Management Brochure Final 080613Документ2 страницыUW Computational-Finance & Risk Management Brochure Final 080613Rajel MokОценок пока нет
- BAR Digest MenuДокумент4 страницыBAR Digest MenuFloila Jane YmasОценок пока нет
- Theme Meal ReportДокумент10 страницTheme Meal Reportapi-434982019Оценок пока нет
- Statistic Toolbox 2Документ2 страницыStatistic Toolbox 2Ahasan UllaОценок пока нет
- Gas Turbine Power Station: American International University-Bangladesh (AIUB)Документ35 страницGas Turbine Power Station: American International University-Bangladesh (AIUB)Ahasan Ulla100% (2)
- Pipeline DiagramsДокумент1 страницаPipeline DiagramsAhasan UllaОценок пока нет
- Laplace TransformationДокумент10 страницLaplace TransformationAhasan UllaОценок пока нет
- Gas Turbine Power Station: American International University-Bangladesh (AIUB)Документ35 страницGas Turbine Power Station: American International University-Bangladesh (AIUB)Ahasan Ulla100% (2)
- Paper Title (Use Style: Paper Title) : Subtitle As Needed (Paper Subtitle)Документ6 страницPaper Title (Use Style: Paper Title) : Subtitle As Needed (Paper Subtitle)Ahasan UllaОценок пока нет
- Pipe LiningДокумент37 страницPipe LiningAhasan UllaОценок пока нет
- Energy RatesДокумент36 страницEnergy RatesAhasan UllaОценок пока нет
- Arduino Tips Tricks and TechniquesДокумент39 страницArduino Tips Tricks and TechniquesVinay Nagnath JokareОценок пока нет
- Math Handbook of Formulas, Processes and Tricks: TrigonometryДокумент33 страницыMath Handbook of Formulas, Processes and Tricks: TrigonometryWilliam KohОценок пока нет
- Internship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Документ59 страницInternship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Mohammad Shafaet JamilОценок пока нет
- Chapter 7 - Cash BudgetДокумент23 страницыChapter 7 - Cash BudgetMostafa KaghaОценок пока нет
- Mini Ice Plant Design GuideДокумент4 страницыMini Ice Plant Design GuideDidy RobotIncorporatedОценок пока нет
- UKIERI Result Announcement-1Документ2 страницыUKIERI Result Announcement-1kozhiiiОценок пока нет
- ARMOR Winter-Spring 2018 EditionДокумент84 страницыARMOR Winter-Spring 2018 Editionmai100Оценок пока нет
- Iitk Syllabus PDFДокумент520 страницIitk Syllabus PDFcombatps1Оценок пока нет
- Database Chapter 11 MCQs and True/FalseДокумент2 страницыDatabase Chapter 11 MCQs and True/FalseGauravОценок пока нет
- Fabric Bursting StrengthДокумент14 страницFabric Bursting StrengthQaiseriqball100% (5)
- Salary Slip Oct PacificДокумент1 страницаSalary Slip Oct PacificBHARAT SHARMAОценок пока нет
- Chapter 1 Qus OnlyДокумент28 страницChapter 1 Qus OnlySaksharОценок пока нет
- CORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Документ2 страницыCORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Sanjeev MansotraОценок пока нет
- Diagnostic Information For Database Replay IssuesДокумент10 страницDiagnostic Information For Database Replay IssuesjjuniorlopesОценок пока нет
- Green Management: Nestlé's Approach To Green Management 1. Research and DevelopmentДокумент6 страницGreen Management: Nestlé's Approach To Green Management 1. Research and DevelopmentAbaidullah TanveerОценок пока нет
- Weibull Statistic and Growth Analysis in Failure PredictionsДокумент9 страницWeibull Statistic and Growth Analysis in Failure PredictionsgmitsutaОценок пока нет
- Taxation of interest income paid to foreign corporationsДокумент1 страницаTaxation of interest income paid to foreign corporationsCass CataloОценок пока нет
- An Overview of Tensorflow + Deep learning 沒一村Документ31 страницаAn Overview of Tensorflow + Deep learning 沒一村Syed AdeelОценок пока нет
- Conplast SP430 0407Документ4 страницыConplast SP430 0407Harz IndОценок пока нет
- ANDRITZ Company Presentation eДокумент6 страницANDRITZ Company Presentation eAnonymous OuY6oAMggxОценок пока нет
- Unit 1 2marksДокумент5 страницUnit 1 2marksLokesh SrmОценок пока нет
- Berry B Brey Part IДокумент49 страницBerry B Brey Part Ikalpesh_chandakОценок пока нет
- BA 9000 - NIJ CTP Body Armor Quality Management System RequirementsДокумент6 страницBA 9000 - NIJ CTP Body Armor Quality Management System RequirementsAlberto GarciaОценок пока нет
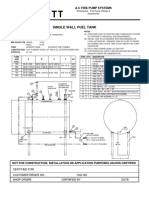
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsДокумент1 страницаSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoОценок пока нет
- Venturi Meter and Orifice Meter Flow Rate CalculationsДокумент2 страницыVenturi Meter and Orifice Meter Flow Rate CalculationsVoora GowthamОценок пока нет
- Hardened Concrete - Methods of Test: Indian StandardДокумент16 страницHardened Concrete - Methods of Test: Indian StandardjitendraОценок пока нет
- Globalisation - Theories of Digital CommunicationДокумент12 страницGlobalisation - Theories of Digital CommunicationDiya Patel-10SОценок пока нет
- Janapriya Journal of Interdisciplinary Studies - Vol - 6Документ186 страницJanapriya Journal of Interdisciplinary Studies - Vol - 6abiskarОценок пока нет