Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Absen Meeting ProjectДокумент1 страницаAbsen Meeting ProjectadamzlametОценок пока нет
- Setting Up Webmail For Microsoft Outlook Express: Windows 2000/XpДокумент3 страницыSetting Up Webmail For Microsoft Outlook Express: Windows 2000/XpadamzlametОценок пока нет
- Weld SchedulesДокумент7 страницWeld SchedulesadamzlametОценок пока нет
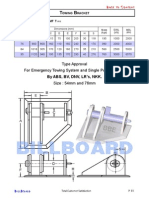
- Type Approval For Emergency Towing System and Single Point MooringДокумент1 страницаType Approval For Emergency Towing System and Single Point MooringadamzlametОценок пока нет
- Rumus Crash StopДокумент3 страницыRumus Crash StopadamzlametОценок пока нет
- Load Index ChartДокумент2 страницыLoad Index ChartadamzlametОценок пока нет
- Callnames (Parte 1 de 4) - ByGOALДокумент76 страницCallnames (Parte 1 de 4) - ByGOALadamzlametОценок пока нет
- Yanmar 6AYM WET Datasheet 3Документ2 страницыYanmar 6AYM WET Datasheet 3adamzlamet33% (3)
- How To Uninstall NetCut Defender - Uninstall NetCut CompletelyДокумент1 страницаHow To Uninstall NetCut Defender - Uninstall NetCut CompletelyadamzlametОценок пока нет
- Navigation Lamp Wiring: by James W. HebertДокумент2 страницыNavigation Lamp Wiring: by James W. HebertadamzlametОценок пока нет
- 074 The Helideck ManualДокумент50 страниц074 The Helideck Manualadamzlamet100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- EicherДокумент19 страницEicherKśm ŠhêîkhОценок пока нет
- Rajan - Intermediate Structural Analysis and DesignДокумент794 страницыRajan - Intermediate Structural Analysis and DesignPoppy Moore100% (1)
- Fracture Modeling: Petrel 2011Документ9 страницFracture Modeling: Petrel 2011Marcelo SaezОценок пока нет
- FEA of RC Slab With OpeningДокумент4 страницыFEA of RC Slab With OpeningMelkamu DemewezОценок пока нет
- 667 MehdiДокумент10 страниц667 MehdiInnah Rahman PutryОценок пока нет
- Kanchan ReportxДокумент90 страницKanchan ReportxAnonymous hu42KMОценок пока нет
- (Applied Mathematical Sciences 132) Frank Ihlenburg (Eds.) - Finite Element Analysis of Acoustic Scattering-Springer-Verlag New York (1998)Документ241 страница(Applied Mathematical Sciences 132) Frank Ihlenburg (Eds.) - Finite Element Analysis of Acoustic Scattering-Springer-Verlag New York (1998)Gianpiero BoccatoОценок пока нет
- MMECM-Computer Integrated ManufacturingДокумент25 страницMMECM-Computer Integrated ManufacturingSmilo2013Оценок пока нет
- Basic Programming With Elmer: 1.1 Calling ConventionДокумент14 страницBasic Programming With Elmer: 1.1 Calling ConventionMartin CaicedoОценок пока нет
- 2D Simulations and Electro-Thermal Analysis of Micro-Heater Using COMSOLДокумент4 страницы2D Simulations and Electro-Thermal Analysis of Micro-Heater Using COMSOLshobiiiscОценок пока нет
- Modelling Consolidation Behavior of Embankment Using PlaxisДокумент6 страницModelling Consolidation Behavior of Embankment Using PlaxisSoumyadeep SenguptaОценок пока нет
- Numerical Simulation of 3D Dynamic Garment PressureДокумент8 страницNumerical Simulation of 3D Dynamic Garment PressureGonzalo NavarroОценок пока нет
- Tower Analysis - More Then A Truss PDFДокумент12 страницTower Analysis - More Then A Truss PDFrichificОценок пока нет
- Finite Element Methods For Partial Differential Equations PDFДокумент106 страницFinite Element Methods For Partial Differential Equations PDFDavid GomezОценок пока нет
- Tetrahedral ElementДокумент35 страницTetrahedral ElementkoyaniumangОценок пока нет
- (18044824 - Transactions of The VŠB - Technical University of Ostrava, Civil Engineering Series.) NUMERICAL ANALYSIS OF CASTELLATED BEAMДокумент7 страниц(18044824 - Transactions of The VŠB - Technical University of Ostrava, Civil Engineering Series.) NUMERICAL ANALYSIS OF CASTELLATED BEAMShinichi KudoОценок пока нет
- Whitepaper Spring ModelДокумент20 страницWhitepaper Spring ModelJose PerezОценок пока нет
- Bending of Uniformly Cantilever Rectangular PlatesДокумент13 страницBending of Uniformly Cantilever Rectangular PlatessattiОценок пока нет
- Matlab Implementation of FEM For ElasticityДокумент25 страницMatlab Implementation of FEM For ElasticityHussin KetoutОценок пока нет
- Code BrightДокумент1 страницаCode BrightTariq MahmoodОценок пока нет
- Aircraft Engine Nacelle StructuresДокумент314 страницAircraft Engine Nacelle Structuresamitu2bmine100% (1)
- Finite Element Methods For Unsaturated Porous Solids and Their Acallari2009 PDFДокумент17 страницFinite Element Methods For Unsaturated Porous Solids and Their Acallari2009 PDFAndrésHermannR.LeónОценок пока нет
- Centrifugal Gas CompressorsДокумент104 страницыCentrifugal Gas CompressorsMuhammad100% (9)
- MS Mechanical Engineering Course ContentsДокумент12 страницMS Mechanical Engineering Course ContentsEngr Nayyer Nayyab Malik100% (1)
- D. Study About AnsysДокумент6 страницD. Study About AnsysLaxmi RaoОценок пока нет
- Knjiga Predmeta enDoSДокумент544 страницыKnjiga Predmeta enDoSGideon Dr GreifОценок пока нет
- Lumped and Consistent Mass MatricesДокумент23 страницыLumped and Consistent Mass MatricesAlexandros GiОценок пока нет
- Direct and Min Total PE FormulationДокумент12 страницDirect and Min Total PE FormulationMansoorОценок пока нет
- Cad/cam From CipetДокумент6 страницCad/cam From CipetAp Mani MaranОценок пока нет
- Res 2 DmodДокумент12 страницRes 2 DmodConstantin Ungureanu100% (1)