Вам также может понравиться
- Chapter1-3 Sacchi PDFДокумент88 страницChapter1-3 Sacchi PDFMridula Mittal BansalОценок пока нет
- RadarДокумент748 страницRadarMridula Mittal BansalОценок пока нет
- Radar Systems NotesДокумент457 страницRadar Systems NotesMridula Mittal Bansal100% (2)
- Thermodynamics IIДокумент25 страницThermodynamics IIMridula Mittal BansalОценок пока нет
- 2 Simulation Study On 104 MHZ Radio Frequency Quadrupole Accelerator - ICEEE2010Документ4 страницы2 Simulation Study On 104 MHZ Radio Frequency Quadrupole Accelerator - ICEEE2010Mridula Mittal BansalОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Immigrant Italian Stone CarversДокумент56 страницImmigrant Italian Stone Carversglis7100% (2)
- Physical and Morphological Characterisation of Typha Australis FibresДокумент12 страницPhysical and Morphological Characterisation of Typha Australis FibresIJAR JOURNALОценок пока нет
- Sat Vocabulary Lesson and Practice Lesson 5Документ3 страницыSat Vocabulary Lesson and Practice Lesson 5api-430952728Оценок пока нет
- Technical Information: Range-Free Controller FA-M3 System Upgrade GuideДокумент33 страницыTechnical Information: Range-Free Controller FA-M3 System Upgrade GuideAddaОценок пока нет
- JC Series Jaw Crusher PDFДокумент8 страницJC Series Jaw Crusher PDFgarrybieber100% (1)
- Advanta V12 Data SheetДокумент2 страницыAdvanta V12 Data SheetJuliana MiyagiОценок пока нет
- Prestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanДокумент21 страницаPrestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanSumeet700005Оценок пока нет
- Biophoton RevolutionДокумент3 страницыBiophoton RevolutionVyavasayaha Anita BusicОценок пока нет
- Grade - 2 Subject - Mathematics Unit - Geometry Topic - Geometrical Shapes School - Army School Roorkee Prepared by Mrs. RanjanaДокумент25 страницGrade - 2 Subject - Mathematics Unit - Geometry Topic - Geometrical Shapes School - Army School Roorkee Prepared by Mrs. RanjanaPenke Mejado BelenОценок пока нет
- 4 Force & ExtensionДокумент13 страниц4 Force & ExtensionSelwah Hj AkipОценок пока нет
- The FOA Reference For Fiber Optics - Fiber Optic TestingДокумент19 страницThe FOA Reference For Fiber Optics - Fiber Optic TestingvsalaiselvamОценок пока нет
- Why Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmДокумент6 страницWhy Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmIsaac FernándezОценок пока нет
- Logic NotesДокумент19 страницLogic NotesCielo PulmaОценок пока нет
- De Vault 1996Документ22 страницыDe Vault 1996Harumi OOОценок пока нет
- Release From Destructive Covenants - D. K. OlukoyaДокумент178 страницRelease From Destructive Covenants - D. K. OlukoyaJemima Manzo100% (1)
- Piriformis Syndrome: Hardi Adiyatma, Shahdevi Nandar KusumaДокумент6 страницPiriformis Syndrome: Hardi Adiyatma, Shahdevi Nandar Kusumaismael wandikboОценок пока нет
- User'S Guide: Tm4C Series Tm4C129E Crypto Connected Launchpad Evaluation KitДокумент36 страницUser'S Guide: Tm4C Series Tm4C129E Crypto Connected Launchpad Evaluation KitLương Văn HưởngОценок пока нет
- Kinematics in One DimensionДокумент4 страницыKinematics in One DimensionAldrin VillanuevaОценок пока нет
- Highway-And-Railroad-Engineering SummaryДокумент15 страницHighway-And-Railroad-Engineering SummaryRodin James GabrilloОценок пока нет
- CheckList For Checking of Drawings-R1Документ4 страницыCheckList For Checking of Drawings-R1jatin kalraОценок пока нет
- Tugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaДокумент18 страницTugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaAndre Fahriz Perdana HarahapОценок пока нет
- Guia de CondensadoresДокумент193 страницыGuia de CondensadoresPaola Segura CorreaОценок пока нет
- SCM (Subway Project Report)Документ13 страницSCM (Subway Project Report)Beast aОценок пока нет
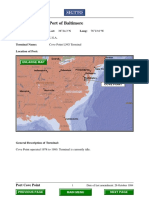
- Port Name: Port of BaltimoreДокумент17 страницPort Name: Port of Baltimoremohd1khairul1anuarОценок пока нет
- Determination of Drop-Impact Resistance of Plastic BottlesДокумент11 страницDetermination of Drop-Impact Resistance of Plastic BottlesAndres BrañaОценок пока нет
- Cisco 2500 Series RoutersДокумент16 страницCisco 2500 Series RoutersJull Quintero DazaОценок пока нет
- Fighting Techniques of The Early Modern World AD 1500-AD 1763 - Equipment Combat Skills Amp Amp TacticsДокумент258 страницFighting Techniques of The Early Modern World AD 1500-AD 1763 - Equipment Combat Skills Amp Amp Tacticslupoeva100% (3)
- EN Manual Lenovo Ideapad S130-14igm S130-11igmДокумент33 страницыEN Manual Lenovo Ideapad S130-14igm S130-11igmDolgoffОценок пока нет
- 41z S4hana2021 Set-Up en XXДокумент46 страниц41z S4hana2021 Set-Up en XXHussain MulthazimОценок пока нет
- 08 Activity 1 (10) (LM)Документ2 страницы08 Activity 1 (10) (LM)Jhanine Mae Oriola FortintoОценок пока нет