Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- ApplicationДокумент4 страницыApplicationAnoop MathewОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- JournalДокумент2 страницыJournalAnoop MathewОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Application For Empanelment of Real Estate AgenciesДокумент1 страницаApplication For Empanelment of Real Estate AgenciesAnoop MathewОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Artsenz Biz PlanДокумент1 страницаArtsenz Biz PlanAnoop MathewОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Armature Reaction and CommutationДокумент4 страницыArmature Reaction and CommutationAnoop MathewОценок пока нет
- Power Electronics Slides and Notes DC ConvertersДокумент40 страницPower Electronics Slides and Notes DC ConvertersAnoop MathewОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- 1) List of Important Details (Indian LLP)Документ4 страницы1) List of Important Details (Indian LLP)Anoop MathewОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesДокумент7 страницGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanОценок пока нет
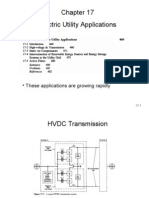
- Electric Utility Applications: - These Applications Are Growing RapidlyДокумент18 страницElectric Utility Applications: - These Applications Are Growing Rapidlyapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch29Документ12 страницPower Electronics Ned Mohan Slides Ch29Anoop MathewОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Power Electronics Ned Mohan Slides Ch27Документ24 страницыPower Electronics Ned Mohan Slides Ch27Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch28Документ26 страницPower Electronics Ned Mohan Slides Ch28Anoop MathewОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Power Electronics Ned Mohan Slides Ch30Документ48 страницPower Electronics Ned Mohan Slides Ch30Anoop MathewОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Power Electronics Ned Mohan Slides Ch25Документ17 страницPower Electronics Ned Mohan Slides Ch25Anoop MathewОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Power Electronics Ned Mohan Slides Ch26Документ44 страницыPower Electronics Ned Mohan Slides Ch26Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch22Документ35 страницPower Electronics Ned Mohan Slides Ch22Anoop MathewОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Thyristors (SCRS) : Lecture NotesДокумент14 страницThyristors (SCRS) : Lecture NotesBeverly PamanОценок пока нет
- Power Electronics Ned Mohan Slides Ch19Документ17 страницPower Electronics Ned Mohan Slides Ch19Anoop MathewОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Power Electronics Ned Mohan Slides Ch21Документ27 страницPower Electronics Ned Mohan Slides Ch21Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch1Документ12 страницPower Electronics Ned Mohan Slides Ch1Anoop MathewОценок пока нет
- Utility Interface: - Power Quality Has Become An Important IssueДокумент20 страницUtility Interface: - Power Quality Has Become An Important Issueapi-3705260Оценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- CH 20Документ27 страницCH 20avi013Оценок пока нет
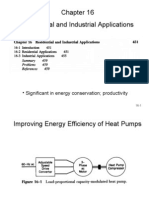
- Residential and Industrial Applications: - Significant in Energy Conservation ProductivityДокумент11 страницResidential and Industrial Applications: - Significant in Energy Conservation Productivityapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch26Документ44 страницыPower Electronics Ned Mohan Slides Ch26Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch25Документ17 страницPower Electronics Ned Mohan Slides Ch25Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch29Документ12 страницPower Electronics Ned Mohan Slides Ch29Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch30Документ48 страницPower Electronics Ned Mohan Slides Ch30Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch28Документ26 страницPower Electronics Ned Mohan Slides Ch28Anoop MathewОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Power Electronics Ned Mohan Slides Ch27Документ24 страницыPower Electronics Ned Mohan Slides Ch27Anoop MathewОценок пока нет
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesДокумент7 страницGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanОценок пока нет
- This Study Resource Was: EvaluateДокумент2 страницыThis Study Resource Was: EvaluateMary angel PerjesОценок пока нет
- Mathematics in The Modern World: Course No. Course Title Dean's InformationДокумент5 страницMathematics in The Modern World: Course No. Course Title Dean's InformationJayson SantelicesОценок пока нет
- Gantry Crane DesignДокумент2 страницыGantry Crane DesignSophia PoBari-Soter (MenaXrux)Оценок пока нет
- ProNest 2012 Data SheetДокумент2 страницыProNest 2012 Data Sheetalejandro777_eОценок пока нет
- Seam Strength of Corrugated Plate With High Strength SteelДокумент15 страницSeam Strength of Corrugated Plate With High Strength SteelMariano SalcedoОценок пока нет
- Structural Design 2Документ43 страницыStructural Design 2Meymuna AliОценок пока нет
- UML Class Diagram Examples of Common Scenarios - EdrawMaxДокумент12 страницUML Class Diagram Examples of Common Scenarios - EdrawMaxelizabeth enggОценок пока нет
- Na VI GrammarДокумент65 страницNa VI GrammarDaniel RăzvanОценок пока нет
- WSU Presentation 20220407Документ63 страницыWSU Presentation 20220407debapriyoОценок пока нет
- GTB-BOL VetrificadoДокумент19 страницGTB-BOL VetrificadoelduenoОценок пока нет
- PIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) FinalДокумент82 страницыPIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) Finalsamarrana1234679Оценок пока нет
- New EM Quiz13Документ4 страницыNew EM Quiz13Singh KaranОценок пока нет
- Plane and Solid Geometry Module 4Документ11 страницPlane and Solid Geometry Module 4Rose Marie Grimarin Fajutrao100% (1)
- Guest WiFi With MikroTik RoutersДокумент1 страницаGuest WiFi With MikroTik Routersmahad3vaОценок пока нет
- Chap. 1 Part 1 Physical PropertiesДокумент15 страницChap. 1 Part 1 Physical PropertiesAishwarrya NarayananОценок пока нет
- GTG Centaur 50 TurbomachineryДокумент86 страницGTG Centaur 50 TurbomachineryAlfian Aditya100% (3)
- SM 89Документ36 страницSM 89Camilo RamosОценок пока нет
- Economic Order QuantityДокумент3 страницыEconomic Order QuantitySudhakar DoijadОценок пока нет
- EE TermsДокумент25 страницEE TermsKerr AgotОценок пока нет
- Notebook PC Service Manual System Disassembly Model: - AMILO D 1845 (257SA0)Документ16 страницNotebook PC Service Manual System Disassembly Model: - AMILO D 1845 (257SA0)Robert DumitrescuОценок пока нет
- Friction Clutches PDFДокумент14 страницFriction Clutches PDFamanmittal0850% (2)
- CATL 37V 50ah Lithium Ternary Battery Cell - LiFePO4 BatteryДокумент4 страницыCATL 37V 50ah Lithium Ternary Battery Cell - LiFePO4 BatterymlutfimaОценок пока нет
- Tutorial Book 0.4Документ27 страницTutorial Book 0.4TonyandAnthonyОценок пока нет
- DS-003-2-En - Exertherm - IR06EMSC Sensor - ScreenДокумент2 страницыDS-003-2-En - Exertherm - IR06EMSC Sensor - ScreenMohammad AsifОценок пока нет
- A) I) Define The Term Variable Costs Variable Costs Are Costs That Change With The Quantity of Products SoldДокумент2 страницыA) I) Define The Term Variable Costs Variable Costs Are Costs That Change With The Quantity of Products SoldAleksandra LukanovskaОценок пока нет
- MagPi70 PDFДокумент100 страницMagPi70 PDFDaniel TuarezОценок пока нет
- Ekg 8Документ2 страницыEkg 8Arun SОценок пока нет
- 12 Physics Exemplar PDFДокумент130 страниц12 Physics Exemplar PDFPRATIM SADHU100% (1)
- PHP Question AnswerДокумент20 страницPHP Question AnswerManish SharmaОценок пока нет
- Sodium Metal MSDSДокумент4 страницыSodium Metal MSDSRama Krishnan HОценок пока нет
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialОт EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialОценок пока нет
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsОт EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Handbook on Battery Energy Storage SystemОт EverandHandbook on Battery Energy Storage SystemРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Global Landscape of Renewable Energy FinanceОт EverandGlobal Landscape of Renewable Energy FinanceОценок пока нет